Tentang proyek ini
Seorang pembuat selalu peka terhadap hal-hal baru dan lucu. Suatu hari, saya menonton video di mana bunga matahari bergerak bersama matahari. Saya memiliki wawasan yang tiba-tiba saat itu. Mengapa saya tidak dapat membuat perangkat elektronik yang meniru biomekanisme ini.
Pada hari-hari berikutnya, saya mulai melaksanakan proyek pelacak surya saya. Saya memilih crowtail sebagai papan mikrokontroler, dan mengambil komponen dan aksesori di gudang kami. Kemudian saya merakit bagian-bagian ini bersama-sama. Akhirnya, saya mengujinya menggunakan LED di ponsel saya. Anda tahu, itu bekerja dengan sempurna.
Saya sangat bersemangat dan memposting video demo di media sosial. Saya terkejut bahwa banyak orang menyukai dan membagikan video ini, dan beberapa dari mereka bahkan mengirimi saya pesan yang mengatakan bahwa mereka ingin membuat proyek ini juga.
Jadi saya membuat ulang proyek ini dan membuat tutorial khusus untuk membantu lebih banyak orang membuatnya. Ini dia.
Langkah 1:Persiapan 
Bahan-bahan yang kita butuhkan tercantum di bawah ini.
- Crowtail- Potensiometer Linier x 2
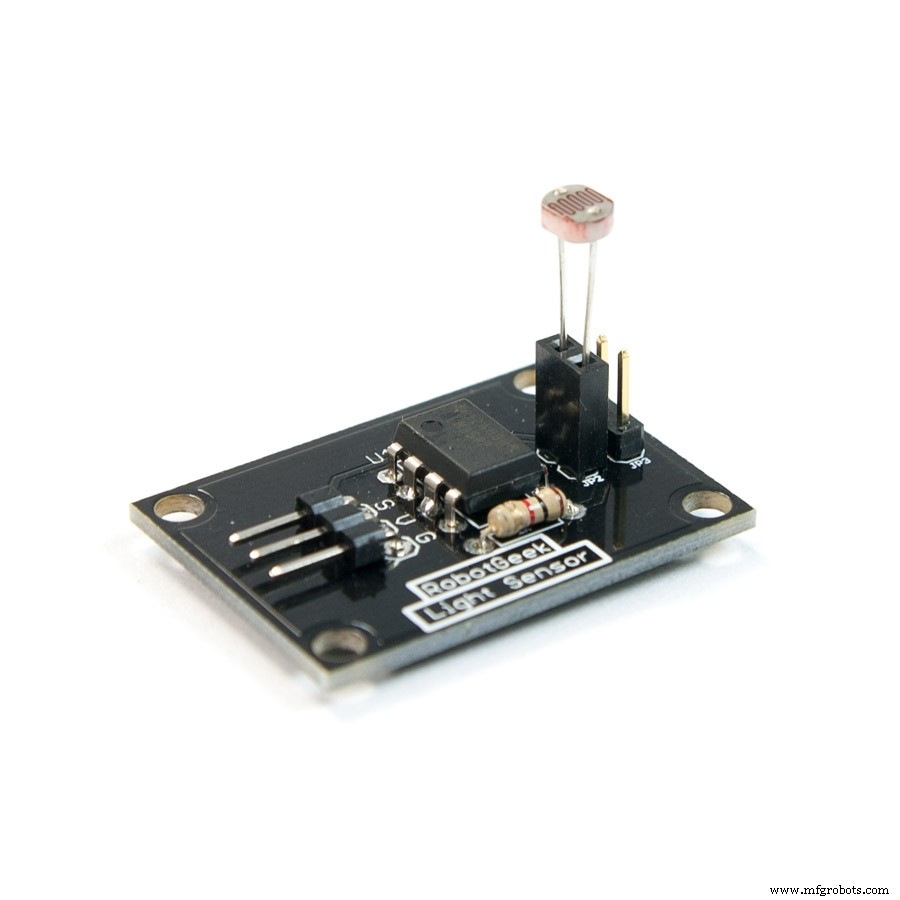
- Crowtail- Sensor Cahaya x 4
- Crowduino Dengan ATMega 328 V1.1 x 1
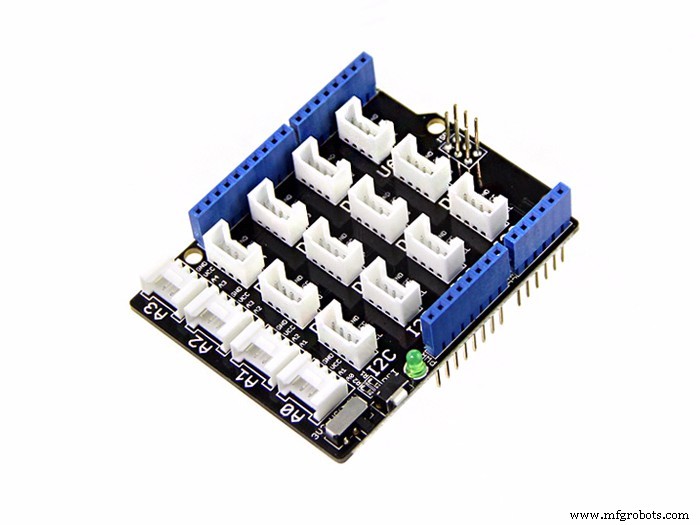
- Crowtail- Base Shield untuk Arduino x 1
Langkah 2:Jadikan Kepala Perangkat 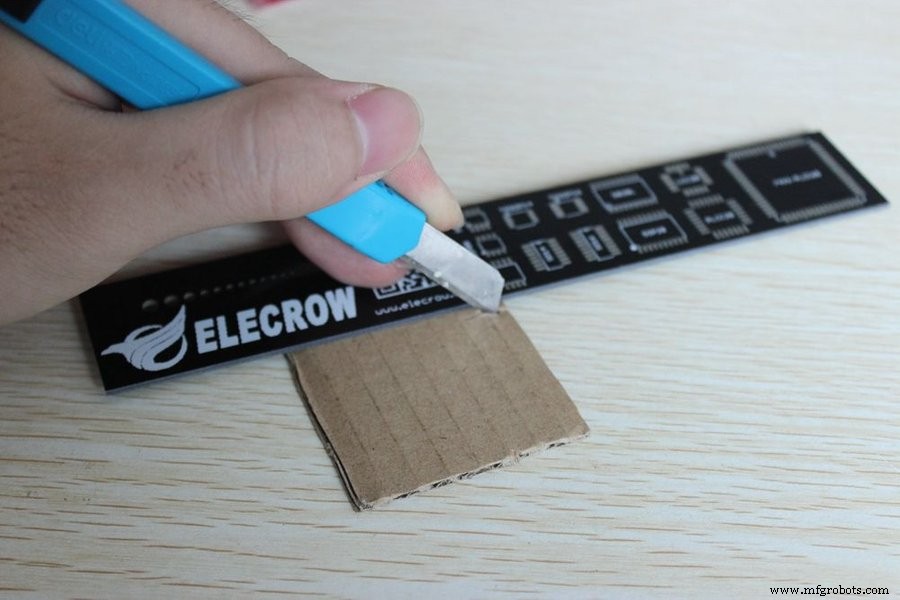



Pertama, kita perlu memotong dua potong karton seperti yang ditunjukkan gambar, hanya untuk dua bagian dari selembar karton. Kemudian potongan-potongan karton tersebut dapat dirangkai menjadi bentuk salib. Terakhir, tempelkan tongkat dengan salib, itu akan berperan sebagai "kepala", dan selalu mengarah ke matahari. Di sisi lain, ini dapat membuat perangkat menjadi cantik dan stabil.
