Demodulasi LVDT:Tipe Penyearah vs. Demodulasi Sinkron
Pelajari bagaimana dua metode demodulasi dibandingkan:demodulasi sinkron dan demodulasi tipe penyearah. Di sini kita membahas kelebihan, kekurangan, dan aplikasi yang sesuai dari setiap metode.
Dalam artikel sebelumnya, kami membahas operasi dan tantangan demodulator penyearah dioda. Pada artikel ini, pertama-tama kita akan melihat keterbatasan demodulator tipe penyearah secara umum. Kemudian, kita akan melihat bahwa demodulator sinkron dapat mengatasi beberapa masalah ini. Terakhir, kita akan melihat kerugian dari demodulasi sinkron dalam aplikasi LVDT.
Batasan Demodulator Jenis Penyearah
Meskipun penyearah presisi dapat mengatasi tantangan penyearah dioda sederhana, demodulator tipe penyearah memiliki beberapa kelemahan secara umum. Dengan demodulator tipe penyearah, kita memerlukan akses ke keran tengah sekunder LVDT untuk menyearahkan tegangan di setiap gulungan sekunder. Oleh karena itu, jenis demodulasi ini hanya berlaku untuk LVDT 5-kawat (Gambar 1(b)).
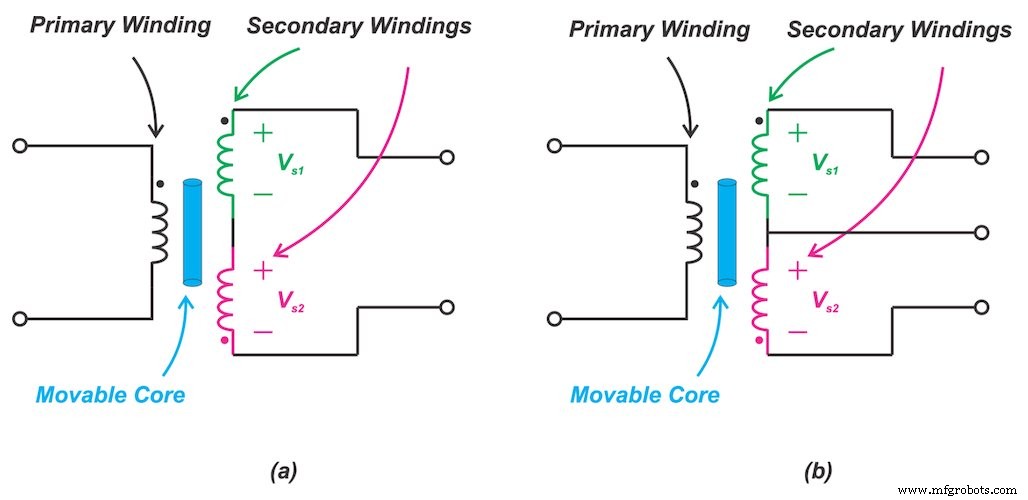
Gambar 1. (a) 4-kawat dan (b) LVDT 5-kawat.
Ada metode demodulasi lain yang tidak memerlukan akses ke center tap dan dapat menentukan posisi inti dengan memproses perbedaan tegangan antara kedua sekunder. Demodulator ini memungkinkan kita untuk menggunakan LVDT 4-kawat seperti yang digambarkan pada Gambar 1(a).
Apakah benar-benar penting untuk memiliki jumlah minimum sambungan listrik?
Ada banyak aplikasi di mana sirkuit pengkondisian terletak pada jarak yang jauh dari sensor. Contoh yang baik adalah melakukan pengukuran di lingkungan yang keras dari aplikasi radioaktif di mana sirkuit pengkondisian harus ditempatkan di area yang aman, bahkan hingga beberapa ratus meter dari LVDT. Dalam kasus ini, mungkin sulit untuk mentransmisikan dua tegangan sekunder jarak jauh melalui konfigurasi 5-kawat. Dengan modul pengkondisian yang terletak jauh dari LVDT, perlu memiliki kabel yang seimbang dengan kapasitansi terdistribusi rendah. Ini berarti peningkatan yang cukup besar dalam biaya pemasangan kabel.
