Tentang proyek ini
MOTIVASI:
Di Mana Botol Air Plastik Berakhir?
Di tempat pembuangan sampah, mengambang di lautan, atau sungai dan di trotoar. Diperkirakan bahwa 46.000 keping sampah plastik mengambang di laut per mil persegi. Plastik ini membunuh hewan, membocorkan bahan kimia, dan mengganggu ekosistem. Setiap botol dapat memakan waktu hingga seribu tahun untuk terurai, membocorkan bahan kimia berbahaya dan berbahaya selama proses tersebut. Beberapa racun yang bocor dapat menyebabkan kanker dan cacat reproduksi. Pembakaran plastik menghasilkan emisi beracun seperti karbon monoksida, klorin, asam hidroklorida, bulu, dan nitrit. Sayangnya, argumen daur ulang hanya dapat berbuat sedikit untuk kasusnya karena hanya 12% dari tiga puluh lima miliar botol yang digunakan dalam satu tahun yang didaur ulang, menunjukkan bahwa hanya setengah dari apa yang Anda tempatkan di tempat sampah yang benar-benar didaur ulang.
IDE:
Mesin pintar untuk pembuangan sampah plastik dan logam adalah sistem yang menerima sampah plastik (botol) dan kaleng logam untuk didaur ulang dan sebagai gantinya membagikan pint di dompet