Motor Induksi Tesla Polyphase
Kebanyakan motor AC adalah motor induksi. Motor induksi disukai karena kekasaran dan kesederhanaannya. Faktanya, 90% motor industri adalah motor induksi.
Nikola Tesla menyusun prinsip-prinsip dasar motor induksi polifase pada tahun 1883 dan memiliki model setengah tenaga kuda (400 watt) pada tahun 1888. Tesla menjual hak produksi kepada George Westinghouse seharga $65.000.
Kebanyakan motor industri besar (> 1 hp atau 1 kW) adalah motor induksi polifase . Dengan polifase, yang kami maksud adalah stator berisi beberapa belitan berbeda per kutub motor, yang digerakkan oleh gelombang sinus pergeseran waktu yang sesuai.
Dalam praktiknya, ini adalah dua atau tiga fase. Motor industri besar adalah 3 fase. Meskipun kami menyertakan banyak ilustrasi motor dua fase untuk kesederhanaan, kami harus menekankan bahwa hampir semua motor polifase adalah tiga fase.
Oleh motor induksi , yang kami maksud adalah bahwa belitan stator menginduksi aliran arus di konduktor rotor, seperti transformator, tidak seperti motor komutator DC yang disikat.
Konstruksi Motor Induksi AC
Motor induksi terdiri dari rotor, yang dikenal sebagai angker, dan stator yang berisi belitan yang terhubung ke sumber energi polifase seperti yang ditunjukkan pada gambar di bawah. Motor induksi 2 fase sederhana di bawah ini mirip dengan motor 1/2 tenaga kuda yang diperkenalkan Nikola Tesla pada tahun 1888.
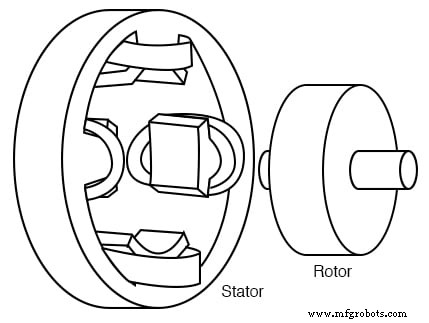
Motor induksi polifase Tesla
Stator pada gambar di atas dililit dengan pasangan kumparan yang sesuai dengan fase energi listrik yang tersedia. Stator motor induksi 2 fasa di atas memiliki 2 pasang kumparan, satu pasang untuk masing-masing dua fasa AC.
Kumparan individu dari pasangan dihubungkan secara seri dan sesuai dengan kutub yang berlawanan dari elektromagnet. Artinya, satu kumparan sesuai dengan kutub-N, yang lain dengan kutub-S sampai fase AC mengubah polaritas. Pasangan kumparan lainnya berorientasi 90° dalam ruang ke pasangan pertama.
Sepasang kumparan ini terhubung ke AC yang digeser dalam waktu 90° dalam kasus motor 2 fase. Pada masa Tesla, sumber dari dua fase AC adalah alternator 2 fase.
Stator pada gambar di atas memiliki menonjol , kutub yang menonjol, seperti yang digunakan pada motor induksi awal Tesla. Desain ini digunakan sampai hari ini untuk motor tenaga kuda sub-fraksional (<50 watt). Namun, untuk motor yang lebih besar, pulsasi torsi yang lebih sedikit dan hasil efisiensi yang lebih tinggi jika kumparan dimasukkan ke dalam slot yang dipotong ke dalam laminasi stator (gambar di bawah).
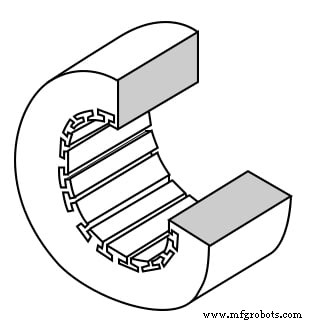
Bingkai stator menunjukkan slot untuk belitan
Laminasi stator adalah cincin berinsulasi tipis dengan slot yang dilubangi dari lembaran baja kelas listrik. Tumpukan ini diamankan dengan sekrup ujung, yang juga dapat menahan rumah ujung.
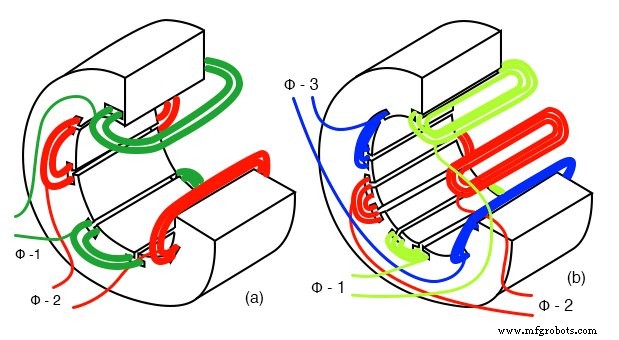
Stator dengan belitan (a) 2-φ dan (b) 3-
Pada gambar di atas, belitan untuk motor dua fase dan motor tiga fase telah dipasang di slot stator. Gulungan dililitkan pada perlengkapan eksternal, kemudian dimasukkan ke dalam slot. Isolasi yang terjepit di antara pinggiran kumparan dan slot melindungi dari abrasi.
Gulungan stator sebenarnya lebih kompleks daripada belitan tunggal per kutub pada gambar di atas. Membandingkan motor 2- dengan motor 2-φ Tesla dengan kutub yang menonjol, jumlah kumparannya sama. Pada motor besar yang sebenarnya, belitan kutub dibagi menjadi kumparan identik yang dimasukkan ke banyak slot yang lebih kecil daripada di atas.
