Perangkat Efek Hall Digital (ON/OFF):Sakelar dan Kait
Pelajari tentang polaritas medan-B, sakelar unipolar, sakelar omnipolar, kait efek Hall, dan sakelar bipolar dalam artikel teknis ini.
Sakelar dan kait efek hall adalah pembanding medan magnet. Mereka membandingkan kerapatan fluks magnet, kadang-kadang disebut sebagai medan-B, dengan beberapa ambang batas yang telah ditentukan sebelumnya dan mengeluarkan hasil perbandingan sebagai nilai digital 1-bit. Ada empat kategori berbeda dari sensor Hall digital (on/off):sakelar unipolar, sakelar bipolar, sakelar omnipolar, dan kait.
Kami akan memeriksa fungsi transfer dari setiap jenis secara rinci. Tapi, sebelum itu, saya ingin mengklarifikasi konsep penting yang akan umum digunakan dalam diskusi kita:polaritas kerapatan fluks magnet.
Bagaimana Mendefinisikan Polaritas bidang B?
Perangkat efek Hall bersifat terarah. Ia hanya merasakan komponen kerapatan fluks magnet yang berada di sepanjang sumbu sensitivitasnya. Gambar 1 menunjukkan sumbu sensitivitas dari dua paket perangkat Hall yang umum.
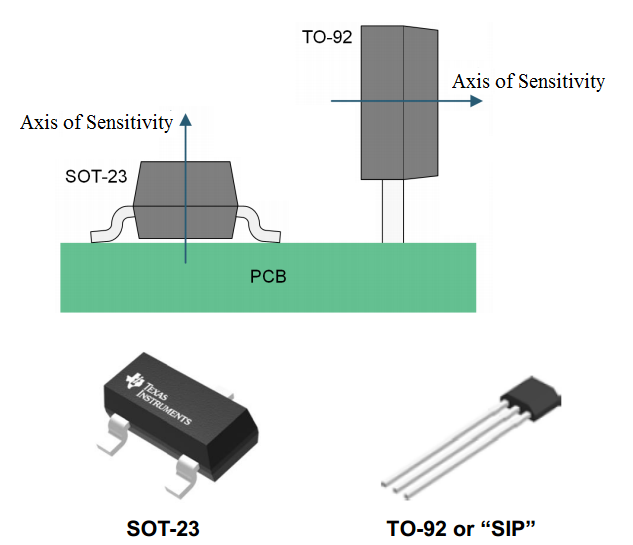
Gambar 1. Gambar milik Texas Instruments.
Jika medan magnet yang diterapkan ke perangkat menghasilkan komponen dalam arah sumbu sensitivitas, medan B diasumsikan positif. Jika medan menghasilkan komponen dalam arah yang berlawanan dari sumbu sensitivitas, diasumsikan negatif. Gambar 2 menunjukkan contoh di mana kerapatan fluks magnet memiliki polaritas negatif di lokasi sensor (A).
