IMU MEMS Generasi Berikutnya — Performa Tinggi, Dapat Diskalakan
Untuk mengetahui apa yang ada di depan untuk sistem navigasi mobil MEMS, saya mewawancarai Yang Zhao, CEO, dan Teoman Ustun, VP Marketing and Business Development, ACEINNA, Inc. (Boston, MA).
Ringkasan Teknologi: Mengapa Anda menyebut ACEINNA IMU sebagai generasi berikutnya?
Yang Zhao: Dalam kondisi ideal, Anda dapat menavigasi mobil dengan satu kamera. Tetapi untuk mencapai keamanan dan ketersediaan sepanjang waktu, kendaraan otonom semakin mengandalkan teknologi sensor tambahan. Namun, sensor-sensor seperti Vision, Radar, Lidar, GNSS, RTK semuanya dapat dibutakan dalam situasi tertentu. IMU adalah satu-satunya sensor yang terus beroperasi bahkan ketika semua sensor lainnya gagal. Tantangan kami adalah untuk meningkatkan jumlah waktu yang perhitungan mati dengan IMU akan dapat diandalkan. Produk yang kami miliki saat ini lebih seperti tingkat industri kelas atas tetapi dirancang untuk dimasukkan ke dalam kartu penumpang.
Teoman Ustun: Teknologi MEMS revolusioner yang kami kembangkan akan mencapai kinerja gyro serat optik dengan harga solusi MEMS silikon. Itu pada dasarnya adalah teknologi yang mengubah permainan.
Dengan setiap generasi, kami telah meningkatkan kinerja IMU kami dalam hal Angular Random Walk (ARW), ketidakstabilan bias, dan kekebalan getaran/guncangan. Dengan generasi terbaru ini kami juga menambahkan arsitektur rangkap tiga, yang sangat penting karena dua alasan. Ini meningkatkan keandalan tingkat otomotif dan juga meningkatkan kinerja IMU. Sebagai contoh, sepengetahuan saya, kami memiliki satu-satunya ASIL-B ISO 26262 (Tingkat Integritas Keselamatan Otomotif) yang memenuhi syarat INS (sistem navigasi inersia) yang terintegrasi dengan IMU rangkap tiga di pasaran. Kualifikasi ini pada dasarnya memberikan kepercayaan kepada pelanggan otomotif bahwa sensor kami akan menghasilkan data yang kuat selama masa pakai kendaraan.
IMU terbaru kami juga memiliki fitur arsitektur terbuka yang memungkinkan pelanggan kami memanfaatkan, pengetahuan, atau menerapkan saus rahasia mereka di perangkat keras kami.
Zhao: IMU kelas kedirgantaraan memiliki stabilitas yang sangat baik tetapi besar, berat, dan mahal — lihat Gambar 1 untuk perbandingan nilai IMU yang berbeda. Kami bertujuan untuk membawa ke pasar sistem IMU yang akan mendekati tingkat navigasi. Hari ini, Anda bisa mendapatkan IMU tingkat navigasi, tetapi semuanya menggunakan gyros serat optik dan berada dalam kisaran harga puluhan ribu dolar. Mereka besar, berat, dan mahal, tetapi dalam avionik dan militer, itu bukan faktor yang mematikan.
Tetapi ketika Anda berbicara tentang menggunakan IMU di dalam mobil, tidak ada yang akan membayar uang sebanyak itu. Jadi, apa yang kami coba lakukan adalah mengembangkan teknologi MEMS IMU generasi baru yang dapat mencapai kinerja tingkat navigasi, yang dapat mendekati tingkat kinerja gyro serat optik. Tidak seperti orang lain yang awalnya menargetkan IMU tingkat konsumen dan sekarang mencoba mengalihkannya ke aplikasi berkinerja lebih tinggi, kami memulai dengan mempertimbangkan aplikasi kelas industri berkinerja tinggi, untuk menetapkan persyaratan sensor mobil kami.
Produk otomotif terbaru yang kami perkenalkan hemat biaya. Mereka sangat banyak dirancang dan dikembangkan dari bawah ke atas untuk memiliki optimasi harga/kinerja untuk aplikasi volume tinggi. Kami menargetkan harga kurang dari $500 dan akhirnya, bahkan lebih murah.
Ringkasan Teknologi: Bisakah Anda menjelaskan beberapa fitur yang meningkatkan akurasi, stabilitas, dan keandalan IMU baru Anda.
