Teknologi Kamera Penghitung Foton Megapiksel
Bayangkan sebuah kamera yang dirancang untuk menangkap gambar dengan resolusi satu foton pada 24.000 frame per detik. Berkat rana elektronik yang dapat tetap terbuka hanya selama 3,8 ns dan yang dapat disinkronkan dengan pulsa laser cepat dengan durasi hanya beberapa picodetik, seseorang dapat benar-benar melihat cahaya merambat melalui ruang angkasa. Dengan kemampuan ini, aplikasi baru terbuka seperti visi kuantum, pencitraan hantu, pencitraan sub-shot-noise, LiDAR kuantum, dan distilasi kuantum, untuk beberapa nama.
Umum untuk aplikasi ini adalah kebutuhan untuk deteksi foton tunggal dan resolusi waktu tinggi dengan noise rendah dan sensitivitas tinggi. Kamera baru ini mampu melakukan semua itu tetapi, di samping itu, ia melakukannya pada satu juta piksel secara bersamaan, sehingga memungkinkan kecepatan yang cukup besar dalam pengambilan dan, mungkin, dalam rekonstruksi. Pada inti piksel ini terdapat dioda avalanche foton tunggal (SPAD) yang melakukan deteksi foton, menghasilkan pulsa digital. Pulsa ini dapat dihitung atau diberi stempel waktu, sehingga memberikan penghitungan foton dan karakter resolusi waktu kamera.
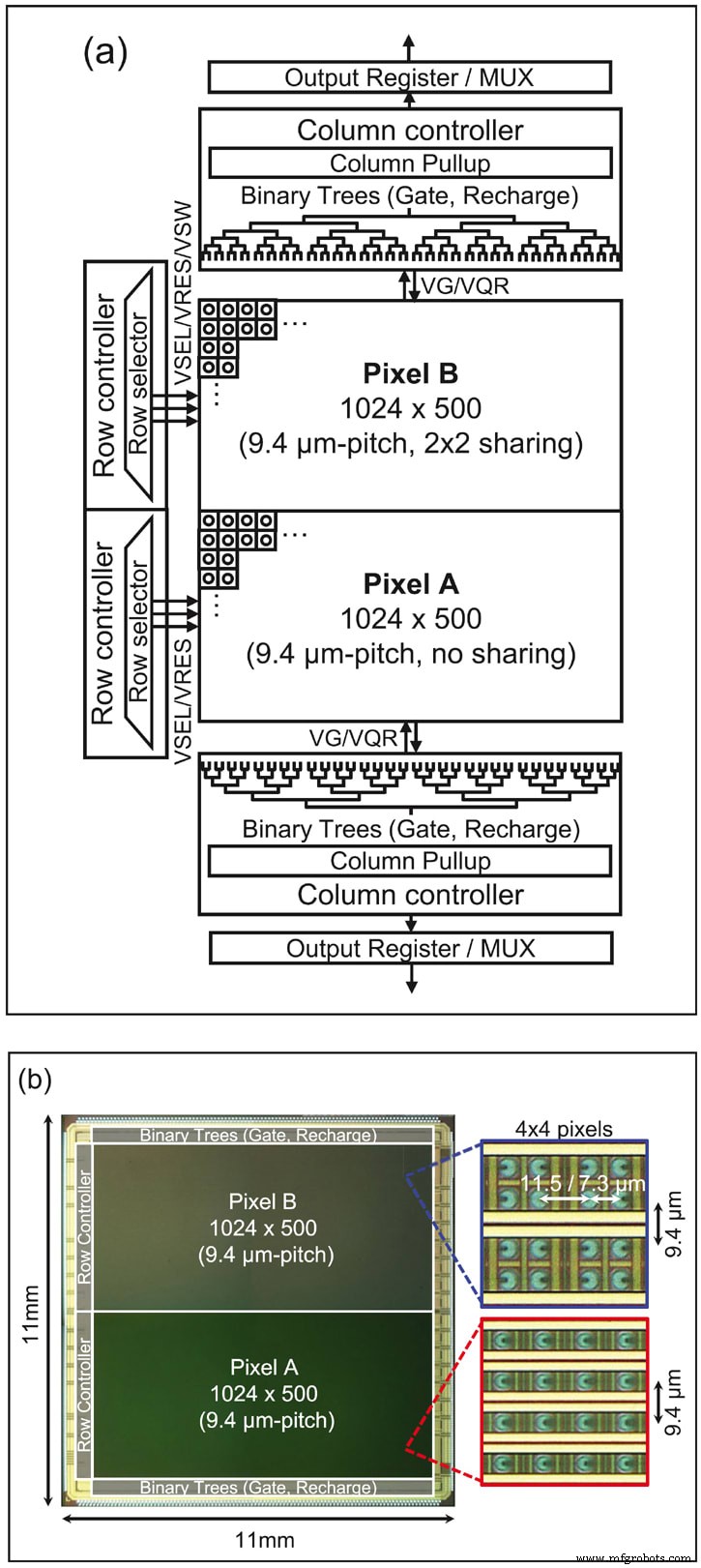
Dalam makalah yang diterbitkan dalam jurnal peer-review Optica, kami mempresentasikan kamera 1-Mpixel pertama berdasarkan piksel SPAD. Piksel memiliki pitch 9,4 m, dengan arsitektur 7T (7 transistor per piksel) atau 5,75T. Mikrograf chip kamera ditunjukkan pada Gambar 1(b). Diagram blok kamera ditunjukkan pada Gambar 1(a); ini terdiri dari pohon biner ganda untuk mengontrol rana dengan presisi sekitar 100ps dan posisi yang dapat diatur dalam langkah 36ps. Hal ini memungkinkan seseorang untuk merekonstruksi gambar 3D dengan mengukur waktu terbang dari pulsa cahaya saat meninggalkan laser dan dipantulkan oleh objek. Ini juga memungkinkan seseorang untuk menangkap cahaya dalam penerbangan, sehingga memperlihatkan efek relativistik yang menarik di laboratorium.