Langkah 3:Pasang 4 Sensor Cahaya 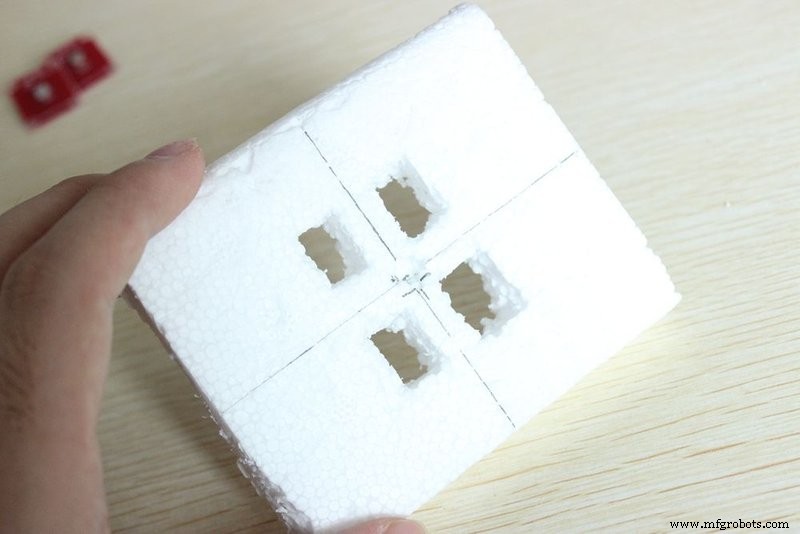
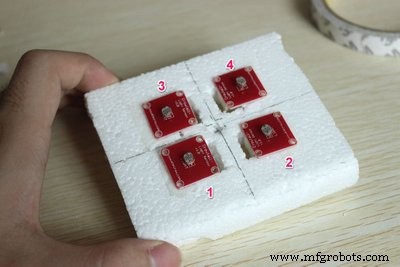

Tusuk 4 lubang yang sesuai ke dalam styrofoam untuk memasang 4 sensor, lalu gali satu lubang tengah untuk memasang stik. Saya memberi nomor pada sensor ini sehingga kami dapat membedakan penempatannya yang berbeda.
Langkah 4:Hubungkan Sensor dengan Kabel 


