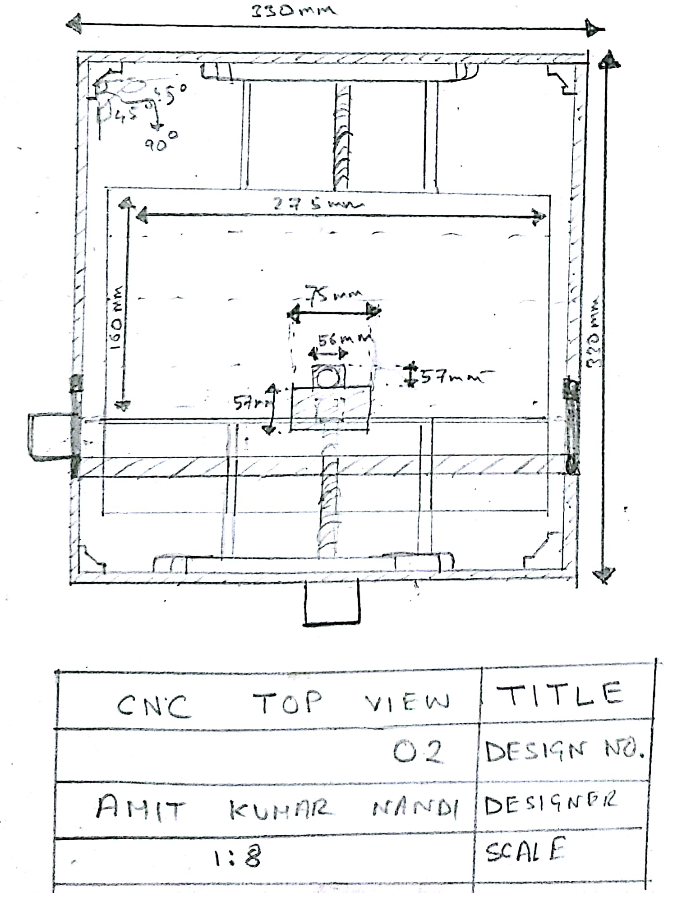
Model prototipe kami berbasis IoT sehingga memberikan arsitektur yang dapat diskalakan untuk menggunakannya dari mana saja dengan koneksi internet. Ini adalah CNC 350mm x 350mm dengan area kerja 250mm x 240mm, berjalan pada perangkat lunak kontrol gerak sumber terbuka (GRBL). Bahkan perangkat keras kami juga sebagian besar open source dan dengan demikian terjadi pemotongan biaya yang besar. Mesin ini seluruhnya dibuat dari barang-barang yang dibeli secara lokal dan dapat dikerjakan pada kayu, plastik, karet keras, resin keras, dll. Target utama kami adalah pembuatan PCB berbiaya rendah.
Prospek keinginan akan kayu juga ada.
Kami berencana untuk menambahkan dukungan pemesinan laser juga sebagai bagian dari proyek kami di masa mendatang.
Karena sistem saat ini dapat dikontrol dari Intranet lokal secara nirkabel, kami ingin menskalakannya lebih lanjut untuk membuat aplikasi web model terdistribusi untuk membuat dan menghubungkan ekosistem beberapa perangkat jenis ini.
Kemungkinannya tidak terbatas dengan mesin kami.
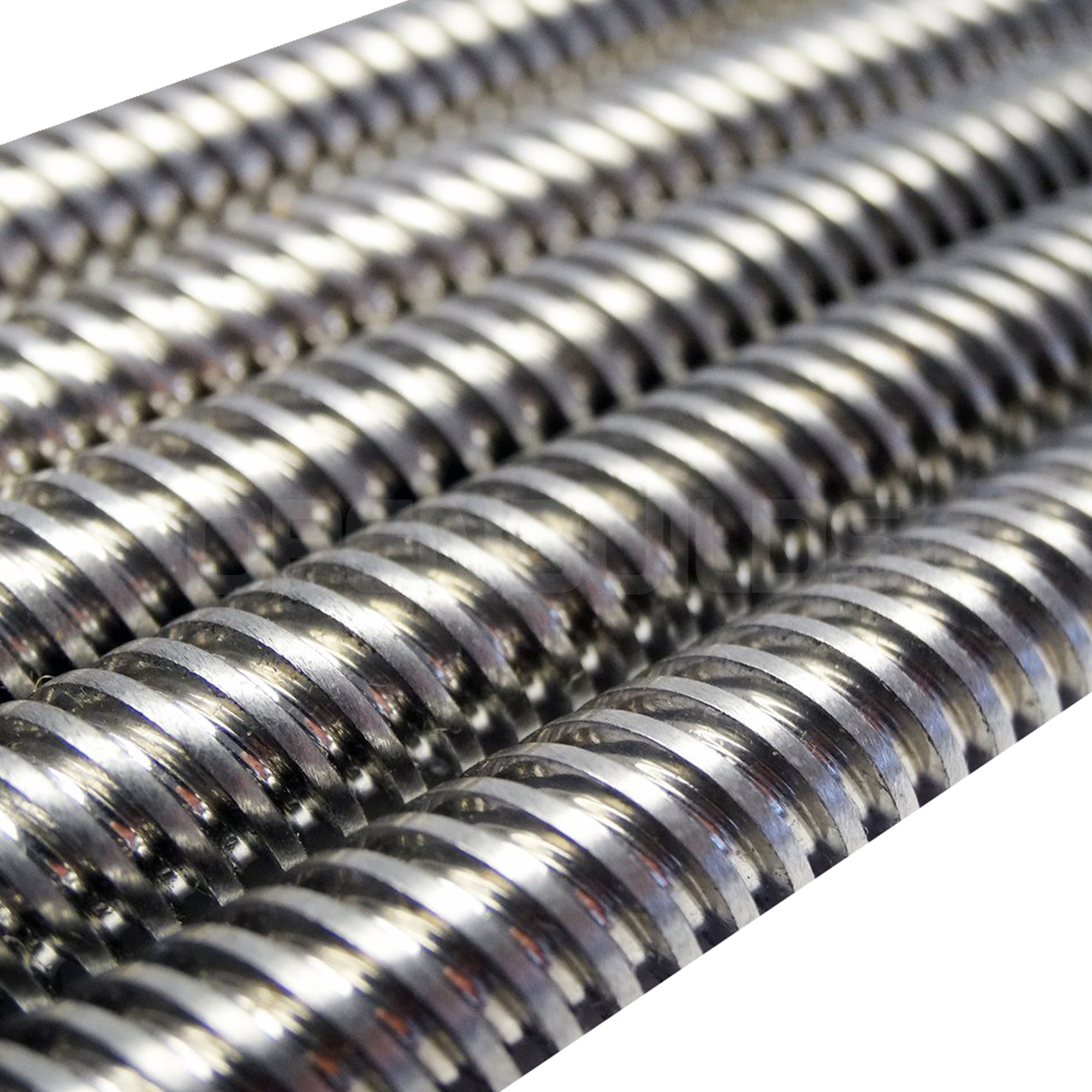
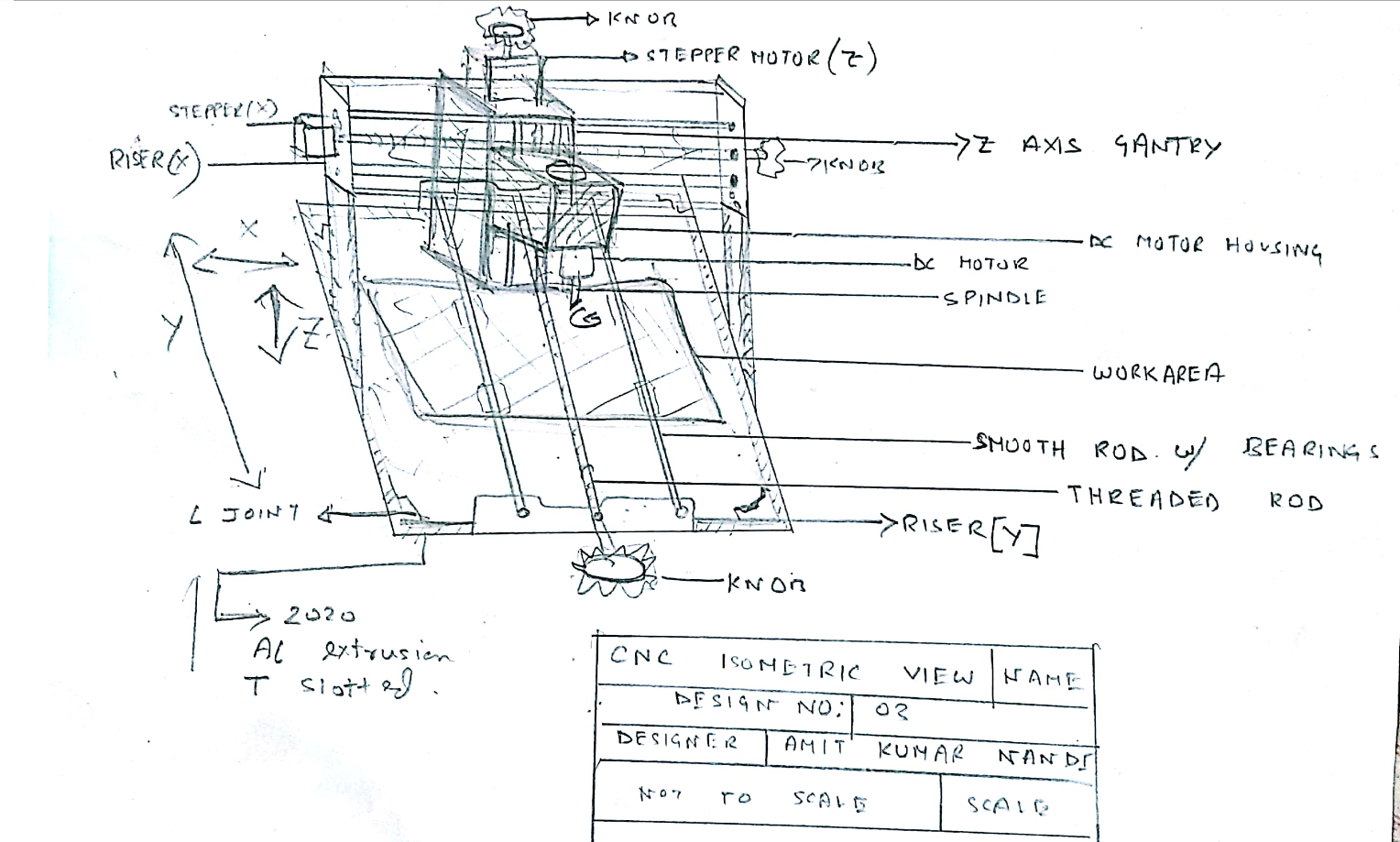
Model prototipe kami memiliki rangka dasarnya yang terbuat dari ekstrusi aluminium slot-T 2020 dan sambungan L. Mesin ini memberikan daya sekitar 80-85 Watt dengan spindel yang dikontrol DC 2000 rpm. Ini memiliki sekrup timah dan skema gerakan batang berulir dengan batang halus pemandu yang memiliki bantalan bola snap fit alur radial untuk pengoperasian yang mulus di sepanjang 3 sumbu.
Lead pitch minimum adalah 0.8mm/revolusi dengan 2000 langkah/revolusi kami memiliki resolusi 1600 untuk semua sumbu. Ukuran mesin kasar kami sekitar 430x430x330mm dan area kerja sekitar 270x170x65mm dengan akurasi posisi 0,04mm. Gantry sumbu Z kami dicetak 3D dari awal dengan batang pemandu ganda.
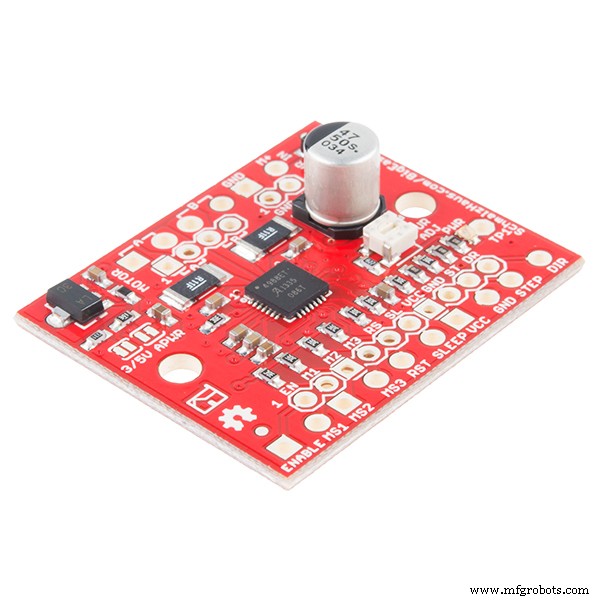
Sumbu Z bergerak 4,8 cm dengan bit spindel terpasang. Kami menggunakan alat pemotong 45° V-bit untuk keperluan pengukiran PCB, alat ini juga mendukung bit end mill 0,2 mm hingga 1,8 mm. Kami menggunakan motor NEMA 23 Stepper dengan arus maksimum 3A untuk setiap penggerak utama sumbu. Motor digerakkan oleh driver 2.5A A4988 dengan resolusi micro-stepping maksimum 1/16 yang memberikan kami presisi pemesinan terbaik dengan biaya yang sangat ekonomis.
