

Teknologi Industri

Manufaktur industri
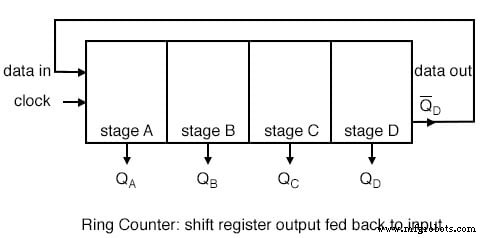
Jika output dari register geser diumpankan kembali ke input. hasil penghitung cincin. Pola data yang terkandung dalam register geser akan disirkulasikan kembali selama pulsa clock diterapkan.
Misalnya, pola data akan berulang setiap empat pulsa clock pada gambar di bawah ini. Namun, kita harus memuat pola data.
Semua 0 's atau semua 1 tidak dihitung. Apakah level logika kontinu dari kondisi seperti itu berguna?
Kami membuat ketentuan untuk memuat data ke register geser paralel-in/serial-out yang dikonfigurasi sebagai penghitung cincin di bawah ini.
Setiap pola acak dapat dimuat. Pola yang paling umum digunakan adalah satu 1 .
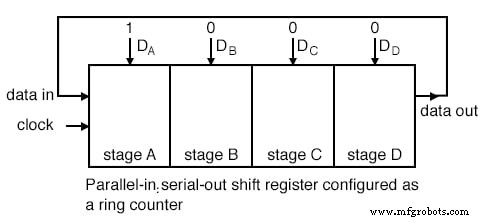
Memuat biner 1000 ke penghitung dering, di atas, sebelum pemindahan menghasilkan pola yang dapat dilihat.
Pola data untuk satu tahap berulang setiap empat pulsa jam dalam contoh 4 tahap kami.
Bentuk gelombang untuk keempat tahap terlihat sama, kecuali untuk waktu tunda satu jam dari satu tahap ke tahap berikutnya. Lihat gambar di bawah.
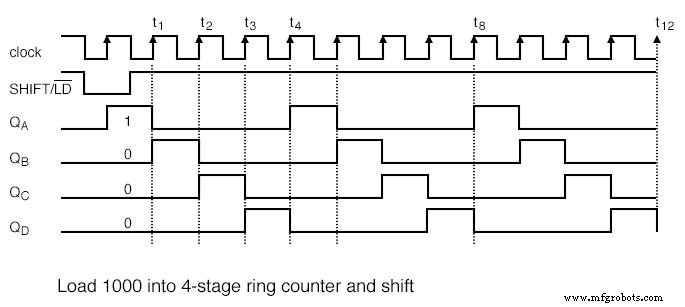
Rangkaian di atas adalah hasil bagi dengan 4 menangkal. Membandingkan input clock dengan salah satu output, menunjukkan rasio frekuensi 4:1.
T:Bagaimana tahapan yang kita perlukan untuk penghitung ring bagi dengan 10?
J:Sepuluh tahapan akan mensirkulasi ulang 1 setiap 10 pulsa jam.
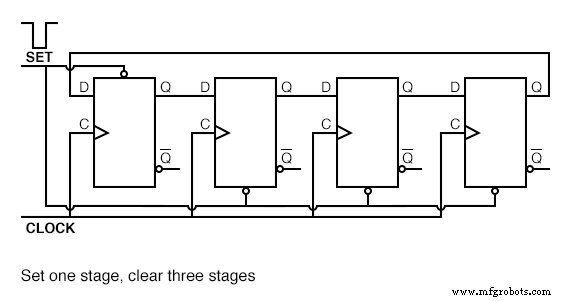
Metode alternatif untuk menginisialisasi penghitung dering ke 1000 ditunjukkan di atas. Bentuk gelombang shift identik dengan yang di atas, mengulangi setiap pulsa clock keempat.
Persyaratan untuk inisialisasi merupakan kelemahan dari ring counter dibandingkan counter konvensional.
Paling tidak, ini harus diinisialisasi pada saat penyalaan karena tidak ada cara untuk memprediksi status flip-flop yang akan dinyalakan.
Secara teori, inisialisasi seharusnya tidak diperlukan lagi. Dalam praktik sebenarnya, flip-flop pada akhirnya dapat dirusak oleh noise, merusak pola data.
Penghitung “koreksi sendiri”, seperti penghitung biner sinkron konvensional akan lebih andal.
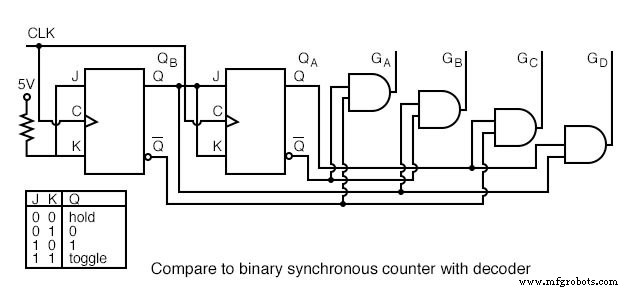
Pencacah sinkron biner di atas hanya membutuhkan dua tahap, tetapi memerlukan gerbang dekoder.
