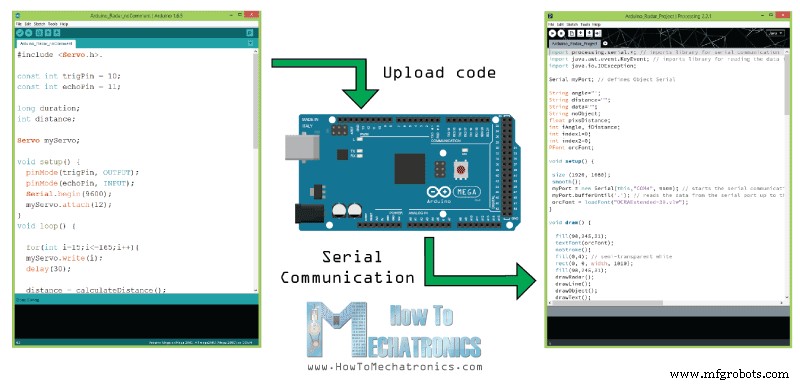
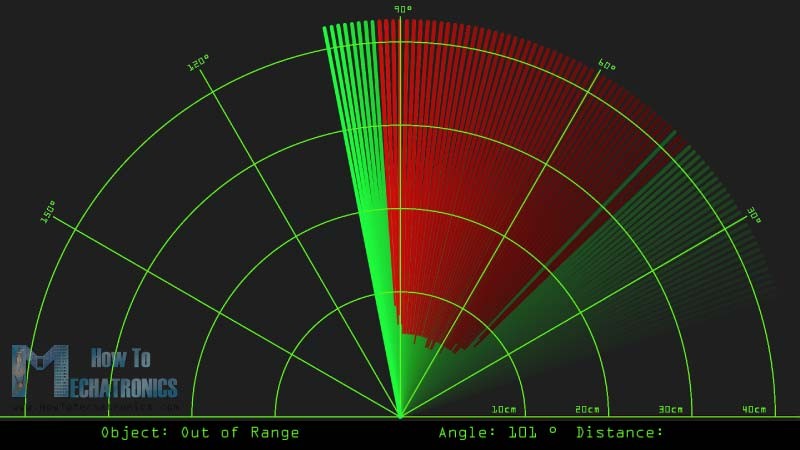
Dalam Tutorial Arduino ini, saya akan menunjukkan kepada Anda bagaimana Anda dapat membuat radar yang tampak keren ini menggunakan Papan Arduino dan Lingkungan Pengembangan Pemrosesan. Anda dapat menonton video berikut atau membaca tutorial tertulis di bawah ini untuk lebih jelasnya.
Ringkasan
Yang Anda butuhkan untuk Proyek Arduino ini adalah Sensor Ultrasonik untuk mendeteksi objek, Motor Servo penghobi kecil untuk memutar sensor dan Papan Arduino untuk mengendalikannya. Anda dapat menonton video berikut atau membaca tutorial tertulis di bawah ini.[/column]
Komponen yang diperlukan untuk Proyek Arduino ini
Anda bisa mendapatkan komponen ini dari salah satu situs di bawah:
Sensor Ultrasonik HC-SR04 …………
Motor Servo………………………………..