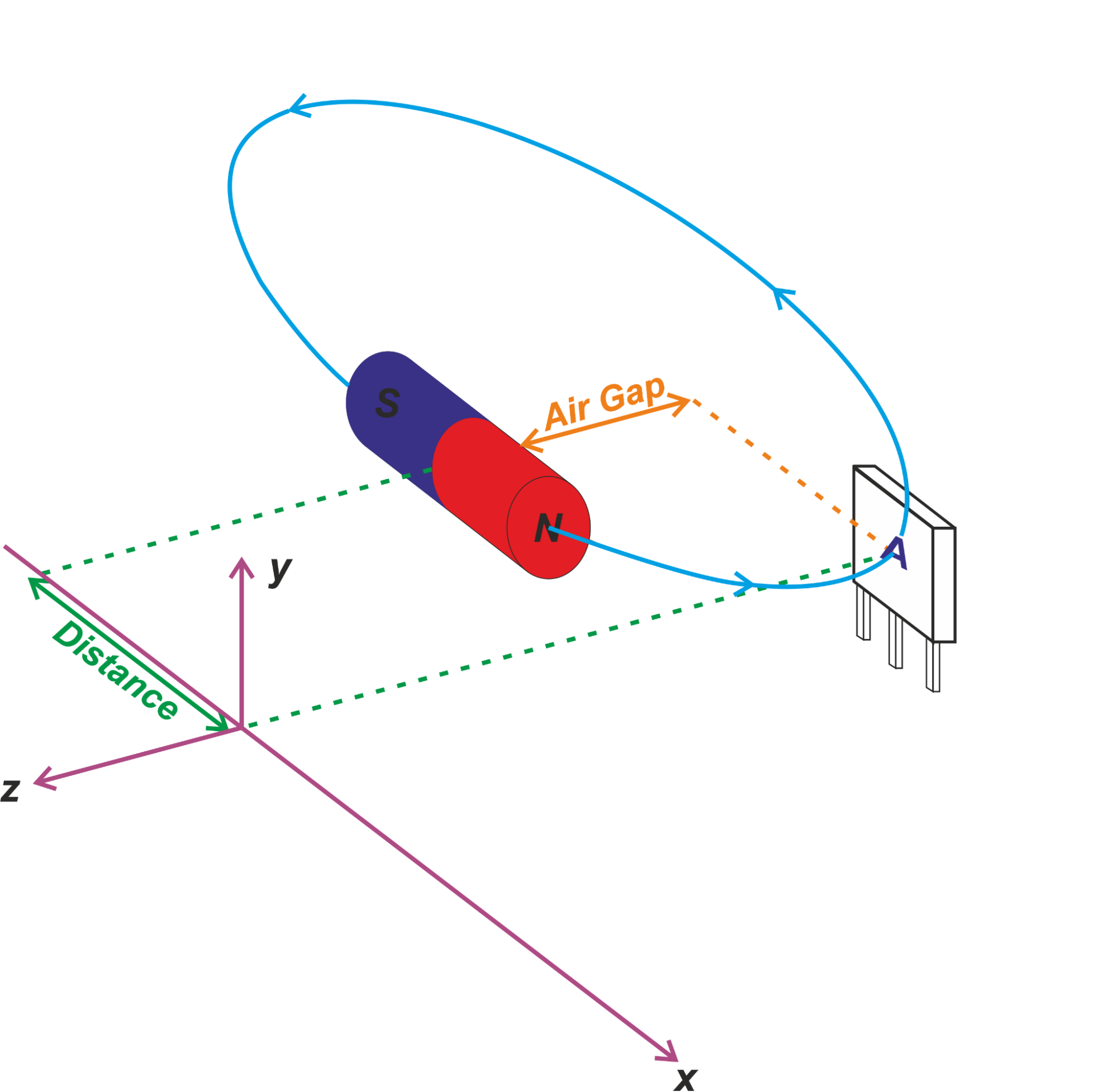
Gambar 2
Dalam contoh di atas, kami berasumsi bahwa sumbu sensitivitas perangkat berada dalam arah sumbu z. Karena garis medan magnet magnet bergerak dari kutub utara ke kutub selatan, medan B yang dirasakan oleh perangkat adalah negatif.
Ada juga konvensi mengenai polaritas medan-B yang umum digunakan oleh produsen sensor Hall. Mereka menganggap medan magnet yang dihasilkan oleh kutub selatan magnet sebagai positif dan kutub utara sebagai negatif. Hal ini didasarkan pada asumsi bahwa wajah sensor yang bermerek mengarah ke magnet. Wajah bermerek adalah permukaan depan sensor tempat Anda dapat menemukan nomor bagian perangkat, dll. Dengan mempertimbangkan sumbu sensitivitas yang ditunjukkan pada Gambar 1, Anda dapat memverifikasi bahwa menghadirkan kutub selatan magnet ke wajah bermerek sensor akan membuat medan magnet dalam arah sumbu sensitivitas (medan positif). Demikian pula, kutub utara akan menciptakan medan magnet negatif. Jika kutub magnet ditempelkan di bagian belakang paket sensor (bukan bagian depan kemasan yang bermerek), konvensi di atas tidak berlaku lagi!
