Tentang proyek ini
Pendahuluan
Saya telah mencoba membuat robot humanoid baru-baru ini- yang berarti berurusan dengan motor Servo. Semuanya bekerja dengan baik sebelum saya mencoba membuat robot TALK. Ketika saya perlu menggunakan perpustakaan TMRpcm. Tapi ada beberapa perpustakaan seperti
#TMRpcm.h#VirtualWire.h
adalah library yang menggunakan Timer1 dari Arduino. Tampaknya Anda tidak dapat menggunakan dua perangkat secara bersamaan di mana keduanya menggunakan timer yang sama...Jadi, jika robot saya berbicara- servos tidak berfungsi. Karena Servo.h dan TMRpcm keduanya bekerja pada Arduino TImer1. Yang berantakan. Jika Anda ingin keduanya berfungsi, Anda harus menggunakan perpustakaan lain untuk servos. Yang mana perpustakaan ServoTimer2? Ini menggunakan Timer2 di Arduino ... Sayangnya di internet saya belum menemukan tutorial untuk memahami bagaimana perpustakaan ServoTimer2 ini benar-benar bekerja, dan bagaimana menggunakannya dalam kode. Jadi, saya memutuskan untuk membuat tutorial agar orang seperti saya bisa lebih mengerti. Kami akan menggunakan satu motor servo dengan perpustakaan ini dan membuat kode sapuan Servo sederhana
Anda dapat menonton video untuk memahami lebih baik.
Langkah 1:Suku Cadang &Perakitan: 



Bagian utama adalah motor Servo.
Saya menggunakan servo mikro sg90, model apa pun boleh.
Kemudian ambil servo arm seperti pada gambar 2 dan rekatkan pada karton keras (ini hanya untuk mendapatkan visibilitas derajat yang baik) lalu tambahkan arm ke motor servo seperti pada gambar 4.
Langkah 2:Unduh dan Tambahkan Perpustakaan ServoTimer2 ke Arduino 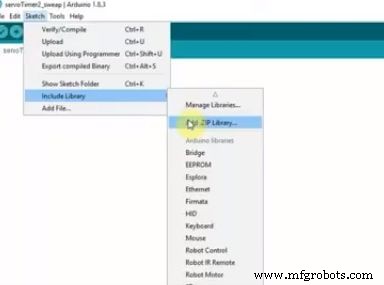
Pertama-tama, Anda harus mengunduh perpustakaan dari sini https://github.com/nabontra/ServoTimer2 dan menempelkannya ke folder perpustakaan Arduino.
Lalu pergi ke sketch>include library>add zip.file dari folder library.
Sekarang Anda siap berangkat.
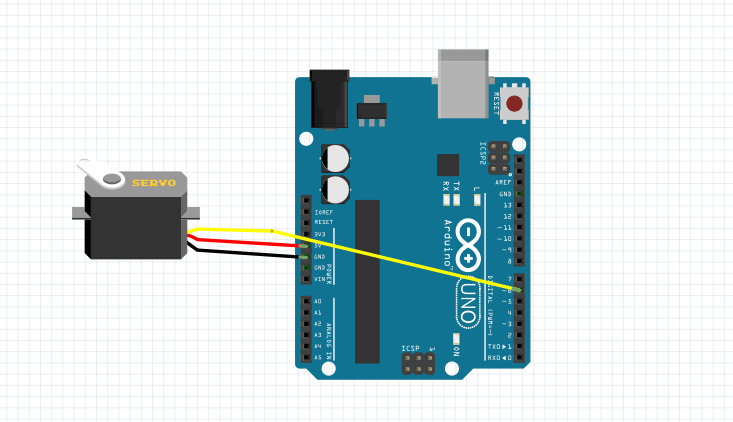
Langkah 3:Bangun Sirkuit Sederhana 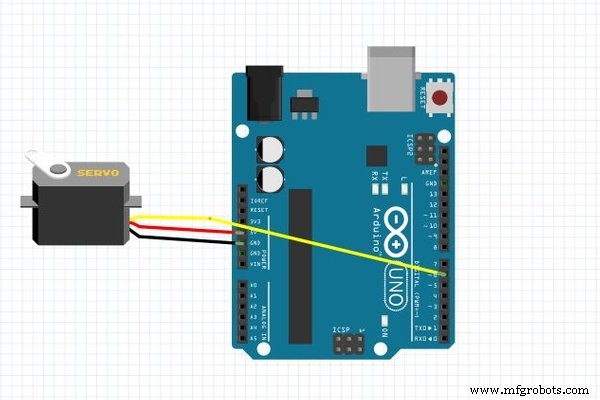