Dewan Arduino ……………………………
Breadboard dan Kabel Lompat ………
Membuat perangkat
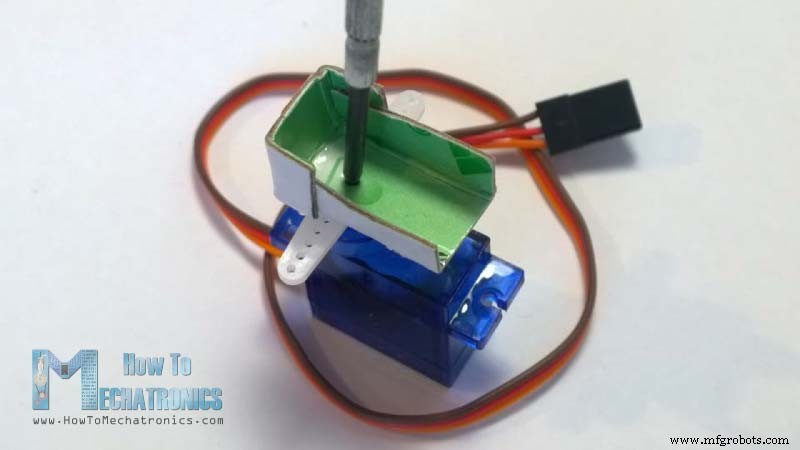
Pertama saya membuat dudukan karton untuk menghubungkan sensor Ultrasonik ke motor Servo. Saya melipatnya seperti yang ditunjukkan pada gambar di bawah, merekatkannya dan mengamankannya ke motor servo menggunakan sekrup seperti ini.
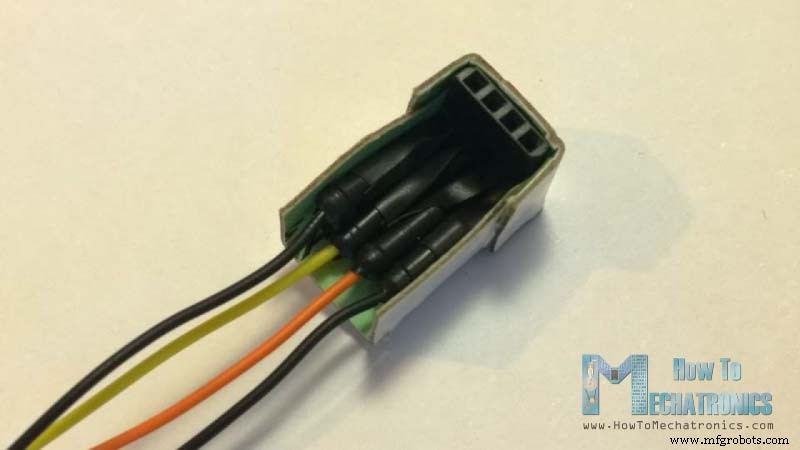
Saya juga memasang pin header tempat saya menyolder 4 kabel jumper untuk menghubungkan sensor.
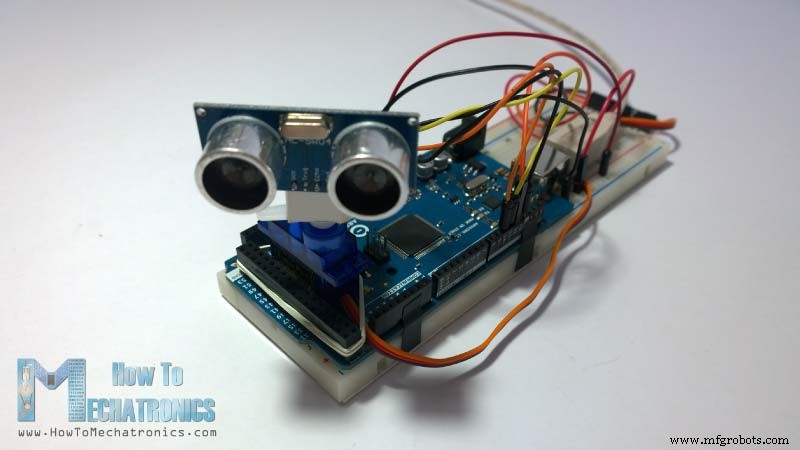
Akhirnya saya mengamankan motor servo ke Arduino Board menggunakan karet gelang.