Penghitung dering memiliki lebih banyak tahapan, tetapi decoding sendiri, menyimpan gerbang decode di atas.
Kerugian lain dari penghitung dering adalah tidak "memulai sendiri".
Jika kita membutuhkan keluaran yang didekodekan, penghitung cincin terlihat menarik, khususnya, jika sebagian besar logika berada dalam satu paket register geser. Jika tidak, pencacah biner konvensional tidak akan terlalu rumit tanpa dekoder.
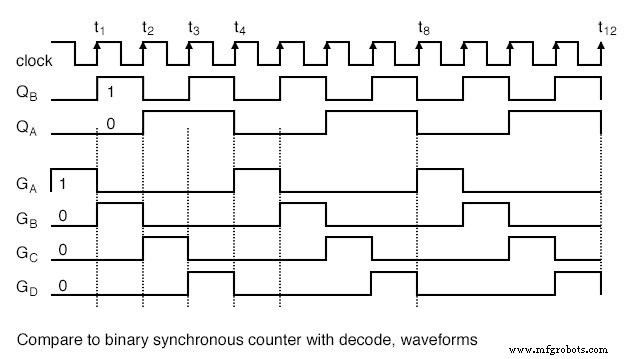
Bentuk gelombang yang didekode dari pencacah biner sinkron identik dengan bentuk gelombang pencacah cincin sebelumnya.
Urutan penghitung adalah (QA TB ) =(00 01 10 11 ).
penghitung cincin sakelar-ekor , juga dikenal sebagai penghitung Johnson , mengatasi beberapa keterbatasan penghitung dering.
Seperti penghitung dering, penghitung Johnson adalah register geser yang diumpankan kembali ke dirinya sendiri. Ini membutuhkan setengah tahap dari penghitung dering yang sebanding untuk rasio pembagian yang diberikan.
Jika keluaran pelengkap dari penghitung dering diumpankan kembali ke masukan alih-alih keluaran sebenarnya, penghitung Johnson akan dihasilkan.
Perbedaan antara penghitung dering dan penghitung Johnson adalah keluaran tahap terakhir mana yang diumpankan kembali (Q atau Q’).
Bandingkan koneksi umpan balik di bawah ini dengan hati-hati dengan penghitung dering sebelumnya.
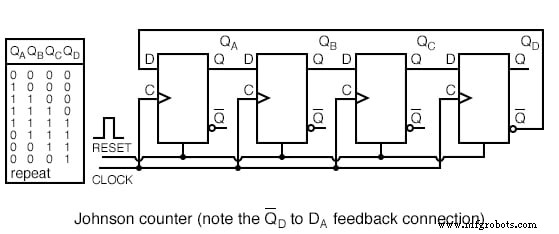
Koneksi umpan balik "terbalik" ini memiliki efek mendalam pada perilaku sirkuit yang serupa.
Sirkulasi ulang satu 1 di sekitar penghitung cincin membagi jam input dengan faktor yang sama dengan jumlah tahapan.
Sedangkan, penghitung Johnson membagi dengan faktor yang sama dengan dua kali jumlah tahapan.
Misalnya, penghitung dering 4 tahap dibagi dengan 4 . Penghitung Johnson 4 tahap dibagi dengan 8 .
Mulai penghitung Johnson dengan menyelesaikan semua tahapan hingga 0 s sebelum jam pertama. Ini sering dilakukan pada waktu penyalaan.
Mengacu pada gambar di bawah, jam pertama bergeser tiga 0 s dari ( TA TB TC ) di sebelah kanan ke ( QB TC TB ). 1 di QD ' (pelengkap dari Q) digeser kembali menjadi QA .
Jadi, kami mulai menggeser 1 s ke kanan, menggantikan 0 S. Di mana penghitung cincin mensirkulasi ulang satu 1 , penghitung Johnson 4 tahap mensirkulasi ulang empat 0 s kemudian empat 1 s untuk pola 8-bit, lalu ulangi.