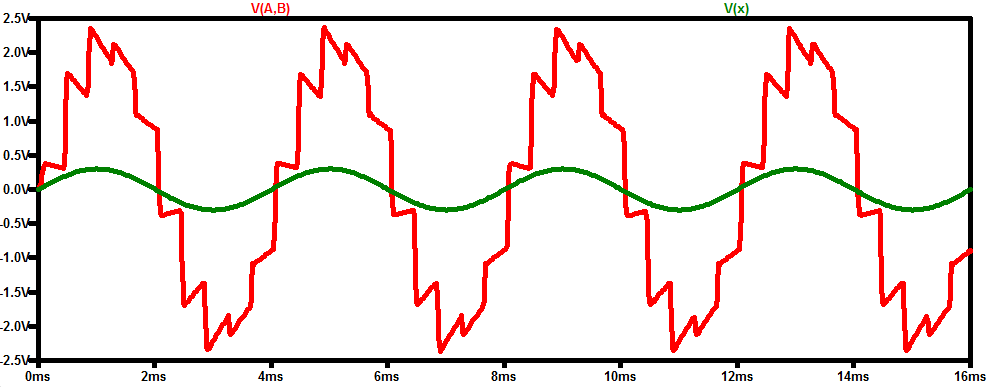
Kerugian lain dari demodulator tipe penyearah adalah penolakan kebisingan yang terbatas. Pertimbangkan sensor LVDT dengan perpindahan inti mengikuti bentuk gelombang sinusoidal pada 250 Hz. Kurva merah pada Gambar 2 menunjukkan keluaran demodulasi dari LVDT ini yang diperoleh dengan menggunakan penyearah dioda biasa.
Gambar 2.
Pada gambar ini, kurva hijau menunjukkan perpindahan inti x. Seperti yang Anda lihat, sinyal keluaran terlihat seperti versi x yang diperkuat kecuali bahwa ia memiliki beberapa perubahan mendadak yang sesuai dengan beberapa komponen frekuensi tinggi.
Untuk menghilangkan komponen frekuensi tinggi yang tidak diinginkan ini, kita dapat menggunakan filter low-pass dengan frekuensi cutoff sedikit lebih tinggi daripada bandwidth mekanis sistem (250 Hz). Oleh karena itu, bahkan dengan filter lolos rendah yang ideal, semua komponen frekuensi hingga 250 Hz akan melewati filter tanpa dilemahkan. Oleh karena itu, setiap komponen noise di bawah 250 Hz yang dipasangkan dengan output sensor akan muncul juga pada output demodulator.
Performa noise yang buruk merupakan kelemahan utama dari demodulator tipe rectifier. Keterbatasan ini menjadi lebih jelas dengan kabel panjang. Performa kebisingan bersama dengan persyaratan konfigurasi 5-kawat membuat sirkuit ini tidak cocok untuk kabel panjang yang berjalan ke lokasi terpencil. Demodulasi sinkron yang dibahas di bawah ini dapat mengatasi dua masalah ini.
Demodulasi Sinkron
Perhatikan LVDT yang ditunjukkan pada Gambar 3. Asumsikan bahwa kita memiliki \[V_{EXC} =A_p\cos(2\pi \times f_p \times t)\].
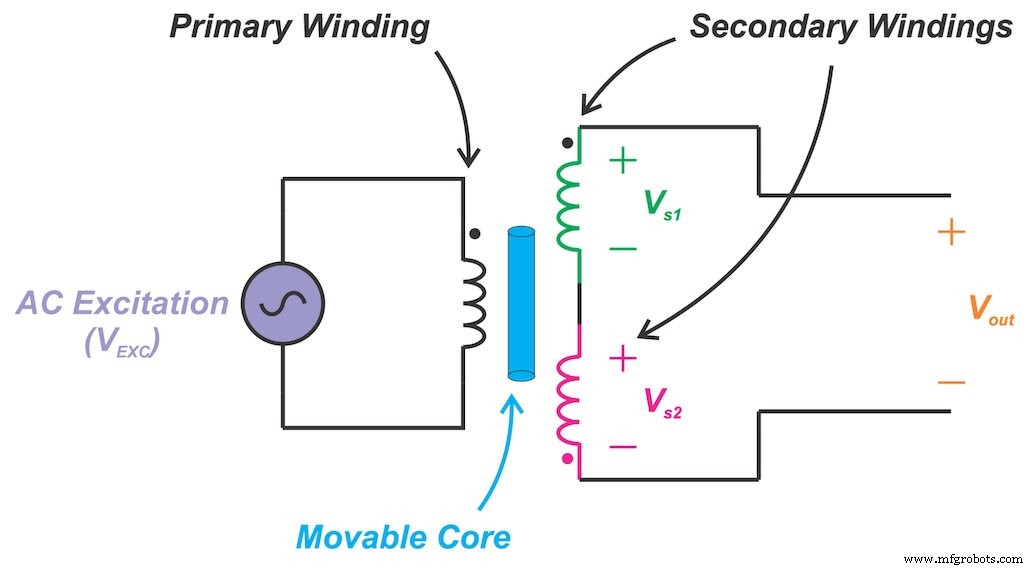
Gambar 3. Contoh LVDT
Output diferensial (\[V_{out}\]) adalah sinyal termodulasi amplitudo dan dapat dinyatakan sebagai:
\[V_{out} =A_s \times x \times \cos(2\pi \times f_p \times t + \phi)\]
Persamaan 1.
di mana x adalah perpindahan inti dan \[A_s\] adalah faktor penskalaan yang memberikan amplitudo keluaran keseluruhan untuk x tertentu. Istilah fase \[\phi\] adalah perbedaan fase yang disebabkan oleh LVDT antara tegangan primer dan sekunder. Pergeseran fase ini idealnya sangat kecil, terutama di sekitar frekuensi tertentu yang diberikan oleh pabrikan. Namun, kita biasanya perlu mempertimbangkan pergeseran fase ini.