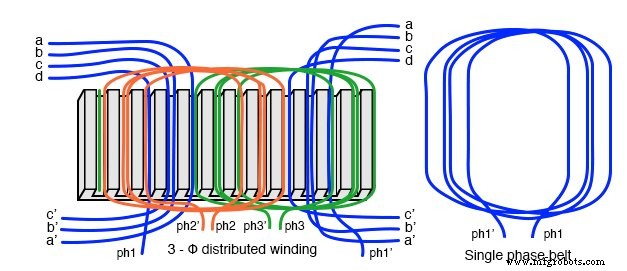
Kelompok ini disebut sabuk fase (lihat gambar di bawah). Kumparan terdistribusi dari sabuk fase membatalkan beberapa harmonik aneh, menghasilkan distribusi medan magnet yang lebih sinusoidal melintasi kutub. Ini ditunjukkan di bagian motor sinkron.
Slot di tepi tiang mungkin memiliki belokan lebih sedikit daripada slot lainnya. Slot tepi dapat berisi belitan dari dua fase. Artinya, sabuk fase tumpang tindih.
Kunci popularitas motor induksi AC adalah kesederhanaannya sebagaimana dibuktikan oleh rotor sederhana (gambar di bawah). Rotor terdiri dari poros, rotor berlapis baja, dan kandang tupai tembaga atau aluminium tertanam , ditunjukkan pada (b) dilepas dari rotor.
Dibandingkan dengan armature motor DC, tidak ada komutator. Ini menghilangkan sikat, lengkungan, percikan, debu grafit, penyesuaian dan penggantian sikat, dan pemesinan ulang komutator.
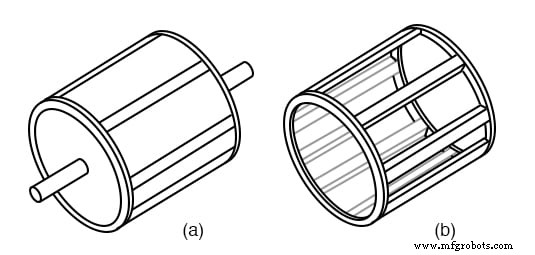
Rotor berlaminasi dengan (a) sangkar tupai tertanam, (b) sangkar konduktif dilepas dari rotor
Konduktor sangkar tupai dapat dimiringkan, dipelintir, sehubungan dengan porosnya. Ketidaksejajaran dengan slot stator mengurangi denyut torsi.
Inti rotor dan inti stator terdiri dari tumpukan laminasi berinsulasi. Laminasi dilapisi dengan oksida isolasi atau pernis untuk meminimalkan kerugian arus eddy. Paduan yang digunakan dalam laminasi dipilih untuk kehilangan histeresis yang rendah.
Teori Pengoperasian Motor Induksi
Penjelasan singkat tentang operasi adalah bahwa stator menciptakan medan magnet berputar yang menyeret rotor ke sekelilingnya.
Teori operasi motor induksi didasarkan pada medan magnet yang berputar. Salah satu cara untuk menciptakan medan magnet yang berputar adalah dengan memutar magnet permanen. Jika garis fluks magnet yang bergerak memotong piringan konduktif, ia akan mengikuti gerakan magnet.
Garis-garis fluks yang memotong konduktor akan menginduksi tegangan, dan aliran arus konsekuen, dalam piringan konduktif. Aliran arus ini menciptakan elektromagnet yang polaritasnya menentang gerakan magnet permanen– Hukum Lenz .
Polaritas elektromagnet sedemikian rupa sehingga menarik magnet permanen. Disk mengikuti dengan kecepatan yang sedikit lebih rendah daripada magnet permanen.
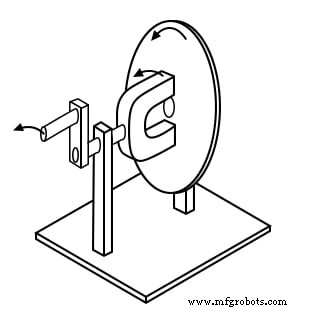
Medan magnet yang berputar menghasilkan torsi dalam piringan konduktif
Torsi yang dikembangkan oleh disk sebanding dengan jumlah garis fluks yang memotong disk dan laju pemotongan disk. Jika piringan berputar dengan kecepatan yang sama dengan magnet permanen, tidak akan ada fluks yang memotong piringan, tidak ada aliran arus induksi, tidak ada medan elektromagnet, tidak ada torsi.
Dengan demikian, kecepatan piringan akan selalu berada di belakang magnet permanen yang berputar, sehingga garis fluks yang memotong piringan menginduksi arus, menciptakan medan elektromagnetik di piringan, yang mengikuti magnet permanen.
Jika beban diterapkan ke disk, memperlambatnya, lebih banyak torsi akan dikembangkan karena lebih banyak garis fluks memotong disk. Torsi sebanding dengan selip , sejauh mana piringan berada di belakang magnet yang berputar. Lebih banyak slip sesuai dengan lebih banyak fluks yang memotong disk konduktif, mengembangkan lebih banyak torsi.
Sebuah speedometer eddy-current otomotif analog didasarkan pada prinsip yang diilustrasikan di atas. Dengan disk yang ditahan oleh pegas, defleksi disk dan jarum sebanding dengan laju rotasi magnet.
Medan magnet yang berputar dibuat oleh dua kumparan yang ditempatkan pada sudut kanan satu sama lain, didorong oleh arus yang berbeda fase 90°. Ini seharusnya tidak mengejutkan jika Anda terbiasa dengan pola Lissajous osiloskop.
