Motor DC Tanpa Kuas
Motor DC brushless dikembangkan dari motor DC brushed konvensional dengan ketersediaan semikonduktor daya solid-state. Jadi, mengapa kita membahas motor DC brushless dalam bab tentang motor AC?
Motor DC brushless mirip dengan motor sinkron AC. Perbedaan utama adalah bahwa motor sinkron mengembangkan kembali sinusoidal EMF , dibandingkan dengan EMF belakang persegi panjang, atau trapesium, untuk motor DC brushless.
Keduanya memiliki stator yang menciptakan medan magnet berputar yang menghasilkan torsi pada rotor magnet.
Motor sinkron biasanya berukuran besar multi-kilowatt, seringkali dengan rotor elektromagnet. Motor sinkron sejati dianggap sebagai kecepatan tunggal, submultiple dari frekuensi saluran listrik. Motor DC brushless cenderung berukuran kecil– beberapa watt hingga puluhan watt, dengan rotor magnet permanen.
Kecepatan motor DC brushless tidak tetap kecuali digerakkan oleh loop terkunci bertahap yang bekerja pada frekuensi referensi. Gaya konstruksinya berbentuk silinder atau panekuk.
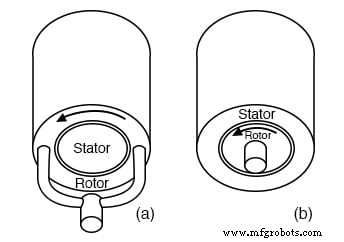
Konstruksi silinder:(a) rotor luar, (b) rotor dalam
Konstruksi yang paling umum, silindris, dapat mengambil dua bentuk (gambar di atas). Gaya silinder yang paling umum adalah dengan rotor di bagian dalam, kanan atas. Gaya motor ini digunakan dalam hard disk drive. Dimungkinkan juga untuk menempatkan rotor di bagian luar yang mengelilingi stator.
Seperti halnya dengan motor kipas DC brushless, tanpa poros. Gaya konstruksi ini mungkin pendek dan kokoh. Namun, arah fluks magnet adalah radial terhadap sumbu rotasi.
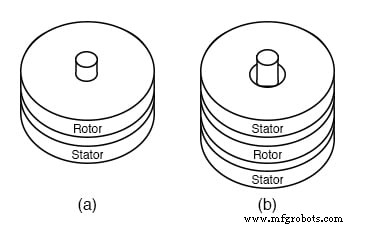
Konstruksi motor pancake:(a) stator tunggal, (b) stator ganda
Motor pancake torsi tinggi mungkin memiliki kumparan stator di kedua sisi rotor (gambar di atas-b).
Aplikasi torsi yang lebih rendah seperti motor penggerak floppy disk cukup dengan kumparan stator di satu sisi rotor, (Gambar di atas-a). Arah fluks magnet adalah aksial, yaitu sejajar dengan sumbu rotasi.
Fungsi pergantian dapat dilakukan oleh berbagai sensor posisi poros:enkoder optik, enkoder magnetik (penyelesai, sinkronisasi, dll), atau sensor magnetik efek Hall. Motor kecil yang murah menggunakan sensor efek Hall.
Sensor efek Hall adalah perangkat semikonduktor di mana aliran elektron dipengaruhi oleh medan magnet yang tegak lurus terhadap arah aliran arus. Sepertinya jaringan resistor variabel empat terminal. Tegangan pada dua keluaran saling melengkapi.
Penerapan medan magnet ke sensor menyebabkan perubahan tegangan kecil pada output. Output Hall dapat menggerakkan komparator untuk menyediakan drive yang lebih stabil ke perangkat listrik. Atau, ini dapat menggerakkan tahap transistor majemuk jika dibias dengan benar.
Sensor efek Hall yang lebih modern mungkin berisi amplifier terintegrasi dan sirkuit digital. Perangkat 3-lead ini dapat secara langsung menggerakkan transistor daya yang memberi makan belitan fase. Sensor harus dipasang dekat dengan rotor magnet permanen untuk merasakan posisinya.