Catatan terakhir untuk menyelesaikan diskusi ini:Banyak perangkat Hall berdimensi satu dan merasakan medan B hanya di sepanjang satu sumbu sensitivitas (seperti yang ditunjukkan pada Gambar 1). Namun, ada IC sensor yang lebih canggih yang menggunakan lebih dari satu elemen Hall untuk mendukung tiga sumbu sensitivitas (sensor tiga dimensi). Sekarang, mari kita periksa fungsi transfer dari berbagai jenis perangkat Hall digital (on/off).
Sakelar Unipolar
Fungsionalitas sakelar unipolar diilustrasikan pada Gambar 3.
Gambar 3
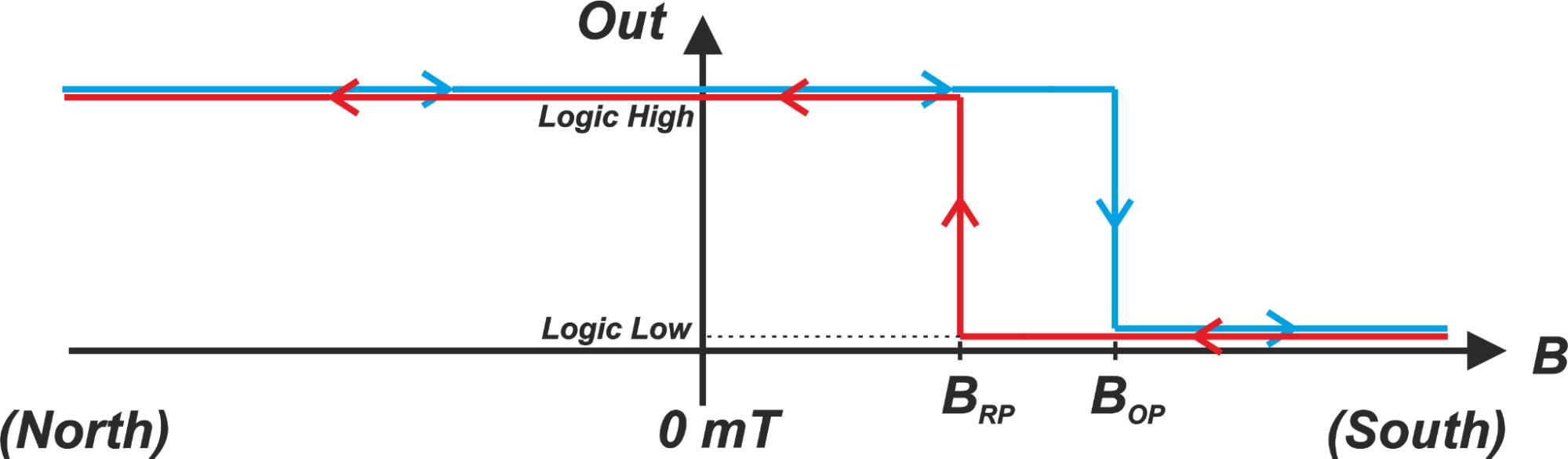
Perangkat ini disebut sakelar unipolar karena ambang batas peralihannya (BRP dan BOP ) berada di daerah positif sumbu medan-B. Status keluaran hanya dapat berubah sebagai respons terhadap medan polaritas selatan. Medan kutub utara, atau negatif, tidak berpengaruh pada sensor; menjelaskan nama “saklar unipolar”.