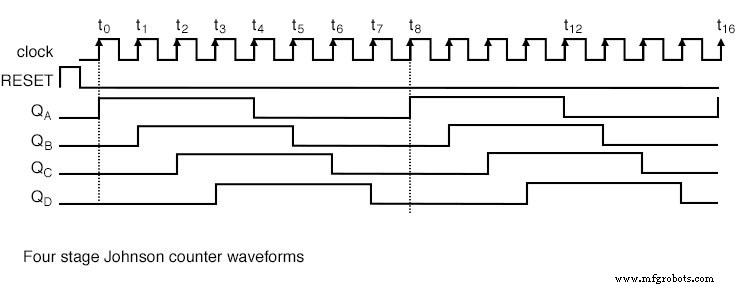
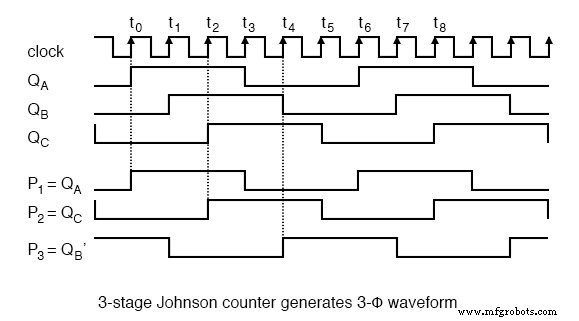
Bentuk gelombang di atas menggambarkan bahwa gelombang persegi multi-fase dihasilkan oleh pencacah Johnson.
Unit 4 tahap di atas menghasilkan empat fase yang tumpang tindih dengan siklus kerja 50%. Berapa tahap yang diperlukan untuk menghasilkan satu set bentuk gelombang tiga fasa?
Misalnya, penghitung Johnson tiga tahap, yang digerakkan oleh jam 360 Hertz akan menghasilkan tiga 120 o gelombang persegi bertahap pada 60 Hertz.
Keluaran dari flop-flop dalam pencacah Johnson mudah didekode menjadi satu keadaan.
Di bawah, misalnya, delapan status penghitung Johnson 4 tahap didekodekan oleh tidak lebih dari dua gerbang input untuk masing-masing status.
Dalam contoh kita, delapan dari dua gerbang input mendekode status untuk contoh penghitung Johnson kita.
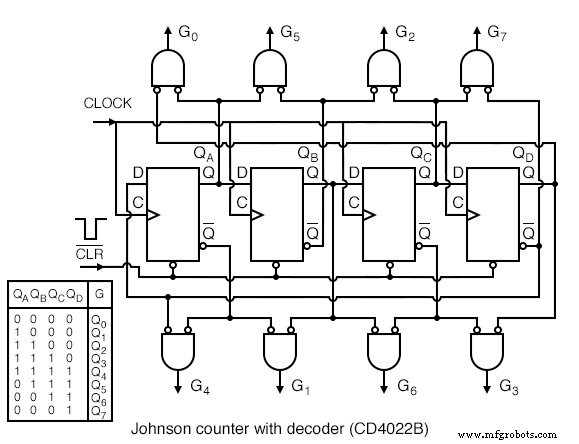
Tidak peduli berapa lama penghitung Johnson, hanya diperlukan gerbang dekoder 2 masukan.
Perhatikan, kita bisa saja menggunakan input yang tidak dibalikkan ke DAN gerbang dengan mengubah input gerbang dari benar menjadi terbalik pada FF, Q untuk T’ , (dan sebaliknya).
Namun, kami mencoba membuat diagram di atas sesuai dengan lembar data untuk CD4022B, sedekat mungkin.
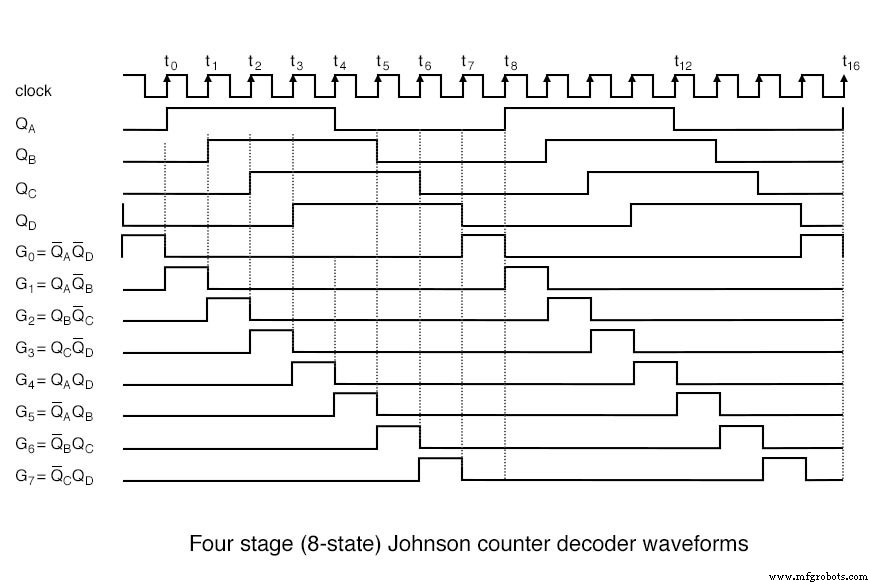
Di atas, empat gelombang persegi bertahap kami QA ke TD didekode menjadi delapan sinyal (G0 ke G7 ) aktif selama satu periode jam dari siklus 8 jam yang lengkap.