Gunakan lem tembak untuk menempelkan stik ke busa, lalu colokkan kabel ke sensor.
Langkah 5:Perbaiki Tongkat ke Pan-tilt 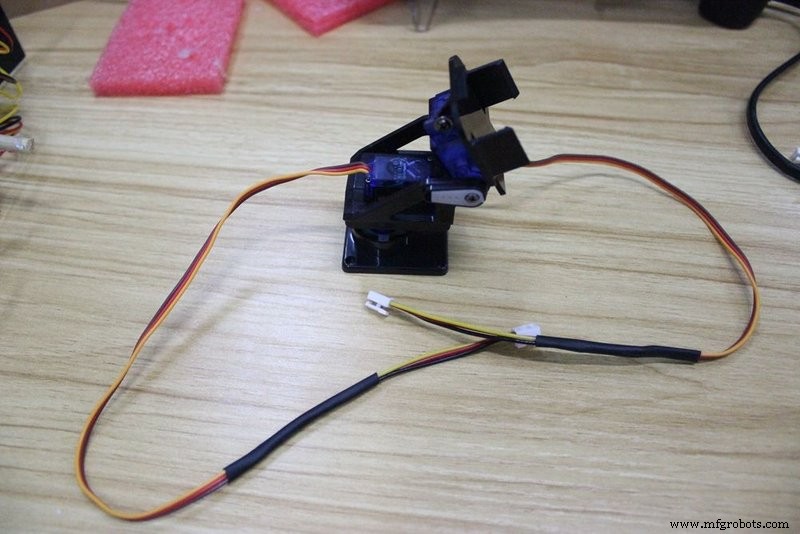
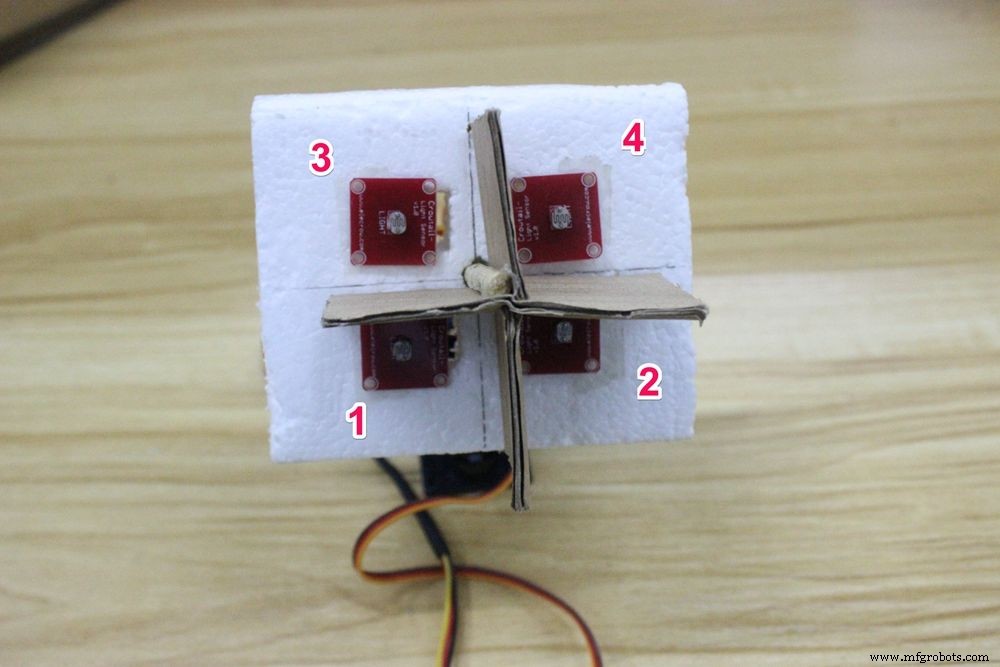
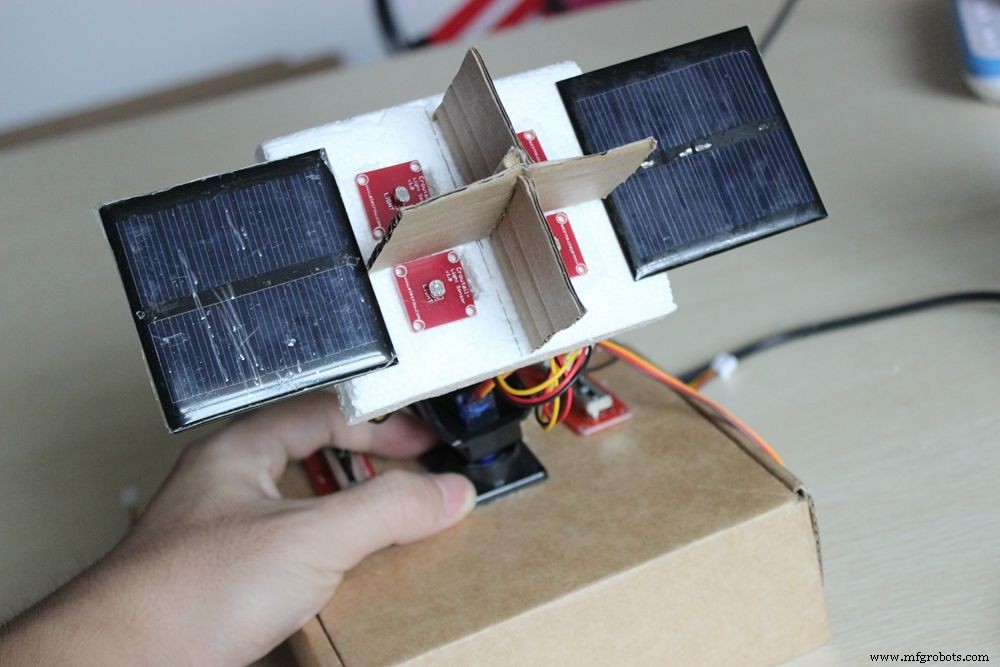

Kami memperbaiki tongkat ke kemiringan. Dudukan sensor harus tetap konsisten dengan gambar. Sensor “1” dan sensor ”2” terletak di bawah situs.