Mari kita lihat bagaimana perangkat merespons perubahan medan magnet. Asumsikan bahwa medan kutub utara diterapkan ke sensor dan kami secara bertahap meningkatkan medan yang diterapkan (membuatnya lebih positif). Untuk B OP , perangkat mati dan output berlogika tinggi. Karena medan magnet yang diterapkan menjadi lebih besar (atau lebih positif) dari nilai ambang BOP , perangkat menyala dan output beralih ke keadaan sebaliknya (logika rendah). Fungsi transfer untuk medan-B yang meningkat ditunjukkan oleh kurva biru pada gambar.
Bagaimana perangkat yang diaktifkan merespons bidang yang menurun? Untuk medan magnet yang menurun, perangkat tetap hidup (logika rendah) hingga medan magnet yang diterapkan menjadi kurang dari BRP . Hal ini ditunjukkan oleh kurva merah pada gambar di atas. Untuk B RP , perangkat mati dan output menjadi logika tinggi.
Oleh karena itu, ambang pensaklaran untuk medan magnet yang meningkat berbeda dari ambang pensaklaran untuk medan yang menurun. Histeresis ini sengaja dirancang untuk memiliki switching yang bersih pada output. Getaran mekanis dalam sistem penginderaan efek Hall serta kebisingan listrik dan elektromagnetik dapat menimbulkan kebisingan ke dalam medan magnet yang dirasakan. Kebisingan medan-B di sekitar tingkat ambang batas dapat menyebabkan