Misalnya, G0 aktif tinggi saat keduanya QA dan TD rendah. Dengan demikian, pasangan dari berbagai keluaran register menentukan masing-masing dari delapan status contoh penghitung Johnson kami.
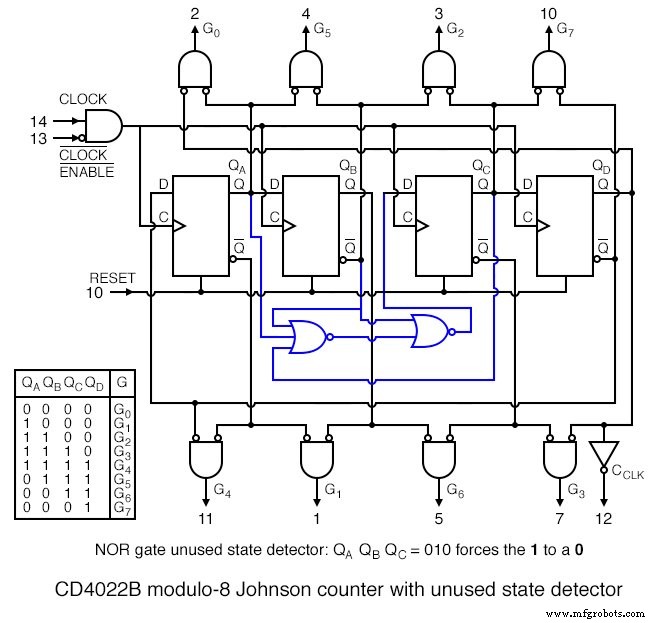
Di atas adalah diagram internal penghitung CD4022B Johnson yang lebih lengkap. Lihat lembar data produsen untuk detail kecil yang dihilangkan.
Tambahan baru utama pada diagram dibandingkan dengan gambar sebelumnya adalah pendeteksi keadaan yang tidak diizinkan terdiri dari dua NOR gerbang.
Lihatlah tabel status inset. Ada 8 negara bagian yang diizinkan seperti yang tercantum dalam tabel.
Karena shifter kami memiliki empat flip-flop, ada total 16 status, di mana ada 8 status yang tidak diizinkan. Itu akan menjadi yang tidak tercantum dalam tabel.
Secara teori, kami tidak akan masuk ke salah satu negara bagian yang tidak diizinkan selama register geser RESET sebelum digunakan pertama kali.
Namun, di "dunia nyata" setelah berhari-hari beroperasi terus-menerus karena kebisingan yang tidak terduga, gangguan saluran listrik, hampir sambaran petir, dll, penghitung Johnson dapat masuk ke salah satu status yang tidak diizinkan.
Untuk aplikasi dengan keandalan tinggi, kita perlu merencanakan kemungkinan tipis ini. Lebih serius adalah kasus di mana sirkuit tidak dibersihkan saat power-up.
Dalam hal ini tidak ada cara untuk mengetahui mana dari 16-status sirkuit yang akan menyala.
Setelah berada dalam status yang tidak diizinkan, penghitung Johnson tidak akan kembali ke negara bagian mana pun yang diizinkan tanpa intervensi. Itulah tujuan dari NOR gerbang.
Periksa tabel untuk urutan (QA TB TC ) =(010 ). Urutan ini tidak muncul di tabel status yang diizinkan.
Oleh karena itu (010 ) tidak diperbolehkan. Seharusnya tidak pernah terjadi. Jika ya, penghitung Johnson berada dalam status tidak diizinkan, yang harus dikeluarkan ke status apa pun yang diizinkan.
Misalkan (QA TB TC ) =(010 ). NOR yang kedua gerbang akan menggantikan QB =1 dengan 0 di D masukan ke FF QC .
Dengan kata lain, pelanggaran 010 diganti dengan 000 . Dan 000 , yang muncul di tabel, akan digeser ke kanan.
Mungkin ada urutan triple-0 dalam tabel. Beginilah cara NOR gerbang mengeluarkan penghitung Johnson dari status yang tidak diizinkan ke status yang diizinkan.
Tidak semua negara bagian yang tidak diizinkan berisi 010 urutan. Namun, setelah beberapa jam, urutan ini akan muncul sehingga semua status yang tidak diizinkan pada akhirnya akan diloloskan.
Jika sirkuit dinyalakan tanpa RESET , outputnya tidak akan dapat diprediksi selama beberapa jam hingga status yang diizinkan tercapai.
Jika ini merupakan masalah untuk aplikasi tertentu, pastikan untuk RESET saat dihidupkan.
Sepasang perangkat penghitung Johnson sirkuit terintegrasi dengan status keluaran yang didekode tersedia.
Kami telah melihat logika internal CD4017 dalam diskusi penghitung Johnson.
