Protokol Komunikasi:Meninjau Opsi untuk Aplikasi Encoder
Artikel ini membahas penggunaan encoder untuk memastikan pelacakan berkelanjutan yang akurat dari poros rotor motor dan faktor kunci yang akan membantu dalam pemilihan encoder berdasarkan parameter yang berbeda.
Meningkatnya penggunaan motor dalam robotika, penggerak industri, sistem otomasi pabrik, lokasi pembangkit energi terbarukan, dan sebagainya, dikombinasikan dengan meningkatnya kebutuhan akan operasi yang lebih hemat daya, telah menyebabkan peningkatan besar dalam penggunaan rotary encoder dalam beberapa tahun terakhir. Dalam laporan terbaru Insight Partners tentang hal ini, firma analis memperkirakan bahwa pasar encoder secara keseluruhan akan mengalami tingkat pertumbuhan tahunan gabungan (CAGR) 10,2% dalam angka pendapatannya di seluruh dunia antara sekarang dan 2027. Akibatnya, diharapkan pasar ini akan bernilai $3,45 miliar per tahun pada akhir periode itu.
Untuk memaksimalkan tingkat efisiensi operasional motor, diperlukan pelacakan berkelanjutan yang akurat dari poros rotornya. Ini akan memungkinkan data konstan diperoleh pada posisi rotor, ditambah kecepatan dan arah gerakannya. Fungsi tersebut dapat dicapai dengan memasukkan beberapa bentuk encoder dalam desain sistem. Namun, sebelum memutuskan sifat pembuat enkode yang akan ditentukan, Anda perlu memahami faktor-faktor kunci yang akan memengaruhi keputusan ini berdasarkan serangkaian persyaratan aplikasi atau logistik.
Absolute atau Incremental?
Ada beberapa kemungkinan opsi yang tersedia saat memilih pembuat enkode. Jenis inkremental akan membantu menentukan posisi relatif terhadap titik referensi, sedangkan encoder absolut memberikan kode unik untuk setiap posisi rotor potensial (Gambar 1).
Meskipun encoder inkremental lebih murah dan mudah diimplementasikan, encoder absolut memiliki keunggulan operasional yang jelas terkait dengan encoder tersebut. Keuntungan paling menonjol dari menggunakan encoder absolut adalah kenyataan bahwa mereka memiliki respons langsung (karena mereka hanya perlu mengidentifikasi kode spesifik). Melalui penggunaannya, posisi rotor dapat ditentukan segera setelah sistem diaktifkan. Ini sangat menguntungkan dalam skenario aplikasi yang kritis terhadap keselamatan.
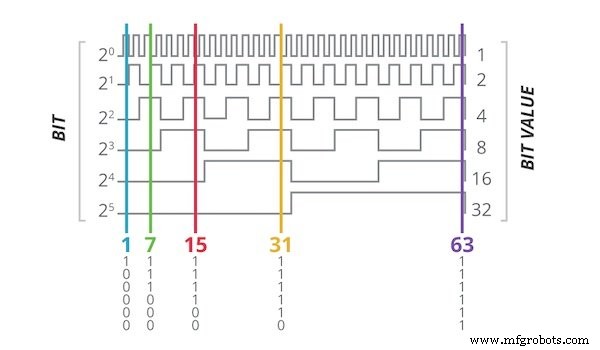
Gambar 1. Setiap posisi rotor potensial pada encoder absolut memiliki kode unik
Jenis Encoder Mana yang Harus Digunakan?
Ada juga beberapa cara yang berbeda melalui mekanisme pengkodean yang dapat diterapkan. Seringkali, penginderaan optik digunakan. Namun, ini memiliki kelemahan tertentu, terutama di lingkungan industri tugas berat - karena adanya kotoran, gemuk, atau oli dapat mengaburkan bagian dari disk enkoder, sehingga menyulitkan sensor foto yang menyertainya untuk mendapatkan hasil yang benar. Paparan guncangan atau getaran yang berkelanjutan juga dapat menyebabkan disk menjadi rusak dan perlu diganti. Penyelarasan yang tepat juga diperlukan, yang dapat menjadi proses berulang dan memakan waktu.
Meskipun encoder magnetik menghilangkan masalah line-of-sight yang merusak encoder optik, ini memiliki kekurangannya sendiri. Mereka relatif haus kekuasaan dan tidak mampu mendukung resolusi tinggi. Karena alasan inilah encoder absolut kapasitif, seperti yang ditampilkan dalam Seri AMT Perangkat CUI, sekarang banyak digunakan. Encoder kapasitif ini tahan terhadap debu, kotoran, dan lemak.