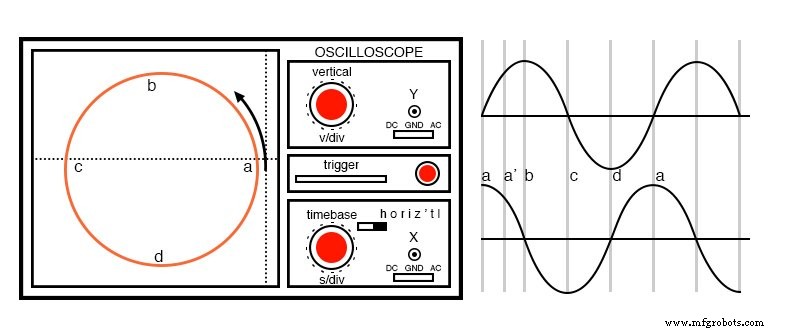
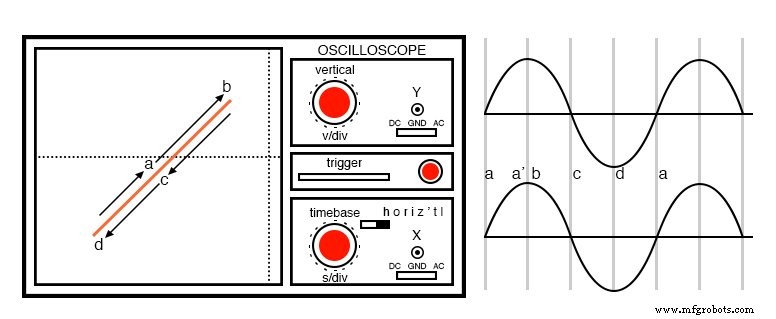
Di luar fase (90°), gelombang sinus menghasilkan pola Lissajous melingkar
Pada gambar di atas, Lissajous melingkar dihasilkan dengan menggerakkan input osiloskop horizontal dan vertikal dengan gelombang sinus fase 90°. Mulai dari (a) dengan defleksi maksimum “X” dan minimum “Y”, jejak bergerak ke atas dan ke kiri menuju (b).
Antara (a) dan (b) kedua bentuk gelombang sama dengan 0,707 Vpk pada 45°. Titik ini (0,707, 0,707) jatuh pada jari-jari lingkaran antara (a) dan (b) Jejak bergerak ke (b) dengan defleksi “X” minimum dan maksimum “Y”. Dengan defleksi “X” negatif maksimum dan defleksi “Y” minimum, jejak bergerak ke (c).
Kemudian dengan minimum “X” dan maksimum negatif “Y”, ia bergerak ke (d), dan kembali ke (a), menyelesaikan satu siklus.
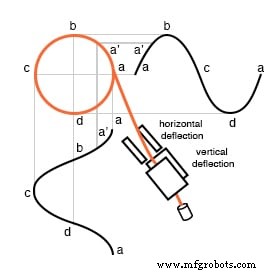
sinus sumbu X dan lingkaran jejak cosinus sumbu Y
Gambar menunjukkan dua gelombang sinus pergeseran fasa 90 ° diterapkan pada pelat defleksi osiloskop yang berada di sudut kanan dalam ruang. Kombinasi gelombang sinus fase 90 ° dan defleksi sudut kanan, menghasilkan pola dua dimensi – lingkaran. Lingkaran ini dilacak oleh berkas elektron yang berputar berlawanan arah jarum jam.
Untuk referensi, gambar di bawah ini menunjukkan mengapa gelombang sinus sefasa tidak akan menghasilkan pola melingkar. Defleksi “X” dan “Y” yang sama memindahkan titik yang diterangi dari titik asal di (a) ke atas ke kanan (1,1) di (b), kembali ke bawah ke kiri ke titik asal di (c), ke kiri bawah ke (-1 .-1) di (d), dan kembali tegak ke titik asal. Garis dihasilkan oleh defleksi yang sama di sepanjang kedua sumbu; y=x adalah garis lurus.
Tidak ada gerakan melingkar dari bentuk gelombang dalam fase
Jika sepasang gelombang sinus 90 ° di luar fase menghasilkan Lissajous melingkar, sepasang arus yang sama harus dapat menghasilkan medan magnet berputar melingkar. Demikian halnya dengan motor 2 fasa. Dengan analogi tiga belitan yang ditempatkan terpisah 120° di ruang angkasa, dan diberi makan dengan arus fase 120° yang sesuai juga akan menghasilkan medan magnet yang berputar.
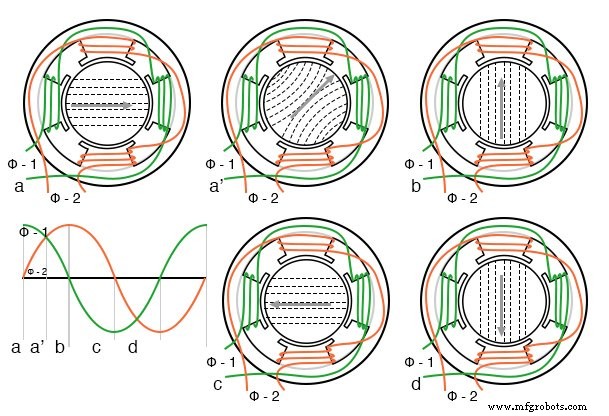
Memutar medan magnet dari gelombang sinus bertahap 90°
Sebagai gelombang sinus 90° bertahap, gambar di atas, kemajuan dari titik (a) melalui (d), medan magnet berputar berlawanan (gambar a-d) sebagai berikut:
- (a) -1 maksimum, -2 nol
- (a’) -1 70%, -2 70%
- (b) -1 nol, -2 maksimum
- (c) -1 negatif maksimum, -2 nol
- (d) -1 nol, -2 negatif maksimum
Kecepatan Motor Penuh dan Kecepatan Motor Sinkron
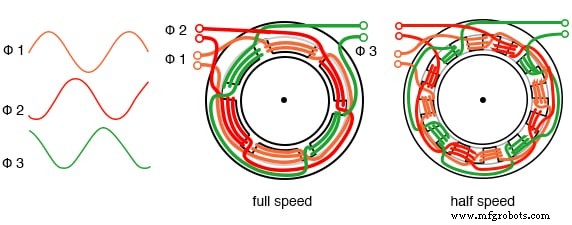
Laju rotasi medan magnet putar stator berhubungan dengan jumlah pasangan kutub per fase stator. Angka "kecepatan penuh" di bawah ini memiliki total enam kutub atau tiga pasang kutub dan tiga fase. Namun, hanya ada satu pasangan kutub per fase.