Ini adalah bagian yang paling mudah
- Kabel merah servo ke Arduino vcc (5v)
Langkah 4:Kode.
Sebelum kita mengenal kode ServoTimer2 mari kita lihat kembali sapuan perpustakaan Servo.h.
(motor akan berputar dari 0 derajat sampai 90 derajat - tunggu 1 detik- lalu ke 180 derajat-tunggu 1 detik)
#includeServo servo1;pengaturan batal() {servo1.attach(6); // letakkan kode setup Anda di sini, untuk menjalankan sekali}void loop() { // letakkan kode utama Anda di sini, untuk dijalankan berulang kali:servo1.write(0);delay(1000);servo1.write(90);delay( 1000);servo1.write(180);delay(1000);}
Seperti yang Anda lihat di perpustakaan ini jika kami ingin memutar Servo ke posisi tertentu, kami hanya perlu menulis derajat dan servo akan berfungsi dengan baik. Tetapi di perpustakaan ServoTimer2 kita harus menulis Pulsewidth dari servo dan servo bergerak ke posisi itu menggunakan itu. Paling umum 1500 berarti 90 derajat. Pulsewidth maksimum adalah 2250 dan minimum adalah 750. Yang berarti 750 adalah untuk 0 derajat dan 2250 untuk 180 derajat. Tapi izinkan saya memberi tahu Anda, ini bervariasi dari servo ke servo. Cukup kirimkan nilai Anda dan lihat apa yang terjadi. Jangan khawatir ini tidak akan merusak atau membahayakan motor servo Anda sedikit pun.
Sekarang saya akan membuat kode yang sama untuk ServoTimer 2 dan dengan demikian Anda akan mendapatkan perbedaan sebenarnya.
#include"ServoTimer2.h"ServoTimer2 servo1;pengaturan batal() {servo1.attach(6); }void loop() { // letakkan kode utama Anda di sini, untuk dijalankan berulang kali:servo1.write(750); //lebar pulsa min untuk 0 derajatdelay(1000);servo1.write(1500); //lebar pulsa untuk 90 derajatdelay(1000);servo1.write(2250); //lebar pulsa maks untuk sekitar 180 derajatdelay(1000);}
Sekarang nyalakan arduino dan lihat dengan skala derajat berapa nilai putaran servo. Dan dengan melakukan ini, Anda dapat membuat proyek Anda berjalan. Selamat Making.o 2700 untuk menyelesaikannya.
Langkah 5:Terakhir Nyalakan Arduino dan Eksperimen 

Sekarang nyalakan arduino dan lihat dengan skala derajat berapa nilai putaran servo. Dan membeli melakukan ini Anda dapat membuat proyek Anda berjalan. Selamat Berkreasi.
Kode
- Servo rembes.code
- ServoTimer2.sweep.code
Servo seep.codeC/C++
#includeServo servo1;void setup() {servo1.attach(6); // letakkan kode setup Anda di sini, untuk menjalankan sekali}void loop() { // letakkan kode utama Anda di sini, untuk dijalankan berulang kali:servo1.write(0);delay(1000);servo1.write(90);delay( 1000);servo1.write(180);delay(1000);}
ServoTimer2.sweep.codeC/C++
#include"ServoTimer2.h"ServoTimer2 servo1;pengaturan batal() {servo1.attach(6); }void loop() { // letakkan kode utama Anda di sini, untuk dijalankan berulang kali:servo1.write(750); //lebar pulsa min untuk 0 derajatdelay(1000);servo1.write(1500); //lebar pulsa untuk 90 derajatdelay(1000);servo1.write(2250); //lebar pulsa maks untuk sekitar 180 derajatdelay(1000);} Skema
ServoTimer2.sweep.code
https://github.com/ashraf-minhaj/Arduino-ServoTimer2-basic-sweep-/tree/code-sweep