Ada juga beberapa braket pemasangan khusus untuk sensor ultrasonik dari Banggod. Anda bisa mendapatkannya dari tautan berikut:
Sensor Ultrasonik dengan Braket Pemasangan ………
Bracket Pemasangan Untuk Jangkauan Ultrasonik …….. Banggood
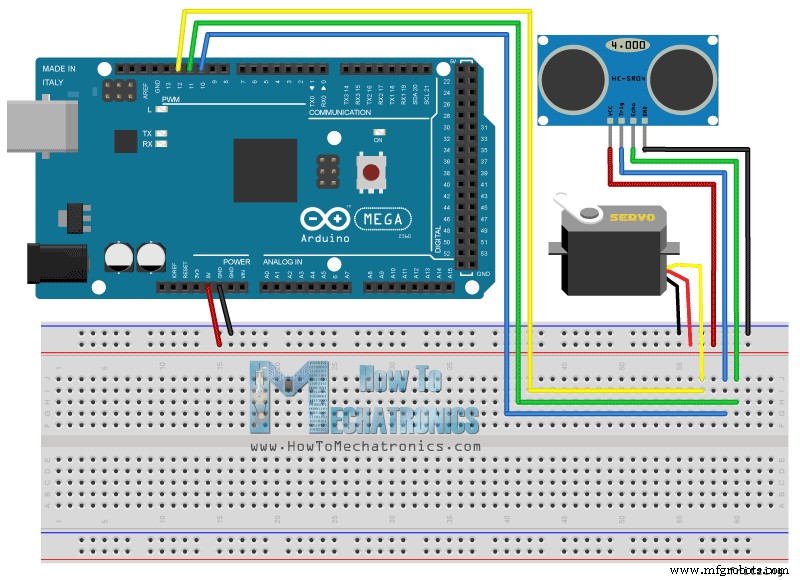
Skema Sirkuit Radar Arduino
Saya menghubungkan Sensor Ultrasonic HC-SR04 ke pin nomor 10 dan 11 dan motor servo ke pin nomor 12 di Arduino Board.
Kode sumber
Sekarang kita perlu membuat kode dan mengunggahnya ke Arduino Board yang akan memungkinkan interaksi antara Arduino dan Processing IDE. Untuk memahami cara kerja koneksi, klik di sini untuk mengunjungi Arduino dan Tutorial Pemrosesan.
Ini Source Code Arduino dengan deskripsi setiap baris kode:
// Includes the Servo library
#include <Servo.h>.
// Defines Tirg and Echo pins of the Ultrasonic Sensor
const int trigPin = 10;
const int echoPin = 11;
// Variables for the duration and the distance
long duration;
int distance;
Servo myServo; // Creates a servo object for controlling the servo motor
void setup() {
pinMode(trigPin, OUTPUT); // Sets the trigPin as an Output
pinMode(echoPin, INPUT); // Sets the echoPin as an Input
Serial.begin(9600);
myServo.attach(12); // Defines on which pin is the servo motor attached
}
void loop() {
// rotates the servo motor from 15 to 165 degrees
for(int i=15;i<=165;i++){
myServo.write(i);
delay(30);
distance = calculateDistance();// Calls a function for calculating the distance measured by the Ultrasonic sensor for each degree
Serial.print(i); // Sends the current degree into the Serial Port
Serial.print(","); // Sends addition character right next to the previous value needed later in the Processing IDE for indexing
Serial.print(distance); // Sends the distance value into the Serial Port
Serial.print("."); // Sends addition character right next to the previous value needed later in the Processing IDE for indexing
}
// Repeats the previous lines from 165 to 15 degrees
for(int i=165;i>15;i--){
myServo.write(i);
delay(30);
distance = calculateDistance();
Serial.print(i);
Serial.print(",");
Serial.print(distance);
Serial.print(".");
}
}
// Function for calculating the distance measured by the Ultrasonic sensor
int calculateDistance(){
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
// Sets the trigPin on HIGH state for 10 micro seconds
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
duration = pulseIn(echoPin, HIGH); // Reads the echoPin, returns the sound wave travel time in microseconds
distance= duration*0.034/2;
return distance;
}
Code language: Arduino (arduino)
Sekarang kita akan menerima nilai sudut dan jarak yang diukur oleh sensor dari Arduino Board ke Processing IDE menggunakan SerialEvent() fungsi yang membaca data dari Serial Port dan kita akan memasukkan nilai sudut dan jarak ke dalam variabel iAngle dan iDistance. Variabel ini akan digunakan untuk menggambar radar, garis, objek yang terdeteksi, dan beberapa teks.