kepada operator yang mendaur ulang sampah. Mesin reverse vending dilengkapi dengan sensor jarak untuk membedakan antara berbagai jenis botol dan poin diperoleh ketika pengguna memasukkan kode di situs web. Penemuan ini secara umum berkaitan dengan pengelolaan sampah dan daur ulang sampah plastik dan logam (botol) di lingkungan. Pembuangan sampah plastik di lingkungan dan kurangnya keinginan untuk mendaur ulang plastik menghadirkan masalah yang berkelanjutan bagi lingkungan dan semua makhluk hidup.
BEKERJA:
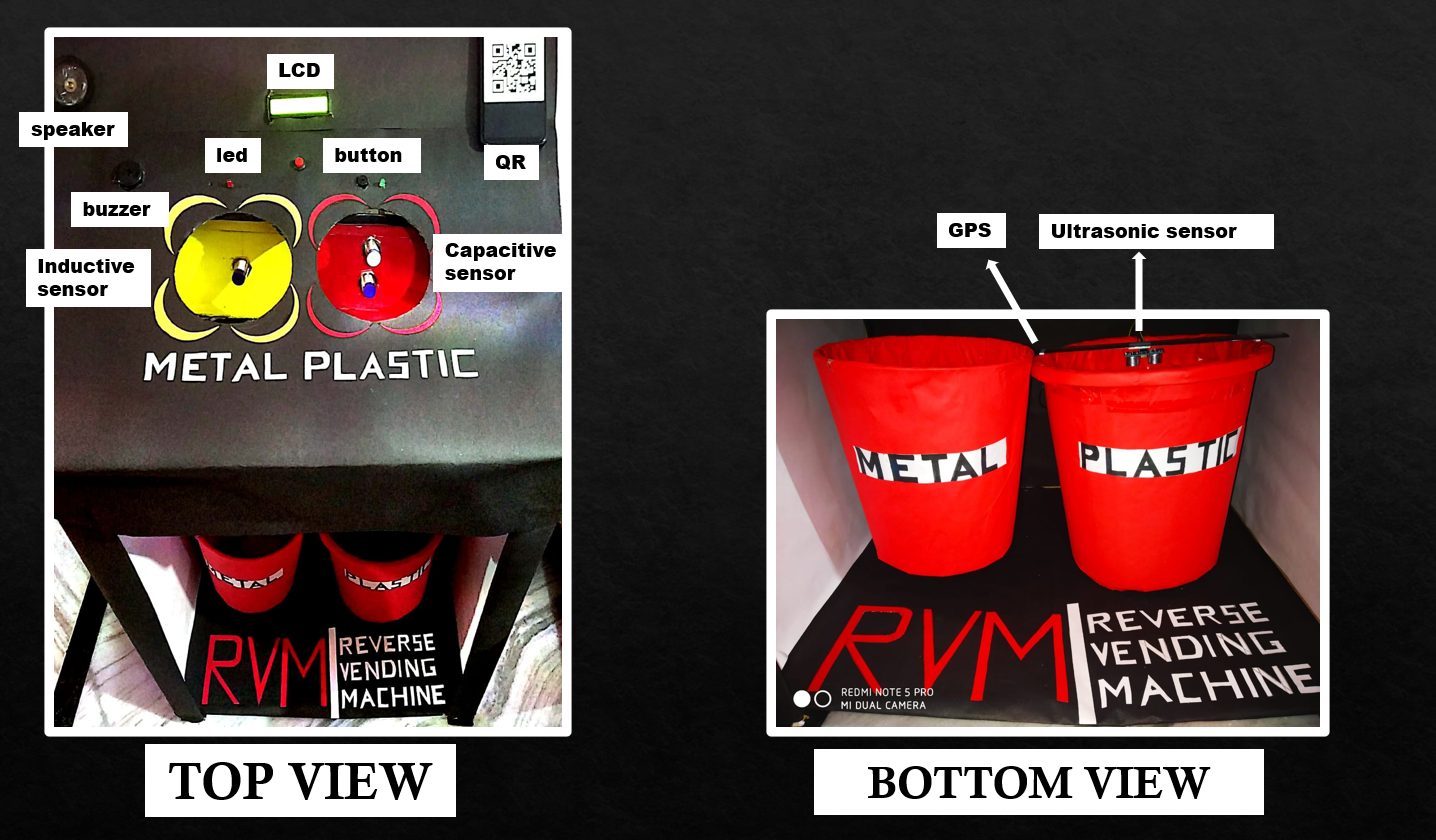
Reverse Vending Machine adalah perangkat yang menerima wadah minuman bekas dan mengembalikan uang kepada pengguna (kebalikan dari siklus penjual otomatis). Mesin ini populer di tempat-tempat yang memiliki undang-undang daur ulang wajib atau undang-undang penyimpanan kontainer.
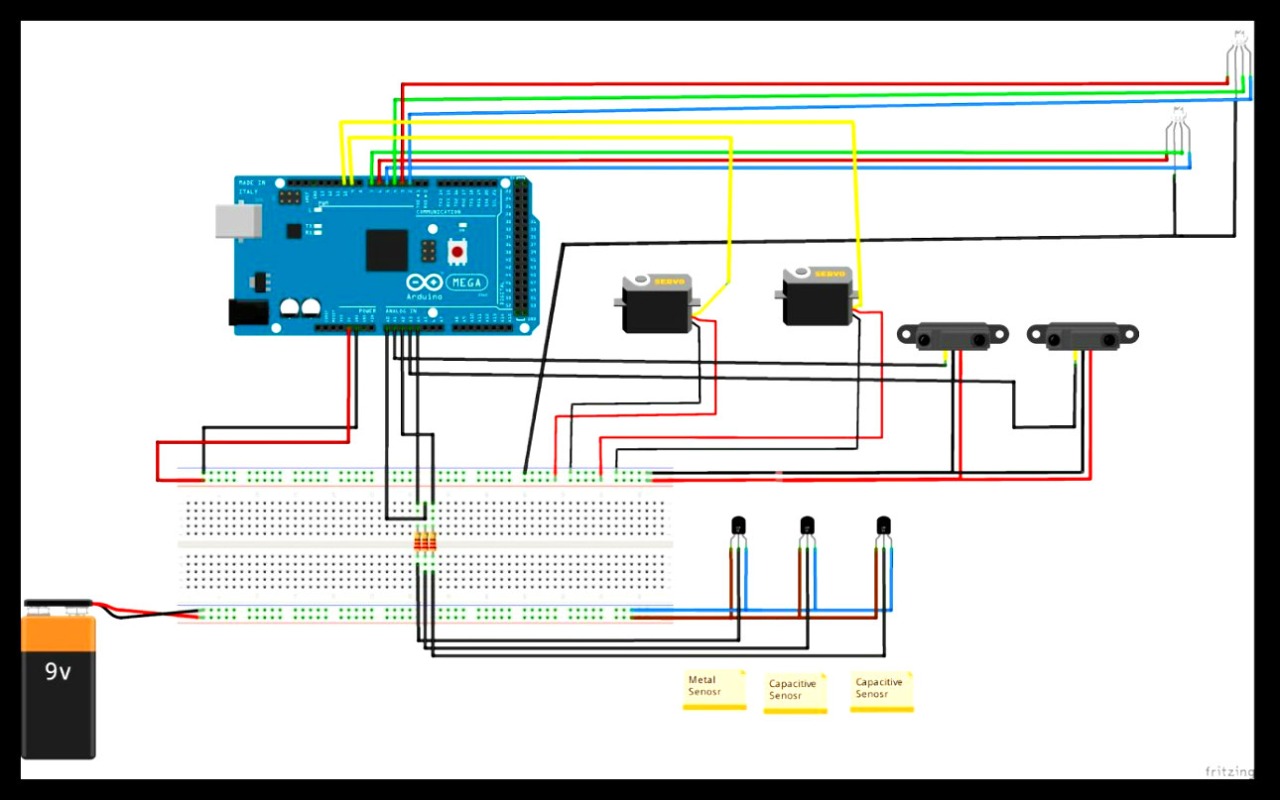
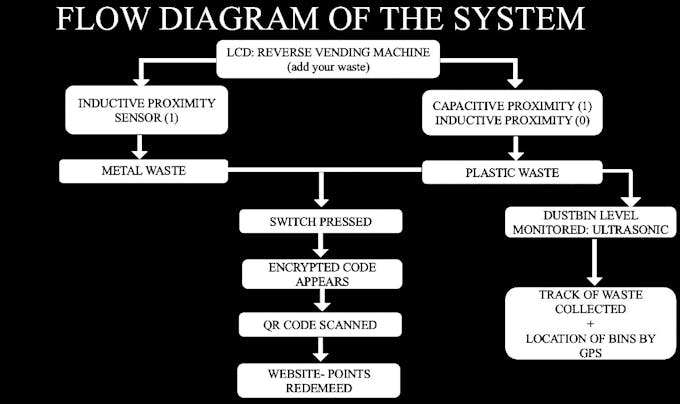
Operasi dasar melibatkan langkah-langkah di mana pendaur ulang menempatkan botol/kaleng kosong ke dalam lubang penerima; sistem in-feed horizontal memungkinkan pengguna memasukkan kontainer satu per