Pengontrol Level Air Sepenuhnya Otomatis menggunakan SRF04
Pengontrol Ketinggian Air Otomatis Penuh menggunakan SRF04, L293D &PIC16F84A
Pengantar Pengontrol Ketinggian Air Otomatis
Memantau dan mengontrol ketinggian air di tangki air adalah salah satu pekerjaan terpenting di hampir banyak area perumahan dan komersial. Dalam kebanyakan kasus, terutama di bangunan tempat tinggal, karena tidak tersedianya sarana otomatis apa pun, menjadi melelahkan dan tidak nyaman untuk sering memantau ketinggian air di dalam tangki. Bahkan, untuk tempat-tempat yang kekurangan air, luapan air akan menjadi hal yang cukup mahal untuk dibayar.
Satu-satunya solusi untuk masalah di atas adalah memiliki cara otomatis untuk memantau dan mengontrol ketinggian air. Meskipun ada banyak teknik seperti menggunakan sensor jarak, menggunakan probe arus, menggunakan ranger ultrasonik, dll., di sini kita akan fokus menggunakan ranger ultrasonik.

- Proyek Terkait: Sirkuit Alarm Hujan – Proyek Pendeteksi Salju, Air, dan Hujan
Ikhtisar Sistem Pengontrol Ketinggian Air
Sistem ini terdiri dari sensor rentang ultrasonik yang ditempatkan di atas tangki sehingga setelah dipicu, ia mengirimkan sinyal ultrasonik. Air yang ada di tangki akan memantulkan sinyal. Sensor akan menerima sinyal ini dan waktu yang dibutuhkan antara dua sinyal ini memberikan perkiraan tentang jarak yang ditempuh oleh sinyal, sehingga ketinggian air dari atas.
Di sini mikrokontroler digunakan untuk mengirim sinyal pemicu ke ranger ultrasonik. Setelah gema diterima, jeda waktu antara dua pulsa dihitung dan ini berbanding lurus dengan ketinggian air. Jeda waktu dihitung dengan bantuan Timer, yang jumlah pulsa penghitungannya menunjukkan jarak yang ditempuh oleh sinyal, atau ketinggian air.
Karena disini ranger ditempatkan di atas tangki, kontrol aliran air dilakukan dengan mempertimbangkan ketinggian air dari atas tangki. Misalnya, jika rentang pengukuran ditemukan antara 0 hingga 1 cm, tangki akan meluap dan mikrokontroler mengirimkan sinyal kontrol untuk memutar motor ke arah sebaliknya, untuk menghilangkan kelebihan air. ‘
Jika jarak antara 2 hingga 5 cm, tangki penuh dan mikrokontroler mengirimkan sinyal kontrol untuk mematikan motor. Jika jarak di atas 5cm, tangki hampir kosong dan mikrokontroler mengirimkan sinyal kontrol untuk memutar motor ke arah depan.
Diagram Sirkuit Pengontrol Ketinggian Air Otomatis
Klik gambar untuk memperbesar
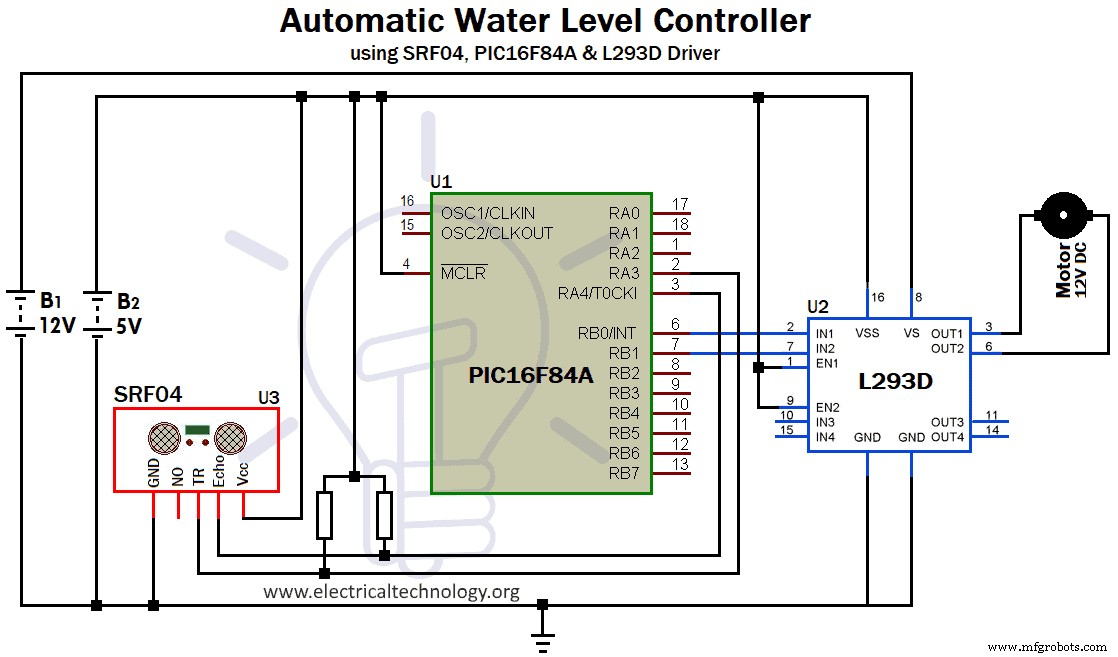
Gambar 1:Pengontrol Ketinggian Air
Deskripsi Bagian
Komponen berikut akan digunakan untuk mendesain sirkuit.
