

Teknologi Industri

Manufaktur industri
Sama seperti perangkat telah dibuat untuk mengukur kuantitas fisik tertentu dan mengulangi informasi itu dalam bentuk sinyal listrik DC (termokopel, pengukur regangan, probe pH, dll.), perangkat khusus telah dibuat yang melakukan hal yang sama dengan AC.
Seringkali diperlukan untuk dapat mendeteksi dan mengirimkan posisi fisik bagian mekanis melalui sinyal listrik. Hal ini terutama berlaku di bidang kontrol perkakas mesin otomatis dan robotika. Cara sederhana dan mudah untuk melakukannya adalah dengan potensiometer:
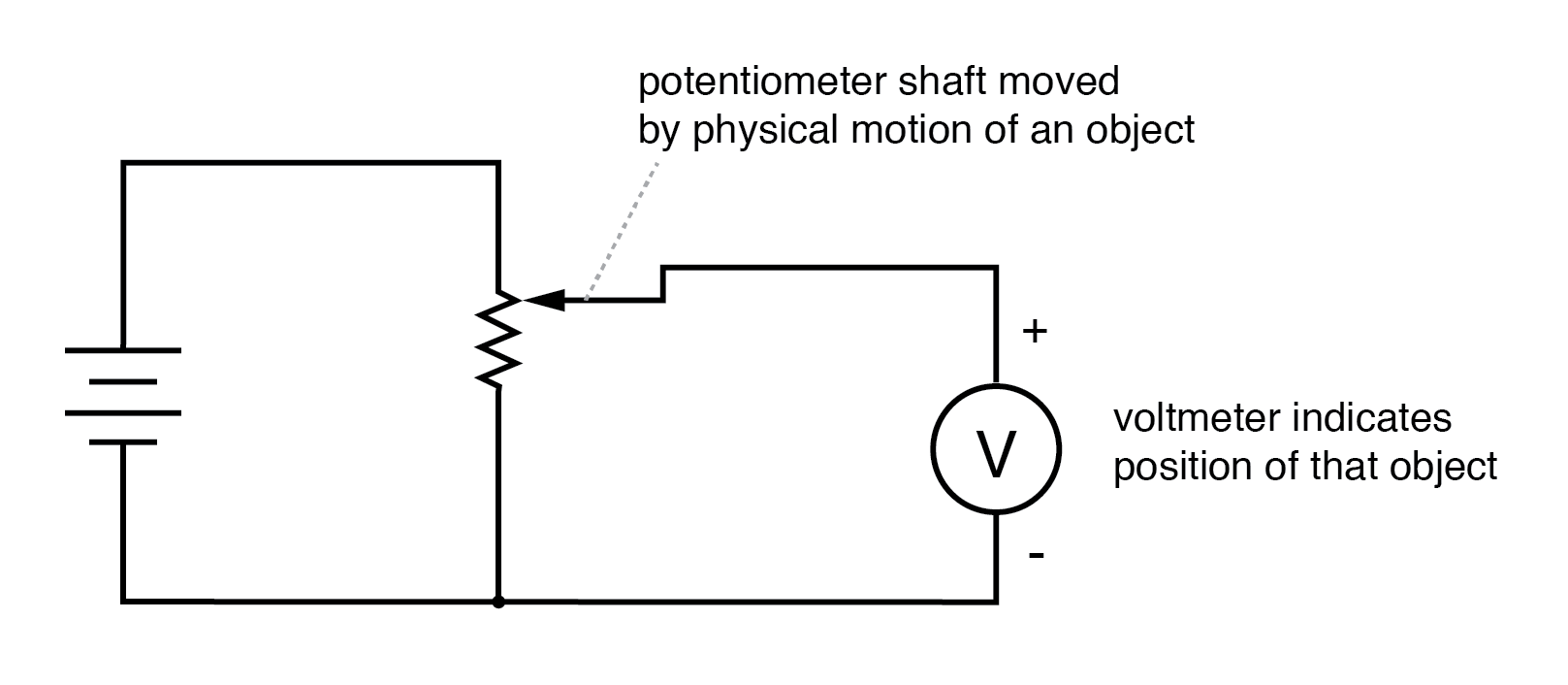
Tegangan ketukan potensiometer menunjukkan posisi objek yang dipasang pada poros.
Namun, potensiometer memiliki masalah uniknya sendiri. Pertama, mereka mengandalkan kontak fisik antara "wiper" dan strip resistensi, yang berarti mereka mengalami efek dari keausan fisik dari waktu ke waktu.
Saat potensiometer aus, output proporsionalnya versus posisi poros menjadi semakin tidak pasti. Anda mungkin pernah mengalami efek ini saat menyesuaikan kontrol volume di radio lama:saat memutar kenop, Anda mungkin mendengar suara "goresan" yang keluar dari speaker.
Suara-suara tersebut adalah hasil dari kontak wiper yang buruk di potensiometer kontrol volume.
Selain itu, kontak fisik antara wiper dan strip ini menciptakan kemungkinan busur api (sparking) di antara keduanya saat wiper dipindahkan.
Dengan sebagian besar rangkaian potensiometer, arusnya sangat rendah sehingga lengkung wiper dapat diabaikan, tetapi kemungkinan ini dapat dipertimbangkan.
Jika potensiometer akan dioperasikan di lingkungan di mana terdapat uap atau debu yang mudah terbakar, potensi lengkung ini diterjemahkan menjadi potensi ledakan!
Dengan menggunakan AC, bukan DC, kita dapat sepenuhnya menghindari kontak geser antar bagian jika kita menggunakan trafo variabel sebagai pengganti potensiometer.
Perangkat yang dibuat untuk tujuan ini disebut LVDT, yang merupakan singkatan dari L inear V ariable D T yang berbeda penerobos. Desain LVDT terlihat seperti ini:
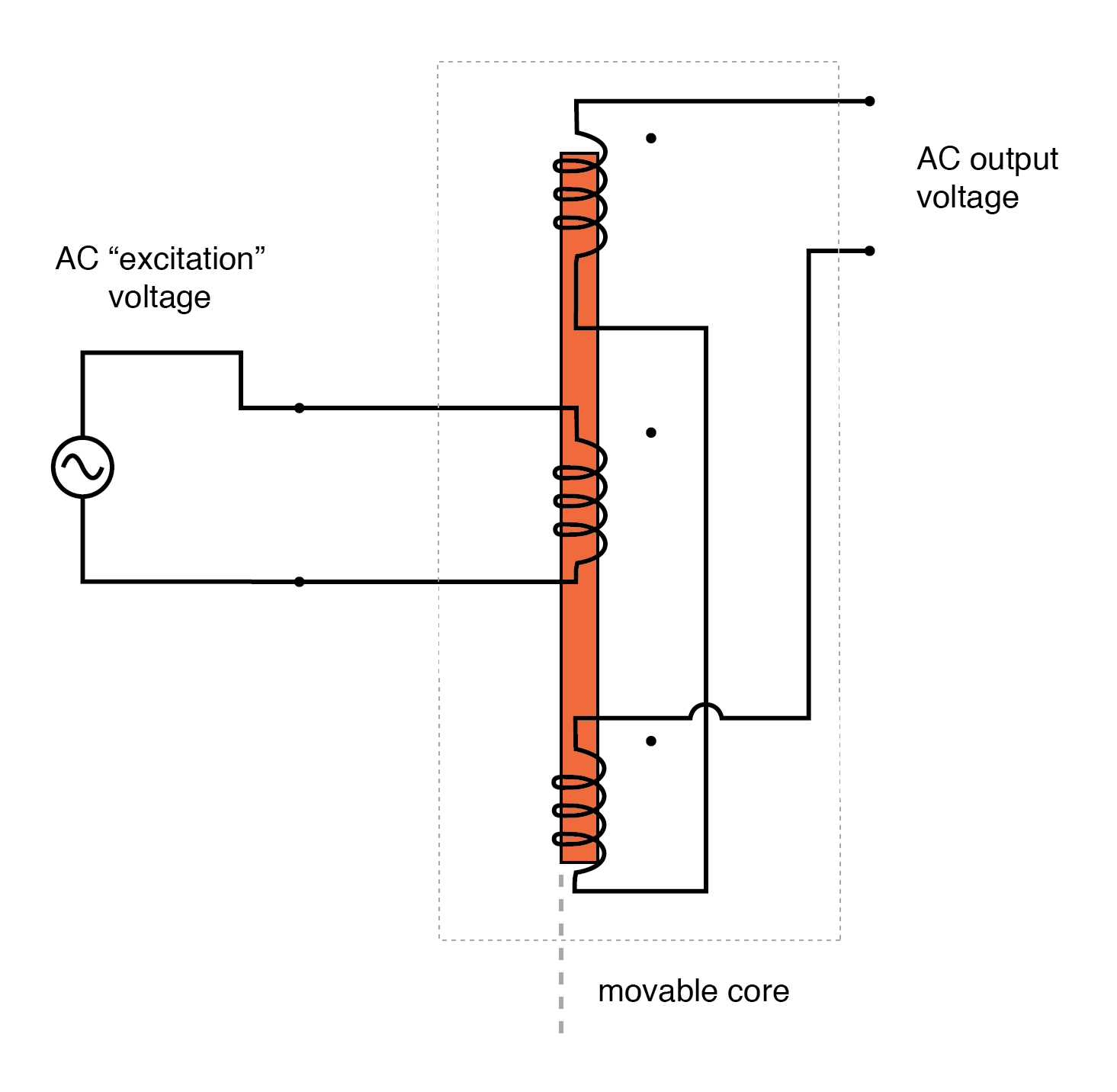
Output AC dari transformator diferensial variabel linier (LVDT) menunjukkan posisi inti.