Medan magnet akan berputar sekali per siklus gelombang sinus. Dalam hal daya 60 Hz, medan berputar pada 60 kali per detik atau 3600 putaran per menit (rpm). Untuk daya 50 Hz, ia berputar pada 50 putaran per detik atau 3000 rpm. 3600 dan 3000 rpm, adalah kecepatan sinkron dari motor.
Meskipun rotor motor induksi tidak pernah mencapai kecepatan ini, tentu saja ini adalah batas atas. Jika kita menggandakan jumlah kutub motor, kecepatan sinkron terpotong menjadi dua karena medan magnet berputar 180° di ruang angkasa selama 360° gelombang sinus listrik.
Menggandakan kutub stator mengurangi separuh kecepatan sinkron
Kecepatan sinkron diberikan oleh:
Ns =120·f/P Ns =kecepatan sinkron dalam rpm f =frekuensi daya yang diterapkan, Hz P =jumlah total kutub per fasa, kelipatan 2
Contoh: Angka "setengah kecepatan" di atas memiliki empat kutub per fase (3 fase). Kecepatan sinkron untuk daya 50 Hz adalah:S =120·50/4 =1500 rpm
Penjelasan singkat dari motor induksi adalah bahwa medan magnet berputar yang dihasilkan oleh stator menyeret rotor ke sekelilingnya.
Penjelasan yang lebih tepat lagi adalah bahwa medan magnet stator menginduksi arus bolak-balik ke dalam konduktor sangkar tupai rotor yang merupakan sekunder transformator. Arus rotor yang diinduksi ini, pada gilirannya, menciptakan medan magnet.
Medan magnet stator yang berputar berinteraksi dengan medan rotor ini. Medan rotor mencoba untuk menyelaraskan dengan medan stator yang berputar. Hasilnya adalah putaran rotor sangkar tupai. Jika tidak ada beban torsi motor mekanis, tidak ada bantalan, lilitan, atau kerugian lainnya, rotor akan berputar pada kecepatan sinkron.
Namun, slip antara rotor dan medan stator kecepatan sinkron mengembangkan torsi. Ini adalah fluks magnet yang memotong konduktor rotor saat tergelincir yang mengembangkan torsi. Dengan demikian, motor yang dibebani akan tergelincir sebanding dengan beban mekanis.
Jika rotor dijalankan pada kecepatan sinkron, tidak akan ada fluks stator yang memotong rotor, tidak ada arus yang diinduksi pada rotor, tidak ada torsi.
Torsi pada Motor Induksi
Ketika daya pertama kali diberikan ke motor, rotor dalam keadaan diam, sedangkan medan magnet stator berputar pada kecepatan sinkron Ns . Medan stator memotong rotor pada kecepatan sinkron Ns . Arus induksi pada belitan pendek rotor adalah maksimum, seperti frekuensi arus, frekuensi saluran.
Saat kecepatan rotor bertambah, laju di mana fluks stator memotong rotor adalah perbedaan antara kecepatan sinkron Ns dan kecepatan rotor aktual N, atau (Ns - N). Rasio fluks aktual yang memotong rotor dengan kecepatan sinkron didefinisikan sebagai slip :
s =(Ns - N)/Ns di mana:Ns =kecepatan sinkron, N =kecepatan rotor
Frekuensi arus yang diinduksi ke dalam konduktor rotor hanya setinggi frekuensi saluran pada saat motor start, menurun saat rotor mendekati kecepatan sinkron. Frekuensi rotor diberikan oleh:
fr =s·f dimana:s =slip, f =frekuensi saluran listrik stator
Slip pada torsi 100% biasanya 5% atau kurang pada motor induksi. Jadi untuk frekuensi saluran f =50 Hz, frekuensi arus induksi pada rotor fr=0,05·50 =2,5 Hz. Mengapa sangat rendah? Medan magnet stator berputar pada 50 Hz. Kecepatan rotor berkurang 5%.
Medan magnet yang berputar hanya memotong rotor pada 2,5 Hz. 2.5 Hz adalah perbedaan antara kecepatan sinkron dan kecepatan rotor yang sebenarnya. Jika rotor berputar sedikit lebih cepat, pada kecepatan sinkron, tidak ada fluks yang akan memotong rotor sama sekali, fr =0.