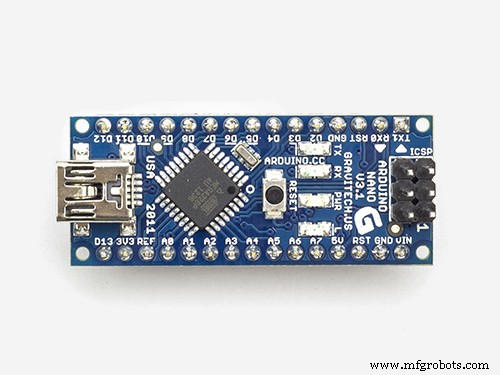
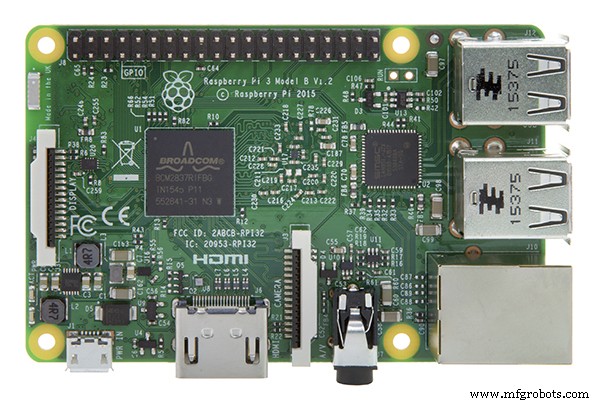
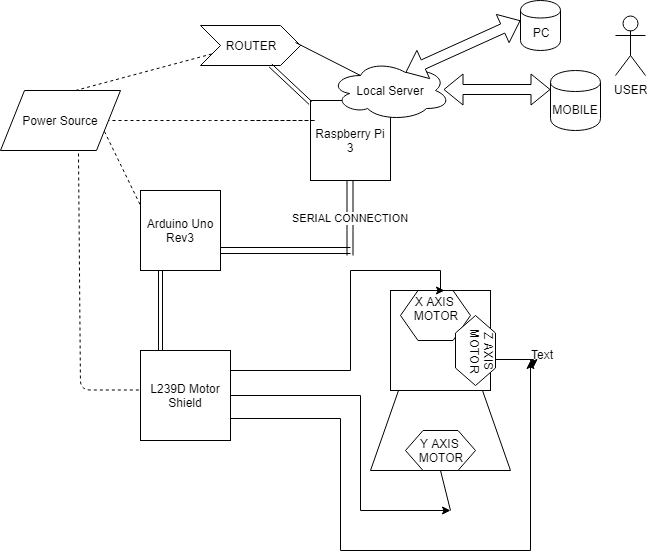
Untuk bagian IoT, kami telah memungkinkan untuk mengontrol router CNC dari tampilan tanpa kepala seperti layar ponsel / tablet (bertindak sebagai HMI kami di sini) dari mana saja dengan koneksi Internet. Kami menggunakan Raspberry Pi dan pengaturan router (keamanan) yang terhubung ke internet dan menjalankan server web untuk menyediakan antarmuka untuk mengontrol CNC kami secara nirkabel. Kami juga berencana untuk mendapatkan wawasan bagian alat berat yang berharga seperti torsi motor waktu nyata, penarikan arus, getaran, kebisingan, dll. dan menggambar wawasan waktu nyata dalam platform web untuk kolaborasi yang lebih baik. Yang mungkin disebut di sektor manufaktur sebagai IoT Industri (INDUSTRI 4.0) .
Kode
- Contoh Gcode
- Kode Langkah
- Perpustakaan
- Perpustakaan
Contoh GcodeVHDL
(Versi coretan C:\Users\ABDERR~1\AppData\Local\Temp\ink_ext_XXXXXX.svgISF45X @ 3000.00)( unicorn.py --tab="plotter_setup" --pen-up-angle=50 -- pen-down-angle=30 --start-delay=160 --stop-delay=150 --xy-feedrate=3000 --z-feedrate=150 --z-height=0 --finished-height=0 - -register-pen=true --x-home=0 --y-home=0 --num-copies=1 --continuous=false --pause-on-layer-change=true C:\Users\ABDERR~ 1\AppData\Local\Temp\ink_ext_XXXXXX.svgISF45X )G21 (metrik ftw)G90 (mode absolut)G92 X0,00 Y0,00 Z0,00 (Anda di sini)M300 S30 (pena turun)G4 P160 (tunggu 160ms)M300 S50 (pen up)G4 P150 (menunggu 150ms)M18 (melepaskan drive)M01 (Apakah tes pendaftaran berhasil?)M17 (menghubungkan drive jika YA, dan melanjutkan)M01 (Plotting layer 'Calque 1')(Polyline terdiri dari 29 segmen. )G1 X16.85 Y4.97 F3000.00M300 S30.00 (pena turun)G4 P160 (tunggu 160ms)G1 X14.07 Y5.98 F3000.00G1 X13.33 Y6.40 F3000.00G1 X10.74 Y6.40 F3000 .00G1 X8.14 Y6.49 F3000.00G1 X10.60 Y6.58 F3000.00G1 X13.07 Y6.64 F3000.00G1 X12.75 Y6.98 F3000.00G1 X11. 99 Y8.33 F3000.00G1 X12.30 Y9.13 F3000.00G1 X12.98 Y9.85 F3000.00G1 X14.73 Y10.48 F3000.00G1 X16.42 Y10.34 F3000.00G1 X16.89 Y10.16 F3000 .00G1 X17.20 Y10.44 F3000.00G1 X17.44 Y10.92 F3000.00G1 X15.95 Y12.12 F3000.00G1 X14.52 Y13.21 F3000.00G1 X14.17 Y14.50 F3000.00G1 X14.18 Y14.85 F3000.00G1 X13.90 Y14.95 F3000.00G1 X13.30 Y15.34 F3000.00G1 X13.02 Y16.08 F3000.00G1 X13.23 Y16.62 F3000.00G1 X14.03 Y16.94 F3000. 00G1 X14.80 Y16.89 F3000.00G1 X15.21 Y16.80 F3000.00G1 X15.35 Y17.02 F3000.00G1 X15.71 Y17.77 F3000.00G1 X16.05 Y18.61 F3000.00G1 X15.77 Y19 .35 F3000.00G1 X15.47 Y20.24 F3000.00G1 X15.20 Y20.73 F3000.00G1 X13.98 Y20.91 F3000.00G1 X12.47 Y21.26 F3000.00G1 X11.32 Y21.88 F3000.00G1 X10.23 Y23.00 F3000.00G1 X9.82 Y24.17 F3000.00G1 X9.94 Y24.90 F3000.00G1 X10.41 Y25.47 F3000.00G1 X10.77 Y25.78 F3000.00G1 X10.53 Y26. 37 F3000.00G1 X10.04 Y28.07 F3000.00G1 X10.02 Y29.68 F3000.00G1 X10.50 Y31.25 F3000.00G1 X11.46 Y32.80 F3000.00G1 X13.34 Y34.54 F3000.00G1 X15 .75 Y36.02 F3000.00G1 X16.94 Y3 6.57 F3000.00G1 X11.31 Y36.60 F3000.00G1 X5.53 Y36.58 F3000.00G1 X5.38 Y21.60 F3000.00G1 X5.41 Y8.55 F3000.00G1 X5.62 Y6.61 F3000.00G1 X5 .85 Y6.48 F3000.00G1 X5.50 Y6.40 F3000.00G1 X5.14 Y6.40 F3000.00G1 X5.14 Y21.60 F3000.00G1 X5.14 Y36.80 F3000.00G1 X11.39 Y36.80 F3000.00G1 X17.65 Y36.80 F3000.00G1 X18.65 Y37.07 F3000.00G1 X21.13 Y37.54 F3000.00G1 X23.70 Y37.69 F3000.00G1 X26.12 Y37.52 F3000.00G1 X28. 11 Y37.03 F3000.00G1 X28.70 Y36.80 F3000.00G1 X33.01 Y36.80 F3000.00G1 X37.32 Y36.80 F3000.00G1 X37.32 Y21.60 F3000.00G1 X37.32 Y6.40 F3000 .00G1 X32.21 Y6.40 F3000.00G1 X26.73 Y6.25 F3000.00G1 X22.57 Y5.07 F3000.00G1 X16.85 Y4.97 F3000.00G1 X16.85 Y4.97 F3000.00M300 S50.00 (pen up)G4 P150 (menunggu 150ms)(Polyline terdiri dari 29 segmen.)G1 X20.57 Y5.03 F3000.00M300 S30.00 (pen down)G4 P160 (menunggu 160ms)G1 X23.06 Y5.34 F3000. 00G1 X24.86 Y5.94 F3000.00G1 X25.99 Y6.82 F3000.00G1 X26.48 Y8.01 F3000.00G1 X26.11 Y9.51 F3000.00G1 X24.89 Y10.76 F3000.00G1 X23.73 Y11 .07 F3000.00G1 X22.18 Y10.75 F3 000.00G1 X20.76 Y10.29 F3000.00G1 X20.13 Y9.96 F3000.00G1 X19.83 Y9.40 F3000.00G1 X19.66 Y9.17 F3000.00G1 X19.74 Y9.72 F3000.00G1 X20.51 Y10.61 F3000.00G1 X21.41 Y11.91 F3000.00G1 X21.31 Y12.42 F3000.00G1 X20.85 Y12.91 F3000.00G1 X19.04 Y13.73 F3000.00G1 X18.83 Y13.81 F3000. 00G1 X19.56 Y13.72 F3000.00G1 X20.90 Y13.07 F3000.00G1 X21.48 Y12.71 F3000.00G1 X21.88 Y12.90 F3000.00G1 X23.87 Y14.56 F3000.00G1 X24.34 Y15 .23 F3000.00G1 X23.85 Y15.22 F3000.00G1 X19.04 Y15.20 F3000.00G1 X16.99 Y15.70 F3000.00G1 X15.62 Y16.42 F3000.00G1 X15.31 Y16.66 F3000.00G1 X14.86 Y15.95 F3000.00G1 X14.39 Y14.29 F3000.00G1 X14.89 Y12.97 F3000.00G1 X16.02 Y12.25 F3000.00G1 X17.19 Y11.48 F3000.00G1 X17.63 Y10. 79 F3000.00G1 X16.90 Y10.01 F3000.00G1 X16.07 Y9.45 F3000.00G1 X16.23 Y9.73 F3000.00G1 X16.50 Y10.15 F3000.00G1 X14.70 Y10.34 F3000.00G1 X13 .17 Y9.72 F3000.00G1 X12.44 Y9.03 F3000.00G1 X12.23 Y8.30 F3000.00G1 X12.53 Y7.53 F3000.00G1 X13.34 Y6.71 F3000.00G1 X15.72 Y5.44 F3000.00G1 X18.83 Y4.95 F3000.00G1 X20. 57 Y5.03 F3000.00G1 X20.57 Y5.03 F3000.00M300 S50.00 (pen up)G4 P150 (tunggu 150ms)(Polyline terdiri dari 29 segmen.)G1 X27.30 Y6.65 F3000.00M300 S30.00 (pena bawah)G4 P160 (tunggu 160ms)G1 X29.25 Y7.52 F3000.00G1 X30.16 Y8.34 F3000.00G1 X30.46 Y9.06 F3000.00G1 X30.29 Y9.88 F3000.00G1 X29.49 Y10.84 F3000.00G1 X28.16 Y11.51 F3000.00G1 X26.25 Y11.62 F3000.00G1 X25.07 Y10.96 F3000.00G1 X25.51 Y10.50 F3000.00G1 X26.26 Y9.62 F3000. 00G1 X26.58 Y8.19 F3000.00G1 X26.44 Y7.12 F3000.00G1 X25.77 Y6.34 F3000.00G1 X25.47 Y6.07 F3000.00G1 X25.68 Y6.08 F3000.00G1 X27.30 Y6 .65 F3000.00G1 X27.30 Y6.65 F3000.00M300 S50.00 (pen up)G4 P150 (tunggu 150ms)(Polyline terdiri dari 29 segmen.)G1 X37.06 Y21.42 F3000.00M300 S30.00 (pena bawah)G4 P160 (tunggu 160ms)G1 X37.02 Y36.41 F3000.00G1 X36.96 Y36.62 F3000.00G1 X33.06 Y36.62 F3000.00G1 X29.16 Y36.58 F3000.00G1 X29.47 Y36. 10 F3000.00G1 X29.73 Y35.05 F3000.00G1 X29.34 Y34.00 F3000.00G1 X28.36 Y33.19 F3000.00G1 X26.78 Y32.58 F3000.00G1 X24.56 Y32.18 F3000.00G1 X24 .11 Y32.04 F3000.00G1 X24.44 Y31.73 F3000.00G1 X25.27 Y31.55 F3000.00G1 X28.11 Y31.00 F3000.00G1 X28.91 Y30.55 F3000.00G1 X29.29 Y29.72 F3000. 00G1 X29.84 Y28.76 F3000.00G1 X30.44 Y28.08 F3000.00G1 X30.69 Y27.27 F3000.00G1 X30.58 Y26.46 F3000.00G1 X30.11 Y25.77 F3000.00G1 X29.82 Y25 .45 F3000.00G1 X29.90 Y25.05 F3000.00G1 X29.83 Y24.22 F3000.00G1 X28.51 Y23.12 F3000.00G1 X26.38 Y22.66 F3000.00G1 X25.09 Y22.48 F3000.00G1 X24.68 Y22.25 F3000.00G1 X24.95 Y22.15 F3000.00G1 X26.03 Y21.82 F3000.00G1 X27.25 Y21.07 F3000.00G1 X27.59 Y20.36 F3000.00G1 X27.42 Y19. 68 F3000.00G1 X26.21 Y18.82 F3000.00G1 X24.70 Y18.51 F3000.00G1 X24.39 Y18.50 F3000.00G1 X24.42 Y18.22 F3000.00G1 X24.59 Y16.70 F3000.00G1 X24 .63 Y15.61 F3000.00G1 X24.39 Y15.01 F3000.00G1 X23.81 Y14.22 F3000.00G1 X23.52 Y13.85 F3000.00G1 X24.03 Y13.49 F3000.00G1 X24.69 Y12.99 F3000.00G1 X24.78 Y12.31 F3000.00G1 X24.54 Y11.48 F3000.00G1 X24.58 Y11.08 F3000.00G1 X25.21 Y11.31 F3000.00G1 X26.08 Y11.74 F3000.00G1 X27. 14 Y11.85 F3000.00G1 X28.29 Y11.66 F3000.00G1 X29.41 Y11.16 F3000.00G1 X30.24 Y10.39 F3000.00G1 X30.57 Y9.37 F3000.00G1 X30.36 Y8.29 F3000.00G1 X29.62 Y7.56 F3000. 00G1 X28.50 Y6.94 F3000.00G1 X27.96 Y6.65 F3000.00G1 X32.49 Y6.61 F3000.00G1 X37.02 Y6.63 F3000.00G1 X37.06 Y21.42 F3000.00G1 X37.06 Y21 .42 F3000.00M300 S50.00 (pen up)G4 P150 (menunggu 150ms)(Polyline terdiri dari 29 segmen.)G1 X21.74 Y10.75 F3000.00M300 S30.00 (pen down)G4 P160 (menunggu 160ms)G1 X23.52 Y11.21 F3000.00G1 X24.24 Y11.32 F3000.00G1 X24.56 Y12.13 F3000.00G1 X24.48 Y12.99 F3000.00G1 X23.87 Y13.45 F3000.00G1 X23.38 Y13. 75 F3000.00G1 X22.69 Y13.25 F3000.00G1 X21.76 Y12.68 F3000.00G1 X21.57 Y12.14 F3000.00G1 X21.44 Y11.41 F3000.00G1 X20.80 Y10.64 F3000.00G1 X20 .54 Y10.34 F3000.00G1 X21.74 Y10.75 F3000.00G1 X21.74 Y10.75 F3000.00M300 S50.00 (pen up)G4 P150 (tunggu 150ms)(Polyline terdiri dari 29 segmen.)G1 X14. 28 Y15.20 F3000.00M300 S30.00 (pen down)G4 P160 (tunggu 160ms)G1 X14.69 Y15.95 F3000.00G1 X14.87 Y16.70 F3000.00G1 X13.98 Y16.78 F3000.00G1 X13.23 Y16.33 F3000.00G1 X13.26 Y15.80 F3000.00G1 X13.54 Y15.32 F3000.00G1 X13.94 Y15.06 F3000.00G1 X14.28 Y15.20 F3000.00G1 X14.28 Y15. 20 F3000.00M300 S50.00 (pen up)G4 P150 (menunggu 150ms)(Polyline terdiri dari 29 segmen.)G1 X23.89 Y15.40 F3000.00M300 S30.00 (pen down)G4 P160 (menunggu 160ms)G1 X24 .27 Y15.61 F3000.00G1 X24.44 Y16.05 F3000.00G1 X24.22 Y18.19 F3000.00G1 X24.03 Y18.95 F3000.00G1 X23.02 Y18.27 F3000.00G1 X20.70 Y17.13 F3000.00G1 X19.62 Y17.10 F3000.00G1 X18.46 Y17.41 F3000.00G1 X16.91 Y18.21 F3000.00G1 X16.22 Y18.67 F3000.00G1 X16.19 Y18.46 F3000.00G1 X15. 