Jelas, perangkat ini adalah transformator :memiliki satu belitan primer yang ditenagai oleh sumber tegangan AC eksternal, dan dua belitan sekunder yang dihubungkan secara seri-bucking.
Ini adalah variabel karena inti bebas bergerak di antara belitan. Ini adalah diferensial karena cara dua gulungan sekunder terhubung. Disusun untuk menentang satu sama lain (180 ° di luar fase) berarti bahwa output perangkat ini akan menjadi perbedaan antara tegangan keluaran dari dua gulungan sekunder.
Ketika inti dipusatkan dan kedua belitan mengeluarkan tegangan yang sama, hasil bersih pada terminal keluaran akan menjadi nol volt. Ini disebut linier karena kebebasan gerak inti adalah garis lurus.
Output tegangan AC oleh LVDT menunjukkan posisi inti bergerak. Nol volt berarti inti berada di tengah.
Semakin jauh inti dari posisi tengah, semakin besar persentase tegangan input ("eksitasi") yang akan terlihat pada output. Fase tegangan keluaran relatif terhadap tegangan eksitasi menunjukkan arah mana dari pusat inti yang diimbangi.
Keuntungan utama LVDT dibandingkan potensiometer untuk penginderaan posisi adalah tidak adanya kontak fisik antara bagian yang bergerak dan yang tidak bergerak.
Inti tidak menyentuh gulungan kawat, tetapi meluncur masuk dan keluar di dalam tabung nonkonduktor. Dengan demikian, LVDT tidak “mengaus” seperti potensiometer, juga tidak ada kemungkinan untuk membuat busur.
Eksitasi LVDT biasanya 10 volt RMS atau kurang, pada frekuensi mulai dari saluran listrik hingga rentang audio tinggi (20 kHz). Salah satu kelemahan potensial dari LVDT adalah waktu responsnya, yang sebagian besar bergantung pada frekuensi sumber tegangan AC.
Jika waktu respons yang sangat cepat diinginkan, frekuensinya harus lebih tinggi untuk memungkinkan sirkuit penginderaan tegangan apa pun siklus AC yang cukup untuk menentukan level tegangan saat inti dipindahkan.
Untuk mengilustrasikan potensi masalah di sini, bayangkan skenario yang dilebih-lebihkan ini:LVDT yang ditenagai oleh sumber tegangan 60 Hz, dengan inti dipindahkan masuk dan keluar ratusan kali per detik.
Output dari LVDT ini bahkan tidak akan terlihat seperti gelombang sinus karena inti akan dipindahkan sepanjang rentang geraknya sebelum tegangan sumber AC dapat menyelesaikan satu siklus! Hampir tidak mungkin untuk menentukan posisi inti sesaat jika ia bergerak lebih cepat daripada tegangan sumber sesaat.
Variasi pada LVDT adalah RVDT, atau R otary V ariable D T yang berbeda penebus. Perangkat ini bekerja dengan prinsip yang hampir sama, kecuali bahwa inti berputar pada poros alih-alih bergerak dalam garis lurus. RVDT hanya dapat dibuat untuk sebagian gerakan 360° (lingkaran penuh).
Melanjutkan prinsip ini, kami memiliki apa yang dikenal sebagai Sinkronisasi atau Selsin , yang merupakan perangkat yang sangat mirip dengan motor atau generator AC polifase rotor belitan.
Rotor bebas berputar 360° penuh, seperti halnya motor. Pada rotor terdapat belitan tunggal yang terhubung ke sumber tegangan AC, seperti belitan primer LVDT. Gulungan stator biasanya berbentuk Y tiga fase, meskipun sinkron dengan lebih dari tiga fase telah dibangun. (Gambar di bawah)
Perangkat dengan stator dua fase dikenal sebagai resolver . Resolver menghasilkan output sinus dan cosinus yang menunjukkan posisi poros.
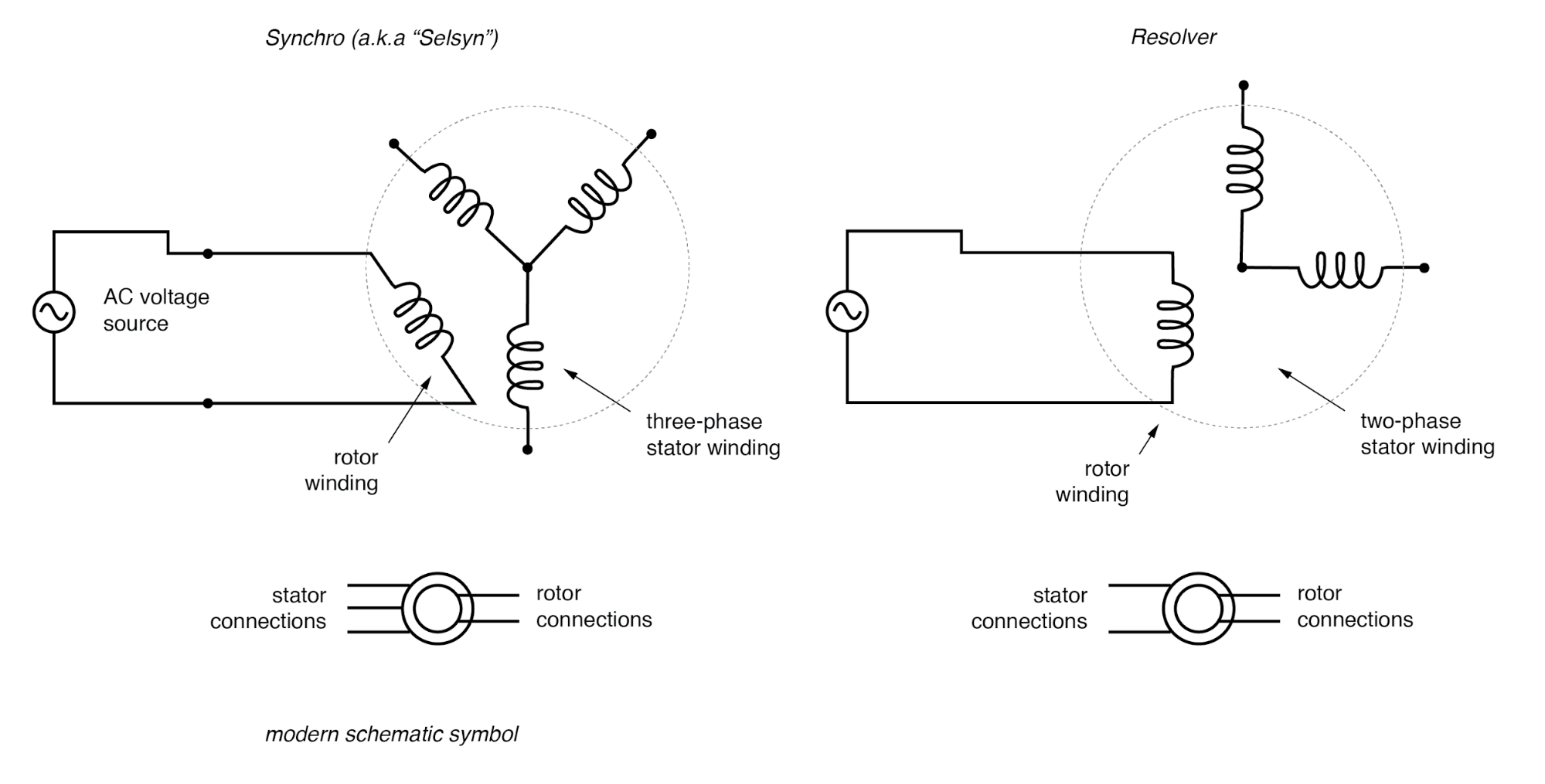
Sinkronisasi dililit dengan belitan stator tiga fase, dan medan putar. Resolver memiliki stator dua fase.
