Tentang proyek ini
Proyek ini dikembangkan dari goresan sebagai upaya untuk mengukur RPM (Rotasi) yang tepat per Nilai menit) dari berbagai motor menggunakan satu IR sensor, papan Arduino, dan penting bahan utama -Penunjuk Laser (harus Merah).
Proyek ini menggunakan fakta bahwa sensor IR juga membaca rendahnya jumlah radiasi IR yang dilepaskan oleh laser merah. Namun ketika laser biru/hijau digunakan, radiasi IR ini menjadi sangat sedikit dan tegangan baca analog turun menjadi kira-kira. 0.
Ketika bilah kipas yang terpasang ke motor datang di jalur sinar laser, itu menghalangi jalur dan pembacaan turun ke 0. Bilah kipas terus berputar dan posisinya terus berubah dengan pasokan daya yang konstan. Perubahan jalur yang konstan terjadi. Saat jalur menjadi jelas kembali, sinar laser pointer menyerang sensor lagi.
KODE BERBASIS ALGORITMA SINGLE SHOT BARU,UNTUK PENGUKURAN ADAPTIVE LEBIH CEPAT DAN LEBIH BANYAK PERUBAHAN :-
Kode untuk proyek yang saya kembangkan ini menggunakan algoritme yang baru dikembangkan untuk proyek ini. Yang algoritma memang unik dan dibuat untuk melakukan pengukuran dalam waktu kurang dari 40 milidetik dan memberikan hasil yang akurat. Salah satu fitur yang sangat penting dari program ini adalah ia menggunakan metode yang saya sebut Deteksi Tembakan Tunggal untuk Arduino. Ini menghitung RPM motor setiap kali bilah kipas membuat penghalang di jalur sinar laser. Hal ini karena halangan jalur sinar laser menandai 1/n putaran penuh untuk n jumlah bilah di kipas. Jadi, programnya sangat sensitif ke bahkan perubahan menit dalam RPM ( hingga 2 tempat desimal) di setiap 1/n ke revolusi dari yang penggemar pisau lagi di mana n adalah yang nomor dari pisau dari yang penggemar. Oleh karena itu, algoritma Deteksi Bidikan Tunggal yang unik ini memberikan akurasi yang sangat tinggi nilai dari RPM dan sensitivitas yang lebih tinggi terhadap perubahan pengukuran.
Dalam yang di atas ditampilkan gambar dari sebuah keluaran contoh dari yang serial memantau di a ujian lari, yang tarif dari keluaran penyaringan bisa jelas menjadi terlihat yang mana adalah tentang 2 kali a kedua. Itu RPM nilai adalah dihitung sampai dua tempat dari desimal masing-masing waktu.
Setiap orang yang melihat ini harus mencoba proyek ini sekali dan membagikan ulasan berharga Anda. Ceritakan tentang eksperimen Anda dan hasilnya terkait dengan algoritme ini. Saran untuk proyek baru disambut di bagian komentar. Jika Anda menyukai proyek ini, hormati itu.
Ikuti profil saya dengan mengetuk tautan ini (https://create.arduino.cc/projecthub/YASH36) @YASH36 untuk beberapa pembaruan proyek baru.
Sampai saat itu tiba, Tetap Aman dan nikmati Arduino!!