Teknik demodulasi sinkron mengalikan output diferensial LVDT dengan sinyal eksitasi (atau sinyal sinkron dengan sinyal eksitasi pada umumnya). Ini memberikan:
\[V_{demod} =V_{out} \times V_{EXC} =A_s \times x \times \cos(2\pi \times f_p \times t + \ phi) \times A_p\cos(2\pi \times f_p \times t)\]
Persamaan 2.
yang disederhanakan menjadi:
\[V_{demod} =\frac{1}{2} \times A_s \times x \times A_p [\cos(\phi) + \cos(2\pi \times 2f_p \times t + \phi)]\]
Suku pertama di dalam kurung adalah DC, tetapi suku kedua adalah dua kali frekuensi eksitasi. Oleh karena itu, filter lolos-rendah yang sempit dapat menghapus suku kedua dan kita memiliki:
\[V_{filtered} =\frac{1}{2} \times A_s \times x \times A_p\cos(\phi)\]
Persamaan 3.
Ini memberi kita tegangan DC yang sebanding dengan perpindahan inti x.
Demodulasi Sinkron Melalui Perkalian dengan Gelombang Persegi
Kita dapat menggunakan pengali analog untuk mengalikan keluaran LVDT dengan gelombang sinus eksitasi (Persamaan 2); namun, pengganda analog mahal dan memiliki keterbatasan linearitas. Alih-alih mengalikan dengan gelombang sinus, kita dapat mengalikan sinyal dengan gelombang persegi yang sinkron dengan input eksitasi.
Anda mungkin bertanya-tanya bagaimana gelombang persegi dapat digunakan sebagai pengganti sinusoidal? Toggling gelombang persegi antara ±1 dapat dinyatakan sebagai jumlah sinusoidal tak terhingga pada harmonik ganjil dari frekuensi gelombang persegi. Oleh karena itu, frekuensi gelombang persegi \[f_p\] dapat dinyatakan sebagai:
\[v_{squarewave}(t) =\sum_{n=1, 3, 5}^{\infty}\frac{4}{n\pi}\sin (2\pi \times nf_p \times t)\]
Ketika keluaran LVDT (sebuah sinusoidal pada \[f_p\]) dikalikan dengan gelombang persegi, komponen fundamental dari gelombang persegi \[(\frac{4}{\pi}\sin(2\pi \times f_p \ kali t))\] menghasilkan komponen DC serta komponen frekuensi tinggi di \[2f_p\]. Komponen frekuensi tinggi akan ditekan oleh filter low-pass seperti yang dijelaskan pada bagian sebelumnya dan komponen DC yang diinginkan akan muncul pada output.
Perkalian dengan harmonik orde lebih tinggi dari gelombang persegi akan menghasilkan komponen frekuensi tinggi pada kelipatan genap \[f_p\]. Oleh karena itu, komponen DC adalah satu-satunya yang muncul pada keluaran filter seperti halnya mengalikan sinyal dengan sinusoidal. Keuntungan utama mengalikan dengan gelombang persegi adalah dapat menyederhanakan implementasi rangkaian demodulator secara signifikan.
Implementasi Sirkuit dari Demodulator Sinkron
Demodulator sinkron berbasis gelombang persegi ditunjukkan pada Gambar 4.
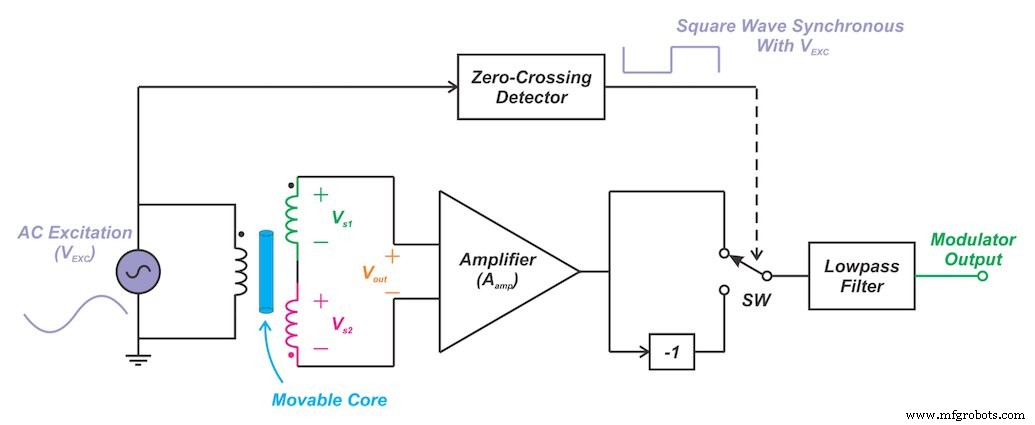
Gambar 4. Demodulator sinkron berbasis gelombang persegi
Dalam hal ini, versi keluaran LVDT yang diperkuat dikalikan dengan gelombang persegi daripada sinusoidal eksitasi. Gelombang persegi sinkron dengan input eksitasi dan diperoleh melalui “Zero-Crossing Detector” seperti yang ditunjukkan pada diagram blok di atas.