fluktuasi yang tidak menentu dan berubah dengan cepat pada output sensor Hall (Gambar 4). Fluktuasi yang tidak diinginkan ini dihilangkan dengan membuat ambang batas bidang naik dan turun sedikit berbeda.
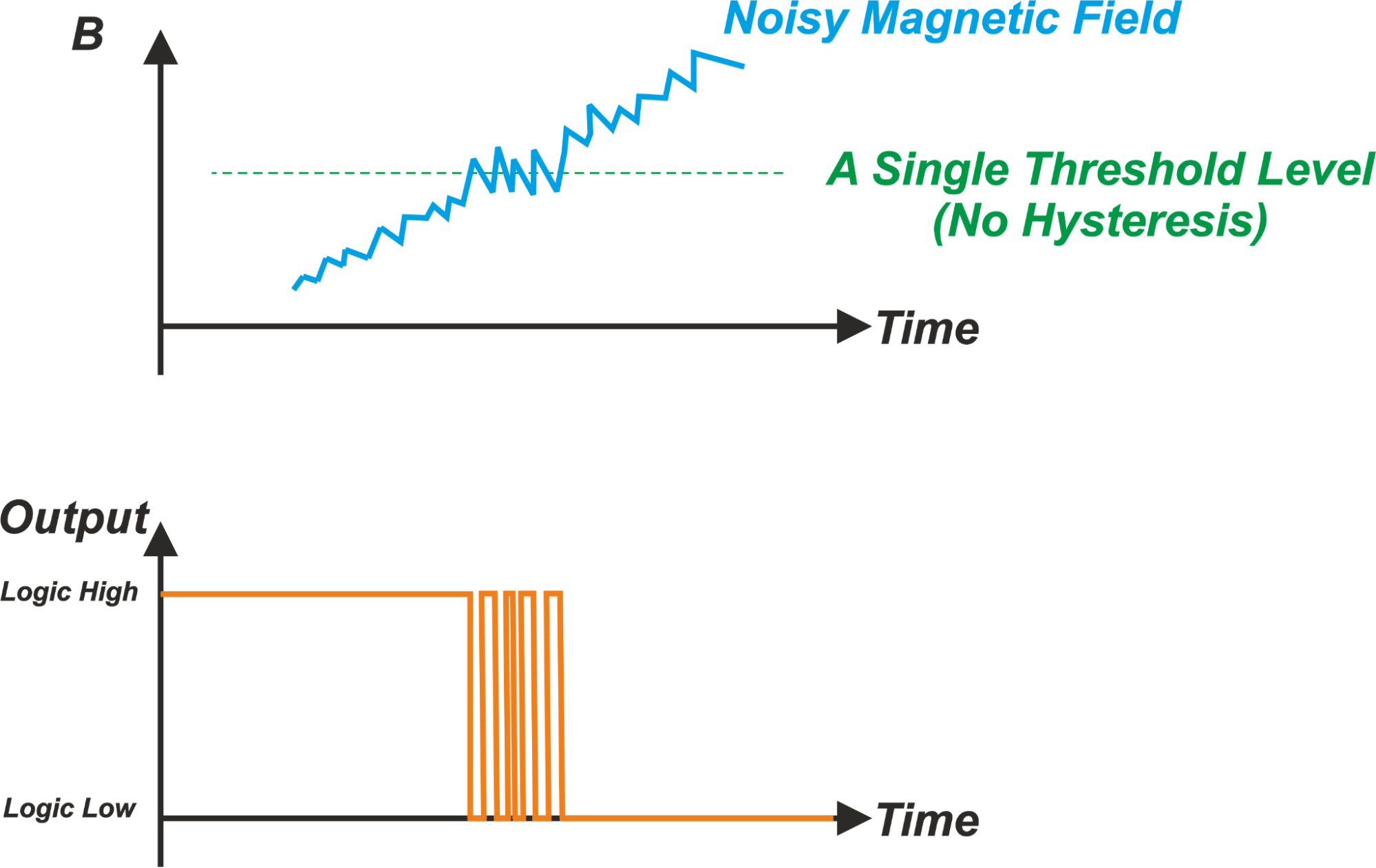
Gambar 4. Tanpa histeresis, output dapat menjadi tak tentu di sekitar ambang batas.
Seperti yang kita lihat di atas, pengoperasian sakelar unipolar dapat dijelaskan dengan dua parameter berbeda:BOP dan BRP . BOP singkatan dari "titik operasi magnetik" atau hanya "titik operasi". Ini menunjukkan tingkat ambang batas untuk medan magnet yang meningkat di atas tempat sensor menyala. BRP adalah "titik pelepasan magnetik" atau hanya "titik pelepasan". Ini menunjukkan tingkat ambang batas untuk medan magnet yang menurun. Untuk B RP , perangkat mati. Histeresis diwakili oleh BHYS yang diberikan oleh:
BHYS =BOP BRP
Kami akan membahas di bawah bahwa notasi serupa dapat digunakan untuk menggambarkan pengoperasian jenis perangkat Hall digital lainnya.
Perhatikan bahwa bergantung pada desain elektronik sensor, status aktif dan nonaktif keluaran sensor mungkin berlawanan dengan yang digambarkan pada Gambar 3 (logika rendah saat perangkat mati dan logika tinggi saat perangkat menyala).
Saklar Omnipolar
Fungsi alih switch omnipolar ditunjukkan pada Gambar 5.