Ustun: Pertama-tama, sensor IMU kami memiliki redundansi tiga kali lipat — ada tiga akselerometer dan tiga gyro. Kami memantau semua parameter penting, termasuk voltase, arus, dan suhu, serta kinerja masing-masing IMU. Memiliki redundansi rangkap tiga ini memungkinkan kami untuk menerapkan pengujian mandiri berkelanjutan. Kami memperoleh keyakinan yang baik tentang kinerja gyro dan akselerometer dengan membandingkan dan membedakan aliran data tiga kali ini.

Kami juga memiliki enam derajat kebebasan:tiga akselerometer dan tiga gyro mengukur sumbu XYZ. Gyros mengukur kecepatan rotasi, yang bila diintegrasikan, memberikan perubahan posisi sudut. Akselerometer mengukur akselerasi, yang ketika terintegrasi memberikan kecepatan dan ketika terintegrasi lagi, memberikan posisi. Dengan memproses data gyro dan data akselerometer, dan menggunakan filter dan algoritme yang dioptimalkan untuk aplikasi tertentu, kami mendapatkan data sudut yang sangat akurat untuk roll, pitch, dan yaw (Lihat Gambar 2). Data paling penting untuk aplikasi otomotif adalah yaw, yang menunjukkan tingkat drifting mobil. Pitch menunjukkan apakah Anda akan naik atau turun bukit. Mudah-mudahan, Anda tidak akan pernah melihat gulungan di mobil Anda.
Ringkasan Teknologi: Keakuratan seperti apa yang dapat Anda pertahankan selama periode waktu apa?
Ustun: Itu sangat sulit untuk dikatakan karena itu tergantung pada begitu banyak skenario yang berbeda. Saat ini kami harus mencapai akurasi level lane. Sebuah lajur lebarnya sekitar tiga meter, dan sebuah mobil penumpang lebarnya sekitar dua meter. Karena Anda ingin memastikan bahwa Anda tidak melewati jalur, Anda memiliki sekitar plus atau minus setengah meter sebelum Anda melayang terlalu jauh. Pada kecepatan mobil biasa, koreksi setengah meter dapat dicapai dalam waktu kurang dari satu detik. Karena, dalam perhitungan mati, Anda dapat mempertahankan akurasi yang diperlukan selama 60 hingga 90 detik, IMU kami dapat dengan mudah menjaga mobil tetap berada di jalurnya.
Ringkasan Teknologi: Jadi, IMU memberi Anda akurasi relatif. Bagaimana dengan akurasi absolut?
Ustun: Data lokasi absolut umumnya berasal dari sinyal GNSS. Secara historis, akurasi posisi penerima GNSS telah menjadi satu meter atau lebih. Jadi, GNSS sendiri tidak cukup baik untuk akurasi tingkat lajur mobil yang dibutuhkan hingga 2 cm.
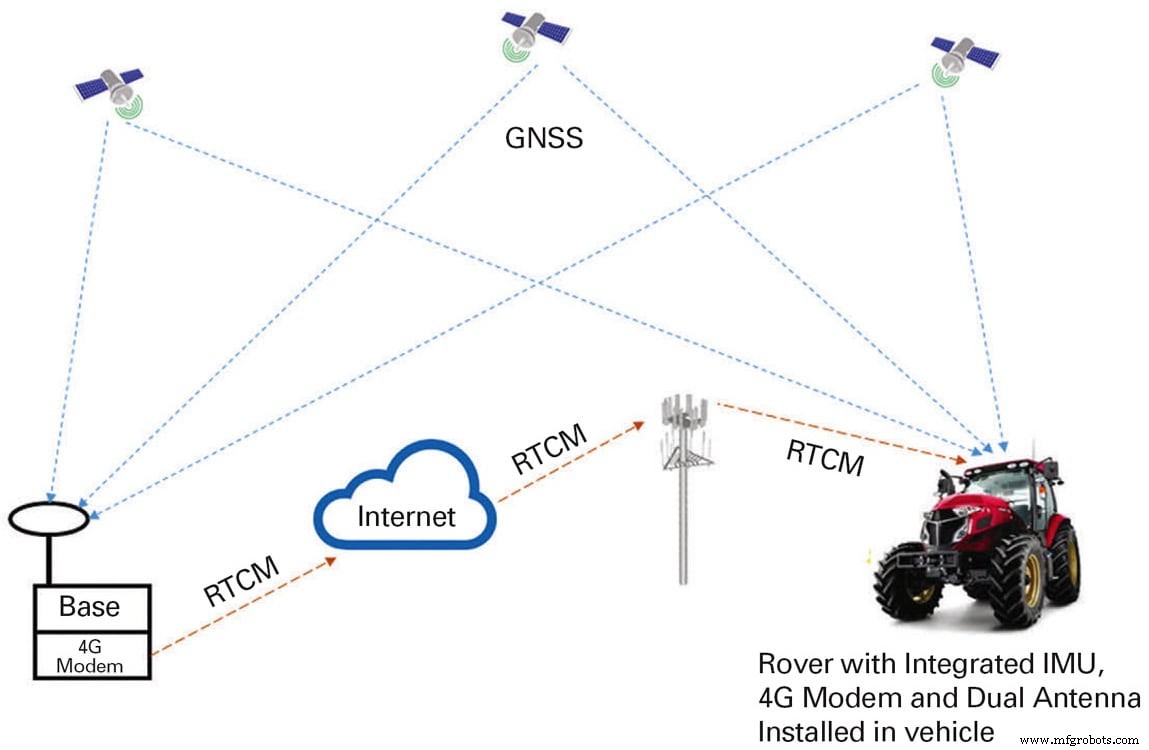