Chip diuji sebagai sensor gambar intensitas dengan grafik standar ( Gambar 2(a)) hingga 14-bit pada tingkat piksel. Gambar 3(a) dan (b) menunjukkan gambar 3D 2D dan kode warna yang diperoleh dengan menerangi pemandangan dengan laser 637 nm yang berdenyut pada 40 MHz dan ditangkap pada sensor gambar setengah resolusi. Jendela gerbang dengan panjang 3,8 ns digeser dari 0,6 ns menjadi 13,2 ns dengan langkah 36 ps untuk memperoleh profil intensitas foton penuh sebagai fungsi dari posisi gerbang.

Jarak LSB dalam pengukuran ini sesuai dengan 5,4 mm. Informasi kedalaman direkonstruksi dengan mendeteksi posisi tepi naik dari profil intensitas yang dihaluskan untuk setiap piksel, sesuai dengan waktu kedatangan pulsa laser yang dipantulkan. Kemiringan waktu gerbang di atas larik dikompensasikan dengan mengurangkan distribusi kemiringan waktu yang diukur secara independen dari distribusi waktu kedatangan yang diukur. Pada Gambar 3(b), warna merah menunjukkan kedekatan yang lebih tinggi dengan kamera SPAD, sedangkan warna biru menunjukkan jarak yang lebih tinggi. Rentang kedalaman maksimum untuk pengukuran ini diatur ke 2m, tetapi dapat diperpanjang hingga puluhan meter dengan menurunkan frekuensi pengulangan laser dan meningkatkan langkah gerbang.
Pitch pemindaian gerbang halus dan eksposur panjang digunakan untuk mencapai presisi kedalaman tinggi, dan waktu akuisisi data yang dihasilkan untuk pengukuran ini hanya beberapa puluh detik. Ini jauh lebih lama daripada metode rentang lainnya seperti waktu penerbangan tidak langsung, tetapi dapat dengan mudah dikurangi dengan meningkatkan pitch pemindaian gerbang, mengurangi rentang pemindaian, dan meningkatkan daya laser untuk mengurangi waktu pemaparan. Selain itu, peningkatan lebih lanjut diharapkan dengan menerapkan lensa mikro on-chip untuk meningkatkan sensitivitas.