satu. Botol/kaleng kemudian secara otomatis dipindai dengan bantuan sensor jarak kapasitif dan induktif. Jika nilai sensor dari sensor induktif adalah 1 maka benda tersebut adalah plastik dan jika nilai sensor dari sensor induktif adalah 0 dan nilai sensor kapasitif adalah 1 maka benda tersebut adalah plastik.
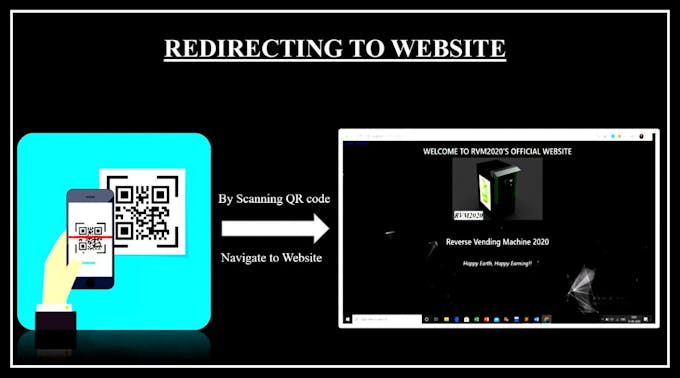
Adapun sistem penghargaan, RVM mendistribusikan token berharga, seperti koin atau kupon, ketika wadah minuman didaur ulang. Kupon tersebut kemudian digunakan untuk menebus hadiah di konter. Namun, kesadaran akan isu lingkungan dan tujuan mengurangi penggunaan kertas, pencetakan kupon tidak terlalu diunggulkan. Jadi, dalam sistem yang kami usulkan saat plastik terdeteksi, kode terenkripsi muncul di layar LCD. Kemudian pengguna harus memindai kode ATAU yang ada di mesin untuk menavigasi ke situs web untuk menukarkan poinnya dengan memasukkan kode yang didapatnya di layar LCD.
Ada database untuk pengguna yang memiliki akun di situs web mesin penjual otomatis plastik terbalik. Wajib memiliki akun untuk login di situs web untuk menukarkan poin dengan membuang plastik.