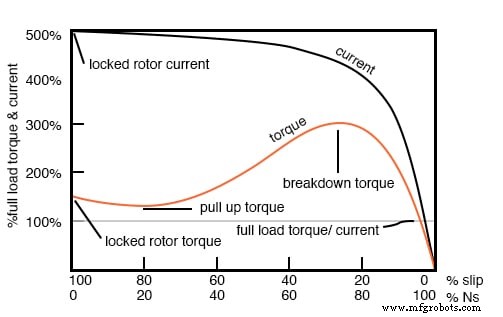
Torsi dan kecepatan vs %Slip. %Ns =%Kecepatan Sinkron
Grafik di atas menunjukkan bahwa torsi awal yang dikenal sebagai torsi rotor terkunci (LRT) lebih tinggi dari 100% torsi beban penuh (FLT), peringkat torsi kontinu yang aman. Torsi rotor yang terkunci adalah sekitar 175% dari FLT untuk contoh motor yang digambarkan di atas.
Arus awal dikenal sebagai arus rotor terkunci (LRC) adalah 500% dari arus beban penuh (FLC), arus berjalan aman. Arusnya tinggi karena ini analog dengan arus korsleting sekunder pada transformator. Saat rotor mulai berputar, torsi dapat berkurang sedikit untuk kelas motor tertentu ke nilai yang dikenal sebagai torsi pull-up .
Ini adalah nilai torsi terendah yang pernah ditemui oleh motor starter. Saat rotor memperoleh 80% dari kecepatan sinkron, torsi meningkat dari 175% hingga 300% dari torsi beban penuh. Torsi mogok . ini disebabkan oleh slip 20% yang lebih besar dari biasanya.
Arus hanya berkurang sedikit pada titik ini tetapi akan berkurang dengan cepat setelah titik ini. Saat rotor berakselerasi hingga beberapa persen dari kecepatan sinkron, torsi dan arus akan berkurang secara substansial. Slip akan menjadi hanya beberapa persen selama operasi normal.
Untuk motor yang sedang berjalan, setiap bagian dari kurva torsi di bawah nilai torsi 100% adalah normal. Beban motor menentukan titik operasi pada kurva torsi. Meskipun torsi dan arus motor dapat melebihi 100% selama beberapa detik selama start, pengoperasian terus-menerus di atas 100% dapat merusak motor.
Setiap beban torsi motor di atas torsi breakdown akan menghentikan motor. Torsi, slip, dan arus akan mendekati nol untuk kondisi beban “tanpa torsi mekanis”. Kondisi ini analog dengan trafo sekunder terbuka.
Ada beberapa desain motor induksi dasar yang menunjukkan variasi yang cukup besar dari kurva torsi di atas. Desain yang berbeda dioptimalkan untuk memulai dan menjalankan berbagai jenis beban. Torsi rotor terkunci (LRT) untuk berbagai desain dan ukuran motor berkisar antara 60% hingga 350% dari torsi beban penuh (FLT).
Arus start atau arus rotor terkunci (LRC) dapat berkisar dari 500% hingga 1400% dari arus beban penuh (FLC). Penarikan arus ini dapat menimbulkan masalah awal untuk motor induksi besar.
Kelas Motor NEMA dan IEC
Berbagai kelas standar (atau desain) untuk motor, yang sesuai dengan kurva torsi (gambar di bawah) telah dikembangkan untuk menggerakkan berbagai jenis beban dengan lebih baik. National Electrical Manufacturers Association (NEMA) telah menetapkan kelas motor A, B, C, dan D untuk memenuhi persyaratan berkendara ini.
Kelas Komisi Elektroteknik Internasional (IEC) serupa N dan H masing-masing sesuai dengan desain NEMA B dan C.
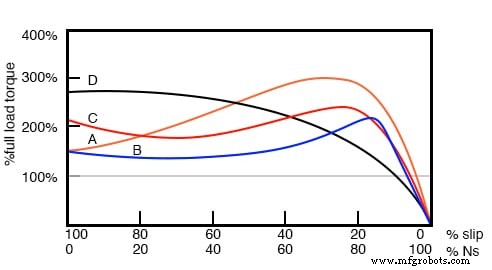
Karakteristik untuk desain NEMA
Semua motor, kecuali kelas D, beroperasi pada slip 5% atau kurang pada beban penuh.
- Kelas B (Kelas N IEC) motor adalah motor default untuk digunakan di sebagian besar aplikasi. Dengan torsi awal LRT =150% hingga 170% FLT, ia dapat memulai sebagian besar beban, tanpa arus awal yang berlebihan (LRT). Efisiensi dan faktor daya tinggi. Ini biasanya menggerakkan pompa, kipas, dan peralatan mesin.
- Kelas A torsi awal sama dengan kelas B. Torsi putus dan arus awal (LRT) lebih tinggi. Motor ini menangani kelebihan beban sementara seperti yang ditemui pada mesin cetak injeksi.
- Kelas C (Kelas H IEC) memiliki torsi awal yang lebih tinggi dari kelas A dan B pada LRT =200% dari FLT. Motor ini diterapkan pada beban awal yang sulit yang perlu digerakkan dengan kecepatan konstan seperti konveyor, penghancur, serta pompa dan kompresor reciprocating.
- Kelas D motor memiliki torsi awal (LRT) tertinggi ditambah dengan arus awal yang rendah karena slip tinggi ( 5% hingga 13% pada FLT). Slip tinggi menghasilkan kecepatan yang lebih rendah. Pengaturan kecepatannya buruk. Namun, motor unggul dalam mengemudikan beban kecepatan yang sangat bervariasi seperti yang membutuhkan roda gila penyimpan energi. Aplikasinya meliputi punch press, shear, dan elevator.
- Kelas E motor adalah versi efisiensi yang lebih tinggi dari kelas B.
- Kelas F motor memiliki LRC, LRT, dan torsi rusak yang jauh lebih rendah daripada kelas B. Motor ini menggerakkan beban yang konstan dan mudah dimulai.