Gambar 5
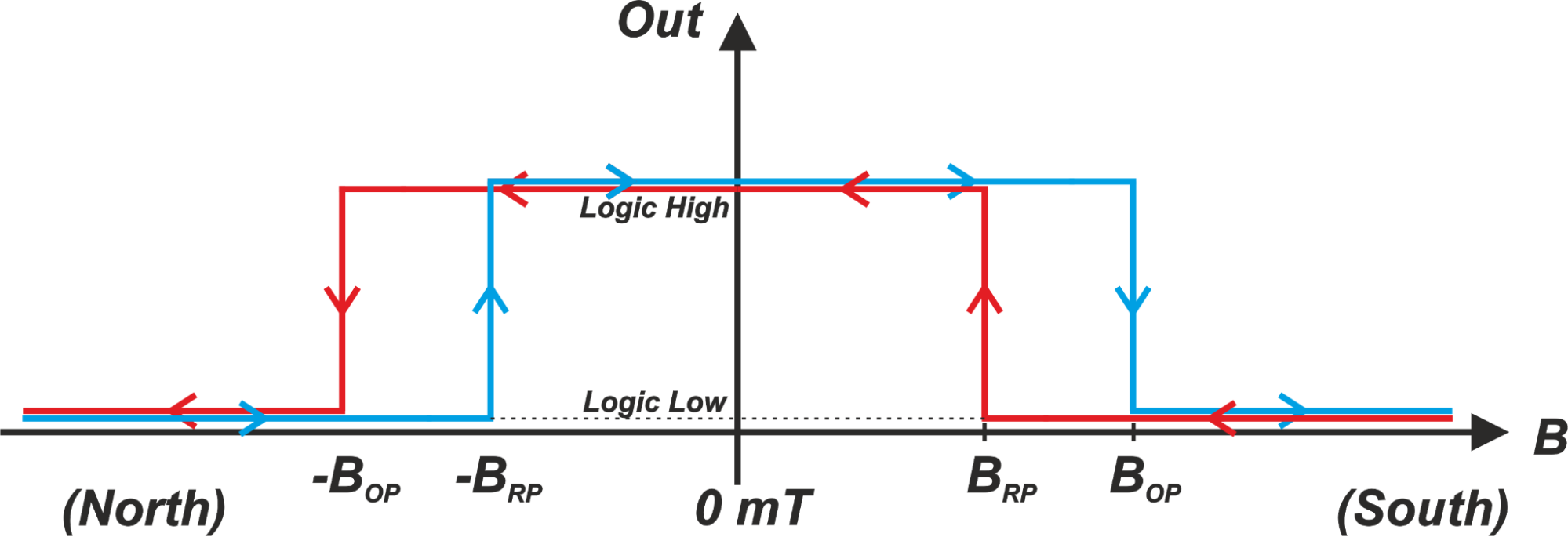
Sakelar omnipolar menyala dengan medan positif yang kuat atau medan negatif yang kuat. Seperti yang ditunjukkan pada gambar, ketika besarnya medan magnet menjadi lebih besar dari BOP (|B|> BOP ), perangkat menyala dan output menjadi logika rendah. Ketika besarnya bidang B menjadi kurang dari BRP (|B| RP ), sensor mati dan output masuk ke logika tinggi. Kurva biru menunjukkan keluaran sensor ketika medan-B berubah dari nilai negatif yang besar ke nilai positif yang besar. Kurva merah menunjukkan output untuk medan B yang menurun. Dengan sakelar omnipolar, besarnya titik operasi adalah sama untuk medan B positif dan negatif. Demikian pula, besarnya titik pelepasan adalah sama untuk medan kutub selatan dan utara.
Kait Efek Hall
Fungsi transfer kait efek Hall ditunjukkan pada Gambar 6.