Real-Time Kinematics (RTK) adalah teknik untuk meningkatkan akurasi posisi penerima GNSS. Ini menggunakan jaringan stasiun pangkalan yang dapat mengirim koreksi ke mesin pemosisian RTK yang dipasang di kendaraan kami, yang menggunakannya untuk menghitung ulang posisinya dengan lebih akurat.
RTK adalah layanan yang dapat Anda beli atau berlangganan dari banyak sumber. Apa yang kami lihat semakin banyak adalah infrastruktur komunikasi — bahkan penyedia layanan telekomunikasi seperti Verizon, Softbank, atau China Mobile — telah mulai menawarkan layanan RTK. Dari perspektif produk kami, kami agnostik terhadap penyedia layanan — kami bermaksud untuk mendukung setiap dan setiap penyedia layanan RTK tersebut untuk membantu pelanggan kami mencapai batas akurasi yang mereka cari. Kami memberikan solusi baik perangkat keras maupun perangkat lunak.
Meskipun kami tidak menyediakan layanan, kami memungkinkan pelanggan kami untuk memilih salah satu yang paling cocok untuk mereka. Namun, kami melakukan kualifikasi layanan tersebut terlebih dahulu. Kami memastikan bahwa mereka kompatibel dengan perangkat keras dan perangkat lunak kami. Dan kemudian kami memasangnya di situs web kami untuk memberi pelanggan fleksibilitas untuk memilih dari daftar penyedia layanan. Paling umum, RTK hadir sebagai layanan melalui jaringan 4G LTE. Jika tidak ada penerimaan 4G LTE, ada cara alternatif untuk menerima sinyal koreksi, seperti komunikasi berbasis satelit.
Untuk RTK, Anda menempatkan BTS di seluruh jaringan:ada aturan praktis yang biasanya Anda menempatkan BTS pada radius 50 mil. Stasiun pangkalan ini diposisikan sehingga lokasinya diketahui dengan sangat akurat. Koreksi dihasilkan dengan mengukur kesalahan antara sinyal GNSS dan lokasi stasiun pangkalan yang diketahui secara akurat.
Jadi, kami memiliki solusi yang komprehensif:Sistem navigasi inersia yang mencakup IMU kinerja tinggi tiga tingkat redundan enam derajat kebebasan digabungkan dengan penerima GNSS frekuensi ganda, dalam dua faktor bentuk yang berbeda. Salah satunya adalah faktor bentuk modul. Jika pelanggan ingin mengubahnya di Unit Kontrol Mesin (ECU) mereka sendiri, mereka dapat melakukannya, atau jika tidak, mereka dapat menggunakan solusi plug and play paket kami. Pada dasarnya, Anda cukup menghubungkan antena GPS/GNSS, dan sistem akan berjalan di CAN bus atau Ethernet.
Artikel ini ditulis oleh Ed Brown, Editor Teknologi Sensor. Untuk informasi lebih lanjut, kunjungi di sini .