Tegangan induksi pada belitan stator dari eksitasi AC rotor tidak fase-digeser oleh 120 ° seperti pada generator tiga fase nyata. Jika rotor diberi energi dengan arus DC daripada AC dan poros berputar terus menerus, maka tegangan akan menjadi benar tiga fase.
Tapi ini bukan bagaimana sebuah sinkronisasi dirancang untuk dioperasikan. Sebaliknya, ini adalah penginderaan posisi perangkat seperti RVDT, kecuali bahwa sinyal outputnya jauh lebih pasti. Dengan rotor diberi energi oleh AC, tegangan belitan stator akan sebanding besarnya dengan posisi sudut rotor, fase baik bergeser 0° atau 180°, seperti LVDT atau RVDT biasa.
Anda dapat menganggapnya sebagai transformator dengan satu gulungan primer dan tiga gulungan sekunder, masing-masing gulungan sekunder berorientasi pada sudut yang unik.
Saat rotor diputar perlahan, setiap belitan pada gilirannya akan sejajar langsung dengan rotor, menghasilkan tegangan penuh, sedangkan belitan lainnya akan menghasilkan sesuatu yang kurang dari tegangan penuh.
Sinkronisasi sering digunakan berpasangan. Dengan rotor yang terhubung secara paralel dan diberi energi oleh sumber tegangan AC yang sama, porosnya akan menyesuaikan posisi dengan tingkat akurasi yang tinggi:
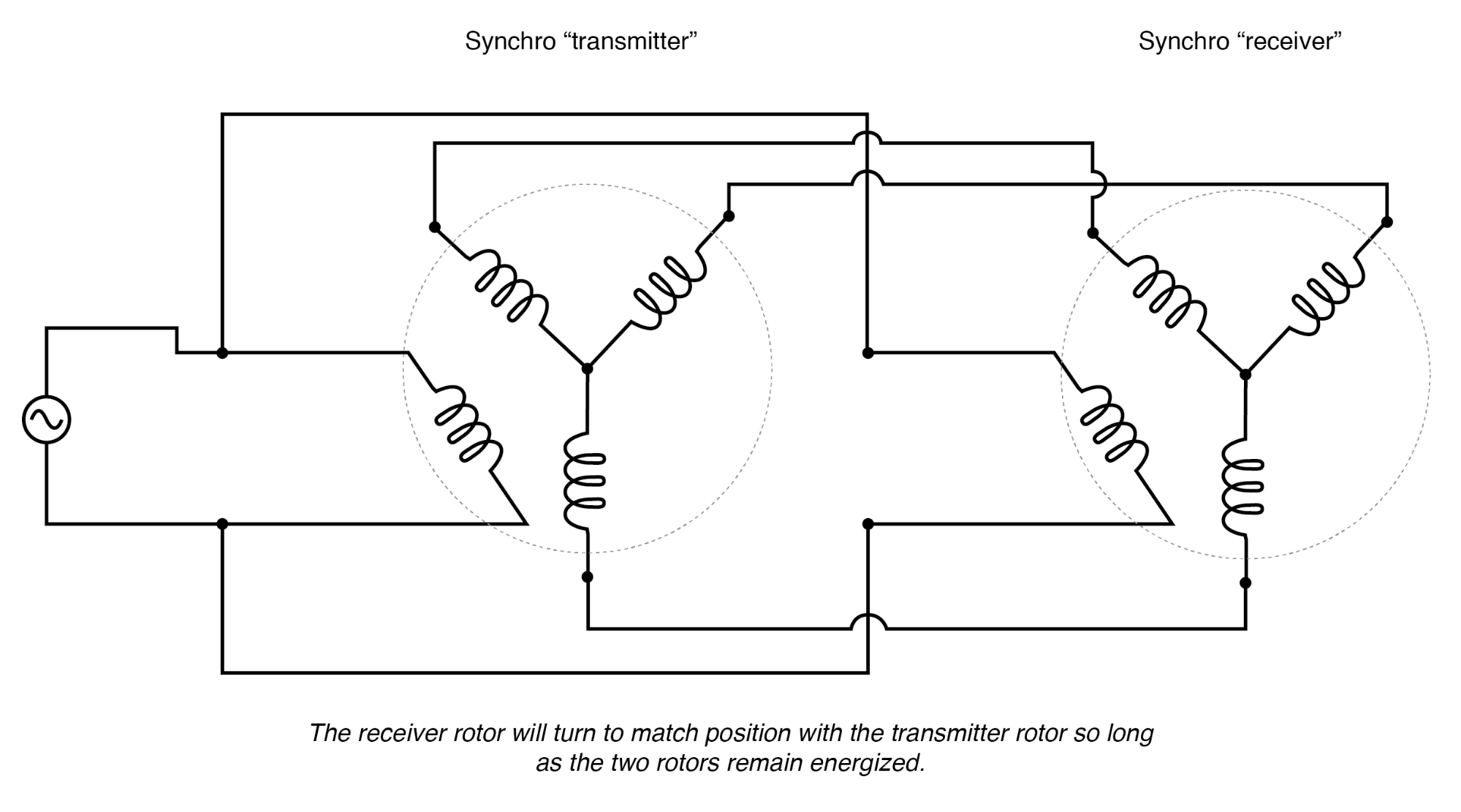
Poros sinkronisasi saling bekerja sama. Memutar yang satu akan menggerakkan yang lain.
Pasangan “pemancar/penerima” semacam itu telah digunakan di kapal untuk menyampaikan posisi kemudi, atau untuk menyampaikan posisi giro navigasi pada jarak yang cukup jauh.
Satu-satunya perbedaan antara "pemancar" dan "penerima" adalah yang mana yang diputar oleh kekuatan luar. "Penerima" dapat dengan mudah digunakan sebagai "pemancar" dengan memaksa porosnya berputar dan membiarkan sinkronisasi pada posisi kiri yang cocok.
Jika rotor penerima tidak diberi daya, rotor akan bertindak sebagai pendeteksi kesalahan posisi, menghasilkan tegangan AC pada rotor jika porosnya bergeser selain 90o atau 270o dari posisi poros pemancar.