Untuk melakukan perkalian dengan gelombang persegi, penguatan rantai sinyal diubah secara berkala antara \[±A_{amp}\] (\[A_{amp}\] adalah penguatan penguat). Perhatikan bahwa jalur yang lebih rendah menggabungkan keuntungan -1. Ini dicapai dengan menggunakan gelombang persegi untuk menggerakkan sakelar SW yang mengubah jalur sinyal antara jalur atas dan bawah. Ini secara efektif setara dengan mengalikan output amplifier dengan gelombang persegi.
Terakhir, filter low-pass digunakan untuk menjaga keluaran DC dan menekan komponen frekuensi tinggi.
Kelebihan Demodulator Sinkron LVDT
Keuntungan utama dari demodulasi sinkron adalah kinerja kebisingannya. Seperti dibahas di atas, frekuensi demodulasi sinkron menggeser output LVDT ke DC dan menggunakan filter low-pass untuk menjaga komponen DC ini. Filter low-pass akan menekan semua komponen noise di luar passband-nya.
Karena sinyal yang kita inginkan berada di DC, kita dapat menggunakan filter low-pass yang sempit. Ini akan membatasi bandwidth sistem dan memungkinkan demodulator untuk secara signifikan menekan sebagian besar noise yang dipasangkan ke output LVDT. Selain itu, dengan demodulasi sinkron, kita dapat menggunakan LVDT 4-kawat.
Kekurangan Demodulator Sinkron LVDT
Meskipun demodulasi sinkron dapat menawarkan kekebalan kebisingan yang lebih tinggi dibandingkan dengan demodulator jenis penyearah, outputnya tergantung pada amplitudo tegangan eksitasi (\[A_p\] dalam Persamaan 3). Oleh karena itu, dengan demodulasi sinkron, stabilitas amplitudo input eksitasi sangat penting.
Masalah lainnya adalah bahwa keluaran demodulator bergantung pada pergeseran fasa dari fungsi transfer LVDT (\[\cos(\phi)\] dalam Persamaan 3). Pergeseran fase ini idealnya sangat kecil; namun, itu tidak konstan dan dapat berubah dengan titik operasi. Rangkaian demodulator praktis umumnya menggunakan jaringan kompensasi fase untuk menyesuaikan fase gelombang persegi yang dihasilkan. Jaringan kompensasi dapat meningkatkan kerumitan demodulator.
Namun, peningkatan kompleksitas ini membuat sirkuit cocok untuk kabel yang relatif lebih panjang jika dibandingkan dengan demodulator tipe penyearah. Hal ini disebabkan oleh fakta bahwa istilah pergeseran fasa \[\phi\] dapat digunakan untuk memperhitungkan penundaan yang disebabkan oleh pengkabelan. Oleh karena itu, sirkuit kompensasi fase juga dapat digunakan untuk mengkompensasi penundaan kabel dan membuat sirkuit cocok untuk kabel yang lebih panjang.
Teknik Demodulasi Lainnya
Demodulasi sinkron menawarkan kekebalan kebisingan yang lebih tinggi dan hanya membutuhkan empat sambungan listrik; namun, ia memiliki keterbatasannya sendiri seperti ketergantungan pada amplitudo input eksitasi serta masalah pergeseran fasa. Untuk mengatasi masalah tersebut, ada beberapa teknik demodulasi lainnya. Teknik ini biasanya menggunakan konsep pengukuran rasiometrik dan metode berbasis DSP untuk menghindari keterbatasan demodulator sinkron.
Untuk pembahasan yang lebih mendetail tentang demodulasi sinkron ketika diterapkan pada jenis sensor lain, silakan merujuk ke artikel berikut:
- Pengantar Demodulasi Sinkron
- Demodulasi Sinkron Menggunakan Pengganda Analog vs. Pengganda Berbasis Switch
- Implementasi Analog dan Digital dari Demodulator Sinkron
Untuk melihat daftar lengkap artikel saya, silakan kunjungi halaman ini.