Gambar 6
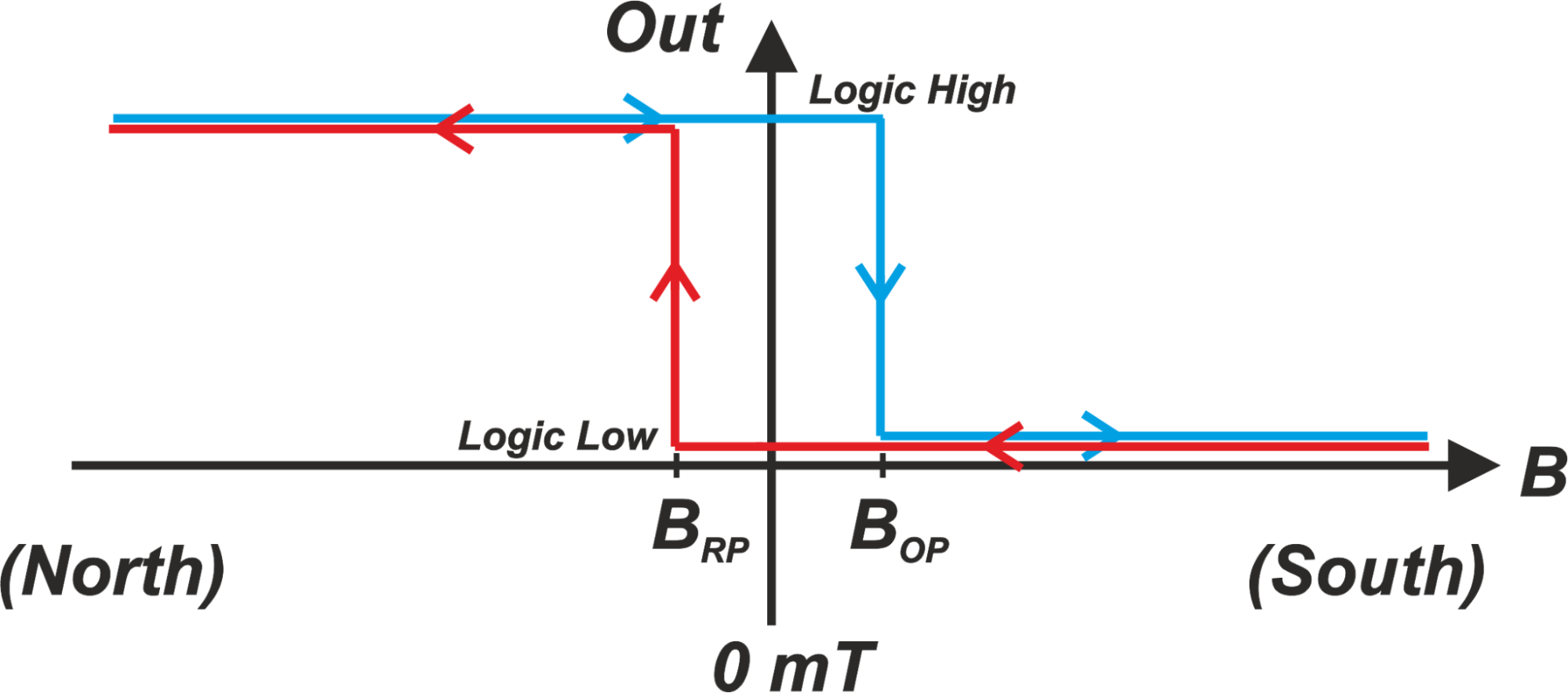
Perangkat kait memiliki BOP positive positif dan BRP negative negatif . Dinyalakan oleh medan positif yang cukup besar (B> BOP ) dan mati jika ada medan kutub utara yang cukup kuat (B RP ). Histeresis perangkat mencakup wilayah sekitar B=0 dan berkisar dari BRP hingga BOP . Kita tahu bahwa perangkat tidak mengubah keadaan di wilayah histeresis. Asumsikan bahwa kita menerapkan medan positif yang cukup kuat untuk mengaktifkan sensor. Jika kita menghilangkan medan ini, perangkat akan merasakan medan magnet B=0. Meskipun tidak ada bidang yang diterapkan ke sensor, itu akan mempertahankan status sebelumnya dan tetap menyala. Itu hanya akan berubah keadaan jika kita menerapkan medan kuat dengan polaritas yang berlawanan. Saat medan magnet lemah diterapkan ke sensor (BRP OP ), sensor mempertahankan output yang dihasilkan sebelumnya. Ini menjelaskan mengapa perangkat Hall ini disebut kait.
Sementara sakelar unipolar atau omnipolar dapat mengubah keadaan saat amplitudo medan yang diterapkan berubah, kait dapat merasakan polaritas medan-B (asalkan medan yang diterapkan memiliki kekuatan yang cukup). Kait biasanya digunakan dengan magnet cincin dalam aplikasi putar misalnya untuk mendeteksi posisi poros yang berputar. Hal ini ditunjukkan pada Gambar 7.