Rotor penerima tidak akan lagi menghasilkan torsi apa pun dan akibatnya tidak lagi secara otomatis menyesuaikan posisi dengan pemancar:
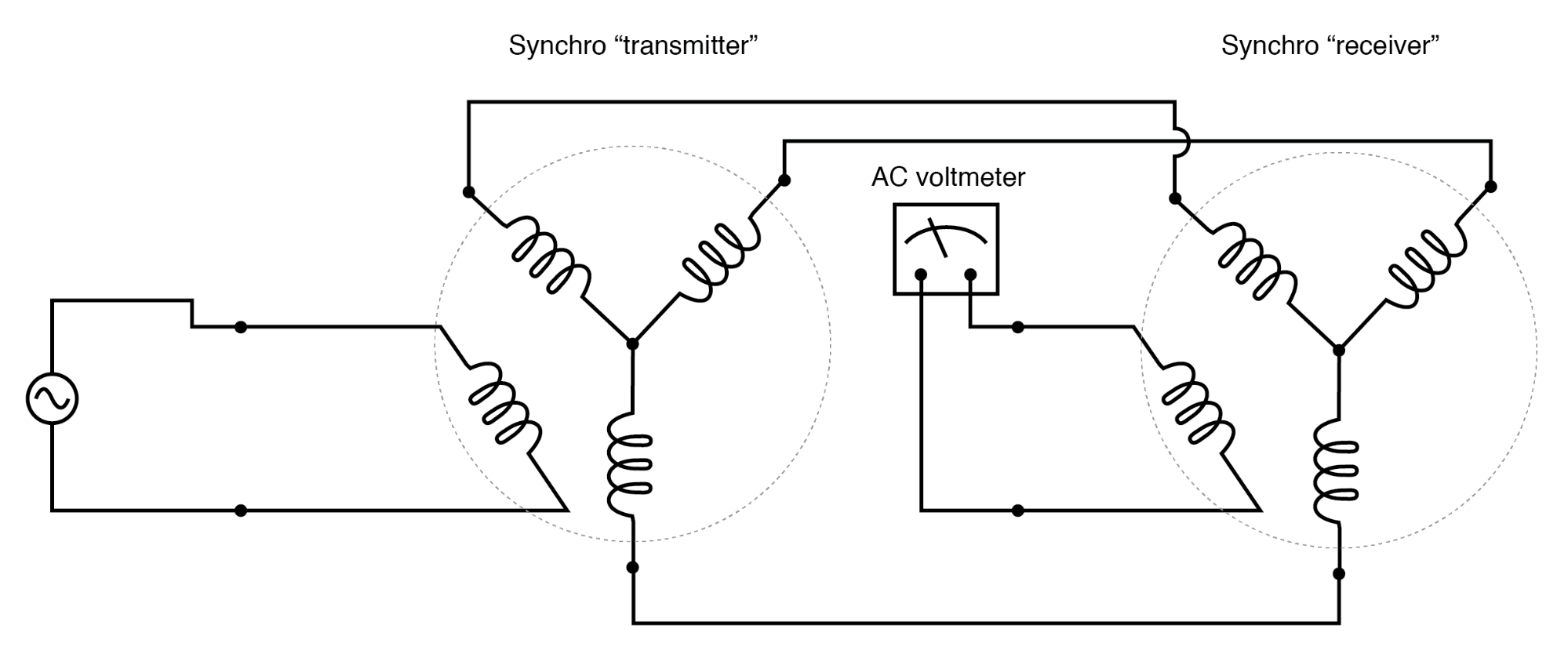
Voltmeter AC mencatat tegangan jika rotor penerima tidak diputar tepat 90 atau 270 derajat dari rotor pemancar.
Ini dapat dianggap sebagai semacam rangkaian jembatan yang mencapai keseimbangan hanya jika poros penerima dibawa ke salah satu dari dua posisi (sesuai) dengan poros pemancar.
Salah satu aplikasi sinkronisasi yang cukup cerdik adalah dalam pembuatan perangkat pemindah fase, asalkan stator diberi energi oleh AC tiga fase:
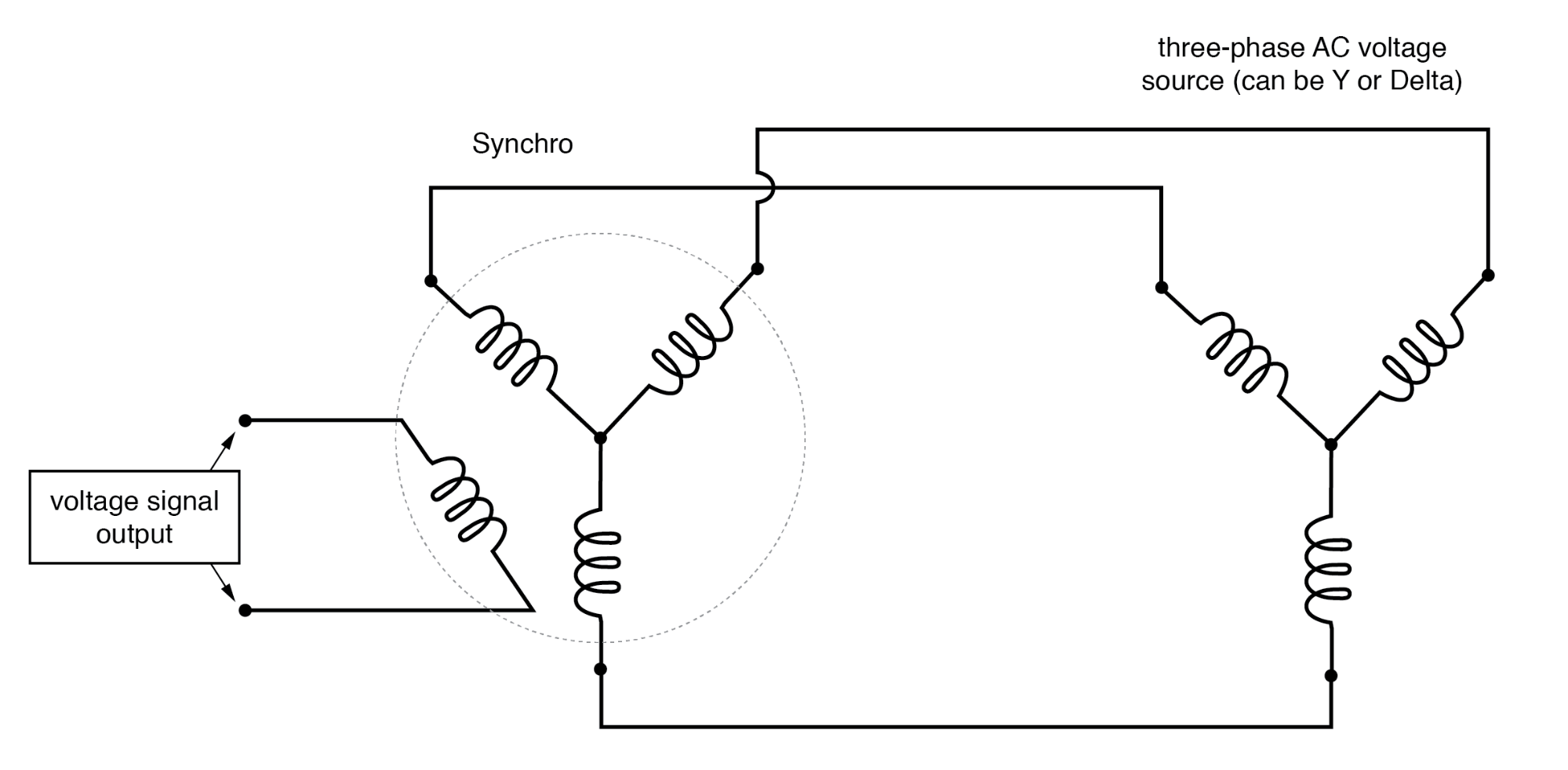
Rotor rotasi penuh akan menggeser fase dengan mulus dari 0° hingga 360° (kembali ke 0°).
Saat rotor synchro diputar, kumparan rotor akan secara progresif sejajar dengan masing-masing kumparan stator, medan magnet masing-masing bergeser fase 120° dari satu sama lain.
Di antara posisi-posisi itu, medan-medan yang mengalami pergeseran fasa ini akan bercampur untuk menghasilkan tegangan rotor di suatu tempat antara pergeseran 0 °, 120 °, atau 240 °. Hasil praktisnya adalah perangkat yang mampu memberikan tegangan AC fase variabel tak terhingga dengan memutar kenop (terpasang pada poros rotor).
Synchro atau resolver dapat mengukur gerakan linier jika diarahkan dengan mekanisme rack and pinion.
Gerakan linier beberapa inci (atau cm) yang menghasilkan beberapa putaran sinkronisasi (penyelesai) menghasilkan rangkaian gelombang sinus. Sebuah Induktosin ® adalah versi linear dari resolver. Ini mengeluarkan sinyal seperti resolver; meskipun, itu memiliki sedikit kemiripan.
Inductosyn terdiri dari dua bagian:belitan serpentin tetap yang memiliki pitch 0,1 in atau 2 mm, dan belitan bergerak yang dikenal sebagai slider . (Gambar di bawah)
Slider memiliki sepasang belitan yang memiliki nada yang sama dengan belitan tetap. Gulungan penggeser diimbangi oleh seperempat nada sehingga gelombang sinus dan kosinus dihasilkan oleh gerakan.
Satu gulungan penggeser cukup untuk menghitung pulsa, tetapi tidak memberikan informasi arah.
Gulungan 2 fase memberikan informasi arah dalam pentahapan gelombang sinus dan kosinus. Gerakan dengan satu nada menghasilkan siklus gelombang sinus dan kosinus; beberapa nada menghasilkan rangkaian gelombang.
