Panduan Utama untuk Positioner untuk Aplikasi Robot
Menurut Anda, mungkin Anda memerlukan pengatur posisi robot? Mana yang terbaik untuk Anda?
Ada banyak pilihan positioner yang tersedia, dengan berbagai sumbu, muatan, dan konfigurasi. Bagaimana Anda mengetahui positioner mana yang sesuai dengan kebutuhan aplikasi Anda?
Berikut adalah ikhtisar tentang positioner robot — apa itu dan apa yang perlu Anda ketahui.
Cukup sulit untuk memilih robot industri yang tepat untuk aplikasi Anda. Anda mungkin melihat lusinan model robot yang berbeda sebelum menemukan yang terbaik untuk kebutuhan Anda, melihat jangkauan robot terbaik, muatan terbaik, merek terbaik.
Tepat ketika Anda berpikir bahwa semua keputusan Anda telah selesai dan Anda dapat mulai mengotomatiskan proses Anda, keputusan baru muncul:Apakah saya memerlukan pengatur posisi robot?
Jika Anda bekerja dengan integrator robot berpengalaman, godaan Anda mungkin adalah membiarkan mereka memutuskan untuk Anda. Keahlian mereka tentu akan penting untuk membantu Anda membuat pilihan yang tepat. Namun, ada baiknya Anda mengetahui sendiri seluk beluk positioner robot.
Ketika digunakan dengan benar, positioner dapat meningkatkan kemampuan lengan robot secara signifikan. Dengan sedikit pengetahuan saja, Anda dapat memastikan bahwa Anda mendapatkan hasil maksimal dari aplikasi robot Anda.
Artikel ini memberikan panduan menyeluruh untuk pemosisi robot, memberi Anda informasi yang cukup untuk membuat keputusan yang tepat.
Apa itu Pemosisi Robot?
Positioner robot (alias positioner benda kerja) adalah mekanisme yang dapat diprogram dengan satu atau lebih sumbu yang bekerja bersama dengan robot industri untuk memperluas kemampuan robot. Benda kerja dipasang ke pengatur posisi robot dan dapat dikontrol secara independen dari robot, sehingga meningkatkan fleksibilitasnya.
Positioner benda kerja tersedia dalam berbagai ukuran, jenis, dan konfigurasi. Mulai dari yang paling sederhana, meja putar satu sumbu hingga kombinasi paling kompleks yang disesuaikan dari beberapa sumbu yang dapat diprogram.
Tujuan dasar dari positioner benda kerja adalah untuk memperluas ruang kerja robot. Ini membuatnya mirip dengan sumbu bantu lainnya di mana robot itu sendiri dipasang ke trek linier, trek melengkung, atau gantry crane. Namun, tidak seperti sumbu bantu ini, benda kerja itu sendiri adalah bagian yang bergerak, bukan robot. Untuk panduan menggunakan pemrograman offline dengan sumbu bantu apa pun, lihat artikel kami sebelumnya.
Apakah Aplikasi Anda Tepat untuk Robotic Positioner?
Hal pertama yang ingin Anda tentukan saat mempertimbangkan positioner adalah apakah aplikasi Anda cocok. Banyak aplikasi robot tidak memerlukan derajat kebebasan ekstra (DoF) dan dapat dicapai dengan robot saja.
Tempat yang baik untuk mulai memikirkan hal ini adalah dengan bertanya:“Apakah saat ini saya sedang dibatasi dalam aplikasi ini oleh ruang kerja robot?”
Jika demikian, ada baiknya melihat apakah positioner (atau sumbu bantu lainnya) mungkin cocok untuk Anda.
Mungkin aplikasi yang paling umum di mana positioner secara rutin digunakan adalah pengelasan robot dan pemesinan robot. Dalam tugas ini, semua 6 DoF robot itu sendiri digunakan untuk memposisikan alat dengan tepat. Tidak ada banyak waktu untuk mendekati benda kerja dari orientasi yang berbeda. Akibatnya, positioner sering kali diperlukan saat mengelas atau memproses bagian dengan geometri yang lebih kompleks.
Tugas umum lainnya termasuk pengecatan, pelapisan, dan inspeksi.
3 Manfaat yang Kurang Jelas dari Menggunakan Positioner Robotik
Memperluas ruang kerja robot tentu saja merupakan alasan kuat untuk memilih positioner. Namun, ada juga manfaat lain yang sedikit kurang jelas:
- Proses bersamaan — Beberapa pengatur posisi memungkinkan beberapa benda kerja dipasang pada sisi yang berlawanan. Hal ini memungkinkan dua atau lebih operasi dilakukan secara bersamaan dengan beberapa robot, seperti dalam contoh dari ABB ini.
- Jejak kaki lebih kecil — Meskipun berlawanan dengan intuisi, pengatur posisi sebenarnya dapat mengurangi jumlah ruang lantai yang digunakan sel robot dibandingkan dengan, katakanlah, menggunakan jenis sumbu bantu lain dengan benda kerja diletakkan di atas bangku.
- Kapasitas beban tinggi — Beberapa pengatur posisi dapat menangani benda kerja yang besar dan berat. Apa pun tugas Anda, kemungkinan besar ada pengatur posisi yang dapat menangani beban tersebut.
5 Jenis Pemosisi Robotik Umum
Ada banyak jenis positioner robot, tetapi berikut adalah yang paling umum:
1. Meja putar
Jenis positioner yang paling dasar, turntable duduk di lantai atau meja kerja dan memutar benda kerja di sekitar satu sumbu saja (sumbu vertikal). Mereka biasanya digunakan dalam penggilingan robot, seperti yang kita lihat dalam proyek Protolab dengan RoboDK (meja putar tidak terlihat bergerak dalam video ini).