83 Y17.68 F3000.00G1 X15.47 Y16.93 F3000.00G1 X16.23 Y16.20 F3000.00G1 X18.05 Y15.51 F3000.00G1 X21.11 Y15.23 F3000.00G1 X23.89 Y15.40 F3000 .00M300 S50.00 (pen up)G4 P150 (tunggu 150ms)(Polyline terdiri dari 29 segmen.)G1 X21.29 Y17.47 F3000.00M300 S30.00 (pen down)G4 P160 (tunggu 160ms)G1 X23.50 Y18.80 F3000.00G1 X25.56 Y20.02 F3000.00G1 X26.14 Y20.17 F3000.00G1 X25.92 Y20.50 F3000.00G1 X24.80 Y21.28 F3000.00G1 X23.98 Y21.4 0 F3000.00G1 X22.98 Y21.10 F3000.00G1 X21.95 Y20.78 F3000.00G1 X21.63 Y20.62 F3000.00G1 X21.08 Y19.88 F3000.00G1 X20.05 Y19.10 F3000.00G1 X19 .03 Y19.22 F3000.00G1 X18.43 Y19.27 F3000.00G1 X17.95 Y19.18 F3000.00G1 X17.51 Y19.96 F3000.00G1 X17.19 Y20.04 F3000.00G1 X16.57 Y20.11 F3000.00G1 X16.13 Y20.58 F3000.00G1 X15.93 Y20.86 F3000.00G1 X15.70 Y20.63 F3000.00G1 X15.78 Y19.60 F3000.00G1 X16.86 Y18.45 F3000.00G1 X19. 13 Y17.31 F3000.00G1 X20.21 Y17.23 F3000.00G1 X21.29 Y17.47 F3000.00G1 X21.29 Y17.47 F3000.00M300 S50.00 (pen up)G4 P150 (tunggu 150ms)(Polyline terdiri dari 29 segmen.)G1 X26.41 Y19.09 F3000.00M300 S30.00 (pena turun)G4 P160 (tunggu 160 md)G1 X27.14 Y19.61 F3000.00G1 X27.43 Y20.17 F3000.00G1 X27.29 Y20.74 F3000.00G1 X26.71 Y21.31 F3000.00G1 X25.56 Y21.85 F3000.00G1 X24.35 Y22.08 F3000.00G1 X21.62 Y21.55 F3000.00G1 X21.69 Y21.22 F3000. 00G1 X21.91 Y20.88 F3000.00G1 X22.79 Y21.19 F3000.00G1 X24.30 Y21.49 F3000.00G1 X25.22 Y21.29 F3000.00G1 X25.94 Y20.72 F3000.00G1 X26.24 Y20 .20 F300 0.00G1 X25.65 Y19.87 F3000.00G1 X24.63 Y19.41 F3000.00G1 X24.25 Y18.98 F3000.00G1 X24.58 Y18.70 F3000.00G1 X25.38 Y18.71 F3000.00G1 X26.41 Y19.09 F3000.00M300 S50.00 (pen up)G4 P150 (menunggu 150ms)(Polyline terdiri dari 29 segmen.)G1 X20.47 Y19.52 F3000.00M300 S30.00 (pen down)G4 P160 (menunggu 160ms) G1 X21.59 Y21.02 F3000.00G1 X21.45 Y21.31 F3000.00G1 X20.18 Y21.30 F3000.00G1 X18.93 Y20.60 F3000.00G1 X18.73 Y19.89 F3000.00G1 X19.06 Y19 .38 F3000.00G1 X19.71 Y19.20 F3000.00G1 X20.47 Y19.52 F3000.00G1 X20.47 Y19.52 F3000.00M300 S50.00 (pen up)G4 P150 (tunggu 150ms)(Polyline terdiri dari 29 segmen.)G1 X18.40 Y19.46 F3000.00M300 S30.00 (pena turun)G4 P160 (tunggu 160 md)G1 X18.59 Y20.01 F3000.00G1 X18.80 Y20.68 F3000.00G1 X19.52 Y21. 20 F3000.00G1 X19.94 Y21.43 F3000.00G1 X19.77 Y21.57 F3000.00G1 X19.01 Y21.70 F3000.00G1 X18.36 Y21.46 F3000.00G1 X17.92 Y20.91 F3000.00G1 X17 .75 Y20.12 F3000.00G1 X18.11 Y19.31 F3000.00G1 X18.40 Y19.46 F3000.00M300 S50.00 (pen up)G4 P150 (tunggu 150ms)(Polyline terdiri dari ng dari 29 segmen.)G1 X17.34 Y20.21 F3000.00M300 S30.00 (pena turun)G4 P160 (tunggu 160 md)G1 X17.57 Y20.59 F3000.00G1 X18.44 Y21.73 F3000.00G1 X18. 77 Y21.86 F3000.00G1 X18.44 Y21.92 F3000.00G1 X17.48 Y21.91 F3000.00G1 X16.63 Y21.60 F3000.00G1 X16.25 Y20.93 F3000.00G1 X16.60 Y20.24 F3000 .00G1 X17.34 Y20.21 F3000.00G1 X17.34 Y20.21 F3000.00M300 S50.00 (pen up)G4 P150 (tunggu 150ms)(Polyline terdiri dari 29 segmen.)G1 X16.11 Y21.33 F3000. 00M300 S30.00 (pena turun)G4 P160 (tunggu 160ms)G1 X17.34 Y22.06 F3000.00G1 X18.96 Y21.93 F3000.00G1 X19.98 Y21.60 F3000.00G1 X22.66 Y21.94 F3000. 00G1 X25.66 Y22.90 F3000.00G1 X27.77 Y24.32 F3000.00G1 X28.39 Y24.96 F3000.00G1 X27.58 Y24.90 F3000.00G1 X25.33 Y24.89 F3000.00G1 X26.59 Y25 .01 F3000.00G1 X28.53 Y25.22 F3000.00G1 X29.82 Y25.72 F3000.00G1 X30.47 Y26.50 F3000.00G1 X30.47 Y27.56 F3000.00G1 X29.78 Y28.65 F3000.00G1 X28.52 Y29.02 F3000.00G1 X27.29 Y28.75 F3000.00G1 X26.23 Y27.86 F3000.00G1 X25.65 Y27.41 F3000.00G1 X24.92 Y27.29 F3000.00G1 X24.65 Y27. 31 F30 00.00G1 X24.86 Y27.34 F3000.00G1 X25.18 Y27.38 F3000.00G1 X24.95 Y27.67 F3000.00G1 X24.54 Y28.37 F3000.00G1 X23.69 Y29.39 F3000.00G1 X23.07 Y30.03 F3000.00G1 X23.26 Y29.99 F3000.00G1 X24.15 Y29.94 F3000.00G1 X24.73 Y30.08 F3000.00G1 X24.88 Y30.40 F3000.00G1 X25.06 Y30.76 F3000. 00G1 X25.72 Y30.30 F3000.00G1 X26.44 Y29.84 F3000.00G1 X27.29 Y29.51 F3000.00G1 X28.61 Y29.15 F3000.00G1 X29.24 Y29.13 F3000.00G1 X29.14 Y29 .58 F3000.00G1 X28.98 Y30.21 F3000.00G1 X27.91 Y30.88 F3000.00G1 X25.68 Y31.34 F3000.00G1 X22.80 Y31.52 F3000.00G1 X19.80 Y31.37 F3000.00G1 X18.50 Y31.23 F3000.00G1 X18.49 Y31.31 F3000.00G1 X22.58 Y31.67 F3000.00G1 X24.11 Y31.73 F3000.00G1 X23.99 Y31.95 F3000.00G1 X23.36 Y32. 13 F3000.00G1 X20.76 Y32.50 F3000.00G1 X20.31 Y32.72 F3000.00G1 X21.00 Y32.57 F3000.00G1 X23.09 Y32.33 F3000.00G1 X25.50 Y32.44 F3000.00G1 X27 .74 Y33.07 F3000.00G1 X29.12 Y34.03 F3000.00G1 X29.56 Y35.31 F3000.00G1 X28.81 Y36.44 F3000.00G1 X27.64 Y37.03 F3000.00G1 X25.83 Y37.40 F3000.00G1 X21.36 Y37.42 F30 00.00G1 X17.13 Y36.41 F3000.00G1 X13.56 Y34.53 F3000.00G1 X12.16 Y33.30 F3000.00G1 X11.08 Y31.92 F3000.00G1 X10.41 Y30.48 F3000.00G1 X10.25 Y28.79 F3000.00G1 X10.59 Y26.73 F3000.00G1 X10.96 Y25.92 F3000.00G1 X11.64 Y26.09 F3000.00G1 X14.41 Y26.25 F3000.00G1 X14.93 Y26.37 F3000. 00G1 X18.16 Y28.80 F3000.00G1 X19.16 Y29.37 F3000.00G1 X19.89 Y29.55 F3000.00G1 X21.95 Y29.85 F3000.00G1 X21.69 Y29.97 F3000.00G1 X21.49 Y30 .07 F3000.00G1 X22.66 Y29.69 F3000.00G1 X23.99 Y28.19 F3000.00G1 X22.32 Y28.67 F3000.00G1 X19.99 Y29.36 F3000.00G1 X19.26 Y29.28 F3000.00G1 X18.96 Y28.62 F3000.00G1 X18.86 Y28.24 F3000.00G1 X18.84 Y28.58 F3000.00G1 X18.72 Y28.93 F3000.00G1 X16.87 Y27.79 F3000.00G1 X15.17 Y26. 36 F3000.00G1 X15.64 Y25.80 F3000.00G1 X16.13 Y25.37 F3000.00G1 X15.74 Y25.56 F3000.00G1 X14.85 Y25.99 F3000.00G1 X13.66 Y26.16 F3000.00G1 X11 .44 Y25.87 F3000.00G1 X10.64 Y25.45 F3000.00G1 X10.13 Y24.87 F3000.00G1 X10.03 Y23.93 F3000.00G1 X10.90 Y22.46 F3000.00G1 X12.38 Y21.47 F3000.00G1 X15.35 Y20.88 F30 00.00G1 X16.11 Y21.33 F3000.00G1 X16.11 Y21.33 F3000.00M300 S50.00 (pen up)G4 P150 (tunggu 150ms)(Polyline terdiri dari 29 segmen.)G1 X20.69 Y22.24 F3000. 00M300 S30.00 (pena turun)G4 P160 (tunggu 160ms)G1 X20.79 Y22.76 F3000.00G1 X21.29 Y23.38 F3000.00G1 X22.37 Y23.78 F3000.00G1 X23.34 Y23.52 F3000. 00G1 X23.44 Y23.35 F3000.00G1 X23.10 Y23.48 F3000.00G1 X22.40 Y23.62 F3000.00G1 X21.47 Y23.27 F3000.00G1 X20.95 Y22.70 F3000.00G1 X20.99 Y22 .34 F3000.00G1 X20.95 Y22.21 F3000.00G1 X20.69 Y22.24 F3000.00M300 S50.00 (pen up)G4 P150 (tunggu 150ms)(Polyline terdiri dari 29 segmen.)G1 X14.38 Y22. 80 F3000.00M300 S30.00 (pena turun)G4 P160 (tunggu 160ms)G1 X13.38 Y23.55 F3000.00G1 X13.10 Y23.93 F3000.00G1 X13.67 Y24.07 F3000.00G1 X14.55 Y23. 88 F3000.00G1 X14.63 Y23.70 F3000.00G1 X14.39 Y23.52 F3000.00G1 X14.16 Y23.28 F3000.00G1 X14.51 Y22.88 F3000.00G1 X15.06 Y22.64 F3000.00G1 X15 .20 Y22.59 F3000.00G1 X14.92 Y22.47 F3000.00G1 X14.38 Y22.80 F3000.00G1 X14.38 Y22.80 F3000.00M300 S50.00 (pen up) G4 P150 (wai t 150ms)(Polyline terdiri dari 29 segmen.)G1 X12.06 Y23.03 F3000.00M300 S30.00 (pen down)G4 P160 (tunggu 160ms)G1 X12.09 Y23.74 F3000.00G1 X12.87 Y24.26 F3000.00G1 X13.76 Y24.43 F3000.00G1 X14.60 Y24.23 F3000.00G1 X16.38 Y23.00 F3000.00G1 X15.54 Y23.51 F3000.00G1 X14.54 Y24.12 F3000.00G1 X13. 63 Y24.26 F3000.00G1 X12.46 Y23.91 F3000.00G1 X12.19 Y23.55 F3000.00G1 X12.21 Y23.14 F3000.00G1 X12.23 Y22.89 F3000.00G1 X12.06 Y23.03 F3000 .00G1 X12.06 Y23.03 F3000.00M300 S50.00 (pen up)G4 P150 (tunggu 150ms)(Polyline terdiri dari 29 segmen.)G1 X21.77 Y26.53 F3000.00M300 S30.00 (pen down)G4 P160 (tunggu 160 md)G1 X20.93 Y27.02 F3000.00G1 X20.39 Y27.69 F3000.00G1 X20.47 Y29.03 F3000.00G1 X20.47 Y28.66 F3000.00G1 X20.46 Y27.93 F3000. 00G1 X20.81 Y27.32 F3000.00G1 X20.97 Y27.19 F3000.00G1 X20.93 Y27.34 F3000.00G1 X21.01 Y27.75 F3000.00G1 X21.46 Y27.92 F3000.00G1 X21.99 Y27 .74 F3000.00G1 X22.19 Y27.29 F3000.00G1 X21.82 Y26.88 F3000.00G1 X21.45 Y26.76 F3000.00G1 X21.85 Y26.63 F3000.00G1 X22.79 Y26.50 F3 000.00G1 X23.47 Y26.76 F3000.00G1 X23.76 Y27.26 F3000.00G1 X23.87 Y27.64 F3000.00G1 X23.99 Y27.52 F3000.00G1 X23.83 Y26.97 F3000.00G1 X23.03 Y26.40 F3000.00G1 X21.77 Y26.53 F3000.00G1 X21.77 Y26.53 F3000.00M300 S50.00 (pen up)G4 P150 (tunggu 150ms)(Polyline terdiri dari 29 segmen.)G1 X27.79 Y22 .99 F3000.00M300 S30.00 (pena bawah)G4 P160 (tunggu 160ms)G1 X29.58 Y24.08 F3000.00G1 X29.65 Y25.26 F3000.00G1 X29.13 Y25.25 F3000.00G1 X28.43 Y24 .71 F3000.00G1 X26.00 Y22.88 F3000.00G1 X26.04 Y22.79 F3000.00G1 X27.79 Y22.99 F3000.00G1 X27.79 Y22.99 F3000.00M300 S50.00 (pen up) G4 P150 (tunggu 150ms)(Polyline terdiri dari 29 segmen.)G1 X25.85 Y27.75 F3000.00M300 S30.00 (pen down)G4 P160 (tunggu 160ms)G1 X26.10 Y28.24 F3000.00G1 X25.81 Y28. 