Inductosyn:(a) Gulungan serpentin tetap, (b) belitan 2 fase penggeser yang dapat digerakkan. Diadaptasi dari Gambar 6.16 [WAK]
Ketika kita mengatakan bahwa gelombang sinus dan kosinus dihasilkan sebagai fungsi dari gerakan linier, yang kita maksud adalah pembawa frekuensi tinggi yang amplitudonya dimodulasi saat penggeser bergerak.
Dua sinyal AC penggeser harus diukur untuk menentukan posisi dalam nada, posisi halus. Berapa banyak nada yang telah dipindahkan penggeser? Hubungan sinyal sinus dan kosinus tidak mengungkapkan hal itu. Namun, jumlah pitch (jumlah gelombang) dapat dihitung dari titik awal yang diketahui menghasilkan posisi kasar.
Ini adalah pengenkode tambahan . Jika posisi absolut harus diketahui terlepas dari titik awal, resolver bantu yang diarahkan untuk satu putaran per panjang memberikan posisi kasar. Ini merupakan pengenkode mutlak .
Sebuah Inductosyn linier memiliki rasio transformator 100:1. Bandingkan ini dengan rasio 1:1 untuk resolver. Eksitasi AC beberapa volt ke dalam Inductosyn menghasilkan beberapa milivolt.
Level sinyal rendah ini diubah menjadi format digital 12-bit oleh resolver to digital converter (RDC) . Resolusi 25 mikroinci dapat dicapai.
Ada juga versi putar dari Inductosyn yang memiliki 360 pola pitch per putaran. Saat digunakan dengan resolver 12-bit ke konverter digital, resolusi 1 detik busur lebih baik dapat dicapai. Ini adalah encoder tambahan.
Menghitung pitch dari titik awal yang diketahui diperlukan untuk menentukan posisi absolut. Atau, resolver dapat menentukan posisi absolut kasar.
Sejauh ini transduser yang dibahas semuanya dari varietas induktif. Namun, dimungkinkan untuk membuat transduser yang beroperasi pada kapasitansi variabel juga, AC digunakan untuk merasakan perubahan kapasitansi dan menghasilkan tegangan keluaran variabel.
Ingatlah bahwa kapasitansi antara dua permukaan konduktif bervariasi dengan tiga faktor utama:luas permukaan yang tumpang tindih, jarak antara keduanya, dan konstanta dielektrik material di antara permukaan.
Jika dua dari tiga variabel ini dapat diperbaiki (distabilkan) dan yang ketiga dibiarkan bervariasi, maka setiap pengukuran kapasitansi antara permukaan akan semata-mata menunjukkan perubahan pada variabel ketiga tersebut.
Peneliti medis telah lama menggunakan penginderaan kapasitif untuk mendeteksi perubahan fisiologis pada tubuh makhluk hidup.
Pada awal tahun 1907, seorang peneliti Jerman bernama H. Cremer menempatkan dua pelat logam di kedua sisi jantung katak yang berdetak dan mengukur perubahan kapasitansi yang dihasilkan dari jantung yang secara bergantian mengisi dan mengosongkan darah.
Pengukuran serupa telah dilakukan pada manusia dengan pelat logam ditempatkan di dada dan punggung, merekam tindakan pernapasan dan jantung melalui perubahan kapasitansi.
Untuk pengukuran kapasitif aktivitas organ yang lebih tepat, probe logam telah dimasukkan ke dalam organ (terutama jantung) di ujung tabung kateter, kapasitansi diukur antara probe logam dan tubuh subjek.
Dengan frekuensi eksitasi AC yang cukup tinggi dan detektor tegangan yang cukup sensitif, tidak hanya aksi pemompaan tetapi juga suara jantung yang aktif dapat dengan mudah diinterpretasikan.
Seperti transduser induktif, transduser kapasitif juga dapat dibuat menjadi unit mandiri, tidak seperti contoh fisiologis langsung yang dijelaskan di atas.
Beberapa transduser bekerja dengan membuat salah satu pelat kapasitor bergerak, baik sedemikian rupa untuk memvariasikan area tumpang tindih atau jarak antara pelat. Transduser lain bekerja dengan memindahkan bahan dielektrik masuk dan keluar di antara dua pelat tetap:
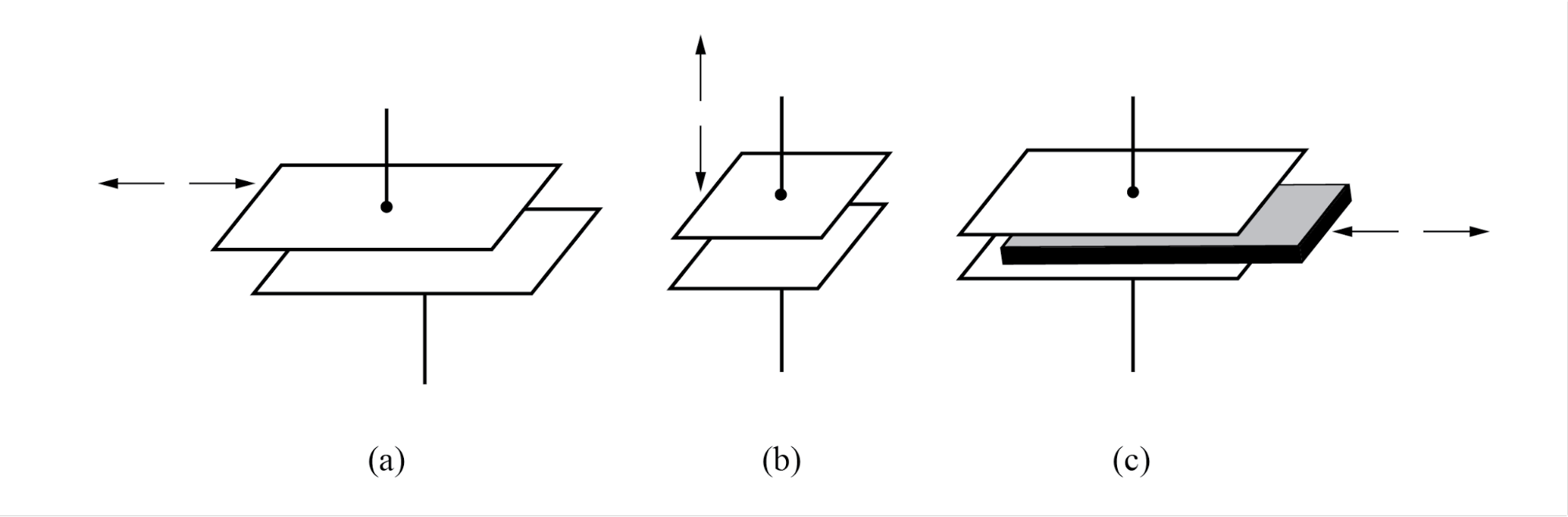
Transduser kapasitif variabel bervariasi; (a) luas tumpang tindih, (b) jarak antar pelat, (c) jumlah dielektrik antar pelat.
Transduser dengan sensitivitas dan kekebalan yang lebih besar terhadap perubahan variabel lain dapat diperoleh melalui desain diferensial, seperti konsep di balik LVDT (Variabel Linier Diferensial Transformator). Berikut adalah beberapa contoh transduser kapasitif diferensial:
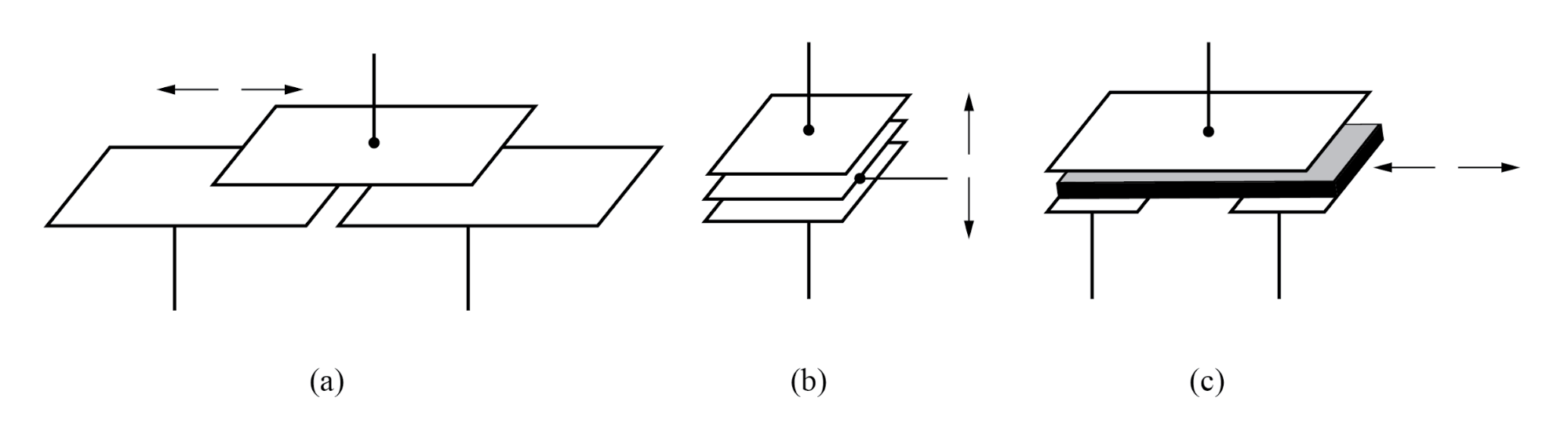
Transduser kapasitif diferensial memvariasikan rasio kapasitansi dengan mengubah:(a) area tumpang tindih, (b) jarak antar pelat, (c) dielektrik antar pelat.