Perangkat seri 4000 dapat beroperasi dari catu daya 3V hingga 15V. Bagian 74HC, dirancang untuk kompatibilitas TTL, dapat beroperasi dari suplai 2V hingga 6V, menghitung lebih cepat, dan memiliki kemampuan drive keluaran yang lebih besar.
Untuk lembar data perangkat lengkap, ikuti tautannya.
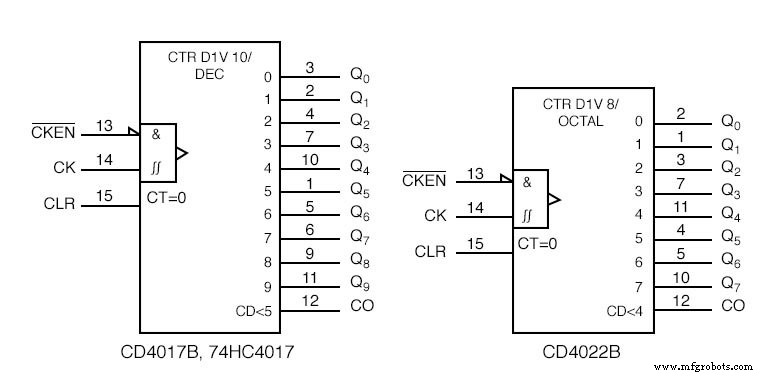
Simbol ANSI untuk modulo -10 (dibagi dengan 10) dan penghitung modulo-8 Johnson ditampilkan di atas.
Simbol mengambil karakteristik penghitung daripada turunan register geser, sebagaimana adanya.
Bentuk gelombang untuk CD4022 modulo-8 dan operasi ditunjukkan sebelumnya. Penghitung dekade CD4017B/ 74HC4017 adalah penghitung Johnson 5 tahap dengan sepuluh keluaran yang didekodekan.
Operasi dan bentuk gelombang mirip dengan CD4017. Faktanya, CD4017 dan CD4022 keduanya dirinci pada lembar data yang sama.
74HC4017 adalah versi penghitung dekade yang lebih modern.
Perangkat ini digunakan di mana output yang didekodekan diperlukan alih-alih output biner atau BCD (Binary Coded Decimal) yang ditemukan pada penghitung normal.
Dengan diterjemahkan, yang kami maksud adalah satu baris dari sepuluh baris aktif pada satu waktu untuk '4017 menggantikan kode BCD empat bit dari penghitung konvensional.
Lihat bentuk gelombang sebelumnya untuk decoding 1-dari-8 untuk penghitung ‘4022 Octal Johnson.
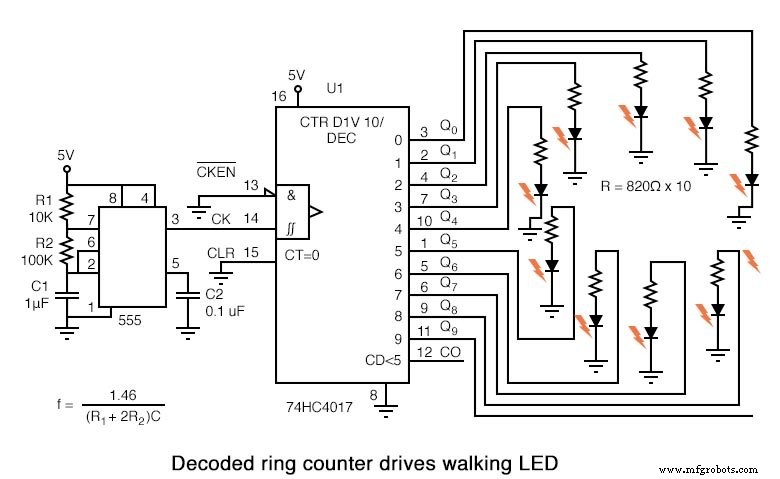
Penghitung Johnson di atas menggeser LED yang menyala setiap seperlima detik di sekitar cincin sepuluh.
Perhatikan bahwa 74HC4017 digunakan sebagai pengganti '40017 karena bagian sebelumnya memiliki kemampuan drive yang lebih baru.
Dari lembar data, (pada tautan di atas) beroperasi di VCC =5V, VOH =4.6V pada 4ma.
Dengan kata lain, output dapat memasok 4 ma pada 4,6 V untuk menggerakkan LED. Ingatlah bahwa LED biasanya digerakkan dengan arus 10 hingga 20 ma.
Padahal, mereka terlihat hingga 1 ma. Sirkuit sederhana ini menggambarkan aplikasi 'HC4017.
Butuh tampilan yang cerah untuk pameran? Kemudian, gunakan buffer pembalik untuk menggerakkan katoda LED yang ditarik ke catu daya dengan resistor anoda bernilai lebih rendah.
Timer 555, berfungsi sebagai multivibrator astabil, menghasilkan frekuensi clock yang ditentukan oleh R1 R2 C1 .