Faktor Daya pada Motor Induksi
Motor induksi menghadirkan faktor daya tertinggal (induktif) ke saluran listrik. Faktor daya pada motor besar berkecepatan tinggi yang terisi penuh bisa sama menguntungkannya dengan 90% untuk motor berkecepatan tinggi yang besar. Pada beban penuh 3/4, faktor daya motor berkecepatan tinggi terbesar dapat mencapai 92%.
Faktor daya untuk motor kecil berkecepatan rendah bisa serendah 50%. Saat memulai, faktor daya dapat berada dalam kisaran 10% hingga 25%, meningkat saat rotor mencapai kecepatan.
Faktor daya (PF) sangat bervariasi dengan beban mekanis motor (gambar di bawah). Motor tanpa beban dianalogikan dengan transformator tanpa beban resistif pada sekunder. Sedikit hambatan dipantulkan dari sekunder (rotor) ke primer (stator).
Jadi saluran listrik melihat beban reaktif, serendah 10% PF. Saat rotor dibebani, komponen resistif yang meningkat dipantulkan dari rotor ke stator, meningkatkan faktor daya.
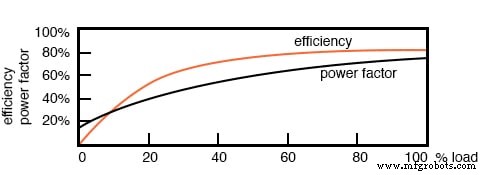
Faktor daya dan efisiensi motor induksi
Efisiensi Motor Induksi
Motor tiga fase yang besar lebih efisien daripada motor tiga fase yang lebih kecil, dan hampir semua motor satu fase. Efisiensi motor induksi besar dapat mencapai 95% pada beban penuh, meskipun 90% lebih umum.
Efisiensi untuk motor induksi dengan beban ringan atau tanpa beban buruk karena sebagian besar arus terlibat dengan mempertahankan fluks magnetisasi. Ketika beban torsi meningkat, lebih banyak arus yang dikonsumsi dalam menghasilkan torsi, sementara arus yang terkait dengan magnetisasi tetap. Efisiensi pada 75% FLT dapat sedikit lebih tinggi dari pada 100% FLT.
Efisiensi berkurang beberapa persen pada 50% FLT dan menurun beberapa persen lagi pada 25% FLT. Efisiensi hanya menjadi buruk di bawah 25% FLT. Variasi efisiensi dengan pembebanan ditunjukkan pada gambar di atas.
Motor induksi biasanya berukuran terlalu besar untuk menjamin bahwa beban mekanisnya dapat dimulai dan digerakkan dalam semua kondisi pengoperasian. Jika motor polifase dibebani kurang dari 75% torsi pengenal di mana efisiensi mencapai puncaknya, efisiensi hanya turun sedikit hingga 25% FLT.
Korektor Faktor Daya Nola
Frank Nola dari NASA mengusulkan korektor faktor daya (PFC) sebagai perangkat hemat energi untuk motor induksi satu fase pada akhir 1970-an. Hal ini didasarkan pada premis bahwa motor induksi dengan beban penuh kurang efisien dan memiliki faktor daya yang lebih rendah daripada motor dengan beban penuh. Dengan demikian, ada energi yang harus dihemat pada motor dengan beban sebagian, khususnya motor 1-φ.
Energi yang dikonsumsi dalam mempertahankan medan magnet stator relatif tetap terhadap perubahan beban. Meskipun tidak ada yang dapat disimpan dalam motor dengan beban penuh, tegangan ke motor dengan beban sebagian dapat dikurangi untuk mengurangi energi yang diperlukan untuk mempertahankan medan magnet.
Ini akan meningkatkan faktor daya dan efisiensi. Ini adalah konsep yang bagus untuk motor fase tunggal yang terkenal tidak efisien sesuai tujuannya.
Konsep ini sangat tidak berlaku untuk motor 3-fase besar. Karena efisiensinya yang tinggi (90%+), tidak banyak energi yang dapat dihemat. Selain itu, motor dengan efisiensi 95% masih 94% efisien pada torsi beban penuh (FLT) 50% dan efisiensi 90% pada FLT 25%.
The potential energy savings in going from 100% FLT to 25% FLT is the difference in efficiency 95% - 90% =5%. This is not 5% of the full load wattage but 5% of the wattage at the reduced load. The Nola power factor corrector might be applicable to a 3-phase motor which idles most of the time (below 25% FLT), like a punch press.
The payback period for the expensive electronic controller has been estimated to be unattractive for most applications. Though, it might be economical as part of an electronic motor starter or speed Control.
Induction Motors as Alternators
An induction motor may function as an alternator if it is driven by a torque at greater than 100% of the synchronous speed (figure below). This corresponds to a few % of “negative” slip, say -1% slip.
This means that as we are rotating the motor faster than the synchronous speed, the rotor is advancing 1% faster than the stator rotating magnetic field. It normally lags by 1% in a motor. Since the rotor is cutting the stator magnetic field in the opposite direction (leading), the rotor induces a voltage into the stator feeding electrical energy back into the power line.