2. Pemosisi Sumbu Tunggal
Meja putar hanyalah tipe tertentu dari pengatur posisi rotasi sumbu tunggal. Namun, positioner sumbu tunggal ada untuk hampir semua orientasi. Yang paling umum memutar benda kerja di sekitar sumbu horizontal dengan cara yang mirip dengan mesin bubut.
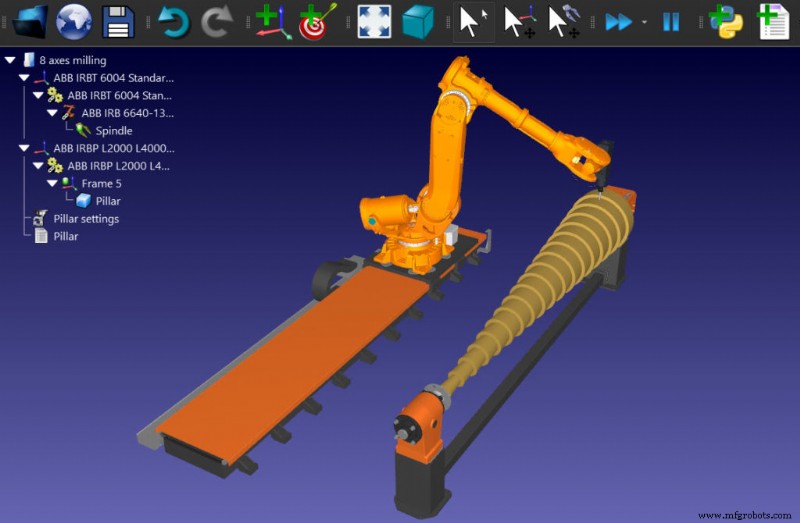
3. Headstock dan Tailstock
Jika benda kerja Anda terlalu panjang atau terlalu berat untuk satu pengatur posisi, pendekatan yang umum adalah menggabungkan dua pengatur posisi sumbu tunggal, dengan satu ditempelkan di setiap ujung benda kerja (dikenal sebagai headstock dan tailstock). Kontrol disinkronkan sehingga mudah diprogram sebagai pengatur posisi tunggal.
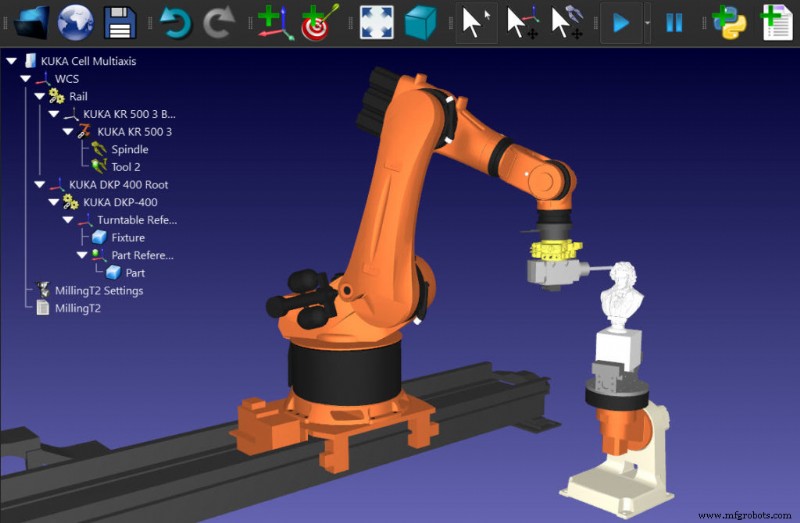
4. Positioner multi-sumbu
Di sinilah menjadi kompleks. Anda dapat menemukan positioner di hampir semua konfigurasi dan orientasi. Yang paling sederhana menggabungkan dua sumbu yang dapat diprogram pada positioner yang sama, yang paling kompleks dapat disesuaikan dengan hampir sebanyak sumbu yang Anda inginkan.
5. Pemosisi 3-Sumbu (Kincir Ria)
Jenis positioner multi-sumbu yang sangat umum adalah "kincir ria." Ini termasuk 3 sumbu yang dapat diprogram yang bekerja secara independen. Untuk beroperasi dengan benar, mereka harus diseimbangkan dengan memiliki bobot yang sama di kedua sisi, yang biasanya berarti dua jenis benda kerja yang sama.
Cara Memilih Pemosisi Robot Terbaik untuk Anda
Positioner terbaik untuk Anda akan bergantung pada kebutuhan aplikasi Anda.
Anda akan ingin mempertimbangkan pertanyaan seperti:
- Berapa banyak ruang yang kita miliki untuk memuat robot dan pengatur posisi?
- Apa geometri benda kerja kita?
- Apakah benda kerja terlalu besar atau berat untuk satu pengatur posisi?
- Gaya positioner apa yang paling masuk akal?
- Berapa muatan yang dibutuhkan positioner?
Setelah Anda menentukan jenis positioner terbaik, lihat berbagai produsen positioner robot untuk menemukan model yang sesuai.
RoboDK sudah menyertakan banyak positioner dari ABB dan KUKA di Perpustakaan Robot kami. Namun, ada lebih banyak penyedia positioner yang dengan senang hati akan kami integrasikan ke RoboDK berdasarkan permintaan.
Anda juga dapat membuat positionner Anda sendiri dan menyinkronkannya dengan robot Anda. Dengan perangkat lunak RoboDK, Anda juga dapat mengoptimalkan gerakan sumbu eksternal sesuai dengan pengaturan pilihan Anda.
Tugas apa yang menurut Anda akan mendapat manfaat dari positioner robot? Beri tahu kami di komentar di bawah atau bergabunglah dalam diskusi di LinkedIn, Twitter, Facebook, Instagram, atau di Forum RoboDK.