87 F3000.00G1 X24.91 Y29.47 F3000.00G1 X24.81 Y29.07 F3000.00G1 X25.01 Y28.67 F3000.00G1 X25.41 Y28.54 F3000.00G1 X25.55 Y28.20 F3000.00G1 X25 .36 Y27.82 F3000.00G1 X25.25 Y27.58 F3000.00G1 X25.43 Y27.46 F3000.00G1 X25.85 Y27.75 F3000.00M300 S50.00 (pen up)G4 P150 (wa itu 150ms)(Polyline terdiri dari 29 segmen.)G1 X23.53 Y28.63 F3000.00M300 S30.00 (pen down)G4 P160 (tunggu 160ms)G1 X22.85 Y29.32 F3000.00G1 X22.16 Y29.64 F3000.00G1 X21.18 Y29.54 F3000.00G1 X20.71 Y29.43 F3000.00G1 X22.20 Y28.86 F3000.00G1 X23.73 Y28.29 F3000.00G1 X23.53 Y28.63 F3000.00G1 X23. 53 Y28.63 F3000.00M300 S50.00 (pen up)G4 P150 (tunggu 150ms)(Polyline terdiri dari 29 segmen.)G1 X27.46 Y28.97 F3000.00M300 S30.00 (pen down)G4 P160 (tunggu 160ms )G1 X27.72 Y29.09 F3000.00G1 X26.09 Y29.77 F3000.00G1 X25.56 Y29.96 F3000.00G1 X25.77 Y29.98 F3000.00G1 X25.59 Y30.22 F3000.00G1 X25.15 Y30.48 F3000.00G1 X25.02 Y30.03 F3000.00G1 X25.02 Y29.65 F3000.00G1 X25.34 Y29.43 F3000.00G1 X26.04 Y28.78 F3000.00G1 X26.34 Y28.31 F3000. 00G1 X26.77 Y28.61 F3000.00G1 X27.46 Y28.97 F3000.00G1 X27.46 Y28.97 F3000.00M300 S50.00 (pen up)G4 P150 (tunggu 150ms)(Polyline terdiri dari 29 segmen.)G1 X24.71 Y29.72 F3000.00M300 S30.00 (pena turun)G4 P160 (tunggu 160ms)G1 X24.20 Y29.82 F3000.00G1 X23.65 Y29.70 F3000.0 0G1 X24.07 Y29.24 F3000.00G1 X24.53 Y28.81 F3000.00G1 X24.62 Y29.16 F3000.00G1 X24.71 Y29.72 F3000.00G1 X24.71 Y29.72 F3000.00M300 S50.00 ( pena up)G4 P150 (tunggu 150ms)(Polyline terdiri dari 29 segmen.)G1 X5.54 Y5.46 F3000.00M300 S30.00 (pen down)G4 P160 (tunggu 160ms)G1 X5.91 Y5.48 F3000.00G1 X5.65 Y5.39 F3000.00G1 X5.54 Y5.46 F3000.00G1 X5.54 Y5.46 F3000.00M300 S50.00 (pen up)G4 P150 (tunggu 150ms)(Polyline terdiri dari 29 segmen.)G1 X6 .11 Y5.52 F3000.00M300 S30.00 (pena turun)G4 P160 (tunggu 160ms)G1 X6.17 Y5.64 F3000.00G1 X6.18 Y5.47 F3000.00G1 X6.11 Y5.52 F3000.00G1 X6 .11 Y5.52 F3000.00M300 S50.00 (pen up)G4 P150 (menunggu 150ms)(Polyline terdiri dari 29 segmen.)G1 X6.34 Y5.49 F3000.00M300 S30.00 (pen down)G4 P160 (menunggu 160ms)G1 X6.88 Y5.56 F3000.00G1 X7.42 Y5.50 F3000.00G1 X6.88 Y5.43 F3000.00G1 X6.34 Y5.49 F3000.00M300 S50.00 (pen up) G4 P150 (tunggu 150ms)(Polyline terdiri dari 29 segmen.)G1 X7.58 Y5.52 F3000.00M300 S30.00 (pen down)G4 P160 (tunggu 160ms)G1 X7.74 Y5.60 F3000.00G1 X7.8 3 Y5.48 F3000.00G1 X7.58 Y5.52 F3000.00M300 S50.00 (pen up)G4 P150 (tunggu 150ms)(Polyline terdiri dari 29 segmen.)G1 X8.50 Y5.49 F3000.00M300 S30.00 (pena bawah)G4 P160 (tunggu 160ms)G1 X8.86 Y5.58 F3000.00G1 X9.21 Y5.51 F3000.00G1 X8.86 Y5.42 F3000.00G1 X8.50 Y5.49 F3000.00M300 S50.00 (pen up)G4 P150 (tunggu 150ms)(Polyline terdiri dari 29 segmen.)G1 X6.75 Y6.41 F3000.00M300 S30.00 (pen down)G4 P160 (tunggu 160ms)G1 X6.93 Y6.46 F3000. 00G1 X6.91 Y6.29 F3000.00G1 X6.75 Y6.41 F3000.00G1 X6.75 Y6.41 F3000.00M300 S50.00 (pen up)G4 P150 (tunggu 150ms)(Polyline terdiri dari 29 segmen.)G1 X7.49 Y6.39 F3000.00M300 S30.00 (pena turun)G4 P160 (tunggu 160ms)G1 X7.53 Y6.53 F3000.00G1 X7.70 Y6.45 F3000.00G1 X7.49 Y6.39 F3000.00G1 X7.49 Y6.39 F3000.00M300 S50.00 (pen up)G4 P150 (tunggu 150ms)(Polyline terdiri dari 29 segmen.)G1 X16.85 Y4.97 F3000.00M300 S30.00 (pen down)G4 P160 ( tunggu 160ms)G1 X14.07 Y5.98 F3000.00G1 X13.33 Y6.40 F3000.00G1 X10.74 Y6.40 F3000.00G1 X8.14 Y6.49 F3000.00G1 X10.60 Y6.58 F3000 .00G1 X13.07 Y6.64 F3000.00G1 X12.75 Y6.98 F3000.00G1 X11.99 Y8.33 F3000.00G1 X12.30 Y9.13 F3000.00G1 X12.98 Y9.85 F3000.00G1 X14.73 Y10.48 F3000.00G1 X16.42 Y10.34 F3000.00G1 X16.89 Y10.16 F3000.00G1 X17.20 Y10.44 F3000.00G1 X17.44 Y10.92 F3000.00G1 X15.95 Y12.12 F3000. 00G1 X14.52 Y13.21 F3000.00G1 X14.17 Y14.50 F3000.00G1 X14.18 Y14.85 F3000.00G1 X13.90 Y14.95 F3000.00G1 X13.30 Y15.34 F3000.00G1 X13.02 Y16 .08 F3000.00G1 X13.23 Y16.62 F3000.00G1 X14.03 Y16.94 F3000.00G1 X14.80 Y16.89 F3000.00G1 X15.21 Y16.80 F3000.00G1 X15.35 Y17.02 F3000.00G1 X15.71 Y17.77 F3000.00G1 X16.05 Y18.61 F3000.00G1 X15.77 Y19.35 F3000.00G1 X15.47 Y20.24 F3000.00G1 X15.20 Y20.73 F3000.00G1 X13.98 Y20. 91 F3000.00G1 X12.47 Y21.26 F3000.00G1 X11.32 Y21.88 F3000.00G1 X10.23 Y23.00 F3000.00G1 X9.82 Y24.17 F3000.00G1 X9.94 Y24.90 F3000.00G1 X10 .41 Y25.47 F3000.00G1 X10.77 Y25.78 F3000.00G1 X10.53 Y26.37 F3000.00G1 X10.04 Y28.07 F3000.00G1 X10.02 Y29.68 F3000.00G1 X10.50 Y31.25 F3000.00G1 X11.46 Y32.80 F3000.00G1 X 13.34 Y34.54 F3000.00G1 X15.75 Y36.02 F3000.00G1 X16.94 Y36.57 F3000.00G1 X11.31 Y36.60 F3000.00G1 X5.53 Y36.58 F3000.00G1 X5.38 Y21.60 F3000.00G1 X5.41 Y8.55 F3000.00G1 X5.62 Y6.61 F3000.00G1 X5.85 Y6.48 F3000.00G1 X5.50 Y6.40 F3000.00G1 X5.14 Y6.40 F3000.00G1 X5.14 Y21.60 F3000.00G1 X5.14 Y36.80 F3000.00G1 X11.39 Y36.80 F3000.00G1 X17.65 Y36.80 F3000.00G1 X18.65 Y37.07 F3000.00G1 X21.13 Y37.54 F3000.00G1 X23.70 Y37.69 F3000.00G1 X26.12 Y37.52 F3000.00G1 X28.11 Y37.03 F3000.00G1 X28.70 Y36.80 F3000.00G1 X33.01 Y36.80 F3000.00G1 X37.32 Y36.80 F3000.00G1 X37.32 Y21.60 F3000.00G1 X37.32 Y6.40 F3000.00G1 X32.21 Y6.40 F3000.00G1 X26.73 Y6.25 F3000.00G1 X22.57 Y5.07 F3000.00G1 X16.85 Y4.97 F3000.00G1 X16.85 Y4.97 F3000.00M300 S50.00 (pen up)G4 P150 (wait 150ms)(Polyline consisting of 29 segments.)G1 X20.57 Y5.03 F3000.00M300 S30.00 (pen down)G4 P160 (wait 160ms)G1 X23.06 Y5.34 F3000.00G1 X24.86 Y5.94 F3000.00G1 X25.99 Y6.82 F3000.00G1 X26.48 Y8.01 F3000.00G1 X26.11 Y9.51 F3000.00G1 X24.89 Y 10.76 F3000.00G1 X23.73 Y11.07 F3000.00G1 X22.18 Y10.75 F3000.00G1 X20.76 Y10.29 F3000.00G1 X20.13 Y9.96 F3000.00G1 X19.83 Y9.40 F3000.00G1 X19.66 Y9.17 F3000.00G1 X19.74 Y9.72 F3000.00G1 X20.51 Y10.61 F3000.00G1 X21.41 Y11.91 F3000.00G1 X21.31 Y12.42 F3000.00G1 X20.85 Y12.91 F3000.00G1 X19.04 Y13.73 F3000.00G1 X18.83 Y13.81 F3000.00G1 X19.56 Y13.72 F3000.00G1 X20.90 Y13.07 F3000.00G1 X21.48 Y12.71 F3000.00G1 X21.88 Y12.90 F3000.00G1 X23.87 Y14.56 F3000.00G1 X24.34 Y15.23 F3000.00G1 X23.85 Y15.22 F3000.00G1 X19.04 Y15.20 F3000.00G1 X16.99 Y15.70 F3000.00G1 X15.62 Y16.42 F3000.00G1 X15.31 Y16.66 F3000.00G1 X14.86 Y15.95 F3000.00G1 X14.39 Y14.29 F3000.00G1 X14.89 Y12.97 F3000.00G1 X16.02 Y12.25 F3000.00G1 X17.19 Y11.48 F3000.00G1 X17.63 Y10.79 F3000.00G1 X16.90 Y10.01 F3000.00G1 X16.07 Y9.45 F3000.00G1 X16.23 Y9.73 F3000.00G1 X16.50 Y10.15 F3000.00G1 X14.70 Y10.34 F3000.00G1 X13.17 Y9.72 F3000.00G1 X12.44 Y9.03 F3000.00G1 X12.23 Y8.30 F3000.00G1 X12.53 Y7.53 F3000.00G1 X13.34 Y6.71 F3000 .00G1 X15.72 Y5.44 F3000.00G1 X18.83 Y4.95 F3000.00G1 X20.57 Y5.03 F3000.00G1 X20.57 Y5.03 F3000.00M300 S50.00 (pen up)G4 P150 (wait 150ms)(Polyline consisting of 29 segments.)G1 X27.30 Y6.65 F3000.00M300 S30.00 (pen down)G4 P160 (wait 160ms)G1 X29.25 Y7.52 F3000.00G1 X30.16 Y8.34 F3000.00G1 X30.46 Y9.06 F3000.00G1 X30.29 Y9.88 F3000.00G1 X29.49 Y10.84 F3000.00G1 X28.16 Y11.51 F3000.00G1 X26.25 Y11.62 F3000.00G1 X25.07 Y10.96 F3000.00G1 X25.51 Y10.50 F3000.00G1 X26.26 Y9.62 F3000.00G1 X26.58 Y8.19 F3000.00G1 X26.44 Y7.12 F3000.00G1 X25.77 Y6.34 F3000.00G1 X25.47 Y6.07 F3000.00G1 X25.68 Y6.08 F3000.00G1 X27.30 Y6.65 F3000.00G1 X27.30 Y6.65 F3000.00M300 S50.00 (pen up)G4 P150 (wait 150ms)(Polyline consisting of 29 segments.)G1 X37.06 Y21.42 F3000.00M300 S30.00 (pen down)G4 P160 (wait 160ms)G1 X37.02 Y36.41 F3000.00G1 X36.96 Y36.62 F3000.00G1 X33.06 Y36.62 F3000.00G1 X29.16 Y36.58 F3000.00G1 X29.47 Y36.10 F3000.00G1 X29.73 Y35.05 F3000.00G1 X29.34 Y34.00 F3000.00G1 X28.36 Y33.19 F3000.00G 1 X26.78 Y32.58 F3000.00G1 X24.56 Y32.18 F3000.00G1 X24.11 Y32.04 F3000.00G1 X24.44 Y31.73 F3000.00G1 X25.27 Y31.55 F3000.00G1 X28.11 Y31.00 F3000.00G1 X28.91 Y30.55 F3000.00G1 X29.29 Y29.72 F3000.00G1 X29.84 Y28.76 F3000.00G1 X30.44 Y28.08 F3000.00G1 X30.69 Y27.27 F3000.00G1 X30.58 Y26.46 F3000.00G1 X30.11 Y25.77 F3000.00G1 X29.82 Y25.45 F3000.00G1 X29.90 Y25.05 F3000.00G1 X29.83 Y24.22 F3000.00G1 X28.51 Y23.12 F3000.00G1 X26.38 Y22.66 F3000.00G1 X25.09 Y22.48 F3000.00G1 X24.68 Y22.25 F3000.00G1 X24.95 Y22.15 F3000.00G1 X26.03 Y21.82 F3000.00G1 X27.25 Y21.07 F3000.00G1 X27.59 Y20.36 F3000.00G1 X27.42 Y19.68 F3000.00G1 X26.21 Y18.82 F3000.00G1 X24.70 Y18.51 F3000.00G1 X24.39 Y18.50 F3000.00G1 X24.42 Y18.22 F3000.00G1 X24.59 Y16.70 F3000.00G1 X24.63 Y15.61 F3000.00G1 X24.39 Y15.01 F3000.00G1 X23.81 Y14.22 F3000.00G1 X23.52 Y13.85 F3000.00G1 X24.03 Y13.49 F3000.00G1 X24.69 Y12.99 F3000.00G1 X24.78 Y12.31 F3000.00G1 X24.54 Y11.48 F3000.00G1 X24.58 Y11.08 F3000.00G1 X25.21 Y11.31 F3000.00G 1 X26.08 Y11.74 F3000.00G1 X27.14 Y11.85 F3000.00G1 X28.29 Y11.66 F3000.00G1 X29.41 Y11.16 F3000.00G1 X30.24 Y10.39 F3000.00G1 X30.57 Y9.37 F3000.00...This file has been truncated, please download it to see its full contents.