- Pencari Jangkauan Ultrasonik SRF04
- Mikrokontroler PIC PIC16F84A
- Pengemudi Motor L293D
- Motor DC
- Dua Resistor 1K
Mari kita memiliki gambaran singkat tentang setiap komponen
Pencari Jangkauan Ultrasonik SRF04 :
SRF04 adalah ranger ultrasonik berkualitas tinggi yang digunakan di banyak aplikasi robot untuk memudahkan pendeteksian rintangan. Ini membutuhkan sinyal 10 mikrodetik untuk dipicu. 
Gambar 2:Pencari Jangkauan Ultrasonik SRF04
Setelah dipicu, ia mengirimkan 8 pulsa ultrasound, pada frekuensi 40 KHz dan secara bersamaan mengirimkan peningkatan garis gema ke TINGGI. Setelah menerima sinyal yang dipantulkan atau gema, ia menurunkan garis gema ke RENDAH.
Dengan demikian, lebar pulsa gema menunjukkan jarak yang ditempuh oleh sinyal atau dengan kata lain jarak dari ranger ke objek. Oleh karena itu, garis gema adalah pulsa yang lebarnya sebanding dengan jarak ke objek. Untuk 1cm, lebar pulsa gema adalah 58 mikrodetik. 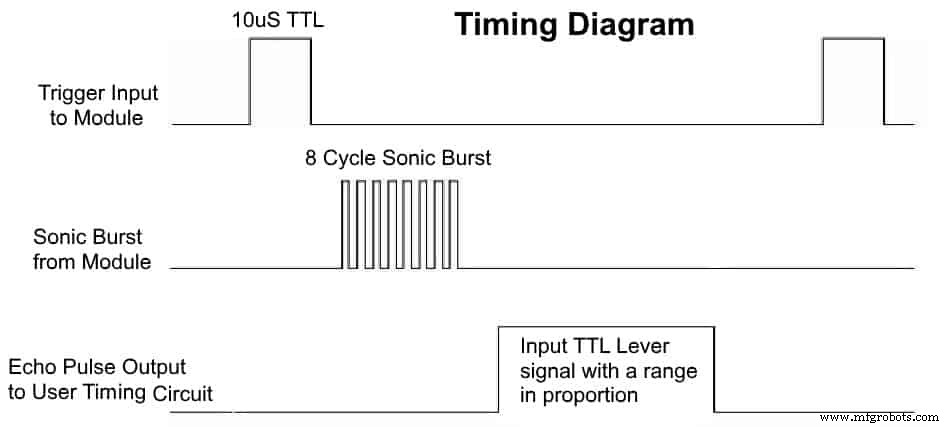
Gambar 3:Diagram Waktu SRF04
Mikrokontroler PIC PIC16F84A:
Gambar 4:Mikrokontroler PIC PIC16F84A
Ini adalah Mikrokontroler Flash 8-bit, 18 pin yang kompatibel dengan CMOS dengan Timer 8-bit tunggal (dengan prescaler 8-bit yang dapat diprogram). Operasi Timer dikendalikan menggunakan register berikut – OPTION_REG, TMR0 dan INTCON. OPTION_REG adalah register 8-bit yang memiliki
ke-5
bit (T0CS) memilih operasi penghitung waktu atau penghitung yang diperlukan.
Menyetel bit akan memilih operasi penghitung sedangkan menghapusnya akan memilih operasi pengatur waktu. TMR0 adalah register timer, sedangkan INTCON adalah register interupsi yang ke-5
bit (T0IE) menunjukkan flag timer, yaitu mengatur ketika Timer meluap. 