Pan-tilt adalah perangkat rakitan dengan servos 9G. Itu dapat mengontrol rotasi vertikal dan horizontal dengan 180 derajat.
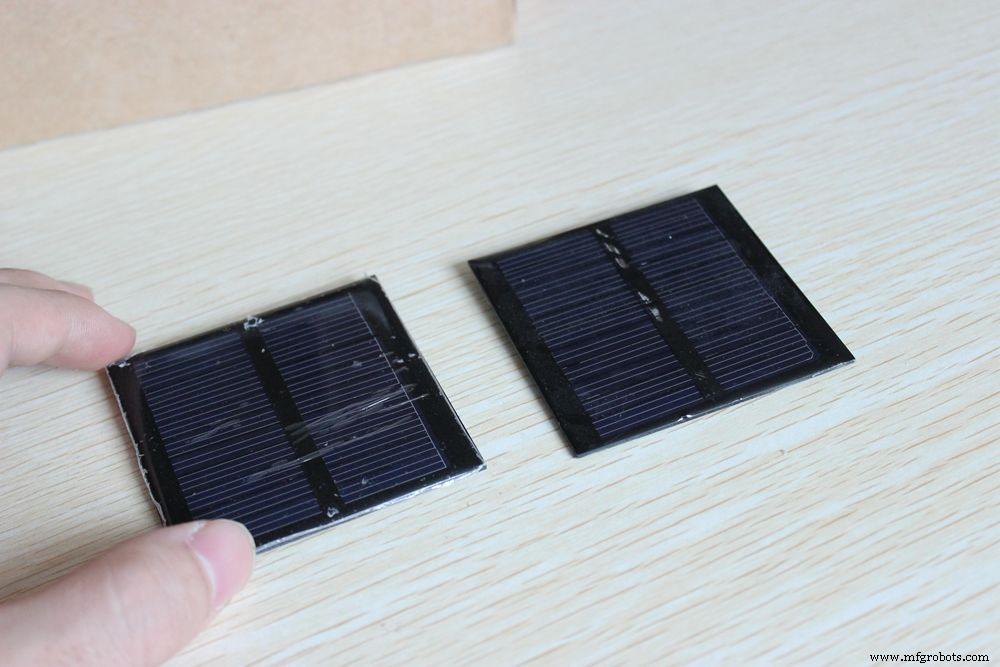
Terakhir, pasang panel surya ke busa. (Perhatikan:dua panel surya hanya untuk hiasan, tanpa fungsi catu daya.)
Langkah 6:Unggah Kode 

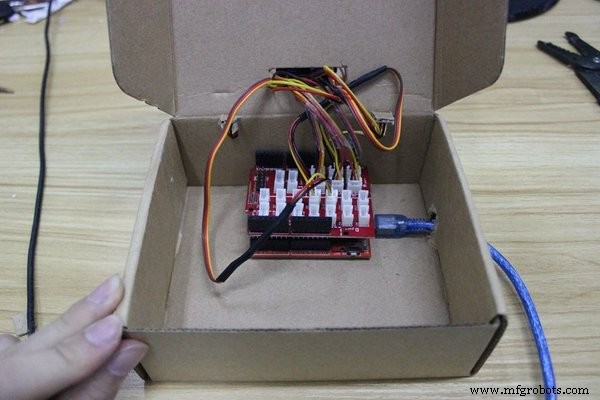
Keluarkan Crowduino dan Crowtail- Base Shield, lalu susun menjadi satu. Sebelum kita mulai menghubungkan kabel ke papan dasar, kita perlu mengunggah kode program ke Crowduino, kabel micro USB diperlukan. Hubungkan Crowduino ke komputer, dan buka Arduino IDE.