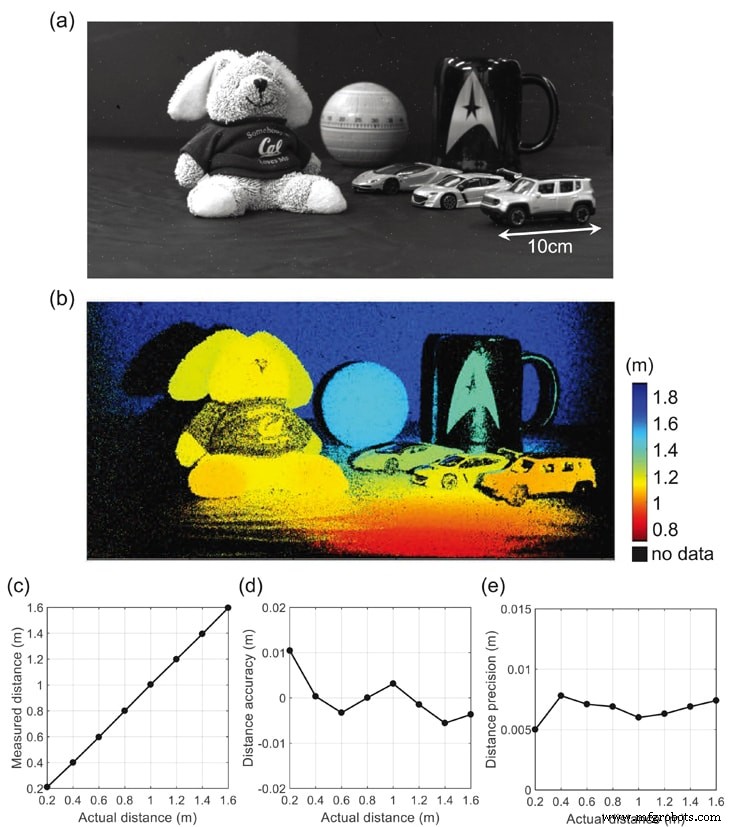
Gambar 3(c) menunjukkan jarak terukur sebagai fungsi dari jarak benda sebenarnya. Pada Gambar 3(c), (d) dan (e), benda datar yang dilapisi kertas putih (refleksi sekitar 60%) digunakan untuk mengevaluasi jarak, akurasi, dan presisi yang diukur. Pada Gambar 3(c), jarak terukur diekstraksi dengan mengambil rata-rata jarak piksel tunggal lebih dari 20x20 piksel di pusat larik. Kesepakatan yang sangat baik dengan jarak sebenarnya diamati dalam rentang terukur dari 0,2 hingga 1,6 m. Pada Gambar 3(d), akurasi jarak dihitung sebagai jarak terukur rata-rata dikurangi jarak sebenarnya. Untuk rentang jarak yang diukur, akurasi selalu lebih baik dari 1 cm. Pada Gambar 3(e), presisi jarak dieksploitasi sebagai standar deviasi jarak piksel tunggal lebih dari 20x20 piksel di tengah larik. Presisinya lebih baik dari 7,8 mm (rms) untuk semua titik terukur hingga 1,6 m.
Deteksi multi-objek telah didemonstrasikan secara eksperimental dengan mengkodekan pencahayaan temporal atau pola paparan, yang melibatkan biaya komputasi yang besar untuk memulihkan gambar 3D. Sensor time-of-flight berpagar waktu memberikan solusi alternatif yang dapat diskalakan melalui sirkuit piksel yang ringkas dan komputasi yang tidak terlalu rumit.
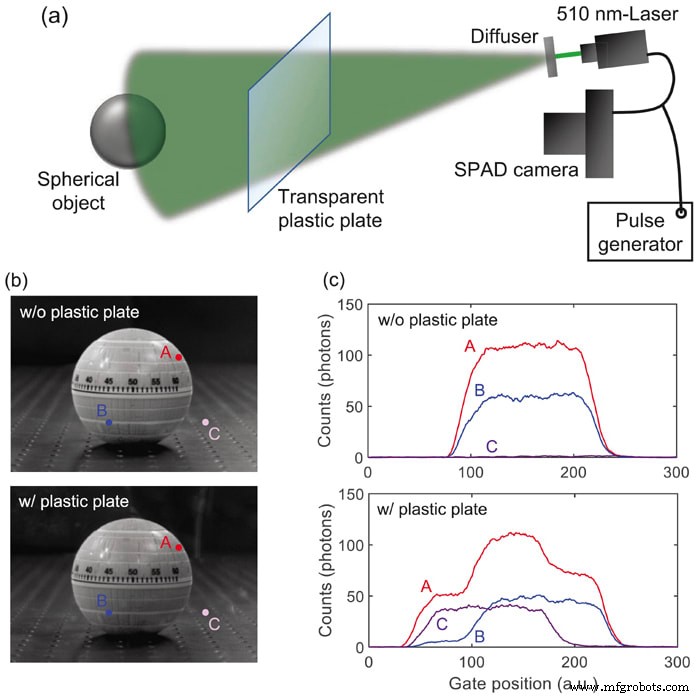
Gambar 4 (a) menunjukkan pengaturan eksperimental:sinar laser 510-nm berdenyut pada 40 MHz disebarkan oleh diffuser dan digunakan untuk menerangi target bola. Kamera SPAD disinkronkan dengan sinyal pemicu laser, dan pelat plastik transparan dimasukkan di antara kamera dan objek. Jarak dari kamera ke pelat plastik dan benda berturut-turut adalah 0,45m dan 0,75m. Gambar 4(b) menunjukkan gambar intensitas 2D di bawah pencahayaan dalam ruangan dengan dan tanpa pelat plastik dimasukkan. Karena pelat hampir transparan, tidak ada perbedaan signifikan yang terlihat pada gambar 2D untuk kedua kasus tersebut.