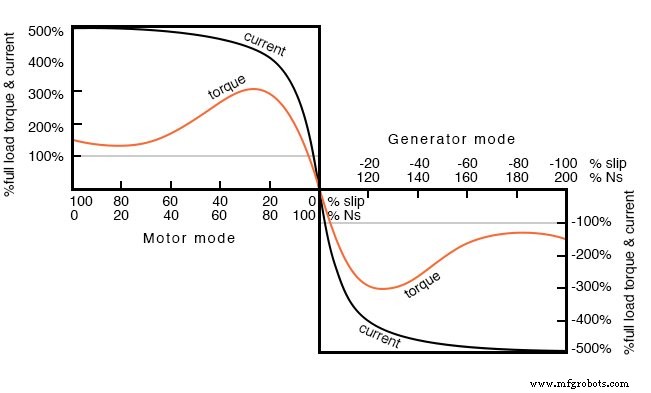
Negative torque makes induction motor into a generator
Such an induction generator must be excited by a “live” source of 50 or 60 Hz power. No power can be generated in the event of a power company power failure. This type of alternator appears to be unsuited as a standby power source.
As an auxiliary power wind turbine generator, it has the advantage of not requiring an automatic power failure disconnect switch to protect repair crews.
It is fail-safe.
Small remote (from the power grid) installations may be made self-exciting by placing capacitors in parallel with the stator phases. If the load is removed residual magnetism may generate a small amount of current flow.
This current is allowed to flow by the capacitors without dissipating power. As the generator is brought up to full speed, the current flow increases to supply a magnetizing current to the stator. The load may be applied at this point. Voltage regulation is poor. An induction motor may be converted to a self-excited generator by the addition of capacitors.
Startup procedure is to bring the wind turbine up to speed in motor mode by application of normal power line voltage to the stator. Any wind-induced turbine speed in excess of synchronous speed will develop negative torque, feeding power back into the power line, reversing the normal direction of the electric kilowatt-hour meter.
Whereas an induction motor presents a lagging power factor to the power line, an induction alternator presents a leading power factor. Induction generators are not widely used in conventional power plants.
The speed of the steam turbine drive is steady and controllable as required by synchronous alternators. Synchronous alternators are also more efficient.
The speed of a wind turbine is difficult to control and subject to wind speed variation by gusts. An induction alternator is better able to cope with these variations due to the inherent slip. This stresses the gear train and mechanical components less than a synchronous generator.
However, this allowable speed variation only amounts to about 1%. Thus, a direct line connected induction generator is considered to be fixed-speed in a wind turbine (See Doubly-fed induction generator for a true variable speed alternator).
Multiple generators or multiple windings on a common shaft may be switched to provide a high and low speed to accommodate variable wind conditions.
Motor Starting and Speed Control
Some induction motors can draw over 1000% of full load current during starting; though, a few hundred percents is more common. Small motors of a few kilowatts or smaller can be started by direct connection to the power line.
Starting large motors can cause line voltage sag, affecting other loads. Motor-start rated circuit breakers (analogous to slow blow fuses) should replace standard circuit breakers for starting motors of a few kilowatts. This breaker accepts high overcurrent for the duration of starting.
Autotransformer induction motor starter
Motors over 50 kW use motor starters to reduce line current from several hundred to a few hundred percents of full load current. An intermittent duty autotransformer may reduce the stator voltage for a fraction of a minute during the start interval, followed by application of full line voltage as in the figure above.
Closure of the S contacts applies reduced voltage during the start interval. The S contacts open and the R contacts close after starting. This reduces starting current to, say, 200% of full load current. Since the autotransformer is only used for the short start interval, it may be sized considerably smaller than a continuous-duty unit.
Running Three-Phase Motors on Single-Phase Provisions
Three-phase motors will run on single phase as readily as single-phase motors. The only problem for either motor is starting. Sometimes 3-phase motors are purchased for use on single-phase if three-phase provisioning is anticipated.
The power rating needs to be 50% larger than for a comparable single phase motor to make up for one unused winding. Single-phase is applied to a pair of windings simultaneous with a start capacitor in series with the third winding.
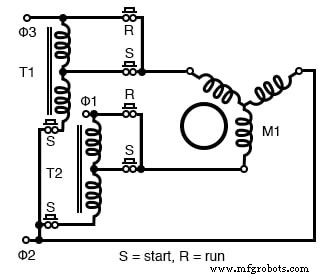
The start switch is opened in the figure below upon motor start. Sometimes a smaller capacitor than the start capacitor is retained while running.
Starting a three-phase motor on single phase
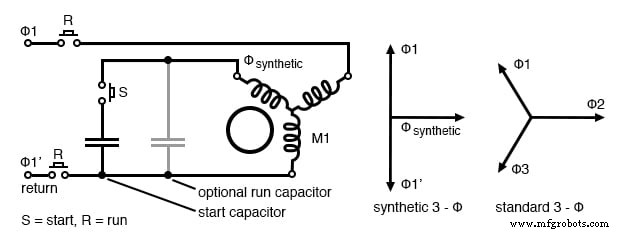
The circuit in the figure above for running a three-phase motor on single phase is known as a static phase converter if the motor shaft is not loaded. Moreover, the motor acts as a 3-phase generator.
Three-phase power may be tapped off from the three stator windings for powering other 3-phase equipment. The capacitor supplies a synthetic phase approximately midway ∠90° between the ∠180° single-phase power source terminals for starting.
While running, the motor generates approximately standard 3-φ, as shown above. Matt Isserstedt shows a complete design for powering a home machine shop.
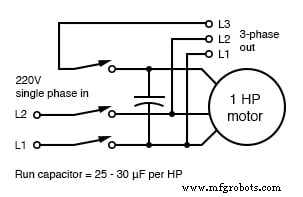
Self-starting static phase converter. Run capacitor =25-30µF per HP. Adapted from Figure 7, Hanrahan
Since a static phase converter has no torque load, it may be started with a capacitor considerably smaller than a normal start capacitor. If it is small enough, it may be left in the circuit as a run-capacitor (See the figure above).