Langkah 7:Hubungkan 4 Sensor ke Perisai 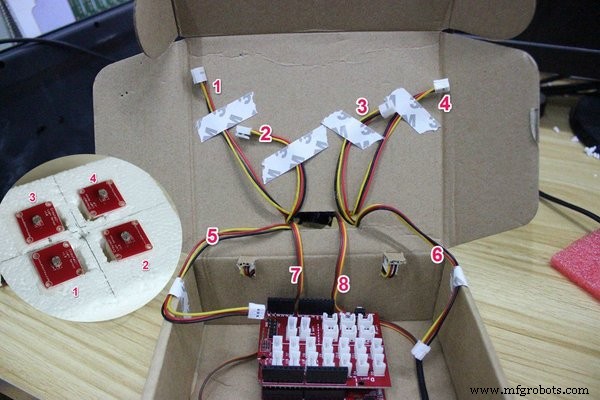
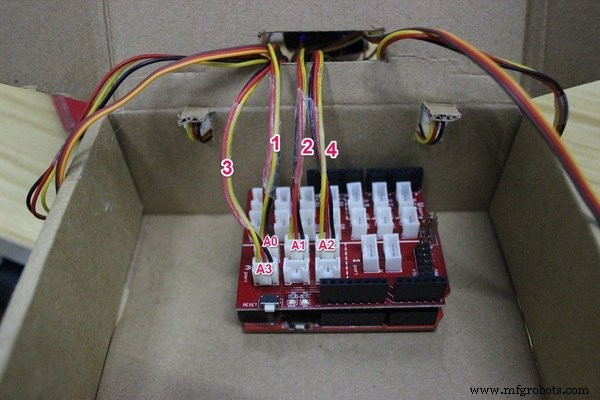
Sekarang kita bisa memulai koneksi. Pertama-tama sambungkan kabel sensor ke pelindung, dengan nomor yang sesuai satu-ke-satu seperti yang ditunjukkan gambar di atas.
1-4 kabel:
Langkah 8:Hubungkan Potensiometer ke Perisai 


Hubungkan dua potensiometer ke soket A4 dan A5 pelindung.
Tidak ada perbedaan antara kedua potensiometer, tetapi Anda harus tahu bahwa mana pun yang terhubung melalui port A4 akan berperan mengontrol penundaan waktu reaksi, dan A5 untuk kecepatan rotasi servo.
Langkah 9:Hubungkan Pan-tilt ke Shield 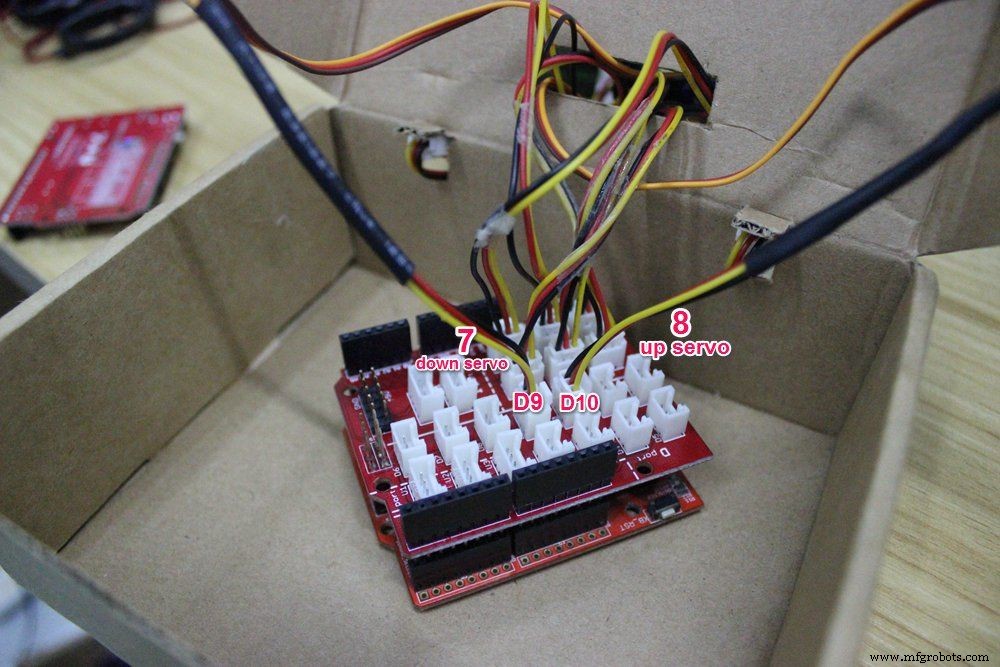
Servo bawah (gerakan horizontal) terhubung dengan D9, dan servo atas (gerakan vertikal) terhubung dengan D10.