Stepper CodeArduino
//AMIT#include #include #define LINE_BUFFER_LENGTH 512char STEP =MICROSTEP;// Servo position for Up and Down const int penZUp =115;const int penZDown =83;// Servo on PWM pin 10const int penServoPin =10;// Should be right for DVD steppers, but is not too important hereconst int stepsPerRevolution =48; // create servo object to control a servo Servo penServo; // Initialize steppers for X- and Y-axis using this Arduino pins for the L293D H-bridgeAF_Stepper myStepperY(stepsPerRevolution,1); AF_Stepper myStepperX(stepsPerRevolution,2); /* Structures, global variables */struct point { float x; float y; float z; };// Current position of plotheadstruct point actuatorPos;// Drawing settings, should be OKfloat StepInc =1;int StepDelay =0;int LineDelay =0;int penDelay =50;// Motor steps to go 1 millimeter.// Use test sketch to go 100 steps. Measure the length of line. // Calculate steps per mm. Enter here.float StepsPerMillimeterX =100.0;float StepsPerMillimeterY =100.0;// Drawing robot limits, in mm// OK to start with. Could go up to 50 mm if calibrated well. float Xmin =0;float Xmax =40;float Ymin =0;float Ymax =40;float Zmin =0;float Zmax =1;float Xpos =Xmin;float Ypos =Ymin;float Zpos =Zmax; // Set to true to get debug output.boolean verbose =false;// Needs to interpret // G1 for moving// G4 P300 (wait 150ms)// M300 S30 (pen down)// M300 S50 (pen up)// Discard anything with a (// Discard any other command!/********************** * void setup() - Initialisations ***********************/void setup() { // Setup Serial.begin( 9600 ); penServo.attach(penServoPin); penServo.write(penZUp); delay(100); // Decrease if necessary myStepperX.setSpeed(600); myStepperY.setSpeed(600); // Set &move to initial default position // TBD // Notifications!!! Serial.println("Mini CNC Plotter alive and kicking!"); Serial.print("X range is from "); Serial.print(Xmin); Serial.print(" to "); Serial.print(Xmax); Serial.println(" mm."); Serial.print("Y range is from "); Serial.print(Ymin); Serial.print(" to "); Serial.print(Ymax); Serial.println(" mm."); }/********************** * void loop() - Main loop ***********************/void loop() { delay(100); char line[ LINE_BUFFER_LENGTH ]; karakter c; int lineIndex; bool lineIsComment, lineSemiColon; lineIndex =0; lineSemiColon =false; lineIsComment =false; while (1) { // Serial reception - Mostly from Grbl, added semicolon support while ( Serial.available()>0 ) { c =Serial.read(); if (( c =='\n') || (c =='\r') ) { // End of line reached if ( lineIndex> 0 ) { // Line is complete. Then execute! line[ lineIndex ] ='\0'; // Terminate string if (verbose) { Serial.print( "Received :"); Serial.println( line ); } processIncomingLine( line, lineIndex ); lineIndex =0; } else { // Empty or comment line. Skip block. } lineIsComment =false; lineSemiColon =false; Serial.println("ok"); } else { if ( (lineIsComment) || (lineSemiColon) ) { // Throw away all comment characters if ( c ==')' ) lineIsComment =false; // End of comment. Resume line. } else { if ( c <=' ' ) { // Throw away whitepace and control characters } else if ( c =='/' ) { // Block delete not supported. Ignore character. } else if ( c =='(' ) { // Enable comments flag and ignore all characters until ')' or EOL. lineIsComment =true; } else if ( c ==';' ) { lineSemiColon =true; } else if ( lineIndex>=LINE_BUFFER_LENGTH-1 ) { Serial.println( "ERROR - lineBuffer overflow" ); lineIsComment =false; lineSemiColon =false; } else if ( c>='a' &&c <='z' ) { // Upcase lowercase line[ lineIndex++ ] =c-'a'+'A'; } else { line[ lineIndex++ ] =c; } } } } }}void processIncomingLine( char* line, int charNB ) { int currentIndex =0; char buffer[ 64 ]; // Hope that 64 is enough for 1 parameter struct point newPos; newPos.x =0.0; newPos.y =0.0; // Needs to interpret // G1 for moving // G4 P300 (wait 150ms) // G1 X60 Y30 // G1 X30 Y50 // M300 S30 (pen down) // M300 S50 (pen up) // Discard anything with a ( // Discard any other command! while( currentIndex =Xmax) { x1 =Xmax; } if (x1 <=Xmin) { x1 =Xmin; } if (y1>=Ymax) { y1 =Ymax; } if (y1 <=Ymin) { y1 =Ymin; } if (verbose) { Serial.print("Xpos, Ypos:"); Serial.print(Xpos); Serial.print(","); Serial.print(Ypos); Serial.println(""); } if (verbose) { Serial.print("x1, y1:"); Serial.print(x1); Serial.print(","); Serial.print(y1); Serial.println(""); } // Convert coordinates to steps x1 =(int)(x1*StepsPerMillimeterX); y1 =(int)(y1*StepsPerMillimeterY); float x0 =Xpos; float y0 =Ypos; // Let's find out the change for the coordinates long dx =abs(x1-x0); long dy =abs(y1-y0); int sx =x0 dy) { for (i=0; i=dx) { over-=dx; myStepperY.onestep(sy,STEP); } delay(StepDelay); } } else { for (i=0; i=dy) { over-=dy; myStepperX.onestep(sx,STEP); } delay(StepDelay); } } if (verbose) { Serial.print("dx, dy:"); Serial.print(dx); Serial.print(","); Serial.print(dy); Serial.println(""); } if (verbose) { Serial.print("Going to ("); Serial.print(x0); Serial.print(","); Serial.print(y0); Serial.println(")"); } // Delay before any next lines are submitted delay(LineDelay); // Update the positions Xpos =x1; Ypos =y1;}// Raises penvoid penUp() { penServo.write(penZUp); delay(penDelay); Zpos=Zmax; digitalWrite(15, LOW); digitalWrite(16, HIGH); if (verbose) { Serial.println("Pen up!"); } }// Lowers penvoid penDown() { penServo.write(penZDown); delay(penDelay); Zpos=Zmin; digitalWrite(15, HIGH); digitalWrite(16, LOW); if (verbose) { Serial.println("Pen down."); } }
LibrariesArduino
// Adafruit Motor shield library// copyright Adafruit Industries LLC, 2009// this code is public domain, enjoy!#if (ARDUINO>=100) #include "Arduino.h"#else #if defined(__AVR__) #include #endif #include "WProgram.h"#endif#include "AFMotor.h"static uint8_t latch_state;#if (MICROSTEPS ==8)uint8_t microstepcurve[] ={0, 50, 98, 142, 180, 212, 236, 250, 255};#elif (MICROSTEPS ==16)uint8_t microstepcurve[] ={0, 25, 50, 74, 98, 120, 141, 162, 180, 197, 212, 225, 236, 244, 250, 253, 255};#endifAFMotorController::AFMotorController(void) { TimerInitalized =false;}void AFMotorController::enable(void) { // setup the latch /* LATCH_DDR |=_BV(LATCH); ENABLE_DDR |=_BV(ENABLE); CLK_DDR |=_BV(CLK); SER_DDR |=_BV(SER); */ pinMode(MOTORLATCH, OUTPUT); pinMode(MOTORENABLE, OUTPUT); pinMode(MOTORDATA, OUTPUT); pinMode(MOTORCLK, OUTPUT); latch_state =0; latch_tx(); // "reset" //ENABLE_PORT &=~_BV(ENABLE); // enable the chip outputs! digitalWrite(MOTORENABLE, LOW);}void AFMotorController::latch_tx(void) { uint8_t i; //LATCH_PORT &=~_BV(LATCH); digitalWrite(MOTORLATCH, LOW); //SER_PORT &=~_BV(SER); digitalWrite(MOTORDATA, LOW); for (i=0; i<8; i++) { //CLK_PORT &=~_BV(CLK); digitalWrite(MOTORCLK, LOW); if (latch_state &_BV(7-i)) { //SER_PORT |=_BV(SER); digitalWrite(MOTORDATA, HIGH); } else { //SER_PORT &=~_BV(SER); digitalWrite(MOTORDATA, LOW); } //CLK_PORT |=_BV(CLK); digitalWrite(MOTORCLK, HIGH); } //LATCH_PORT |=_BV(LATCH); digitalWrite(MOTORLATCH, HIGH);}static AFMotorController MC;/****************************************** MOTORS******************************************/inline void initPWM1(uint8_t freq) {#if defined(__AVR_ATmega8__) || \ defined(__AVR_ATmega48__) || \ defined(__AVR_ATmega88__) || \ defined(__AVR_ATmega168__) || \ defined(__AVR_ATmega328P__) // use PWM from timer2A on PB3 (Arduino pin #11) TCCR2A |=_BV(COM2A1) | _BV(WGM20) | _BV(WGM21); // fast PWM, turn on oc2a TCCR2B =freq &0x7; OCR2A =0;#elif defined(__AVR_ATmega1280__) || defined(__AVR_ATmega2560__) // on arduino mega, pin 11 is now PB5 (OC1A) TCCR1A |=_BV(COM1A1) | _BV(WGM10); // fast PWM, turn on oc1a TCCR1B =(freq &0x7) | _BV(WGM12); OCR1A =0;#elif defined(__PIC32MX__) #if defined(PIC32_USE_PIN9_FOR_M1_PWM) // Make sure that pin 11 is an input, since we have tied together 9 and 11 pinMode(9, OUTPUT); pinMode(11, INPUT); if (!MC.TimerInitalized) { // Set up Timer2 for 80MHz counting fro 0 to 256 T2CON =0x8000 | ((freq &0x07) <<4); // ON=1, FRZ=0, SIDL=0, TGATE=0, TCKPS=, T32=0, TCS=0; // ON=1, FRZ=0, SIDL=0, TGATE=0, TCKPS=0, T32=0, TCS=0 TMR2 =0x0000; PR2 =0x0100; MC.TimerInitalized =true; } // Setup OC4 (pin 9) in PWM mode, with Timer2 as timebase OC4CON =0x8006; // OC32 =0, OCTSEL=0, OCM=6 OC4RS =0x0000; OC4R =0x0000; #elif defined(PIC32_USE_PIN10_FOR_M1_PWM) // Make sure that pin 11 is an input, since we have tied together 9 and 11 pinMode(10, OUTPUT); pinMode(11, INPUT); if (!MC.TimerInitalized) { // Set up Timer2 for 80MHz counting fro 0 to 256 T2CON =0x8000 | ((freq &0x07) <<4); // ON=1, FRZ=0, SIDL=0, TGATE=0, TCKPS=, T32=0, TCS=0; // ON=1, FRZ=0, SIDL=0, TGATE=0, TCKPS=0, T32=0, TCS=0 TMR2 =0x0000; PR2 =0x0100; MC.TimerInitalized =true; } // Setup OC5 (pin 10) in PWM mode, with Timer2 as timebase OC5CON =0x8006; // OC32 =0, OCTSEL=0, OCM=6 OC5RS =0x0000; OC5R =0x0000; #else // If we are not using PWM for pin 11, then just do digital digitalWrite(11, LOW); #endif#else #error "This chip is not supported!"