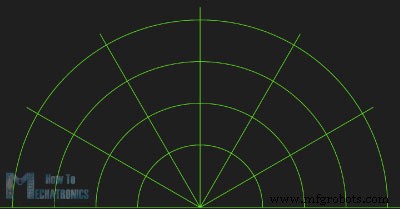
Untuk menggambar radar saya membuat fungsi ini drawRadar() yang terdiri dari arc() dan line() fungsi.
void drawRadar() {
pushMatrix();
translate(960,1000); // moves the starting coordinats to new location
noFill();
strokeWeight(2);
stroke(98,245,31);
// draws the arc lines
arc(0,0,1800,1800,PI,TWO_PI);
arc(0,0,1400,1400,PI,TWO_PI);
arc(0,0,1000,1000,PI,TWO_PI);
arc(0,0,600,600,PI,TWO_PI);
// draws the angle lines
line(-960,0,960,0);
line(0,0,-960*cos(radians(30)),-960*sin(radians(30)));
line(0,0,-960*cos(radians(60)),-960*sin(radians(60)));
line(0,0,-960*cos(radians(90)),-960*sin(radians(90)));
line(0,0,-960*cos(radians(120)),-960*sin(radians(120)));
line(0,0,-960*cos(radians(150)),-960*sin(radians(150)));
line(-960*cos(radians(30)),0,960,0);
popMatrix();
}Code language: Arduino (arduino)
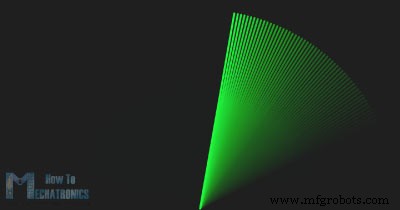
Untuk menggambar garis yang bergerak di sepanjang radar saya membuat fungsi ini drawLine() . Pusat rotasinya diatur dengan fungsi translate() dan menggunakan fungsi line() di mana variabel iAngle digunakan, garis digambar ulang untuk setiap derajat.
void drawLine() {
pushMatrix();
strokeWeight(9);
stroke(30,250,60);
translate(960,1000); // moves the starting coordinats to new location
line(0,0,950*cos(radians(iAngle)),-950*sin(radians(iAngle))); // draws the line according to the angle
popMatrix();
}Code language: Arduino (arduino)
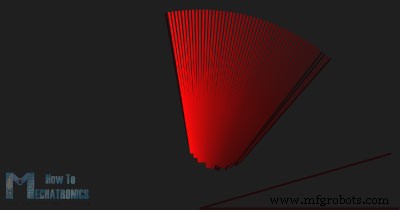
Untuk menggambar objek yang terdeteksi, saya membuat drawObject() . ini fungsi. Ini mendapatkan jarak dari sensor ultrasonik, mengubahnya menjadi piksel dan dalam kombinasi dengan sudut sensor menarik objek di radar.
void drawObject() {
pushMatrix();
translate(960,1000); // moves the starting coordinats to new location
strokeWeight(9);
stroke(255,10,10); // red color
pixsDistance = iDistance*22.5; // covers the distance from the sensor from cm to pixels
// limiting the range to 40 cms
if(iDistance<40){
// draws the object according to the angle and the distance
line(pixsDistance*cos(radians(iAngle)),-pixsDistance*sin(radians(iAngle)),950*cos(radians(iAngle)),-950*sin(radians(iAngle)));
}
popMatrix();
}Code language: Arduino (arduino)
Untuk teks di layar saya membuat drawText() fungsi yang menggambar teks di lokasi tertentu.