Langkah 10:Cara Menghidupkannya 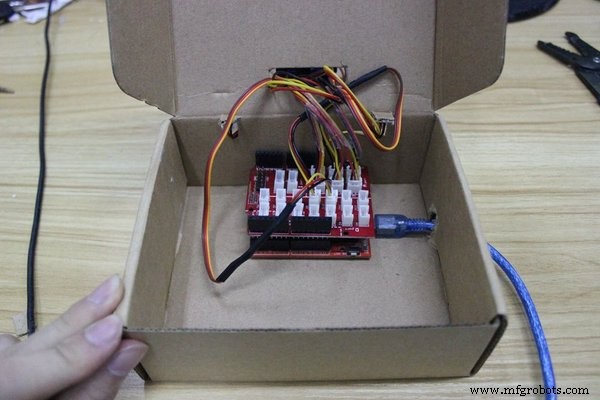

Crowduino adalah papan pengontrol utama proyek ini. Kami dapat memberi daya pada board ini dengan bank daya USB atau adaptor DC, tergantung pada Anda apakah itu perangkat seluler atau perangkat tetap.
Langkah 11:Selamat Mencoba! 
Sekarang, tutup kotaknya. Tampaknya tidak sabar untuk mengejar sinar matahari. Oke, tenang sayang, ayo kita tes sekarang.
Saya membawanya ke ruangan gelap, lalu membuka senter ponsel, dan WOW! Lihat pria imut ini!
Kelihatannya sulit tetapi sebenarnya cukup sederhana, jadi lakukan saja! Dan Anda dapat membantu membuatnya terlihat lebih kuat dan keren!
Kode
- KODE BUNGA MATAHARI ARDUINO
KODE BUNGA MATAHARI ARDUINOArduino
#include // sertakan Servo library Servo horizontal; // servoint servo horizontal =90; // berdiri horizontal servoServo vertikal; // servo vertikal int servov =90; // servo vertikal berdiri// koneksi pin LDR// nama =analogpin;int ldrrd =0; int ldrld=1;int ldrlt =2; int ldrt =3; void setup(){ Serial.begin(9600);// koneksi servo// nama.attacht(pin); horizontal.attach(9); vertical.attach(10);}void loop() { int lt =analogRead(ldrlt); // kiri atas int rt =analogRead(ldrrt); // kanan atas int ld =analogRead(ldrld); // kiri bawah int rd =analogRead(ldrd); // bawah rigt int dtime =analogRead(4)/20; // membaca potensiometer int tol =analogRead(5)/4;int avt =(lt + rt) / 2; // nilai rata-rata topint avd =(ld + rd) / 2; // nilai rata-rata turun avl =(lt + ld) / 2; // nilai rata-rata leftint avr =(rt + rd) / 2; // nilai rata-rata rightint dvert =avt - avd; // periksa selisih naik dan turun dhoriz =avl - avr;// periksa selisih kiri dan kanan (-1*tol> dvert || dvert> tol) // periksa apakah selisihnya dalam toleransi lain ubah vertikal sudut{jika (avt> avd){servov =++servov;jika (servov> 180){servov =180;}}else jika (avt dhoriz || dhoriz> tol) // periksa apakah ada perbedaan dalam toleransi atau ubah sudut horizontal{if (avl> avr){servoh =--servoh;if (servoh <0){servoh =0;}}else if (avl 180){servoh =180;}}else if (avl ==avr){// none}horizontal.write(servoh);}delay(dtime);}
Suku cadang dan penutup khusus

Skema