However, smaller run-capacitors result in better 3-phase power output. Moreover, adjustment of these capacitors to equalize the currents as measured in the three phases results in the most efficient machine. However, a large start capacitor is required for about a second to quickly start the converter. Hanrahan provides construction details.
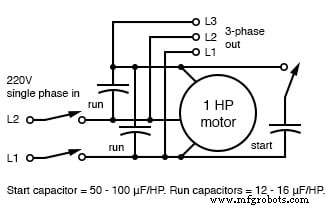
More efficient static phase converter. Start capacitor =50-100µF/HP. Run capacitors =12-16µF/HP. Adapted from Figure 1, Hanrahan
Induction Motors with Multiple Fields
Induction motors may contain multiple field windings, for example, a 4-pole and an 8-pole winding corresponding to 1800 and 900 rpm synchronous speeds. Energizing one field or the other is less complex than rewiring the stator coils.
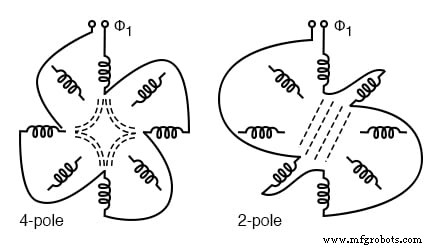
Multiple fields allow speed change
If the field is segmented with leads brought out, it may be rewired (or switched) from 4-pole to 2-pole as shown above for a 2-phase motor. The 22.5° segments are switchable to 45° segments. Only the wiring for one phase is shown above for clarity.
Thus, our induction motor may run at multiple speeds. When switching the above 60 Hz motor from 4 poles to 2 poles the synchronous speed increases from 1800 rpm to 3600 rpm.
Q: If the motor is driven by 50 Hz, what would be the corresponding 4-pole and 2-pole synchronous speeds?
A:
Ns =120f/P =120*50/4 =1500 rpm (4-pole) Ns =3000 rpm (2-pole)
Induction Motors with Variable Voltage
The speed of small squirrel cage induction motors for applications such as driving fans may be changed by reducing the line voltage. This reduces the torque available to the load which reduces the speed (see figure below).
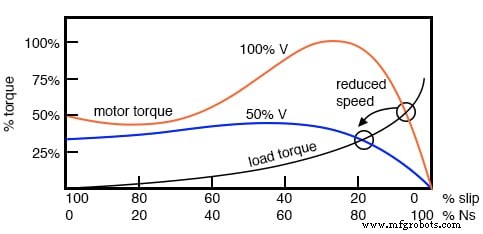
Variable voltage controls induction motor speed
Electronic Speed Control in Induction Motors
Modern solid-state electronics increase the options for speed control. By changing the 50 or 60 Hz line frequency to higher or lower values, the synchronous speed of the motor may be changed. However, decreasing the frequency of the current fed to the motor also decreases reactance XL which increases the stator current.
This may cause the stator magnetic circuit to saturate with disastrous results. In practice, the voltage to the motor needs to be decreased when the frequency is decreased.
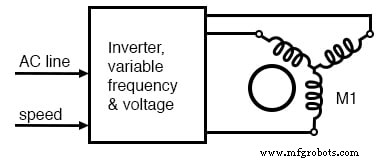
Electronic variable speed drive
Conversely, the drive frequency may be increased to increase the synchronous speed of the motor. However, the voltage needs to be increased to overcome increasing reactance to keep current up to a normal value and maintain torque.
The inverter approximates sine waves to the motor with pulse width modulation outputs. This is a chopped waveform which is either on or off, high or low, the percentage of “on” time corresponds to the instantaneous sine wave voltage.
Once electronics is applied to induction motor control, many control methods are available, varying from the simple to complex:
- Scalar Control: Low-cost method described above to control only voltage and frequency, without feedback.
- Vector Control: Also known as a vector phase control. The flux and torque producing components of stator current are measured or estimated on a real-time basis to enhance the motor torque-speed curve. This is computation intensive.
- Direct Torque Control: An elaborate adaptive motor model allows more direct control of flux and torque without feedback. This method quickly responds to load changes.
Tesla Polyphase Induction Motors Summary
- A polyphase induction motor consists of a polyphase winding embedded in a laminated stator and a conductive squirrel-cage embedded in a laminated rotor.
- Three-phase currents flowing within the stator create a rotating magnetic field which induces a current and consequent magnetic field in the rotor. Rotor torque is developed as the rotor slips a little behind the rotating stator field.
- Unlike single-phase motors, polyphase induction motors are self-starting.
- Motor starters minimize loading of the power line while providing a larger starting torque than required during running. Line current reducing starters are only required for large motors.
- Three-phase motors will run on single phase if started.
- A static phase converter is a three-phase motor running on single phase having no shaft load, generating a 3-phase output.
- Multiple field windings can be rewired for multiple discrete motor speeds by changing the number of poles.
Linear Induction Motors
The wound stator and the squirrel cage rotor of an induction motor may be cut at the circumference and unrolled into a linear induction motor. The direction of linear travel is controlled by the sequence of the drive to the stator phases.
The linear induction motor has been proposed as a drive for high-speed passenger trains. Up to this point, the linear induction motor with the accompanying magnetic repulsion levitation system required for a smooth ride has been too costly for all but experimental installations.
However, the linear induction motor is scheduled to replace steam-driven catapult aircraft launch systems on the next generation of the naval aircraft carrier, CVNX-1, in 2013. This will increase efficiency and reduce maintenance.
LEMBAR KERJA TERKAIT:
- AC Motor Theory Worksheet