Semua fungsi ini dipanggil di draw() main utama fungsi yang berulang sepanjang waktu dan menggambar layar. Juga di sini saya menggunakan ini fill() fungsi dengan 2 parameter untuk mensimulasikan kekaburan gerakan dan pemudaran lambat dari garis yang bergerak.
void draw() {
fill(98,245,31);
textFont(orcFont);
// simulating motion blur and slow fade of the moving line
noStroke();
fill(0,4);
rect(0, 0, width, 1010);
fill(98,245,31); // green color
// calls the functions for drawing the radar
drawRadar();
drawLine();
drawObject();
drawText();
}Code language: Arduino (arduino)
import processing.serial.*; // imports library for serial communication
import java.awt.event.KeyEvent; // imports library for reading the data from the serial port
import java.io.IOException;
Serial myPort; // defines Object Serial
// defubes variables
String angle="";
String distance="";
String data="";
String noObject;
float pixsDistance;
int iAngle, iDistance;
int index1=0;
int index2=0;
PFont orcFont;
void setup() {
size (1920, 1080);
smooth();
myPort = new Serial(this,"COM4", 9600); // starts the serial communication
myPort.bufferUntil('.'); // reads the data from the serial port up to the character '.'. So actually it reads this: angle,distance.
orcFont = loadFont("OCRAExtended-30.vlw");
}
void draw() {
fill(98,245,31);
textFont(orcFont);
// simulating motion blur and slow fade of the moving line
noStroke();
fill(0,4);
rect(0, 0, width, 1010);
fill(98,245,31); // green color
// calls the functions for drawing the radar
drawRadar();
drawLine();
drawObject();
drawText();
}
void serialEvent (Serial myPort) { // starts reading data from the Serial Port
// reads the data from the Serial Port up to the character '.' and puts it into the String variable "data".
data = myPort.readStringUntil('.');
data = data.substring(0,data.length()-1);
index1 = data.indexOf(","); // find the character ',' and puts it into the variable "index1"
angle= data.substring(0, index1); // read the data from position "0" to position of the variable index1 or thats the value of the angle the Arduino Board sent into the Serial Port
distance= data.substring(index1+1, data.length()); // read the data from position "index1" to the end of the data pr thats the value of the distance
// converts the String variables into Integer
iAngle = int(angle);
iDistance = int(distance);
}
void drawRadar() {
pushMatrix();
translate(960,1000); // moves the starting coordinats to new location
noFill();
strokeWeight(2);
stroke(98,245,31);
// draws the arc lines
arc(0,0,1800,1800,PI,TWO_PI);
arc(0,0,1400,1400,PI,TWO_PI);
arc(0,0,1000,1000,PI,TWO_PI);
arc(0,0,600,600,PI,TWO_PI);
// draws the angle lines
line(-960,0,960,0);
line(0,0,-960*cos(radians(30)),-960*sin(radians(30)));
line(0,0,-960*cos(radians(60)),-960*sin(radians(60)));
line(0,0,-960*cos(radians(90)),-960*sin(radians(90)));
line(0,0,-960*cos(radians(120)),-960*sin(radians(120)));
line(0,0,-960*cos(radians(150)),-960*sin(radians(150)));
line(-960*cos(radians(30)),0,960,0);
popMatrix();
}
void drawObject() {
pushMatrix();
translate(960,1000); // moves the starting coordinats to new location
strokeWeight(9);
stroke(255,10,10); // red color
pixsDistance = iDistance*22.5; // covers the distance from the sensor from cm to pixels