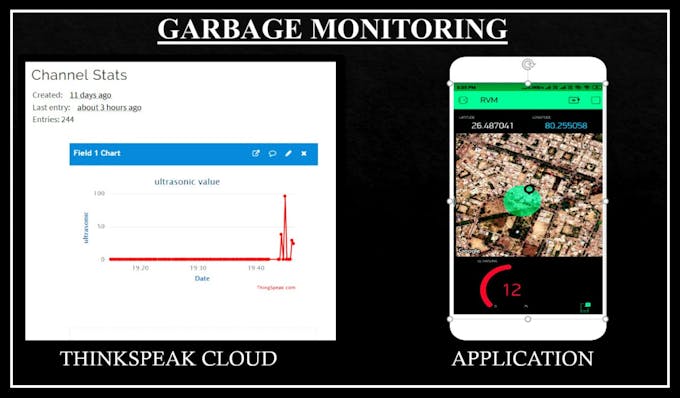
Mesin memiliki satu fitur lagi, jika mesin penuh maka pengumpul sampah atau vendor daur ulang dan diberitahu dengan bantuan aplikasi. Tingkat mesin dimonitor menggunakan sensor ultrasonik dan NodeMCU karena mesin penuh, kolektor diinformasikan dan lokasi mesin yang tepat dikirim dengan bantuan sistem penentuan posisi global.
Kode
- Pemilahan Sampah
- Pemantauan tingkat tempat sampah
Pemilahan SampahC/C++
#include //#include "Arduino.h"//#include "Button.h"#include LiquidCrystal lcd(1,2,4,5,6,7);const int knapp =3;int ButtonState =0; // status tombol saat ini oldButtonState =0;const int ledPin1 =10; const int ledPin2 =11; const int buzz1 =12; const int buzz2 =13; const int plasticsensor=A0;int metalsensor=A1;int metalsensor_M=A2;Servo myservo;Servo myservo_M;int pos =90;int pos_M =360;void setup() { pinMode(knapp, INPUT); digitalWrite(knapp, RENDAH); lcd.begin(16,2);lcd.clear(); myservo.attach(9); myservo_M.attach(8); pinMode(sensor plastik,INPUT_PULLUP); pinMode(metalsensor,INPUT_PULLUP); pinMode(metalsensor_M,INPUT_PULLUP); pinMode(ledPin1, OUTPUT); pinMode(ledPin2, OUTPUT); pinMode(buzz1, OUTPUT); pinMode(buzz2, OUTPUT); Serial.begin(9600);} void loop() { lcd.setCursor(0,0); lcd.print("MASUKKAN LOGAM PADA"); lcd.setCursor(0,1); lcd.print("SISI KANAN"); penundaan (6000); lcd.clear(); int sensor_read=digitalRead(plasticsensor); Serial.println("sensor plastik"); Serial.println(sensor_read); //tunda (10); int sensor_read_m=digitalRead(metalsensor); //Tempat sampah plastik Serial.println("sensor logam1"); Serial.println(sensor_read_m); //tunda (10); int sensor_read_mm=digitalRead(metalsensor_M); Serial.println(sensor_read_mm); //tunda (10); if((sensor_read==1)&&(sensor_read_m!=1)){ for (pos =90; pos <=240; pos +=1) { // berubah dari 0 derajat ke 180 derajat // dalam langkah 1 derajat myservo.write(pos); // suruh servo ke posisi di variabel 'pos' //delay(5); digitalWrite(ledPin1, TINGGI); digitalWrite(buzz1, TINGGI); // menunggu 15 ms sampai servo mencapai posisi } //delay(5000); for (pos =240; pos>=90; pos -=1) { // berubah dari 0 derajat ke 180 derajat // dalam langkah 1 derajat myservo.write(pos); //tunda(5); } } else { // berubah dari 180 derajat ke 0 derajat myservo.write(pos); digitalWrite(ledPin1, RENDAH); digitalWrite(buzz1, RENDAH); } if((sensor_read_mm==1)&&(sensor_read==0)){ for (pos_M =360; pos_M>=50; pos_M -=1) { // berubah dari 0 derajat ke 180 derajat // dalam langkah 1 derajat myservo_M.write(pos_M); //tunda(5); digitalWrite(ledPin2, TINGGI); digitalWrite(buzz2, TINGGI); } // suruh servo ke posisi di variabel 'pos' // delay(5000); for (pos_M =50; pos_M <=360; pos_M +=1) { // berubah dari 180 derajat ke 0 derajat myservo_M.write(pos_M); // beri tahu servo untuk pindah ke posisi dalam variabel 'pos' //delay(5);// menunggu 15 md agar servo mencapai posisi } } else{ myservo_M.write(pos_M); digitalWrite(ledPin2, RENDAH); digitalWrite(buzz2, RENDAH); } }