#endif #if !defined(PIC32_USE_PIN9_FOR_M1_PWM) &&!defined(PIC32_USE_PIN10_FOR_M1_PWM) pinMode(11, OUTPUT); #endif}inline void setPWM1(uint8_t s) {#if defined(__AVR_ATmega8__) || \ defined(__AVR_ATmega48__) || \ defined(__AVR_ATmega88__) || \ defined(__AVR_ATmega168__) || \ defined(__AVR_ATmega328P__) // use PWM from timer2A on PB3 (Arduino pin #11) OCR2A =s;#elif defined(__AVR_ATmega1280__) || defined(__AVR_ATmega2560__) // on arduino mega, pin 11 is now PB5 (OC1A) OCR1A =s;#elif defined(__PIC32MX__) #if defined(PIC32_USE_PIN9_FOR_M1_PWM) // Set the OC4 (pin 9) PMW duty cycle from 0 to 255 OC4RS =s; #elif defined(PIC32_USE_PIN10_FOR_M1_PWM) // Set the OC5 (pin 10) PMW duty cycle from 0 to 255 OC5RS =s; #else // If we are not doing PWM output for M1, then just use on/off if (s> 127) { digitalWrite(11, HIGH); } else { digitalWrite(11, LOW); } #endif#else #error "This chip is not supported!"#endif}inline void initPWM2(uint8_t freq) {#if defined(__AVR_ATmega8__) || \ defined(__AVR_ATmega48__) || \ defined(__AVR_ATmega88__) || \ defined(__AVR_ATmega168__) || \ defined(__AVR_ATmega328P__) // use PWM from timer2B (pin 3) TCCR2A |=_BV(COM2B1) | _BV(WGM20) | _BV(WGM21); // fast PWM, turn on oc2b TCCR2B =freq &0x7; OCR2B =0;#elif defined(__AVR_ATmega1280__) || defined(__AVR_ATmega2560__) // on arduino mega, pin 3 is now PE5 (OC3C) TCCR3A |=_BV(COM1C1) | _BV(WGM10); // fast PWM, turn on oc3c TCCR3B =(freq &0x7) | _BV(WGM12); OCR3C =0;#elif defined(__PIC32MX__) if (!MC.TimerInitalized) { // Set up Timer2 for 80MHz counting fro 0 to 256 T2CON =0x8000 | ((freq &0x07) <<4); // ON=1, FRZ=0, SIDL=0, TGATE=0, TCKPS=, T32=0, TCS=0; // ON=1, FRZ=0, SIDL=0, TGATE=0, TCKPS=0, T32=0, TCS=0 TMR2 =0x0000; PR2 =0x0100; MC.TimerInitalized =true; } // Setup OC1 (pin3) in PWM mode, with Timer2 as timebase OC1CON =0x8006; // OC32 =0, OCTSEL=0, OCM=6 OC1RS =0x0000; OC1R =0x0000;#else #error "This chip is not supported!"#endif pinMode(3, OUTPUT);}inline void setPWM2(uint8_t s) {#if defined(__AVR_ATmega8__) || \ defined(__AVR_ATmega48__) || \ defined(__AVR_ATmega88__) || \ defined(__AVR_ATmega168__) || \ defined(__AVR_ATmega328P__) // use PWM from timer2A on PB3 (Arduino pin #11) OCR2B =s;#elif defined(__AVR_ATmega1280__) || defined(__AVR_ATmega2560__) // on arduino mega, pin 11 is now PB5 (OC1A) OCR3C =s;#elif defined(__PIC32MX__) // Set the OC1 (pin3) PMW duty cycle from 0 to 255 OC1RS =s;#else #error "This chip is not supported!"#endif}inline void initPWM3(uint8_t freq) {#if defined(__AVR_ATmega8__) || \ defined(__AVR_ATmega48__) || \ defined(__AVR_ATmega88__) || \ defined(__AVR_ATmega168__) || \ defined(__AVR_ATmega328P__) // use PWM from timer0A / PD6 (pin 6) TCCR0A |=_BV(COM0A1) | _BV(WGM00) | _BV(WGM01); // fast PWM, turn on OC0A //TCCR0B =freq &0x7; OCR0A =0;#elif defined(__AVR_ATmega1280__) || defined(__AVR_ATmega2560__) // on arduino mega, pin 6 is now PH3 (OC4A) TCCR4A |=_BV(COM1A1) | _BV(WGM10); // fast PWM, turn on oc4a TCCR4B =(freq &0x7) | _BV(WGM12); //TCCR4B =1 | _BV(WGM12); OCR4A =0;#elif defined(__PIC32MX__) if (!MC.TimerInitalized) { // Set up Timer2 for 80MHz counting fro 0 to 256 T2CON =0x8000 | ((freq &0x07) <<4); // ON=1, FRZ=0, SIDL=0, TGATE=0, TCKPS=, T32=0, TCS=0; // ON=1, FRZ=0, SIDL=0, TGATE=0, TCKPS=0, T32=0, TCS=0 TMR2 =0x0000; PR2 =0x0100; MC.TimerInitalized =true; } // Setup OC3 (pin 6) in PWM mode, with Timer2 as timebase OC3CON =0x8006; // OC32 =0, OCTSEL=0, OCM=6 OC3RS =0x0000; OC3R =0x0000;#else #error "This chip is not supported!"#endif pinMode(6, OUTPUT);}inline void setPWM3(uint8_t s) {#if defined(__AVR_ATmega8__) || \ defined(__AVR_ATmega48__) || \ defined(__AVR_ATmega88__) || \ defined(__AVR_ATmega168__) || \ defined(__AVR_ATmega328P__) // use PWM from timer0A on PB3 (Arduino pin #6) OCR0A =s;#elif defined(__AVR_ATmega1280__) || defined(__AVR_ATmega2560__) // on arduino mega, pin 6 is now PH3 (OC4A) OCR4A =s;#elif defined(__PIC32MX__) // Set the OC3 (pin 6) PMW duty cycle from 0 to 255 OC3RS =s;#else #error "This chip is not supported!"#endif}inline void initPWM4(uint8_t freq) {#if defined(__AVR_ATmega8__) || \ defined(__AVR_ATmega48__) || \ defined(__AVR_ATmega88__) || \ defined(__AVR_ATmega168__) || \ defined(__AVR_ATmega328P__) // use PWM from timer0B / PD5 (pin 5) TCCR0A |=_BV(COM0B1) | _BV(WGM00) | _BV(WGM01); // fast PWM, turn on oc0a //TCCR0B =freq &0x7; OCR0B =0;#elif defined(__AVR_ATmega1280__) || defined(__AVR_ATmega2560__) // on arduino mega, pin 5 is now PE3 (OC3A) TCCR3A |=_BV(COM1A1) | _BV(WGM10); // fast PWM, turn on oc3a TCCR3B =(freq &0x7) | _BV(WGM12); //TCCR4B =1 | _BV(WGM12); OCR3A =0;#elif defined(__PIC32MX__) if (!MC.TimerInitalized) { // Set up Timer2 for 80MHz counting fro 0 to 256 T2CON =0x8000 | ((freq &0x07) <<4); // ON=1, FRZ=0, SIDL=0, TGATE=0, TCKPS=, T32=0, TCS=0; // ON=1, FRZ=0, SIDL=0, TGATE=0, TCKPS=0, T32=0, TCS=0 TMR2 =0x0000; PR2 =0x0100; MC.TimerInitalized =true; } // Setup OC2 (pin 5) in PWM mode, with Timer2 as timebase OC2CON =0x8006; // OC32 =0, OCTSEL=0, OCM=6 OC2RS =0x0000; OC2R =0x0000;#else #error "This chip is not supported!"#endif pinMode(5, OUTPUT);}inline void setPWM4(uint8_t s) {#if defined(__AVR_ATmega8__) || \ defined(__AVR_ATmega48__) || \ defined(__AVR_ATmega88__) || \ defined(__AVR_ATmega168__) || \ defined(__AVR_ATmega328P__) // use PWM from timer0A on PB3 (Arduino pin #6) OCR0B =s;#elif defined(__AVR_ATmega1280__) || defined(__AVR_ATmega2560__) // on arduino mega, pin 6 is now PH3 (OC4A) OCR3A =s;#elif defined(__PIC32MX__) // Set the OC2 (pin 5) PMW duty cycle from 0 to 255 OC2RS =s;#else #error "This chip is not supported!"#endif}AF_DCMotor::AF_DCMotor(uint8_t num, uint8_t freq) { motornum =num; pwmfreq =freq; MC.enable(); switch (num) { case 1:latch_state &=~_BV(MOTOR1_A) &~_BV(MOTOR1_B); // set both motor pins to 0 MC.latch_tx(); initPWM1(freq); merusak; case 2:latch_state &=~_BV(MOTOR2_A) &~_BV(MOTOR2_B); // set both motor pins to 0 MC.latch_tx(); initPWM2(freq); merusak; case 3:latch_state &=~_BV(MOTOR3_A) &~_BV(MOTOR3_B); // set both motor pins to 0 MC.latch_tx(); initPWM3(freq); merusak; case 4:latch_state &=~_BV(MOTOR4_A) &~_BV(MOTOR4_B); // set both motor pins to 0 MC.latch_tx(); initPWM4(freq); merusak; }}void AF_DCMotor::run(uint8_t cmd) { uint8_t a, b; switch (motornum) { case 1:a =MOTOR1_A; b =MOTOR1_B; merusak; case 2:a =MOTOR2_A; b =MOTOR2_B; merusak; case 3:a =MOTOR3_A; b =MOTOR3_B; merusak; case 4:a =MOTOR4_A; b =MOTOR4_B; merusak; default:return; } switch (cmd) { case FORWARD:latch_state |=_BV(a); latch_state &=~_BV(b); MC.latch_tx(); merusak; case BACKWARD:latch_state &=~_BV(a); latch_state |=_BV(b); MC.latch_tx(); merusak; case RELEASE:latch_state &=~_BV(a); // A and B both low latch_state &=~_BV(b); MC.latch_tx(); merusak; }}void AF_DCMotor::setSpeed(uint8_t speed) { switch (motornum) { case 1:setPWM1(speed); merusak; case 2:setPWM2(speed); merusak; case 3:setPWM3(speed); merusak; case 4:setPWM4(speed); merusak; }}/****************************************** STEPPERS******************************************/AF_Stepper::AF_Stepper(uint16_t steps, uint8_t num) { MC.enable(); revsteps =steps; steppernum =num; currentstep =0; if (steppernum ==1) { latch_state &=~_BV(MOTOR1_A) &~_BV(MOTOR1_B) &~_BV(MOTOR2_A) &~_BV(MOTOR2_B); // all motor pins to 0 MC.latch_tx(); // enable both H bridges pinMode(11, OUTPUT); pinMode(3, OUTPUT); digitalWrite(11, HIGH); digitalWrite(3, HIGH); // use PWM for microstepping support initPWM1(STEPPER1_PWM_RATE); initPWM2(STEPPER1_PWM_RATE); setPWM1(255); setPWM2(255); } else if (steppernum ==2) { latch_state &=~_BV(MOTOR3_A) &~_BV(MOTOR3_B) &~_BV(MOTOR4_A) &~_BV(MOTOR4_B); // all