Pengemudi Motor L293D:
Gambar 5:IC Driver Motor L293D
Ini adalah IC driver motor DC berbasis H-bridge 16 pin. Ini memiliki kapasitas untuk menggerakkan dua motor dan di kedua arah. Ini terdiri dari dua pin aktif (Pin1 dan 9) yang ketika diatur ke TINGGI, mengaktifkan operasi IC. Ini pada dasarnya bertindak sebagai antarmuka antara mikrokontroler dan motor DC. Ini terdiri dari empat pin input – dua untuk setiap rangkaian H-bridge. Diberikan di bawah ini adalah tabel yang menunjukkan kontrol motor. 
| IN1(Pin 2) | IN2 (Pin 7) | EN1 (Pin 1) | Operasi Motor |
| TINGGI | TINGGI | TINGGI | MATI |
| RENDAH | RENDAH | TINGGI | NONAKTIF |
| TINGGI | RENDAH | TINGGI | AKTIF (Searah jarum jam) |
| RENDAH | TINGGI | TINGGI | AKTIF (Berlawanan arah jarum jam) |
| X | X | RENDAH | MATI |
Catatan:Karena SRF04 adalah perangkat yang kompatibel dengan TTL dan PIC16F84A adalah kompatibel dengan CMOS, kami menggunakan resistor pull up dengan nilai 1K, untuk mengimbangi perubahan level tegangan.
Kerja &Pengoperasian Pengontrol Ketinggian Air Otomatis
Program ditulis sedemikian rupa sehingga pulsa 10 mikrodetik dikirim dari mikrokontroler untuk memicu ranger ultrasonik. Ini ditulis menggunakan fungsi delay. Register timer, TMR0 diisi dengan nilai desimal 200, sehingga menghasilkan 55 hitungan.
Keluaran dari SRF04, sinyal gema diterima di pin RA4 (Pin jam Timer, sehingga memberikan pulsa clock eksternal ke timer). Setelah sinyal gema membuat transisi dari TINGGI ke RENDAH, pengatur waktu diaktifkan. Saat timer menghitung, bit flag interupsi, T0IE, dipantau. Setelah diatur, timer dinonaktifkan.
Prosedur ini diulang untuk pulsa gema lain dan seterusnya. Berapa kali timer beroperasi dihitung dan ini menunjukkan jumlah pulsa gema. Karena setiap pulsa gema adalah 58 mikrodetik, itu menunjukkan 1 cm. Jadi, 5 pulsa gema akan menunjukkan 5cm. Nilai hitungan ini, disimpan dalam bilangan bulat, digunakan untuk mengontrol motor DC.
Jika nilainya antara 2 hingga 5, mikrokontroler mengirimkan sinyal HIGH ke pin RB0 dan RB1 (masing-masing terhubung ke IN1 dan IN2 dari L293D), untuk mematikan motor. Jika nilainya antara 5 sampai 20, mikrokontroler mengirimkan sinyal HIGH ke IN1 dan sinyal LOW ke IN2, untuk menghidupkan motor dan memutarnya searah jarum jam. Jika nilainya antara 0 sampai 1, mikrokontroler mengirimkan sinyal LOW ke IN1 dan sinyal HIGH ke IN2, untuk menghidupkan motor dan memutarnya berlawanan arah jarum jam.
Kelebihan Pengontrol Ketinggian Air Otomatis menggunakan SRF04
- Ini akan menjadi sistem yang sederhana dan nyaman.
- Ini akan menjadi sistem berbiaya rendah karena penggunaan komponen berbiaya rendah.
- Menggunakan teknik otomatis akan menghilangkan rintangan yang dihadapi dalam pengendalian ketinggian air menggunakan cara manual.
- Karena tidak ada bagian mekanis yang digunakan, ini akan menghilangkan risiko keausan mekanis atau korosi.
Kekurangan Pengontrol Ketinggian Air Otomatis
- Pencari jangkauan ultrasonik, SRF04, akan mengalami redaman karena penggunaan banyak elektronik dan karenanya harus diisolasi dengan benar.
- Sistem ini dirancang sedemikian rupa sehingga sensor serta aktuator perlu ditempatkan berdekatan satu sama lain. Dalam bahasa awam, sistem kontrol ini untuk tempat-tempat di mana tangki air dekat dengan pompa air. Jadi, untuk banyak bangunan di mana pompa submersible digunakan dan tangki air berada di atap, sistem Pengontrol Ketinggian Air Otomatis ini tidak dapat digunakan. Namun, ini dapat dimodifikasi dengan menggunakan sirkuit komunikasi.