Selain itu, mereka memiliki ketahanan yang kuat terhadap getaran dan suhu ekstrem. Mereka menawarkan keandalan yang berkelanjutan, dengan masa kerja yang panjang dan bebas masalah - karena, tidak seperti encoder optik, encoder ini kurang rentan terhadap keausan mekanis. Pada saat yang sama, mereka dapat memberikan tingkat akurasi yang jauh lebih tinggi daripada ekuivalen magnetiknya (Gambar 2).
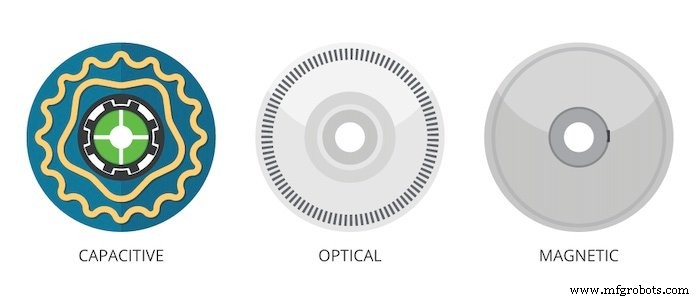
Gambar 2. Perbandingan disk encoder untuk encoder kapasitif, optik, dan magnetik
Mengintegrasikan Encoder
Setelah memutuskan mekanisme encoder, elemen berikutnya yang perlu ditangani adalah antarmuka encoder dengan sistem host. Ada berbagai macam protokol antarmuka yang dapat digunakan. Oleh karena itu penting untuk memahami perbedaan di antara mereka untuk memilih opsi yang paling tepat.
Antarmuka serial biasanya digunakan untuk komunikasi dalam sistem industri. RS-485, antarmuka periferal serial (SPI), dan antarmuka serial sinkron (SSI) adalah di antara yang paling menonjol dari protokol ini.
SPI menyediakan antarmuka dua arah yang mampu mendukung operasi dupleks penuh. Karena ada banyak unit mikrokontroler host (MCU) yang memiliki port SPI yang langsung tergabung, ini adalah cara yang mudah untuk menerapkan sistem encoder - menghabiskan waktu dan tenaga yang minimal. Kecepatan data yang ditingkatkan dapat didukung, dan juga mudah untuk menyesuaikan kecepatan ini.
Penggunaan SPI akan optimal bila jarak interkoneksi yang terlibat relatif pendek (idealnya di bawah satu meter). Jarak yang lebih jauh dapat diakomodasi, tetapi perlu untuk mengurangi kecepatan data untuk mempertahankan kekebalan kebisingan yang dapat diterima. Seri AMT22 Perangkat CUI adalah salah satu encoder SPI tersebut, dengan kecepatan clock maksimum 2 MHz. Ketika diminta, encoder dapat memberikan umpan balik posisi yang sangat cepat, dalam 1500 ns, ke mikrokontroler host. Perintah yang diperluas juga dapat digunakan melalui koneksi SPI untuk menyetel titik nol atau menyetel ulang pembuat enkode.
Gambar 3. Contoh konfigurasi SPI dengan sinyal clock bersama, MOSI, dan MISO serta jalur pemilihan chip yang unik
Lebih cocok untuk jarak interkoneksi yang lebih jauh daripada SPI, atau untuk digunakan dalam situasi di mana terdapat gangguan listrik yang substansial, RS-485 adalah pilihan lain. Karena ini adalah protokol antarmuka asinkron, tidak memerlukan sinyal clock. Pensinyalan diferensialnya memungkinkan penolakan kebisingan mode umum dan kekebalan kebisingan yang kuat yang ditawarkan berarti dapat digunakan di lingkungan yang sangat menantang di mana interferensi elektromagnetik (EMI) lazim.
Tidak seperti SPI, tidak perlu mengekang kecepatan data saat jarak diperpanjang. Dengan transceiver RS-485 khusus, kecepatan komunikasi dapat mencapai 10 Mbps atau lebih tinggi, tergantung pada jarak yang dibutuhkan data untuk melakukan perjalanan melalui kabel pasangan terpilin. Kabel kemudian diterminasi pada setiap ujungnya dengan resistansi yang sama dengan impedansi karakteristik.