Ini mendorong 74HC4017 selangkah demi selangkah seperti yang ditunjukkan oleh satu LED yang menyala di ring.
Perhatikan, jika 555 tidak menggerakkan pin clock '4015 dengan andal, jalankan melalui satu tahap buffer antara 555 dan '4017.
Sebuah variabel R2 dapat mengubah kecepatan langkah. Nilai kapasitor decoupling C2 tidak kritis. Kapasitor serupa harus diterapkan pada pin daya dan arde ‘4017.
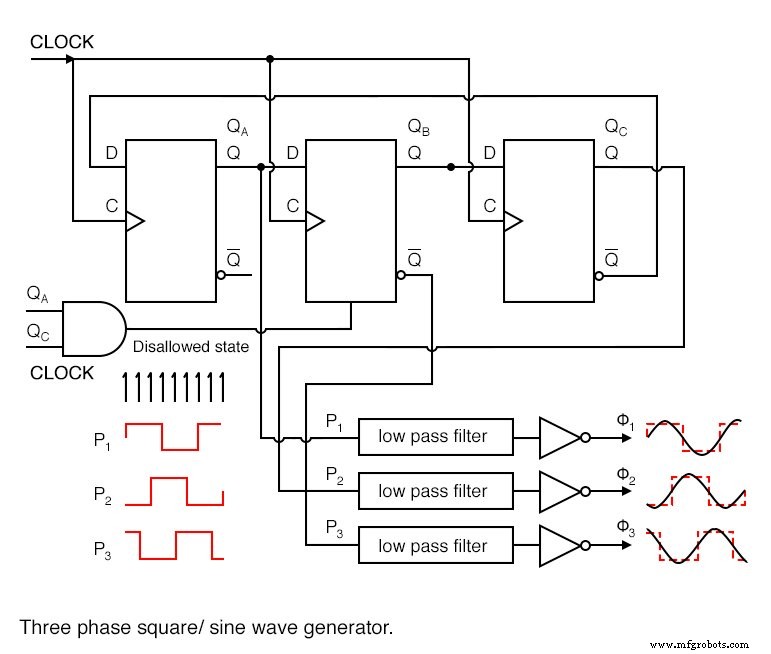
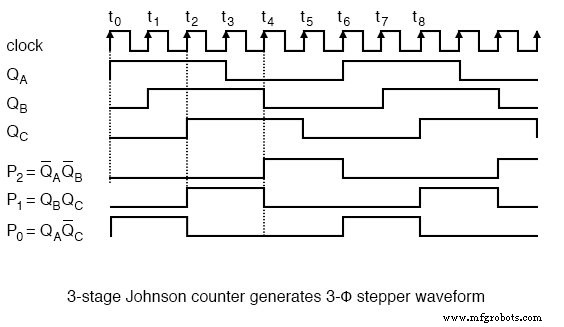
Penghitung Johnson di atas menghasilkan gelombang persegi 3 fase, bertahap 60 o terpisah sehubungan dengan (QA TB TC ).
Namun, kita membutuhkan 120 o bentuk gelombang bertahap dari aplikasi daya (lihat Volume II, AC).
Memilih P1 =QA P2 =QC P3 =QB ' menghasilkan 120 o pentahapan yang diinginkan. Lihat gambar di bawah.
Jika ini (P1 P2 P3 ) difilter low-pass ke gelombang sinus dan diperkuat, ini bisa menjadi awal dari catu daya 3 fase.
Misalnya, apakah Anda perlu menggerakkan motor pesawat kecil 3-fase 400 Hz?
Kemudian, masukkan 6x 400Hz ke sirkuit JAM di atas . Perhatikan bahwa semua bentuk gelombang ini adalah siklus kerja 50%.
Sirkuit di bawah ini menghasilkan bentuk gelombang nonoverlapping 3 fase, siklus kerja kurang dari 50%, untuk menggerakkan motor stepper 3 fase.