motor pins to 0 MC.latch_tx(); // enable both H bridges pinMode(5, OUTPUT); pinMode(6, OUTPUT); digitalWrite(5, HIGH); digitalWrite(6, HIGH); // use PWM for microstepping support // use PWM for microstepping support initPWM3(STEPPER2_PWM_RATE); initPWM4(STEPPER2_PWM_RATE); setPWM3(255); setPWM4(255); }}void AF_Stepper::setSpeed(uint16_t rpm) { usperstep =60000000 / ((uint32_t)revsteps * (uint32_t)rpm); steppingcounter =0;}void AF_Stepper::release(void) { if (steppernum ==1) { latch_state &=~_BV(MOTOR1_A) &~_BV(MOTOR1_B) &~_BV(MOTOR2_A) &~_BV(MOTOR2_B); // all motor pins to 0 MC.latch_tx(); } else if (steppernum ==2) { latch_state &=~_BV(MOTOR3_A) &~_BV(MOTOR3_B) &~_BV(MOTOR4_A) &~_BV(MOTOR4_B); // all motor pins to 0 MC.latch_tx(); }}void AF_Stepper::step(uint16_t steps, uint8_t dir, uint8_t style) { uint32_t uspers =usperstep; uint8_t ret =0; if (style ==INTERLEAVE) { uspers /=2; } else if (style ==MICROSTEP) { uspers /=MICROSTEPS; steps *=MICROSTEPS;#ifdef MOTORDEBUG Serial.print("steps ="); Serial.println(steps, DEC);#endif } while (steps--) { ret =onestep(dir, style); delay(uspers/1000); // in ms steppingcounter +=(uspers % 1000); if (steppingcounter>=1000) { delay(1); steppingcounter -=1000; } } if (style ==MICROSTEP) { while ((ret !=0) &&(ret !=MICROSTEPS)) { ret =onestep(dir, style); delay(uspers/1000); // in ms steppingcounter +=(uspers % 1000); if (steppingcounter>=1000) { delay(1); steppingcounter -=1000; } } }}uint8_t AF_Stepper::onestep(uint8_t dir, uint8_t style) { uint8_t a, b, c, d; uint8_t ocrb, ocra; ocra =ocrb =255; if (steppernum ==1) { a =_BV(MOTOR1_A); b =_BV(MOTOR2_A); c =_BV(MOTOR1_B); d =_BV(MOTOR2_B); } else if (steppernum ==2) { a =_BV(MOTOR3_A); b =_BV(MOTOR4_A); c =_BV(MOTOR3_B); d =_BV(MOTOR4_B); } else { return 0; } // next determine what sort of stepping procedure we're up to if (style ==SINGLE) { if ((currentstep/(MICROSTEPS/2)) % 2) { // we're at an odd step, weird if (dir ==FORWARD) { currentstep +=MICROSTEPS/2; } else { currentstep -=MICROSTEPS/2; } } else { // go to the next even step if (dir ==FORWARD) { currentstep +=MICROSTEPS; } else { currentstep -=MICROSTEPS; } } } else if (style ==DOUBLE) { if (! (currentstep/(MICROSTEPS/2) % 2)) { // we're at an even step, weird if (dir ==FORWARD) { currentstep +=MICROSTEPS/2; } else { currentstep -=MICROSTEPS/2; } } else { // go to the next odd step if (dir ==FORWARD) { currentstep +=MICROSTEPS; } else { currentstep -=MICROSTEPS; } } } else if (style ==INTERLEAVE) { if (dir ==FORWARD) { currentstep +=MICROSTEPS/2; } else { currentstep -=MICROSTEPS/2; } } if (style ==MICROSTEP) { if (dir ==FORWARD) { currentstep++; } else { // BACKWARDS currentstep--; } currentstep +=MICROSTEPS*4; currentstep %=MICROSTEPS*4; ocra =ocrb =0; if ( (currentstep>
=0) &&(currentstep
=MICROSTEPS) &&(currentstep
=MICROSTEPS*2) &&(currentstep
=MICROSTEPS*3) &&(currentstep #endif #include "WProgram.h"#endif#include "AFMotor.h"static uint8_t latch_state;#if (MICROSTEPS ==8)uint8_t microstepcurve[] ={0, 50, 98, 142, 180, 212, 236, 250, 255};#elif (MICROSTEPS ==16)uint8_t microstepcurve[] ={0, 25, 50, 74, 98, 120, 141, 162, 180, 197, 212, 225, 236, 244, 250, 253, 255};#endifAFMotorController::AFMotorController(void) { TimerInitalized =false;}void AFMotorController::enable(void) { // setup the latch /* LATCH_DDR |=_BV(LATCH); ENABLE_DDR |=_BV(ENABLE); CLK_DDR |=_BV(CLK); SER_DDR |=_BV(SER); */ pinMode(MOTORLATCH, OUTPUT); pinMode(MOTORENABLE, OUTPUT); pinMode(MOTORDATA, OUTPUT); pinMode(MOTORCLK, OUTPUT); latch_state =0; latch_tx(); // "reset" //ENABLE_PORT &=~_BV(ENABLE); // enable the chip outputs! digitalWrite(MOTORENABLE, LOW);}void AFMotorController::latch_tx(void) { uint8_t i; //LATCH_PORT &=~_BV(LATCH); digitalWrite(MOTORLATCH, LOW); //SER_PORT &=~_BV(SER); digitalWrite(MOTORDATA, LOW); for (i=0; i<8; i++) { //CLK_PORT &=~_BV(CLK); digitalWrite(MOTORCLK, LOW); if (latch_state &_BV(7-i)) { //SER_PORT |=_BV(SER); digitalWrite(MOTORDATA, HIGH); } else { //SER_PORT &=~_BV(SER); digitalWrite(MOTORDATA, LOW); } //CLK_PORT |=_BV(CLK); digitalWrite(MOTORCLK, HIGH); } //LATCH_PORT |=_BV(LATCH); digitalWrite(MOTORLATCH, HIGH);}static AFMotorController MC;/****************************************** MOTORS******************************************/inline void initPWM1(uint8_t freq) {#if defined(__AVR_ATmega8__) || \ defined(__AVR_ATmega48__) || \ defined(__AVR_ATmega88__) || \ defined(__AVR_ATmega168__) || \ defined(__AVR_ATmega328P__) // use PWM from timer2A on PB3 (Arduino pin #11) TCCR2A |=_BV(COM2A1) | _BV(WGM20) | _BV(WGM21); // fast PWM, turn on oc2a TCCR2B =freq &0x7; OCR2A =0;#elif defined(__AVR_ATmega1280__) || defined(__AVR_ATmega2560__) // on arduino mega, pin 11 is now PB5 (OC1A) TCCR1A |=_BV(COM1A1) | _BV(WGM10); // fast PWM, turn on oc1a TCCR1B =(freq &0x7) | _BV(WGM12); OCR1A =0;#elif defined(__PIC32MX__) #if defined(PIC32_USE_PIN9_FOR_M1_PWM) // Make sure that pin 11 is an input, since we have tied together 9 and 11 pinMode(9, OUTPUT); pinMode(11, INPUT); if (!MC.TimerInitalized) { // Set up Timer2 for 80MHz counting fro 0 to 256 T2CON =0x8000 | ((freq &0x07) <<4); // ON=1, FRZ=0, SIDL=0, TGATE=0, TCKPS=, T32=0, TCS=0; // ON=1, FRZ=0, SIDL=0, TGATE=0, TCKPS=0, T32=0, TCS=0 TMR2 =0x0000; PR2 =0x0100; MC.TimerInitalized =true; } // Setup OC4 (pin 9) in PWM mode, with Timer2 as timebase OC4CON =0x8006; // OC32 =0, OCTSEL=0, OCM=6 OC4RS =0x0000; OC4R =0x0000; #elif defined(PIC32_USE_PIN10_FOR_M1_PWM) // Make sure that pin 11 is an input, since we have tied together 9 and 11 pinMode(10, OUTPUT); pinMode(11, INPUT); if (!MC.TimerInitalized) { // Set up Timer2 for 80MHz counting fro 0 to 256 T2CON =0x8000 | ((freq &0x07) <<4); // ON=1, FRZ=0, SIDL=0, TGATE=0, TCKPS=, T32=0, TCS=0; // ON=1, FRZ=0, SIDL=0, TGATE=0, TCKPS=0, T32=0, TCS=0 TMR2 =0x0000; PR2 =0x0100; MC.TimerInitalized =true; } // Setup OC5 (pin 10) in PWM mode, with Timer2 as timebase OC5CON =0x8006; // OC32 =0, OCTSEL=0, OCM=6 OC5RS =0x0000; OC5R =0x0000; #else // If we are not using PWM for pin 11, then just do digital digitalWrite(11, LOW); #endif#else #error "This chip is not supported!"#endif #if !defined(PIC32_USE_PIN9_FOR_M1_PWM) &&!defined(PIC32_USE_PIN10_FOR_M1_PWM) pinMode(11, OUTPUT); #endif}inline void setPWM1(uint8_t s) {#if defined(__AVR_ATmega8__) || \ defined(__AVR_ATmega48__) || \ defined(__AVR_ATmega88__) || \ defined(__AVR_ATmega168__) || \ defined(__AVR_ATmega328P__) // use PWM from timer2A on PB3 (Arduino pin #11) OCR2A =s;#elif defined(__AVR_ATmega1280__) || defined(__AVR_ATmega2560__) // on arduino mega, pin 11 is now PB5 (OC1A) OCR1A =s;#elif defined(__PIC32MX__) #if defined(PIC32_USE_PIN9_FOR_M1_PWM) // Set the OC4 (pin 9) PMW duty cycle from 0 to 255 OC4RS =s; #elif defined(PIC32_USE_PIN10_FOR_M1_PWM) // Set the OC5 (pin 10) PMW duty cycle from 0 to 255 OC5RS =s; #else // If we are not doing PWM output for M1, then just use on/off if (s> 127) { digitalWrite(11, HIGH); } else { digitalWrite(11, LOW); } #endif#else #error "This chip is not supported!"#endif}inline void initPWM2(uint8_t freq) {#if defined(__AVR_ATmega8__) || \ defined(__AVR_ATmega48__) || \ defined(__AVR_ATmega88__) || \ defined(__AVR_ATmega168__) || \ defined(__AVR_ATmega328P__) // use PWM from timer2B (pin 3) TCCR2A |=_BV(COM2B1) | _BV(WGM20) | _BV(WGM21); // fast PWM, turn on oc2b TCCR2B =freq &0x7; OCR2B =0;#elif defined(__AVR_ATmega1280__) || defined(__AVR_ATmega2560__) // on arduino mega, pin 3 is now PE5 (OC3C) TCCR3A |=_BV(COM1C1) | _BV(WGM10); // fast PWM, turn on oc3c TCCR3B =(freq &0x7) | _BV(WGM12); OCR3C =0;#elif defined(__PIC32MX__) if (!MC.TimerInitalized) { // Set up Timer2 for 80MHz counting fro 0 to 256 T2CON =0x8000 | ((freq &0x07) <<4); // ON=1, FRZ=0, SIDL=0, TGATE=0, TCKPS=, T32=0, TCS=0; // ON=1, FRZ=0, SIDL=0, TGATE=0, TCKPS=0, T32=0, TCS=0 TMR2 =0x0000; PR2 =0x0100; MC.TimerInitalized =true; } // Setup OC1 (pin3) in PWM mode, with Timer2 as timebase OC1CON =0x8006; // OC32 =0, OCTSEL=0, OCM=6 OC1RS =0x0000; OC1R =0x0000;#else #error "This chip is not supported!"#endif pinMode(3, OUTPUT);}inline void setPWM2(uint8_t s) {#if defined(__AVR_ATmega8__) || \ defined(__AVR_ATmega48__) || \ defined(__AVR_ATmega88__) || \ defined(__AVR_ATmega168__) || \ defined(__AVR_ATmega328P__) // use PWM from timer2A on PB3 (Arduino pin #11) OCR2B =s;#elif defined(__AVR_ATmega1280__) || defined(__AVR_ATmega2560__) // on arduino mega, pin 11 is now PB5 (OC1A) OCR3C =s;#elif defined(__PIC32MX__) // Set the OC1 (pin3) PMW duty cycle from 0 to 255 OC1RS =s;#else #error "This chip is not supported!"