// limiting the range to 40 cms
if(iDistance<40){
// draws the object according to the angle and the distance
line(pixsDistance*cos(radians(iAngle)),-pixsDistance*sin(radians(iAngle)),950*cos(radians(iAngle)),-950*sin(radians(iAngle)));
}
popMatrix();
}
void drawLine() {
pushMatrix();
strokeWeight(9);
stroke(30,250,60);
translate(960,1000); // moves the starting coordinats to new location
line(0,0,950*cos(radians(iAngle)),-950*sin(radians(iAngle))); // draws the line according to the angle
popMatrix();
}
void drawText() { // draws the texts on the screen
pushMatrix();
if(iDistance>40) {
noObject = "Out of Range";
}
else {
noObject = "In Range";
}
fill(0,0,0);
noStroke();
rect(0, 1010, width, 1080);
fill(98,245,31);
textSize(25);
text("10cm",1180,990);
text("20cm",1380,990);
text("30cm",1580,990);
text("40cm",1780,990);
textSize(40);
text("Object: " + noObject, 240, 1050);
text("Angle: " + iAngle +" °", 1050, 1050);
text("Distance: ", 1380, 1050);
if(iDistance<40) {
text(" " + iDistance +" cm", 1400, 1050);
}
textSize(25);
fill(98,245,60);
translate(961+960*cos(radians(30)),982-960*sin(radians(30)));
rotate(-radians(-60));
text("30°",0,0);
resetMatrix();
translate(954+960*cos(radians(60)),984-960*sin(radians(60)));
rotate(-radians(-30));
text("60°",0,0);
resetMatrix();
translate(945+960*cos(radians(90)),990-960*sin(radians(90)));
rotate(radians(0));
text("90°",0,0);
resetMatrix();
translate(935+960*cos(radians(120)),1003-960*sin(radians(120)));
rotate(radians(-30));
text("120°",0,0);
resetMatrix();
translate(940+960*cos(radians(150)),1018-960*sin(radians(150)));
rotate(radians(-60));
text("150°",0,0);
popMatrix();
}
Code language: Arduino (arduino)
Versi baru kode Arduino Radar yang diperbarui agar sesuai dengan resolusi layar apa pun:
Cukup ubah nilai dalam fungsi size(), dengan resolusi layar Anda.
/* Arduino Radar Project
*
* Updated version. Fits any screen resolution!
* Just change the values in the size() function,
* with your screen resolution.
*
* by Dejan Nedelkovski,
* www.HowToMechatronics.com
*
*/
import processing.serial.*; // imports library for serial communication
import java.awt.event.KeyEvent; // imports library for reading the data from the serial port
import java.io.IOException;
Serial myPort; // defines Object Serial
// defubes variables
String angle="";
String distance="";
String data="";
String noObject;
float pixsDistance;
int iAngle, iDistance;
int index1=0;
int index2=0;
PFont orcFont;
void setup() {
size (1920, 1080); // ***CHANGE THIS TO YOUR SCREEN RESOLUTION***
smooth();
myPort = new Serial(this,"COM4", 9600); // starts the serial communication
myPort.bufferUntil('.'); // reads the data from the serial port up to the character '.'. So actually it reads this: angle,distance.
orcFont = loadFont("OCRAExtended-30.vlw");
}
void draw() {
fill(98,245,31);
textFont(orcFont);
// simulating motion blur and slow fade of the moving line
noStroke();
fill(0,4);
rect(0, 0, width, height-height*0.065);
fill(98,245,31); // green color
// calls the functions for drawing the radar
drawRadar();
drawLine();
drawObject();
drawText();
}
void serialEvent (Serial myPort) { // starts reading data from the Serial Port
// reads the data from the Serial Port up to the character '.' and puts it into the String variable "data".