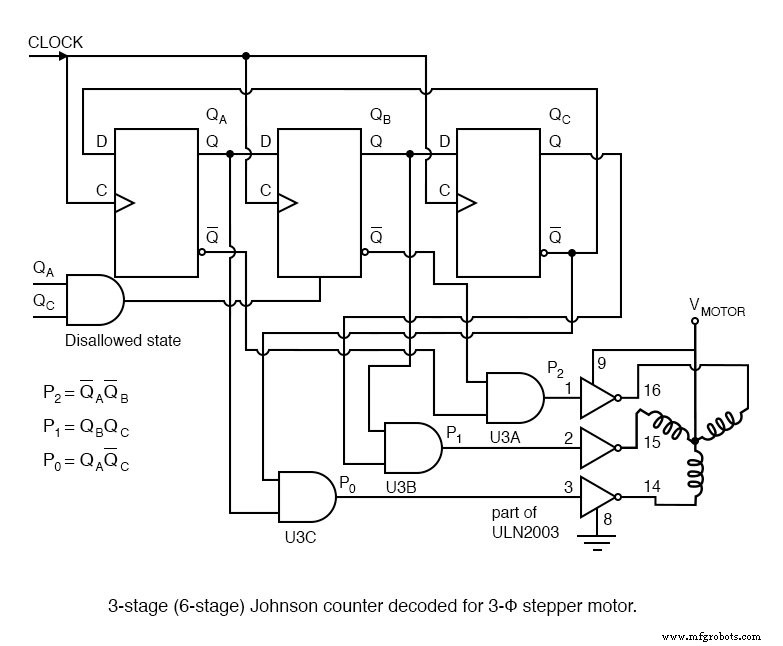
Di atas kami memecahkan kode keluaran yang tumpang tindih QA TB TC ke keluaran yang tidak tumpang tindih P0 P1 P2 seperti yang ditunjukkan di bawah ini.
Bentuk gelombang ini menggerakkan motor stepper 3 fase setelah amplifikasi yang sesuai dari level milliamp ke level amp pecahan menggunakan driver ULN2003 yang ditunjukkan di atas, atau driver pasangan komponen diskrit Darlington yang ditunjukkan dalam rangkaian berikut.
Tidak termasuk driver motor, sirkuit ini membutuhkan tiga paket IC (Integrated Circuit):dua paket FF “D” tipe ganda dan gerbang NAND quad.
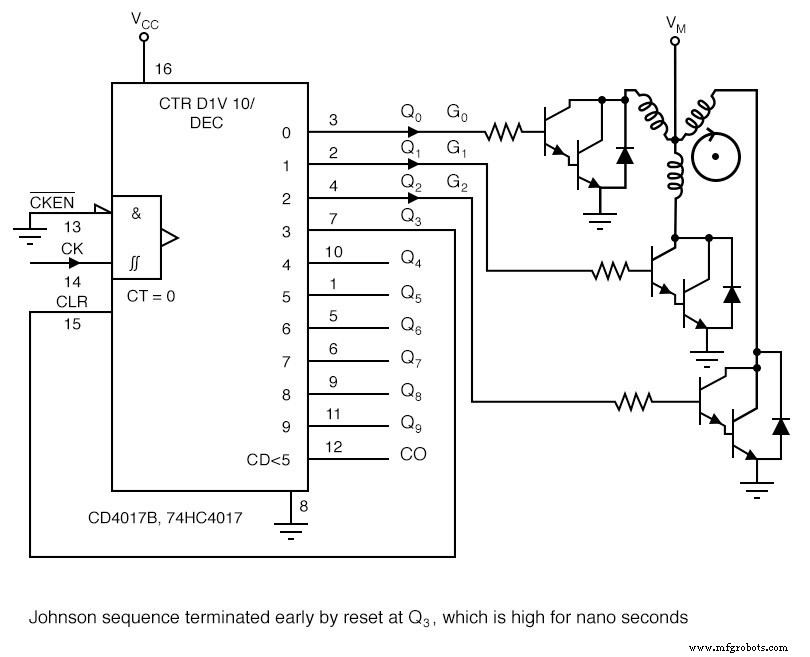
CD4017 tunggal, di atas, menghasilkan bentuk gelombang stepper 3 fase yang diperlukan dalam rangkaian di atas dengan mengosongkan penghitung Johnson pada hitungan 3 .
Hitung 3 bertahan selama kurang dari satu mikrodetik sebelum membersihkan dirinya sendiri. Hitungan lainnya (Q0 =G0 T1 =G1 T2 =G2 ) masing-masing tetap selama satu jam penuh.
Driver transistor bipolar Darlington yang ditunjukkan di atas adalah pengganti sirkuit internal ULN2003.
Desain driver berada di luar cakupan bab elektronik digital ini. Salah satu driver dapat digunakan dengan salah satu rangkaian generator bentuk gelombang.
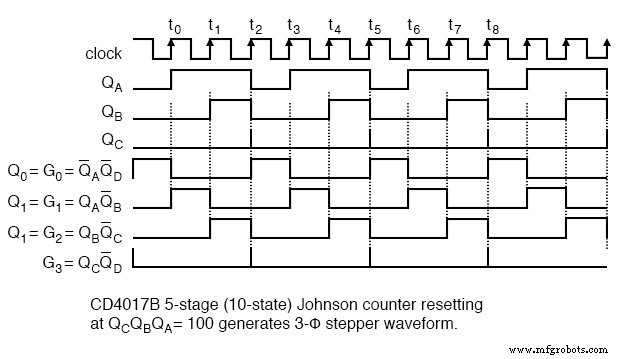
Waceform di atas paling masuk akal dalam konteks logika internal CD4017 yang ditunjukkan sebelumnya di bagian ini.