Seperti yang Anda lihat, semua perangkat diferensial yang ditunjukkan pada ilustrasi di atas memiliki tiga sambungan kabel daripada dua:satu kabel untuk masing-masing pelat "ujung" dan satu untuk pelat "umum".
Ketika kapasitansi antara salah satu pelat "ujung" dan pelat "umum" berubah, kapasitansi antara pelat "ujung" lainnya dan pelat "umum" berubah dalam arah yang berlawanan. Jenis transduser ini sangat cocok untuk implementasi di sirkuit jembatan:
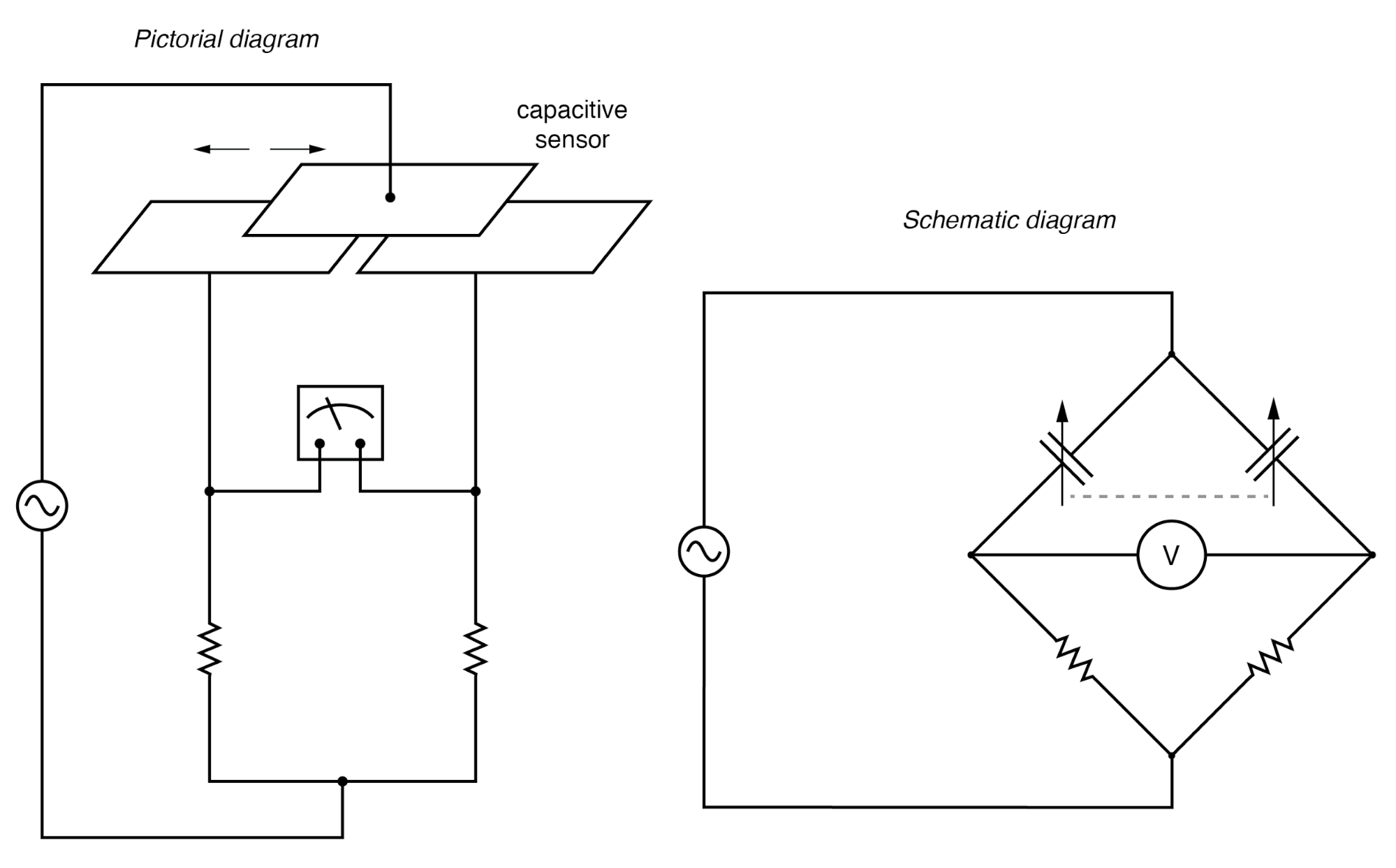
Sirkuit pengukuran jembatan transduser kapasitif diferensial.
Transduser kapasitif memberikan kapasitansi yang relatif kecil untuk sirkuit pengukuran untuk beroperasi, biasanya dalam pico jangkauan farad. Karena itu, frekuensi catu daya tinggi (dalam kisaran megahertz!) biasanya diperlukan untuk mengurangi reaktansi kapasitif ini ke tingkat yang wajar.
Mengingat kapasitansi kecil yang disediakan oleh transduser kapasitif tipikal, kapasitansi nyasar berpotensi menjadi sumber utama kesalahan pengukuran. Pelindung konduktor yang baik penting untuk sirkuit transduser kapasitif yang andal dan akurat!
Sirkuit jembatan bukan satu-satunya cara untuk secara efektif menafsirkan output kapasitansi diferensial dari transduser semacam itu, tetapi ini adalah salah satu yang paling sederhana untuk diterapkan dan dipahami. Seperti pada LVDT, keluaran tegangan jembatan sebanding dengan perpindahan aksi transduser dari posisi tengahnya, dan arah offset akan ditunjukkan oleh pergeseran fasa.
Jenis rangkaian jembatan ini memiliki fungsi yang mirip dengan jenis yang digunakan dengan pengukur regangan:tidak dimaksudkan untuk berada dalam kondisi "seimbang" sepanjang waktu, melainkan tingkat ketidakseimbangan mewakili besarnya kuantitas yang diukur.