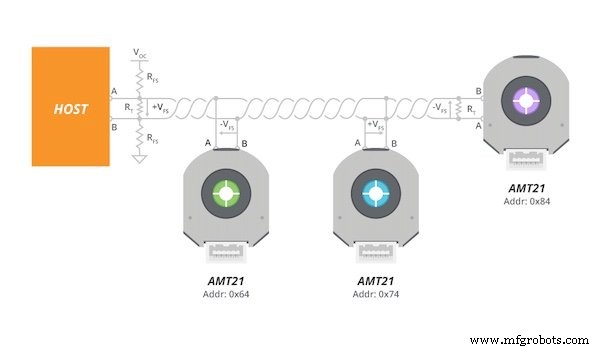
Manfaat utama lain dari RS-485 adalah beberapa encoder semuanya dapat dihubungkan ke satu bus (Gambar 4). Untuk implementasi berdasarkan teknologi RS-485, encoder AMT21 memberikan solusi. Protokol standarnya yang terdiri dari delapan bit data, tanpa paritas, dan satu bit berhenti bekerja dengan meminta dua bit yang lebih rendah menentukan perintah encoder dengan 6 bit lainnya digunakan sebagai alamat encoder. Ini berarti bahwa hingga 64 pembuat enkode dapat berbagi bus yang sama — memberikan keuntungan dalam implementasi skala besar yang kompleks. Encoder AMT21 juga dapat menanggapi permintaan pemosisian dari host dalam jangka waktu 3.
Gambar 4. Contoh konfigurasi RS-485 yang menampilkan beberapa encoder yang terhubung ke host
Data yang diangkut melalui SSI disinkronkan oleh pemancar dan penerima, keduanya merujuk pada sinyal clock yang sama. Protokol komunikasi satu arah simpleks ini bergantung pada pensinyalan diferensial dan menghadirkan solusi antarmuka yang sangat hemat biaya. Ini dapat menangani panjang interkoneksi yang serupa dengan SPI dan juga memiliki karakteristik kinerja noise yang sebanding.
Seri AMT23 Perangkat CUI menawarkan solusi dalam situasi di mana SSI adalah antarmuka yang dipilih. Variasi Perangkat CUI dari protokol SSI standar hadir dengan antarmuka SSI tiga kabel yang menggabungkan koneksi pilihan chip, yang menyederhanakan pemasangan dan menyederhanakan antarmuka antara host dan encoder. Fitur chip-select memungkinkan host untuk mengaktifkan encoder individual tertentu di bus, sementara encoder merespons hanya dengan meletakkan data posisi di bus.
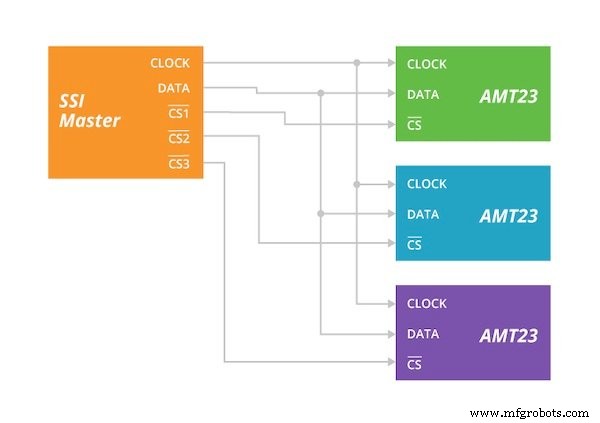
Gambar 5. Konfigurasi SSI tiga kabel dengan fitur pemilihan chip
Kesimpulan
Melalui portofolio luas enkoder absolut kapasitif yang disediakan oleh Perangkat CUI, dan rangkaian teknologi antarmuka yang didukung unit ini, para insinyur akan dapat menemukan solusi yang sesuai dengan persyaratan aplikasi khusus mereka. Dalam situasi di mana mungkin ada jarak koneksi yang panjang atau tingkat kebisingan perlu dikurangi, akan disarankan untuk menggunakan antarmuka RS-485.
Jika implementasi langsung adalah prioritas, maka encoder dengan fungsionalitas antarmuka SPI adalah pilihan yang baik. Ini didukung oleh fakta bahwa itu didukung oleh MCU dari banyak vendor semikonduktor yang berbeda. Ketika penyebaran sistem harus sesederhana mungkin, dengan biaya yang ditekan seminimal mungkin dan sangat sedikit ruang yang digunakan, maka SSI mungkin adalah cara yang harus dilakukan.
Artikel Industri adalah bentuk konten yang memungkinkan mitra industri untuk berbagi berita, pesan, dan teknologi yang bermanfaat dengan pembaca All About Circuits dengan cara yang tidak sesuai dengan konten editorial. Semua Artikel Industri tunduk pada pedoman editorial yang ketat dengan tujuan menawarkan kepada pembaca berita, keahlian teknis, atau cerita yang bermanfaat. Sudut pandang dan pendapat yang diungkapkan dalam Artikel Industri adalah milik mitra dan belum tentu milik All About Circuits atau penulisnya.