data = myPort.readStringUntil('.');
data = data.substring(0,data.length()-1);
index1 = data.indexOf(","); // find the character ',' and puts it into the variable "index1"
angle= data.substring(0, index1); // read the data from position "0" to position of the variable index1 or thats the value of the angle the Arduino Board sent into the Serial Port
distance= data.substring(index1+1, data.length()); // read the data from position "index1" to the end of the data pr thats the value of the distance
// converts the String variables into Integer
iAngle = int(angle);
iDistance = int(distance);
}
void drawRadar() {
pushMatrix();
translate(width/2,height-height*0.074); // moves the starting coordinats to new location
noFill();
strokeWeight(2);
stroke(98,245,31);
// draws the arc lines
arc(0,0,(width-width*0.0625),(width-width*0.0625),PI,TWO_PI);
arc(0,0,(width-width*0.27),(width-width*0.27),PI,TWO_PI);
arc(0,0,(width-width*0.479),(width-width*0.479),PI,TWO_PI);
arc(0,0,(width-width*0.687),(width-width*0.687),PI,TWO_PI);
// draws the angle lines
line(-width/2,0,width/2,0);
line(0,0,(-width/2)*cos(radians(30)),(-width/2)*sin(radians(30)));
line(0,0,(-width/2)*cos(radians(60)),(-width/2)*sin(radians(60)));
line(0,0,(-width/2)*cos(radians(90)),(-width/2)*sin(radians(90)));
line(0,0,(-width/2)*cos(radians(120)),(-width/2)*sin(radians(120)));
line(0,0,(-width/2)*cos(radians(150)),(-width/2)*sin(radians(150)));
line((-width/2)*cos(radians(30)),0,width/2,0);
popMatrix();
}
void drawObject() {
pushMatrix();
translate(width/2,height-height*0.074); // moves the starting coordinats to new location
strokeWeight(9);
stroke(255,10,10); // red color
pixsDistance = iDistance*((height-height*0.1666)*0.025); // covers the distance from the sensor from cm to pixels
// limiting the range to 40 cms
if(iDistance<40){
// draws the object according to the angle and the distance
line(pixsDistance*cos(radians(iAngle)),-pixsDistance*sin(radians(iAngle)),(width-width*0.505)*cos(radians(iAngle)),-(width-width*0.505)*sin(radians(iAngle)));
}
popMatrix();
}
void drawLine() {
pushMatrix();
strokeWeight(9);
stroke(30,250,60);
translate(width/2,height-height*0.074); // moves the starting coordinats to new location
line(0,0,(height-height*0.12)*cos(radians(iAngle)),-(height-height*0.12)*sin(radians(iAngle))); // draws the line according to the angle
popMatrix();
}
void drawText() { // draws the texts on the screen
pushMatrix();
if(iDistance>40) {
noObject = "Out of Range";
}
else {
noObject = "In Range";
}
fill(0,0,0);
noStroke();
rect(0, height-height*0.0648, width, height);
fill(98,245,31);
textSize(25);
text("10cm",width-width*0.3854,height-height*0.0833);
text("20cm",width-width*0.281,height-height*0.0833);
text("30cm",width-width*0.177,height-height*0.0833);
text("40cm",width-width*0.0729,height-height*0.0833);
textSize(40);
text("Object: " + noObject, width-width*0.875, height-height*0.0277);
text("Angle: " + iAngle +" °", width-width*0.48, height-height*0.0277);
text("Distance: ", width-width*0.26, height-height*0.0277);
if(iDistance<40) {
text(" " + iDistance +" cm", width-width*0.225, height-height*0.0277);
}
textSize(25);
fill(98,245,60);
translate((width-width*0.4994)+width/2*cos(radians(30)),(height-height*0.0907)-width/2*sin(radians(30)));
rotate(-radians(-60));
text("30°",0,0);
resetMatrix();
translate((width-width*0.503)+width/2*cos(radians(60)),(height-height*0.0888)-width/2*sin(radians(60)));
rotate(-radians(-30));
text("60°",0,0);
resetMatrix();
translate((width-width*0.507)+width/2*cos(radians(90)),(height-height*0.0833)-width/2*sin(radians(90)));
rotate(radians(0));
text("90°",0,0);
resetMatrix();
translate(width-width*0.513+width/2*cos(radians(120)),(height-height*0.07129)-width/2*sin(radians(120)));
rotate(radians(-30));
text("120°",0,0);
resetMatrix();
translate((width-width*0.5104)+width/2*cos(radians(150)),(height-height*0.0574)-width/2*sin(radians(150)));
rotate(radians(-60));
text("150°",0,0);
popMatrix();
}Code language: Arduino (arduino)