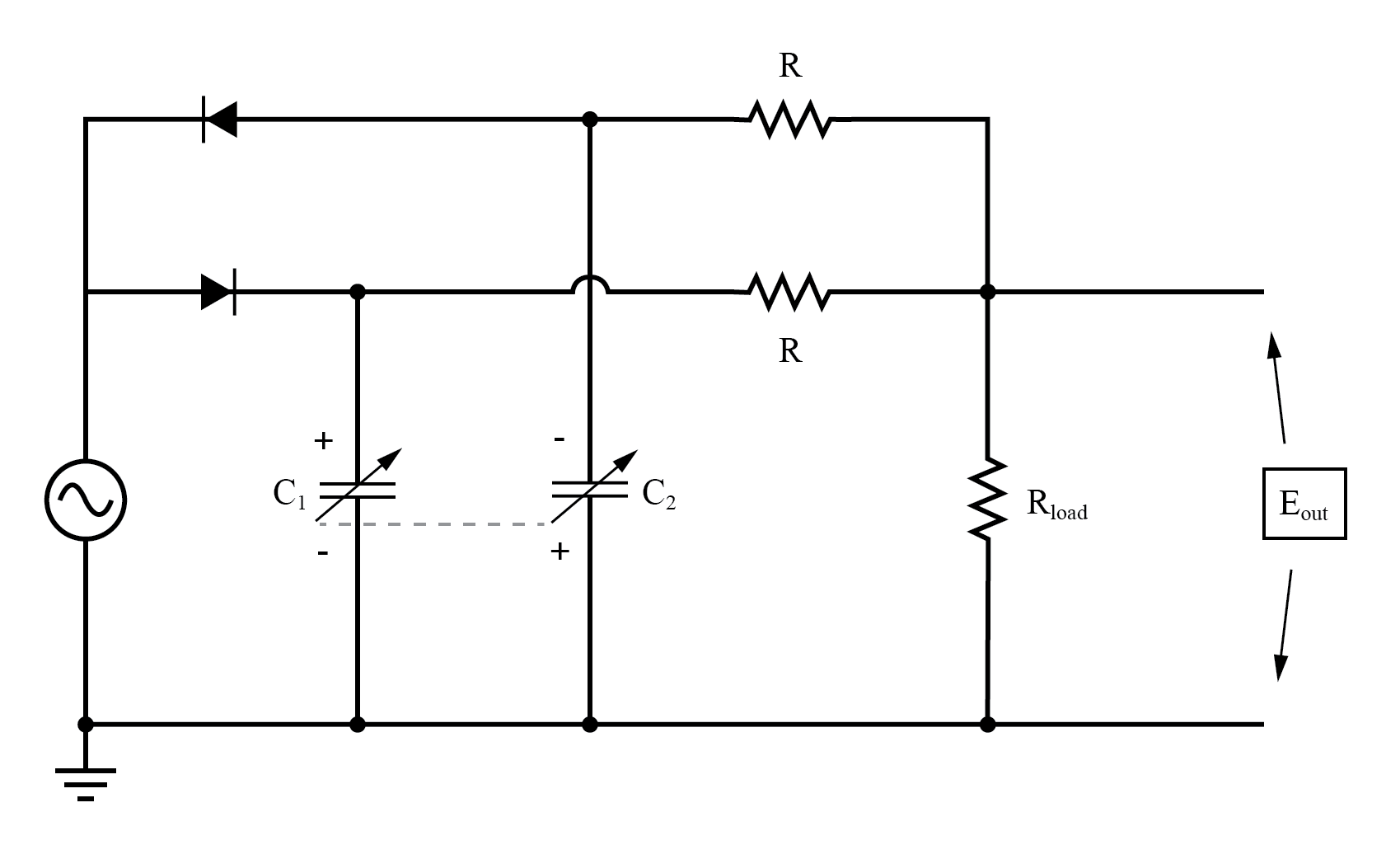
Sebuah alternatif yang menarik untuk rangkaian jembatan untuk menafsirkan kapasitansi diferensial adalah twin-T . Ini membutuhkan penggunaan dioda, “katup satu arah” untuk arus listrik yang disebutkan sebelumnya dalam bab ini:
Sirkuit pengukuran “Twin-T” transduser kapasitif diferensial.
Sirkuit ini mungkin lebih baik dipahami jika digambar ulang agar lebih menyerupai konfigurasi jembatan:
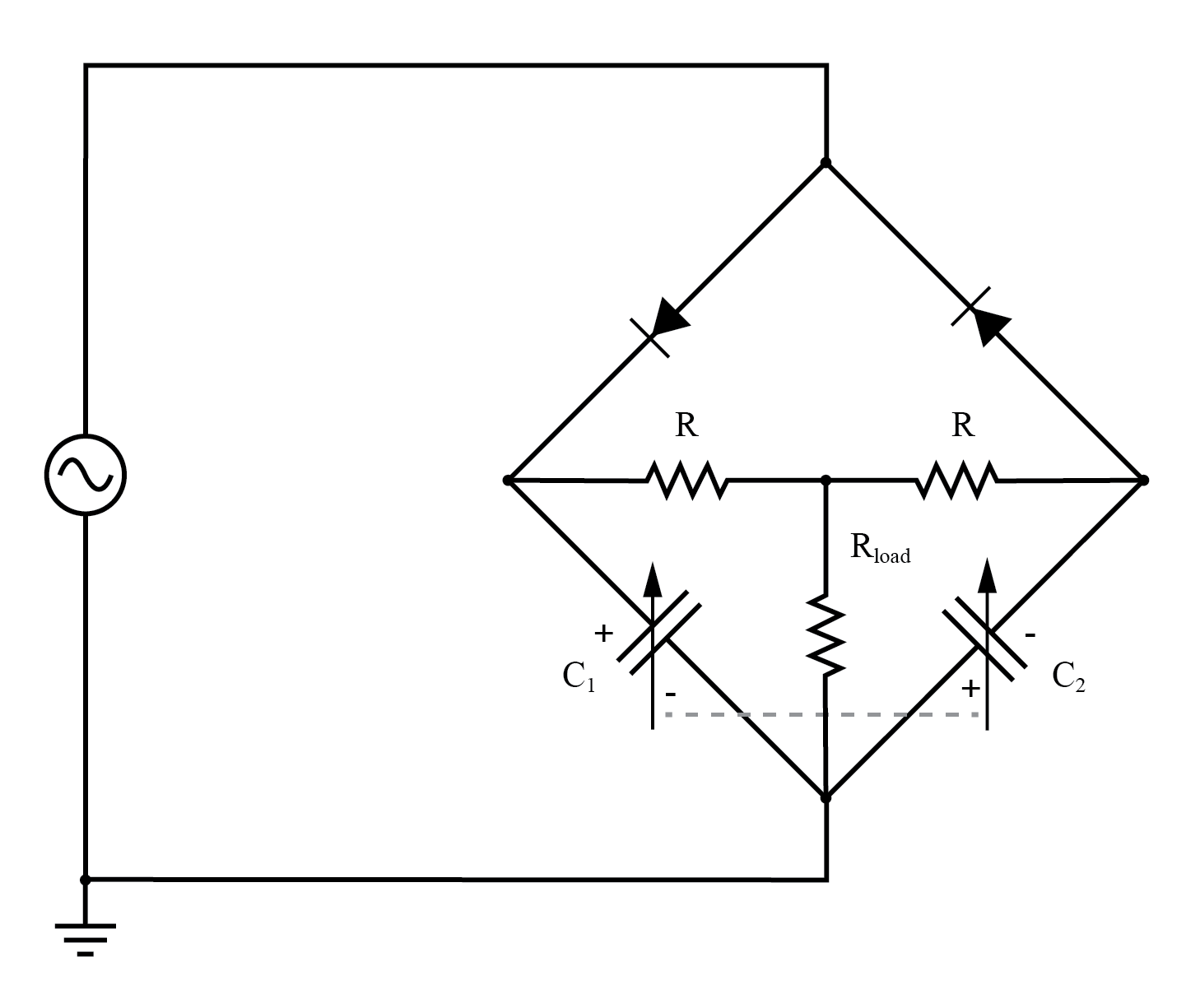
Sirkuit pengukuran “Twin-T” transduser kapasitor diferensial digambar ulang sebagai jembatan. Output melintasi Rbeban .
Kapasitor C1 diisi oleh sumber tegangan AC selama setiap setengah siklus positif (positif yang diukur dengan mengacu pada titik ground), sedangkan C2 dibebankan selama setiap setengah siklus negatif.
Sementara satu kapasitor sedang diisi, kapasitor lainnya melepaskan (pada tingkat yang lebih lambat daripada yang diisi) melalui jaringan tiga resistor. Akibatnya, C1 mempertahankan tegangan DC positif terhadap ground, dan C2 tegangan DC negatif terhadap ground.
Jika transduser kapasitif dipindahkan dari posisi pusat, satu kapasitor akan meningkatkan kapasitansi sementara yang lain akan berkurang. Ini memiliki sedikit pengaruh pada muatan tegangan puncak dari setiap kapasitor, karena ada hambatan yang dapat diabaikan dalam jalur arus pengisian dari sumber ke kapasitor, menghasilkan konstanta waktu yang sangat singkat (τ).
Namun, ketika tiba saatnya untuk melepaskan muatan melalui resistor, kapasitor dengan nilai kapasitansi yang lebih besar akan menahan muatannya lebih lama, menghasilkan tegangan DC rata-rata yang lebih besar dari waktu ke waktu daripada kapasitor dengan nilai yang lebih rendah.