Padahal, DAN persamaan gating untuk decoder internal ditampilkan. Sinyal QA TB TC apakah keluaran register geser langsung counter Johnson tidak tersedia pada pin-out.
TD bentuk gelombang menunjukkan pengaturan ulang ‘4017 setiap tiga jam. T0 T1 T2 , dll. adalah keluaran yang didekode yang sebenarnya tersedia di pin keluaran.
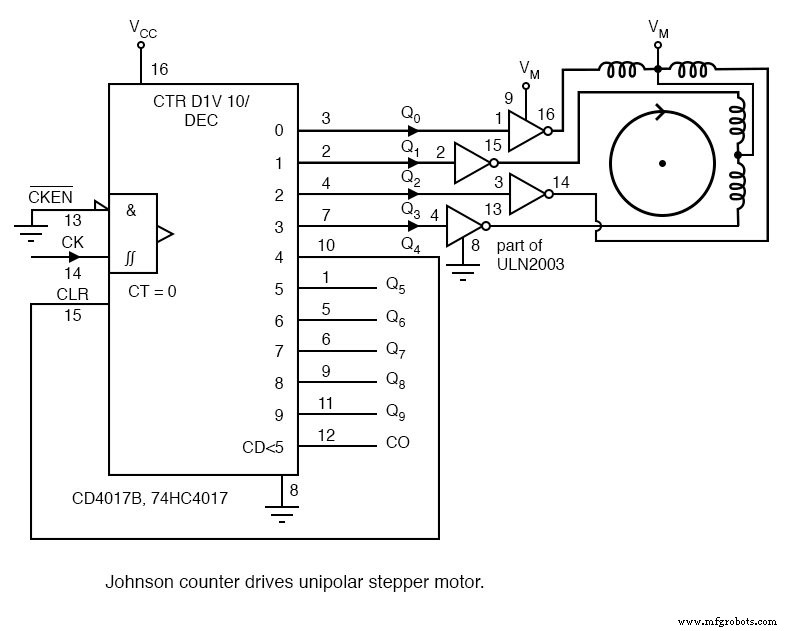
Di atas kami menghasilkan bentuk gelombang untuk menggerakkan motor stepper unipolar , yang hanya membutuhkan satu polaritas sinyal mengemudi.
Artinya, kita tidak harus membalikkan polaritas drive ke belitan. Ini menyederhanakan driver daya antara '4017 dan motor.
Pasangan Darlington dari diagram sebelumnya dapat menggantikan ULN3003.
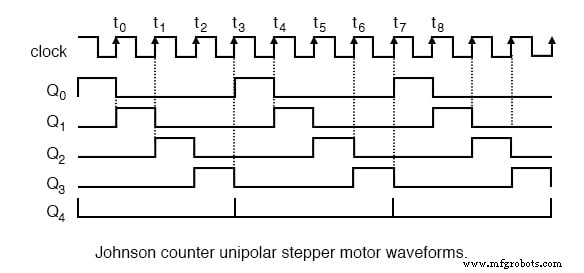
Sekali lagi, CD4017B menghasilkan bentuk gelombang yang diperlukan dengan reset setelah hitungan terminal.
Keluaran yang didekodekan Q0 T1 T2 T3 berturut-turut menggerakkan belitan motor stepper, dengan Q4 mengatur ulang penghitung di akhir setiap kelompok empat pulsa.
LEMBAR KERJA TERKAIT:
Teknologi Industri
Komponen dan persediaan Arduino Nano R3 × 1 Buzzer × 1 LED 5 mm:Merah × 1 LED 5 mm:Hijau × 1 Texas Instruments Shift Register- Serial to Parallel × 1 Tampilan LED 7 Segmen, Merah × 1 Resistor 221 ohm × 10 Baterai 9V (ge
LED Berkedip Diagram Sirkuit Roulette menggunakan Timer 555 &IC 4017 Ada permainan kasino dan kata Prancis yang menyertainya yang disebut Roulette. Sirkuit ini menyerupai fungsi permainan roda Roulette, oleh karena itu nama yang diberikan untuknya. Rangkaian ini terdiri dari IC timer dan IC khusus
Mari kita hadapi itu. Crosstalk PCB adalah masalah besar yang dihadapi rata-rata insinyur dengan PCB berkecepatan tinggi. Saat ini, kami memiliki lebih banyak papan kompak, sehingga lebih penting untuk menganalisis crosstalk sebelum merakit PCB. Namun, jika Anda tidak terbiasa dengan konsep crossta
Silinder hidrolik sangat penting untuk produktivitas Anda, dan ketika salah satu gagal, Anda perlu memperbaikinya dengan cepat dan akurat. Proses perbaikan silinder hidraulik mungkin tampak mudah, tetapi ada beberapa aspek penting yang harus diingat agar perbaikan dapat dilakukan dengan benar pada k