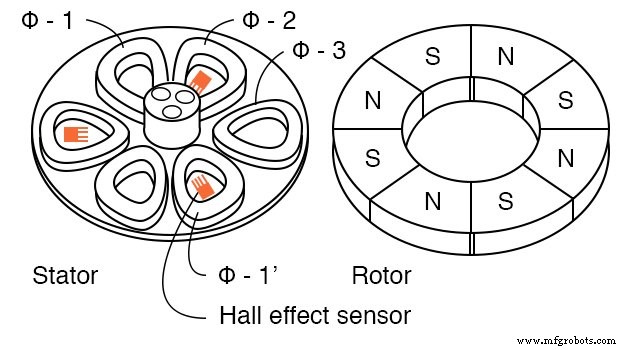
Sensor efek hall menggerakkan 3-φ motor DC brushless
Motor 3- silinder sederhana (gambar di atas) diubah oleh perangkat efek Hall untuk masing-masing dari tiga fase stator. Perubahan posisi dari rotor magnet permanen dirasakan oleh perangkat Hall sebagai polaritas dari perubahan kutub rotor yang lewat.
Sinyal Hall ini diperkuat sehingga kumparan stator digerakkan dengan arus yang tepat. Tidak ditampilkan di sini, sinyal Hall dapat diproses dengan logika kombinatorial untuk bentuk gelombang penggerak yang lebih efisien.
Motor silinder di atas dapat menggerakkan hard drive jika dilengkapi dengan fase penguncian loop (PLL) untuk mempertahankan kecepatan konstan. Sirkuit serupa dapat menggerakkan motor penggerak floppy disk pancake (gambar di bawah). Sekali lagi, itu akan membutuhkan PLL untuk mempertahankan kecepatan konstan.
Motor pancake tanpa sikat
Motor pancake 3-φ memiliki kutub 6-stator dan kutub 8-rotor. Rotor adalah cincin ferit datar yang dimagnetisasi dengan delapan kutub magnet bolak-balik secara aksial. Kami tidak menunjukkan bahwa rotor ditutup oleh pelat baja ringan untuk dipasang ke bantalan di tengah stator.
Pelat baja juga membantu melengkapi sirkuit magnetik. Kutub stator juga dipasang di atas pelat baja, membantu menutup sirkuit magnetik.
Kumparan stator datar berbentuk trapesium agar lebih pas dengan kumparan, dan mendekati kutub rotor. Kumparan 6-stator terdiri dari tiga fase belitan.
Jika tiga fase stator diberi energi secara berurutan, medan magnet yang berputar akan dihasilkan.
Rotor magnet permanen akan mengikuti seperti dalam kasus motor sinkron. Rotor dua kutub akan mengikuti medan ini pada kecepatan putaran yang sama dengan medan putar. Namun, rotor 8 kutub kami akan berputar pada submultiple dari kecepatan ini karena kutub tambahan di rotor.
Motor kipas DC tanpa sikat memiliki fitur berikut:

Motor kipas tanpa sikat, 2-φ
- Stator memiliki 2 fase yang terdistribusi di antara 4 kutub
- Ada 4 kutub menonjol tanpa belitan untuk menghilangkan titik torsi nol.
- Rotor memiliki empat kutub penggerak utama.
- Rotor memiliki 8 kutub yang ditumpangkan untuk membantu menghilangkan titik torsi nol.
- Sensor efek Hall ditempatkan pada 45o fisik.
- Rumah kipas ditempatkan di atas rotor, yang ditempatkan di atas stator.
Tujuan dari motor kipas brushless adalah untuk meminimalkan biaya pembuatan. Ini merupakan insentif untuk memindahkan produk berkinerja lebih rendah dari konfigurasi 3-φ ke 2-. Tergantung pada cara penggeraknya, motor ini dapat disebut sebagai motor 4-φ.
Anda mungkin ingat bahwa motor DC konvensional tidak dapat memiliki jumlah kutub angker genap (2, 4, dst.) jika mereka ingin memulai sendiri, 3, 5, 7 menjadi umum. Dengan demikian, motor hipotetis 4-kutub mungkin berhenti pada torsi minimum, di mana motor tersebut tidak dapat dihidupkan dari keadaan diam.
Penambahan empat kutub menonjol kecil tanpa belitan melapiskan torsi riak pada kurva torsi vs posisi. Ketika torsi riak ini ditambahkan ke kurva torsi berenergi normal, hasilnya adalah torsi minimum dihilangkan sebagian.
Hal ini memungkinkan untuk menghidupkan motor untuk semua posisi berhenti yang memungkinkan. Penambahan delapan kutub magnet permanen ke rotor magnet permanen 4 kutub normal menempatkan torsi riak harmonik kedua kecil pada torsi riak 4 kutub normal.
Ini selanjutnya menghilangkan torsi minimum. Selama torsi minima tidak turun ke nol, kita harus bisa menghidupkan motor. Semakin sukses kita dalam menghilangkan torsi minimal, semakin mudah motor untuk distarter.
Stator 2-φ mengharuskan sensor Hall diberi jarak 90° listrik. Jika rotornya adalah rotor 2 kutub, sensor Hall akan ditempatkan 90° fisik. Karena kita memiliki rotor magnet permanen 4 kutub, sensor harus ditempatkan 45° fisik untuk mencapai 90° jarak listrik. (Perhatikan jarak Hall di atas.)
Mayoritas torsi disebabkan oleh interaksi kumparan 2- stator bagian dalam dengan bagian rotor 4-kutub. Selain itu, bagian rotor 4 kutub harus berada di bagian bawah sehingga sensor Hall akan merasakan sinyal pergantian yang tepat.
Bagian rotor 8 kutub hanya untuk meningkatkan start motor.

Motor DC 2- drive push-pull tanpa sikat
Pada gambar di atas, penggerak dorong-tarik 2- (juga dikenal sebagai penggerak 4-) menggunakan dua sensor efek Hall untuk menggerakkan empat belitan. Sensor diberi jarak 90° listrik terpisah, yaitu 90° fisik untuk rotor kutub tunggal.
Karena sensor Hall memiliki dua keluaran yang saling melengkapi, satu sensor menyediakan pergantian untuk dua belitan yang berlawanan.