Resistor beban (Rbeban ), yang terhubung di satu ujung ke titik antara dua resistor bernilai sama (R) dan di ujung lainnya ke ground, tidak akan menjatuhkan tegangan DC jika muatan tegangan DC kedua kapasitor sama besarnya.
Sebaliknya, jika satu kapasitor mempertahankan muatan tegangan DC yang lebih besar daripada yang lain karena perbedaan kapasitansi, resistor beban akan menjatuhkan tegangan sebanding dengan perbedaan antara tegangan ini.
Dengan demikian, kapasitansi diferensial diterjemahkan ke dalam tegangan DC melintasi resistor beban.
Di seberang resistor beban, ada tegangan AC dan DC, dengan hanya tegangan DC yang signifikan terhadap perbedaan kapasitansi. Jika diinginkan, filter low-pass dapat ditambahkan ke output dari rangkaian ini untuk memblokir AC, hanya menyisakan sinyal DC untuk ditafsirkan oleh sirkuit pengukuran:
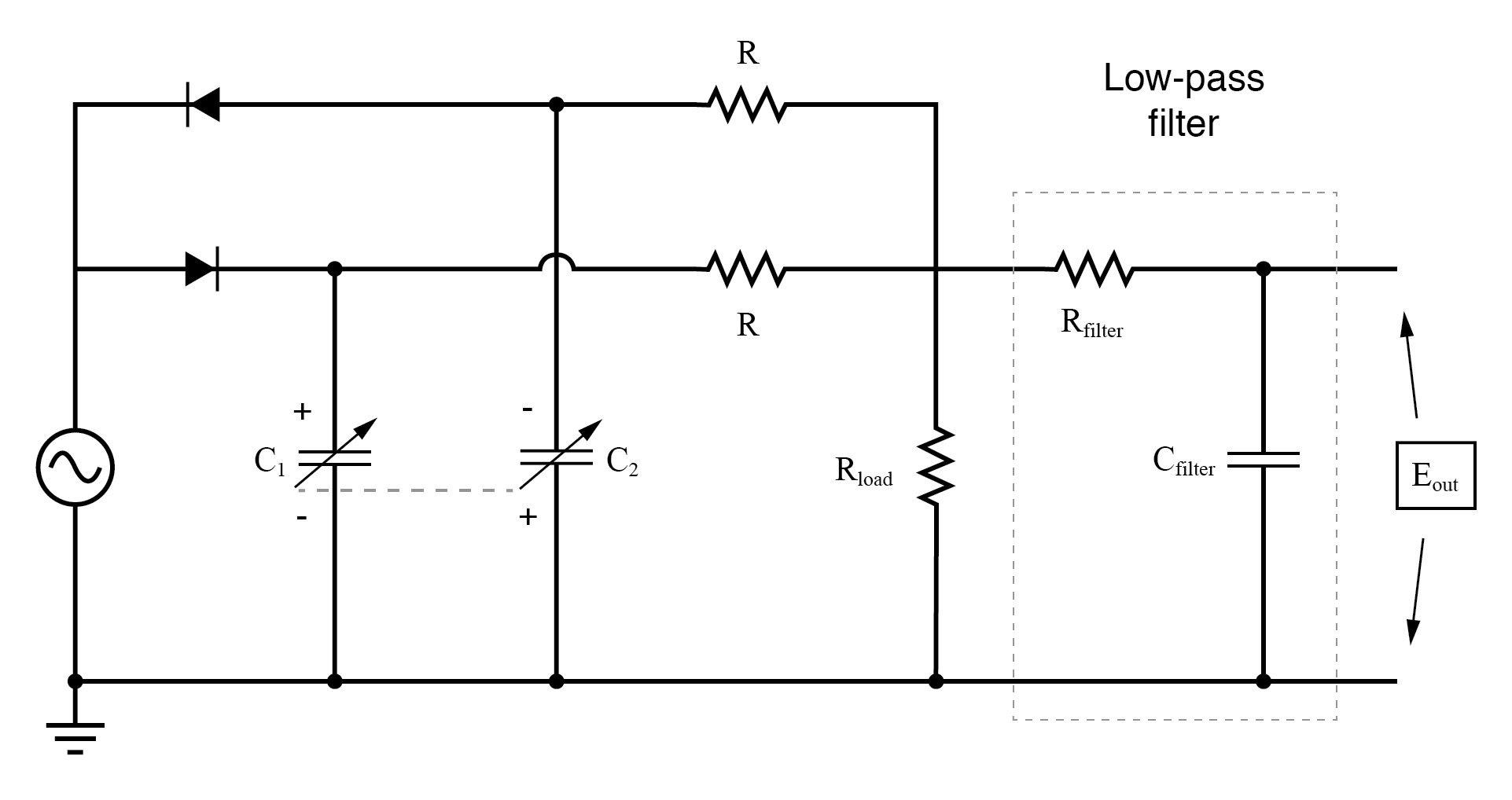
Penambahan filter low-pass ke “twin-T” mengalirkan DC murni ke indikator pengukuran.
Sebagai sirkuit pengukuran untuk sensor kapasitif diferensial, konfigurasi twin-T memiliki banyak keunggulan dibandingkan konfigurasi jembatan standar.
Pertama dan terpenting, perpindahan transduser ditunjukkan oleh tegangan DC sederhana, bukan tegangan AC yang besarnya dan fase harus ditafsirkan untuk mengetahui kapasitansi mana yang lebih besar.
Selanjutnya, dengan nilai komponen dan output catu daya yang tepat, sinyal output DC ini mungkin cukup kuat untuk secara langsung menggerakkan gerakan meteran elektromekanis, sehingga menghilangkan kebutuhan akan rangkaian amplifier.
Keuntungan penting lainnya adalah bahwa semua elemen rangkaian penting memiliki satu terminal yang terhubung langsung ke ground:sumber, resistor beban, dan kedua kapasitor semuanya direferensikan ke ground.
Ini membantu meminimalkan efek buruk dari kapasitansi nyasar yang biasanya mengganggu sirkuit pengukuran jembatan, juga menghilangkan kebutuhan akan tindakan kompensasi seperti bumi Wagner.
Sirkuit ini juga mudah untuk menentukan bagian-bagiannya. Biasanya, rangkaian pengukuran yang menggabungkan dioda komplementer memerlukan pemilihan dioda yang "cocok" untuk akurasi yang baik. Tidak demikian dengan sirkuit ini!
Selama tegangan catu daya secara signifikan lebih besar daripada deviasi penurunan tegangan antara kedua dioda, efek ketidakcocokan minimal dan hanya berkontribusi kecil terhadap kesalahan pengukuran.
Selanjutnya, variasi frekuensi suplai memiliki dampak yang relatif rendah pada penguatan (berapa banyak tegangan output yang dikembangkan untuk jumlah perpindahan transduser tertentu), dan tegangan suplai gelombang persegi bekerja serta gelombang sinus, dengan asumsi siklus kerja 50% (sama dengan setengah siklus positif dan negatif), tentu saja.
Teknologi Industri
Ketika alternator menghasilkan tegangan AC, tegangan mengubah polaritas dari waktu ke waktu, tetapi melakukannya dengan cara yang sangat khusus. Ketika digambarkan dari waktu ke waktu, gelombang yang dilacak oleh tegangan polaritas bolak-balik ini dari alternator mengambil bentuk yang berbeda, yang
Bilangan kompleks berguna untuk analisis rangkaian AC karena menyediakan metode yang mudah digunakan untuk menunjukkan pergeseran fasa secara simbolis antara besaran AC seperti tegangan dan arus. Namun, bagi kebanyakan orang, kesetaraan antara vektor abstrak dan besaran rangkaian nyata bukanlah hal
Prinsip non-sinusoidal, bentuk gelombang berulang yang setara dengan serangkaian gelombang sinus pada frekuensi yang berbeda adalah sifat dasar gelombang pada umumnya dan memiliki nilai praktis yang besar dalam studi rangkaian AC. Artinya, setiap kali kita memiliki bentuk gelombang yang tidak berbe
Analisis SPICE Isolasi Listrik Selain kemampuan untuk dengan mudah mengubah antara tingkat tegangan dan arus yang berbeda dalam rangkaian AC dan DC, transformator juga menyediakan fitur yang sangat berguna yang disebut isolasi , yang merupakan kemampuan untuk menyambungkan satu sirkuit ke sirkuit l