

Teknologi Industri

Manufaktur industri
Setelah pengenalan sistem distribusi listrik DC oleh Edison di Amerika Serikat, transisi bertahap ke sistem AC yang lebih ekonomis dimulai. Pencahayaan bekerja dengan baik di AC seperti di DC.
Transmisi energi listrik menempuh jarak yang lebih jauh dengan kerugian yang lebih rendah dengan arus bolak-balik. Namun, motor bermasalah dengan arus bolak-balik. Awalnya, motor AC dibuat seperti motor DC, tetapi banyak masalah muncul karena perubahan medan magnet.
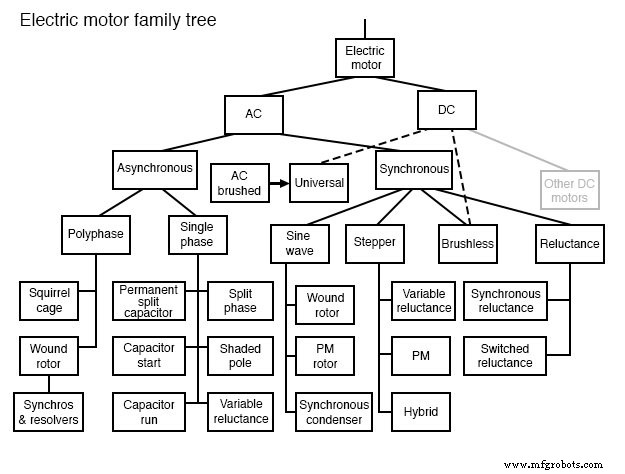
Diagram keluarga motor listrik AC
Charles P. Steinmetz berkontribusi untuk memecahkan masalah ini dengan penyelidikannya tentang rugi-rugi histeresis pada armatur besi. Nikola Tesla membayangkan jenis motor yang sama sekali baru ketika dia memvisualisasikan turbin yang berputar, tidak berputar oleh air atau uap, tetapi oleh medan magnet yang berputar.
Jenis motor barunya, motor induksi AC, adalah pekerja keras industri hingga hari ini. Kekasaran dan kesederhanaannya membuat umur panjang, keandalan tinggi, dan perawatan rendah.
Namun motor AC kecil yang disikat, mirip dengan variasi DC, bertahan dalam peralatan kecil bersama dengan motor induksi Tesla kecil. Di atas satu tenaga kuda (750 W), motor Tesla berkuasa.
Sirkuit elektronik solid-state modern menggerakkan motor DC brushless dengan bentuk gelombang AC yang dihasilkan dari sumber DC. Motor DC brushless, sebenarnya motor AC, menggantikan motor DC brushed konvensional dalam banyak aplikasi. Dan, motor stepper , versi digital dari motor, digerakkan oleh gelombang persegi arus bolak-balik, sekali lagi, yang dihasilkan oleh sirkuit solid-state.
Gambar di atas menunjukkan silsilah keluarga motor AC yang dijelaskan dalam bab ini.
Kapal pesiar dan kapal besar lainnya menggantikan poros penggerak roda gigi reduksi dengan generator dan motor multi-megawatt besar. Seperti yang terjadi pada lokomotif diesel-listrik dalam skala yang lebih kecil selama bertahun-tahun.
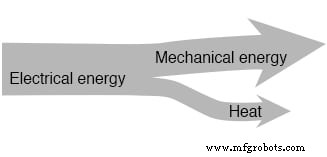
Diagram tingkat sistem motor
Pada tingkat sistem, (Gambar di atas) motor mengambil energi listrik dalam bentuk beda potensial dan aliran arus, mengubahnya menjadi kerja mekanis. Sayangnya, motor listrik tidak 100% efisien. Sebagian energi listrik hilang menjadi panas, bentuk energi lain, karena rugi-rugi I2R (juga disebut rugi-rugi tembaga) pada belitan motor.
Panas adalah produk sampingan yang tidak diinginkan dari konversi ini. Itu harus dikeluarkan dari motor dan dapat mempengaruhi umur panjang. Jadi, salah satu tujuannya adalah untuk memaksimalkan efisiensi motor, mengurangi kehilangan panas. Motor AC juga memiliki beberapa kerugian yang tidak dialami oleh motor DC:histeresis dan arus eddy.
Perancang awal motor AC mengalami masalah yang ditelusuri ke kerugian yang unik untuk magnet arus bolak-balik. Masalah-masalah ini ditemui ketika mengadaptasi motor DC ke operasi AC. Meskipun beberapa motor AC saat ini memiliki kemiripan dengan motor DC, masalah ini harus diselesaikan sebelum motor AC jenis apa pun dapat dirancang dengan benar.