Profil time-gating yang diukur untuk tiga titik perwakilan (A, B dan C) diplot pada Gambar 4(c). Tanpa pelat, profil gerbang waktu untuk titik A dan B hanya menunjukkan bentuk gelombang fungsi persegi panjang tunggal yang dihaluskan dengan tepi naiknya di sekitar posisi gerbang 100 (satu langkah dari posisi yang sesuai dengan 36 ps). Untuk titik C, jumlah foton tetap mendekati nol pada rentang posisi gerbang yang diukur, yang menunjukkan tidak ada objek reflektif yang terdeteksi pada piksel ini.
Dengan pelat plastik, sebaliknya, profil pada titik A menunjukkan tepi naik dua langkah di sekitar posisi gerbang 40 dan 100. Mengingat bahwa profil jumlah foton yang diukur adalah konvolusi dari fungsi persegi tunggal yang dihaluskan dan distribusi intensitas foton yang dipantulkan, profil dua langkah adalah bukti yang meyakinkan dari refleksi ganda dari pelat plastik dan benda bulat. Perilaku serupa diamati pada titik B, di mana kemiringan tepi naik pertama di sekitar posisi gerbang 40 lebih ringan dari pada titik A. Profil pada titik C hanya menunjukkan tepi naik tunggal di sekitar posisi gerbang 40, sesuai dengan pantulan dari plastik piring. Variasi kemiringan untuk tepi naik di sekitar posisi gerbang 40 antara titik yang berbeda disebabkan oleh pantulan yang tidak seragam dari permukaan pelat plastik.
Hasilnya menunjukkan kemampuan kamera SPAD dengan gerbang waktu untuk melakukan deteksi multi-objek yang tumpang tindih secara spasial. Perhatikan bahwa skema yang diusulkan dapat diterapkan untuk mendeteksi lebih dari dua puncak refleksi. Pemindaian yang lebih baik dari jendela gerbang virtual di pascapemrosesan memungkinkan deteksi sistematis beberapa puncak. Jarak minimum yang dapat diselesaikan antara dua bahan reflektif yang berdekatan pada dasarnya dibatasi oleh waktu naik atau turun yang terbatas dari profil jendela gerbang, sesuai dengan 5-10 cm dalam sensor SPAD ini.
Sebagai kesimpulan, sensor gambar SPAD dengan gerbang waktu 1-Mpiksel telah dilaporkan untuk pertama kalinya. Dalam penelitian SPAD, pencapaian sensor SPAD megapiksel telah dianggap sebagai salah satu pencapaian terpenting selama lebih dari satu dekade. Sensor ini diterapkan pada pencitraan 2D rentang dinamis tinggi dan pencitraan 3D resolusi spatio-temporal tinggi. Sejauh pengetahuan kami, deteksi multi-objek yang tumpang tindih secara spasial dengan skema time-gating foton tunggal telah didemonstrasikan secara eksperimental untuk pertama kalinya.
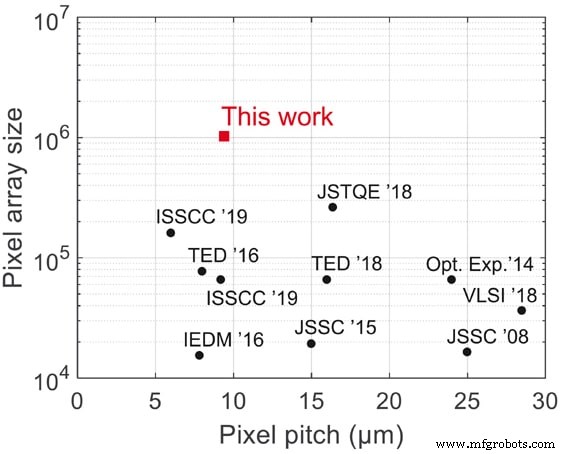
Gambar 5 menunjukkan perbandingan pitch piksel SPAD dan ukuran array yang canggih. Ukuran array sensor adalah yang terbesar, hampir 4 kali lebih tinggi daripada sensor tercanggih, sedangkan pitch piksel adalah salah satu yang terkecil. Karena kemampuan pencitraan 2D dan 3D resolusi tinggi, sensor yang diusulkan akan berguna dalam berbagai aplikasi industri seperti keamanan, otomotif, robot, biomedis, dan aplikasi ilmiah, termasuk pencitraan kuantum dan pencitraan berkecepatan sangat tinggi.
Baca laporan lengkap tentang teknologi dari jurnal ilmiah Optica .
Artikel ini ditulis oleh Edoardo Charbon, Profesor, EPFL Swiss (Lausanne, Swiss). Untuk informasi lebih lanjut, kunjungi di sini .