Pemantauan tingkat tempat sampahC/C++
#include "ThingSpeak.h"#include #include #include #include #define BLYNK_PRINT Serial #define TRIGGER2 5#define ECHO2 WiFi klien;konstanta statis int RXPin =4, TXPin =5; // GPIO 4=D2(menghubungkan Tx dari GPS) dan GPIO 5=D1(Menghubungkan Rx dari GPSstatic const uint32_t GPSBaud =9600;//jika Baud rate 9600 tidak berfungsi dalam kasus Anda, gunakan 4800unsigned long myChannelField =1067056; / / Channel IDconst int ChannelField =1; // Saluran mana untuk menulis dataconst char * myWriteAPIKey ="FMV95MD2A1J7Y8SP"; // Tulis ATinyGPSPlus gps Anda; // The TinyGPS++ objectWidgetMap myMap(V0); // V0 untuk pin virtual Map WidgetSoftwareSerial s (RXPin, TXPin); // Koneksi serial ke perangkat GPS TimerBlynkTimer;// Anda harus mendapatkan Token Auth di Aplikasi Blynk.char auth[] ="YVvgHBx9fIM1-yR_2XrGXXkKdIuEmrYL";// Kredensial WiFi Anda.// Setel kata sandi to "" untuk open networks.char ssid[] ="diksha";char pass[] ="diksha19";unsigned int move_index =1;void setup() { Serial.begin (115200); ss.begin(GPSBaud); Blynk.begin(auth, ssid, pass);// timer.setInterval(5000L, checkGPS); pinMode(TRIGGER2, OUTPUT); pinMode(ECHO2, INPUT); pinMode(BUILTIN_LED, OUTPUT); WiFi.mode(WIFI_STA); Bicaralah. begin(client);}/*void checkGPS(){ if (gps.charsProcessed() <10) { Serial.println(F("Tidak ada GPS yang terdeteksi:periksa kabel.")); }}*/void loop() { if (WiFi.status() !=WL_CONNECTED) { Serial.print("Mencoba menyambung ke SSID:"); Serial.println(ssid); while (WiFi.status() !=WL_CONNECTED) { WiFi.begin(ssid, pass); Serial.print("."); penundaan(100); } Serial.println("\nTersambung."); } while (ss.available()> 0) { // sketch menampilkan informasi setiap kali kalimat baru di-encode dengan benar. if (gps.encode(ss.read())) Serial.println("GPS Terhubung");//displayInfo(); { if (gps.location.isValid() ) { float latitude =(gps.location.lat()); //Menyimpan Lat. dan Lon. float bujur =(gps.location.lng()); Serial.print("LAT:"); Serial.println(lintang, 6); // float ke x tempat desimal Serial.print("LONG:"); Serial.println(bujur, 6); ThingSpeak.setField(3, garis lintang); ThingSpeak.setField(4, bujur); ThingSpeak.writeFields(myChannelField, myWriteAPIKey); Blynk.virtualWrite(V1, String(lintang, 6)); Blynk.virtualWrite(V2, String(bujur, 6)); myMap.location(move_index, lintang, bujur, "GPS_Location"); } } } //durasi panjang1, jarak1; durasi panjang2, jarak2; digitalWrite(TRIGGER2, RENDAH); delayMicroseconds(2); digitalWrite(TRIGGER2, TINGGI); delayMicroseconds(10); digitalWrite(TRIGGER2, RENDAH); durasi2 =pulseIn(ECHO2, TINGGI); jarak2 =(durasi2/2) / 29.1; if (distance2 <=5) { Blynk.notify("Tolong!! kosongkan tempat sampah");} Serial.println("2 Ultrasonic Centimeter:"); Serial.println(jarak2); Blynk.virtualWrite(V6, jarak2); ThingSpeak.writeField(myChannelField, ChannelField, distance2, myWriteAPIKey); penundaan(100); Blynk.run(); timer.run();}
Skema