Baik inti rotor dan stator motor AC terdiri dari tumpukan laminasi berinsulasi. Laminasi dilapisi dengan pernis isolasi sebelum ditumpuk dan dibaut ke dalam bentuk akhir. Arus pusaran diminimalkan dengan memecah loop konduktif potensial menjadi segmen yang lebih kecil dengan kerugian yang lebih kecil. (Gambar di bawah)
Loop arus terlihat seperti lilitan sekunder trafo korsleting. Laminasi terisolasi tipis mematahkan loop ini. Juga, silikon (semikonduktor) yang ditambahkan ke paduan yang digunakan dalam laminasi meningkatkan hambatan listrik yang menurunkan besarnya arus eddy.
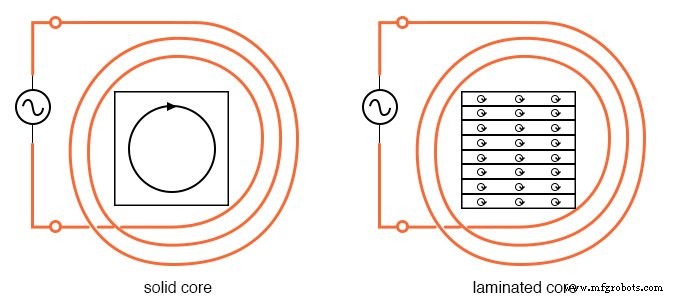
Arus pusaran dalam inti besi
Jika laminasi terbuat dari baja berorientasi butir paduan silikon, histeresis kerugian diminimalkan. Histeresis magnetik adalah ketertinggalan kekuatan medan magnet dibandingkan dengan gaya magnetisasi. Jika paku besi lunak dimagnetisasi sementara oleh solenoida, orang akan mengharapkan paku kehilangan medan magnet setelah solenoida dihilangkan energinya. Namun, sejumlah kecil magnetisasi sisa , BR , karena histeresis tetap (Gambar di bawah).
Arus bolak-balik harus mengeluarkan energi, -HC , kekuatan paksa , dalam mengatasi sisa magnetisasi ini sebelum dapat memagnetisasi inti kembali ke nol, apalagi berlawanan arah.
Kehilangan histeresis ditemui setiap kali polaritas AC berbalik. Rugi sebanding dengan area yang dilingkupi oleh loop histeresis pada kurva B-H. Paduan besi "lunak" memiliki kerugian lebih rendah daripada paduan baja karbon tinggi "keras". Baja berorientasi butiran silikon, silikon 4%, digulung untuk mengorientasikan butiran atau struktur kristal, memiliki kehilangan yang lebih rendah.
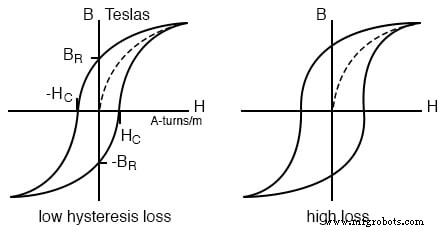
Kurva histeresis untuk paduan kehilangan rendah dan tinggi
Setelah hukum histeresis Steinmetz dapat memprediksi rugi-rugi inti besi, maka dimungkinkan untuk merancang motor AC yang bekerja sesuai rancangan. Ini mirip dengan kemampuan merancang jembatan sebelumnya yang tidak akan runtuh setelah benar-benar dibangun.
Pengetahuan tentang arus eddy dan histeresis ini pertama kali diterapkan untuk membangun motor komutator AC yang serupa dengan rekan DC mereka. Hari ini ini hanyalah kategori kecil dari motor AC. Yang lain menemukan jenis baru motor AC yang memiliki sedikit kemiripan dengan kerabat DC mereka.
Teknologi Industri
Pencetakan 3D atau CNC? Temukan teknologi terbaik untuk memproduksi bagian logam Anda Unduh panduan kami tentang memproduksi bagian logam SLM &DMLS:apa bedanya? Selective Laser Melting (SLM) dan Direct Metal Laser Sintering (DMLS) adalah dua proses manufaktur aditif logam yang termasuk dalam kelu
Sejarah, produksi, dan penggunaan pipa baja Pipa baja adalah tabung silinder yang terbuat dari baja yang digunakan dalam banyak cara di bidang manufaktur dan infrastruktur. Mereka adalah produk yang paling banyak digunakan yang dibuat oleh industri baja. Penggunaan utama pipa adalah dalam pengangk
Menurut standar GD&T ASME Y14.5 2009, 14 toleransi geometris dibagi menjadi 5 kelompok. Runout melingkar termasuk dalam kategori Runout, yang digunakan untuk mengontrol bentuk elemen melingkar dari permukaan dan hubungannya dengan sumbu referensi. Dalam artikel ini, kami akan memperkenalkan definis
Motor AC dan pembuat enkode adalah dua bagian penting dari robot. Mereka memberikan tujuan robot. Tanpa mereka, tidak akan ada gerakan, dan tanpa gerakan, robot tidak memiliki tujuan – kecuali, tentu saja, seseorang menginginkan patung robot industri besar untuk ruang tamu atau tempat kerja mereka.