#endif}inline void initPWM3(uint8_t freq) {#if defined(__AVR_ATmega8__) || \ defined(__AVR_ATmega48__) || \ defined(__AVR_ATmega88__) || \ defined(__AVR_ATmega168__) || \ defined(__AVR_ATmega328P__) // use PWM from timer0A / PD6 (pin 6) TCCR0A |=_BV(COM0A1) | _BV(WGM00) | _BV(WGM01); // fast PWM, turn on OC0A //TCCR0B =freq &0x7; OCR0A =0;#elif defined(__AVR_ATmega1280__) || defined(__AVR_ATmega2560__) // on arduino mega, pin 6 is now PH3 (OC4A) TCCR4A |=_BV(COM1A1) | _BV(WGM10); // fast PWM, turn on oc4a TCCR4B =(freq &0x7) | _BV(WGM12); //TCCR4B =1 | _BV(WGM12); OCR4A =0;#elif defined(__PIC32MX__) if (!MC.TimerInitalized) { // Set up Timer2 for 80MHz counting fro 0 to 256 T2CON =0x8000 | ((freq &0x07) <<4); // ON=1, FRZ=0, SIDL=0, TGATE=0, TCKPS=, T32=0, TCS=0; // ON=1, FRZ=0, SIDL=0, TGATE=0, TCKPS=0, T32=0, TCS=0 TMR2 =0x0000; PR2 =0x0100; MC.TimerInitalized =true; } // Setup OC3 (pin 6) in PWM mode, with Timer2 as timebase OC3CON =0x8006; // OC32 =0, OCTSEL=0, OCM=6 OC3RS =0x0000; OC3R =0x0000;#else #error "This chip is not supported!"#endif pinMode(6, OUTPUT);}inline void setPWM3(uint8_t s) {#if defined(__AVR_ATmega8__) || \ defined(__AVR_ATmega48__) || \ defined(__AVR_ATmega88__) || \ defined(__AVR_ATmega168__) || \ defined(__AVR_ATmega328P__) // use PWM from timer0A on PB3 (Arduino pin #6) OCR0A =s;#elif defined(__AVR_ATmega1280__) || defined(__AVR_ATmega2560__) // on arduino mega, pin 6 is now PH3 (OC4A) OCR4A =s;#elif defined(__PIC32MX__) // Set the OC3 (pin 6) PMW duty cycle from 0 to 255 OC3RS =s;#else #error "This chip is not supported!"#endif}inline void initPWM4(uint8_t freq) {#if defined(__AVR_ATmega8__) || \ defined(__AVR_ATmega48__) || \ defined(__AVR_ATmega88__) || \ defined(__AVR_ATmega168__) || \ defined(__AVR_ATmega328P__) // use PWM from timer0B / PD5 (pin 5) TCCR0A |=_BV(COM0B1) | _BV(WGM00) | _BV(WGM01); // fast PWM, turn on oc0a //TCCR0B =freq &0x7; OCR0B =0;#elif defined(__AVR_ATmega1280__) || defined(__AVR_ATmega2560__) // on arduino mega, pin 5 is now PE3 (OC3A) TCCR3A |=_BV(COM1A1) | _BV(WGM10); // fast PWM, turn on oc3a TCCR3B =(freq &0x7) | _BV(WGM12); //TCCR4B =1 | _BV(WGM12); OCR3A =0;#elif defined(__PIC32MX__) if (!MC.TimerInitalized) { // Set up Timer2 for 80MHz counting fro 0 to 256 T2CON =0x8000 | ((freq &0x07) <<4); // ON=1, FRZ=0, SIDL=0, TGATE=0, TCKPS=, T32=0, TCS=0; // ON=1, FRZ=0, SIDL=0, TGATE=0, TCKPS=0, T32=0, TCS=0 TMR2 =0x0000; PR2 =0x0100; MC.TimerInitalized =true; } // Setup OC2 (pin 5) in PWM mode, with Timer2 as timebase OC2CON =0x8006; // OC32 =0, OCTSEL=0, OCM=6 OC2RS =0x0000; OC2R =0x0000;#else #error "This chip is not supported!"#endif pinMode(5, OUTPUT);}inline void setPWM4(uint8_t s) {#if defined(__AVR_ATmega8__) || \ defined(__AVR_ATmega48__) || \ defined(__AVR_ATmega88__) || \ defined(__AVR_ATmega168__) || \ defined(__AVR_ATmega328P__) // use PWM from timer0A on PB3 (Arduino pin #6) OCR0B =s;#elif defined(__AVR_ATmega1280__) || defined(__AVR_ATmega2560__) // on arduino mega, pin 6 is now PH3 (OC4A) OCR3A =s;#elif defined(__PIC32MX__) // Set the OC2 (pin 5) PMW duty cycle from 0 to 255 OC2RS =s;#else #error "This chip is not supported!"#endif}AF_DCMotor::AF_DCMotor(uint8_t num, uint8_t freq) { motornum =num; pwmfreq =freq; MC.enable(); switch (num) { case 1:latch_state &=~_BV(MOTOR1_A) &~_BV(MOTOR1_B); // set both motor pins to 0 MC.latch_tx(); initPWM1(freq); merusak; case 2:latch_state &=~_BV(MOTOR2_A) &~_BV(MOTOR2_B); // set both motor pins to 0 MC.latch_tx(); initPWM2(freq); merusak; case 3:latch_state &=~_BV(MOTOR3_A) &~_BV(MOTOR3_B); // set both motor pins to 0 MC.latch_tx(); initPWM3(freq); merusak; case 4:latch_state &=~_BV(MOTOR4_A) &~_BV(MOTOR4_B); // set both motor pins to 0 MC.latch_tx(); initPWM4(freq); merusak; }}void AF_DCMotor::run(uint8_t cmd) { uint8_t a, b; switch (motornum) { case 1:a =MOTOR1_A; b =MOTOR1_B; merusak; case 2:a =MOTOR2_A; b =MOTOR2_B; merusak; case 3:a =MOTOR3_A; b =MOTOR3_B; merusak; case 4:a =MOTOR4_A; b =MOTOR4_B; merusak; default:return; } switch (cmd) { case FORWARD:latch_state |=_BV(a); latch_state &=~_BV(b); MC.latch_tx(); merusak; case BACKWARD:latch_state &=~_BV(a); latch_state |=_BV(b); MC.latch_tx(); merusak; case RELEASE:latch_state &=~_BV(a); // A and B both low latch_state &=~_BV(b); MC.latch_tx(); merusak; }}void AF_DCMotor::setSpeed(uint8_t speed) { switch (motornum) { case 1:setPWM1(speed); merusak; case 2:setPWM2(speed); merusak; case 3:setPWM3(speed); merusak; case 4:setPWM4(speed); merusak; }}/****************************************** STEPPERS******************************************/AF_Stepper::AF_Stepper(uint16_t steps, uint8_t num) { MC.enable(); revsteps =steps; steppernum =num; currentstep =0; if (steppernum ==1) { latch_state &=~_BV(MOTOR1_A) &~_BV(MOTOR1_B) &~_BV(MOTOR2_A) &~_BV(MOTOR2_B); // all motor pins to 0 MC.latch_tx(); // enable both H bridges pinMode(11, OUTPUT); pinMode(3, OUTPUT); digitalWrite(11, HIGH); digitalWrite(3, HIGH); // use PWM for microstepping support initPWM1(STEPPER1_PWM_RATE); initPWM2(STEPPER1_PWM_RATE); setPWM1(255); setPWM2(255); } else if (steppernum ==2) { latch_state &=~_BV(MOTOR3_A) &~_BV(MOTOR3_B) &~_BV(MOTOR4_A) &~_BV(MOTOR4_B); // all motor pins to 0 MC.latch_tx(); // enable both H bridges pinMode(5, OUTPUT); pinMode(6, OUTPUT); digitalWrite(5, HIGH); digitalWrite(6, HIGH); // use PWM for microstepping support // use PWM for microstepping support initPWM3(STEPPER2_PWM_RATE); initPWM4(STEPPER2_PWM_RATE); setPWM3(255); setPWM4(255); }}void AF_Stepper::setSpeed(uint16_t rpm) { usperstep =60000000 / ((uint32_t)revsteps * (uint32_t)rpm); steppingcounter =0;}void AF_Stepper::release(void) { if (steppernum ==1) { latch_state &=~_BV(MOTOR1_A) &~_BV(MOTOR1_B) &~_BV(MOTOR2_A) &~_BV(MOTOR2_B); // all motor pins to 0 MC.latch_tx(); } else if (steppernum ==2) { latch_state &=~_BV(MOTOR3_A) &~_BV(MOTOR3_B) &~_BV(MOTOR4_A) &~_BV(MOTOR4_B); // all motor pins to 0 MC.latch_tx(); }}void AF_Stepper::step(uint16_t steps, uint8_t dir, uint8_t style) { uint32_t uspers =usperstep; uint8_t ret =0; if (style ==INTERLEAVE) { uspers /=2; } else if (style ==MICROSTEP) { uspers /=MICROSTEPS; steps *=MICROSTEPS;#ifdef MOTORDEBUG Serial.print("steps ="); Serial.println(steps, DEC);#endif } while (steps--) { ret =onestep(dir, style); delay(uspers/1000); // in ms steppingcounter +=(uspers % 1000); if (steppingcounter>=1000) { delay(1); steppingcounter -=1000; } } if (style ==MICROSTEP) { while ((ret !=0) &&(ret !=MICROSTEPS)) { ret =onestep(dir, style); delay(uspers/1000); // in ms steppingcounter +=(uspers % 1000); if (steppingcounter>=1000) { delay(1); steppingcounter -=1000; } } }}uint8_t AF_Stepper::onestep(uint8_t dir, uint8_t style) { uint8_t a, b, c, d; uint8_t ocrb, ocra; ocra =ocrb =255; if (steppernum ==1) { a =_BV(MOTOR1_A); b =_BV(MOTOR2_A); c =_BV(MOTOR1_B); d =_BV(MOTOR2_B); } else if (steppernum ==2) { a =_BV(MOTOR3_A); b =_BV(MOTOR4_A); c =_BV(MOTOR3_B); d =_BV(MOTOR4_B); } else { return 0; } // next determine what sort of stepping procedure we're up to if (style ==SINGLE) { if ((currentstep/(MICROSTEPS/2)) % 2) { // we're at an odd step, weird if (dir ==FORWARD) { currentstep +=MICROSTEPS/2; } else { currentstep -=MICROSTEPS/2; } } else { // go to the next even step if (dir ==FORWARD) { currentstep +=MICROSTEPS; } else { currentstep -=MICROSTEPS; } } } else if (style ==DOUBLE) { if (! (currentstep/(MICROSTEPS/2) % 2)) { // we're at an even step, weird if (dir ==FORWARD) { currentstep +=MICROSTEPS/2; } else { currentstep -=MICROSTEPS/2; } } else { // go to the next odd step if (dir ==FORWARD) { currentstep +=MICROSTEPS; } else { currentstep -=MICROSTEPS; } } } else if (style ==INTERLEAVE) { if (dir ==FORWARD) { currentstep +=MICROSTEPS/2; } else { currentstep -=MICROSTEPS/2; } } if (style ==MICROSTEP) { if (dir ==FORWARD) { currentstep++; } else { // BACKWARDS currentstep--; } currentstep +=MICROSTEPS*4; currentstep %=MICROSTEPS*4; ocra =ocrb =0; if ( (currentstep>
=0) &&(currentstep
=MICROSTEPS) &&(currentstep
=MICROSTEPS*2) &&(currentstep
=MICROSTEPS*3) &&(currentstep Suku cadang dan penutup khusus
cnc_contour_SNa09InGkY.gm1 cnc_coppertop_PIxEVyoMWI.gtl