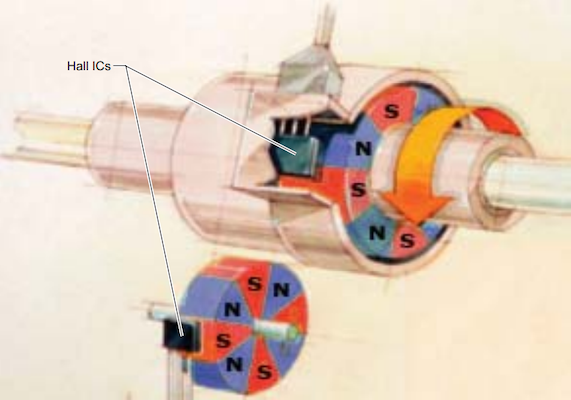
Gambar 7. Gambar milik Allegro.
Saat poros berputar, polaritas medan magnet yang dirasakan berubah dan sensor menyala/mati sesuai dengan itu. Dengan perangkat kait, titik operasi dan titik pelepasan sama besarnya tetapi memiliki polaritas yang berlawanan (BOP -BRP ).
Sakelar Bipolar
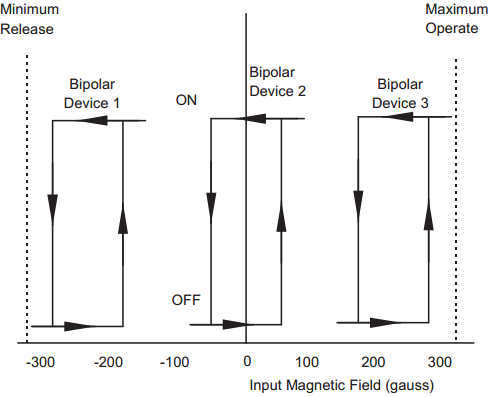
Dengan sakelar bipolar, kita hanya mengetahui nilai titik operasi "maksimum" dan titik pelepasan "minimum". Namun, nilai ambang batas yang tepat tidak diketahui. Akibatnya, pengoperasian perangkat yang tepat dapat berubah berdasarkan unit ke unit. Gambar 8 menunjukkan contoh di mana BOP maximum maksimum sekitar 300 gauss dan minimum BRP sekitar -300 gauss.
Gambar 8. Gambar milik Honeywell.
Untuk “Perangkat 1”, keduanya BOP dan BRP negatif. Untuk "Perangkat 3", kedua ambang batas positif. Sampel lain, "Perangkat 2", memiliki respons yang mirip dengan kait. Ini memiliki BOP positive positif dan BRP negative negatif . Meskipun fungsi alih “Perangkat 2” menyerupai gerendel, perlu diperhatikan bahwa titik operasi dan titik pelepasan sakelar bipolar mungkin tidak sama besarnya (BOP - BRP ).
Seperti yang Anda lihat, tiga fungsi transfer yang berbeda dimungkinkan bahkan untuk perangkat dengan tipe yang sama yang diproduksi bersama di lot yang sama. Menurut catatan aplikasi "Bipolar Switch Hall-Effect IC Basics'' dari Allegro, hanya sekitar 10% dari sakelar bipolar yang memiliki fungsi transfer yang mirip dengan "Perangkat 1" dan "Perangkat 3". Sisanya memiliki respons tipe kait. Dibandingkan dengan perangkat kait, sakelar bipolar dapat menawarkan zona histeresis yang lebih sempit (BHYS =BOP BRP ) dan akibatnya, sensitivitas yang lebih tinggi. Namun, karena mode operasi sakelar bipolar dapat berubah berdasarkan unit ke unit, kita perlu memastikan bahwa sistem akan berfungsi dengan baik untuk semua nilai BOP yang mungkin. dan BRP (dalam batas kisaran yang ditentukan).
Untuk melihat daftar lengkap artikel saya, silakan kunjungi halaman ini.