Kode
RPM_counter_101Arduino
Ini adalah kode untuk penghitung RPM.//code by YaSh.int sen =A0;const float wid =0.012; //sesuaikan lebar bilah kipas sesuai kebutuhan Anda.const float rad =0,045; //menyesuaikan radius titik deteksi pada bilah kipas.const float konst =6.2832; // 2*pi.float time_1;float time_2;float vel;float diff;float tnet;float rpm;void setup() { Serial.begin(9600); pinMode(sen,INPUT); Serial.print(" \n silahkan nyalakan motor minimal 3 detik sebelumnya.\n"); delay(3000);}void loop(){ if(analogRead(sen)<950) { time_1 =milis(); penundaan (30); } if(analogRead(sen)>950) { waktu_2 =milis(); diff =(waktu_2-waktu_1); vel =lebar/beda; //kecepatan rotasi tnet =(konst*rad)/vel; //waktu =(2*pi*radius)/kecepatan. rpm =(60000)/tnet; // waktu dalam ms ke menit dan kemudian ke langkah konversi rpm. }Serial.print("\n rpmnya adalah :"); Serial.println( rpm );} Skema
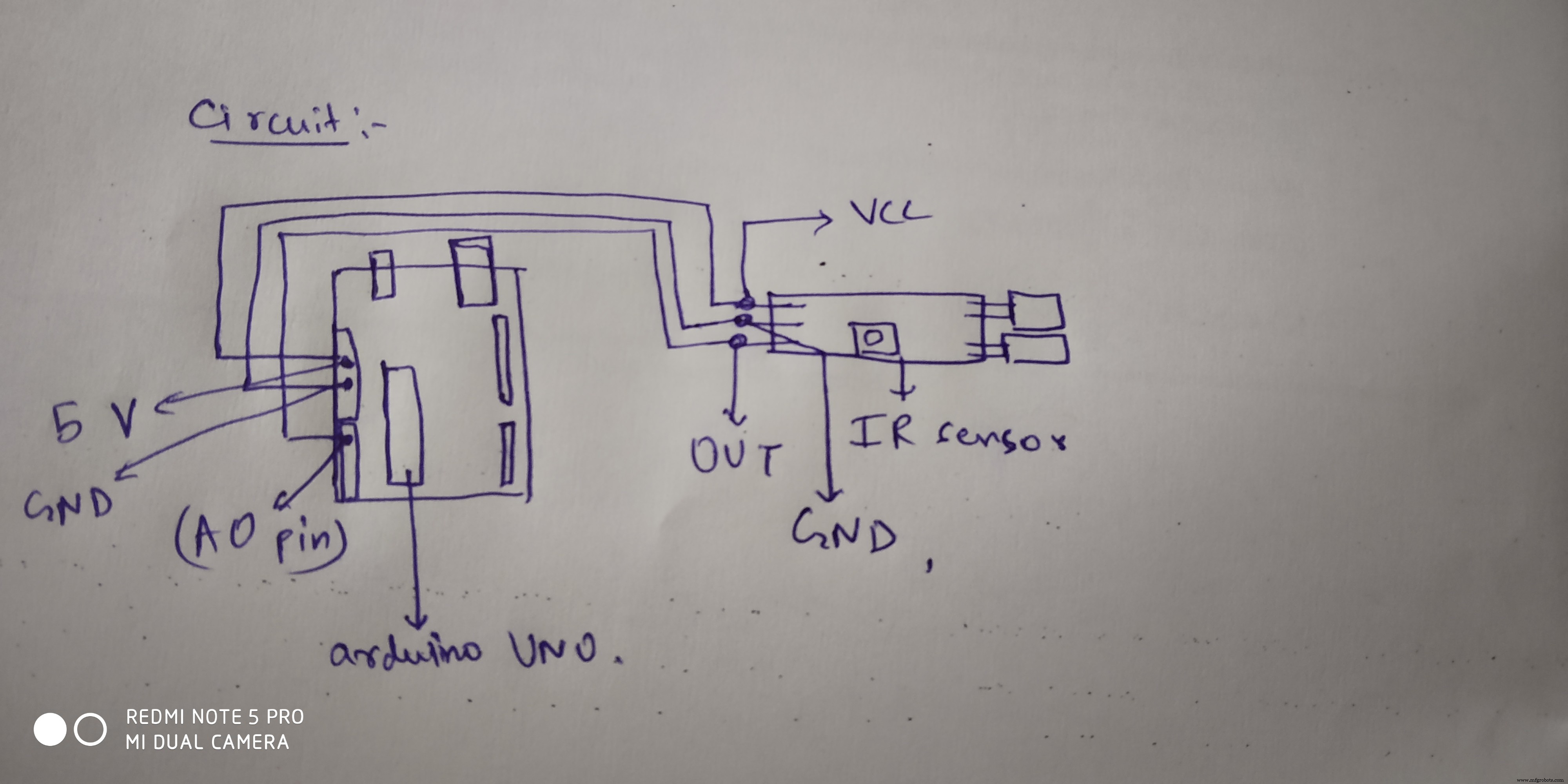
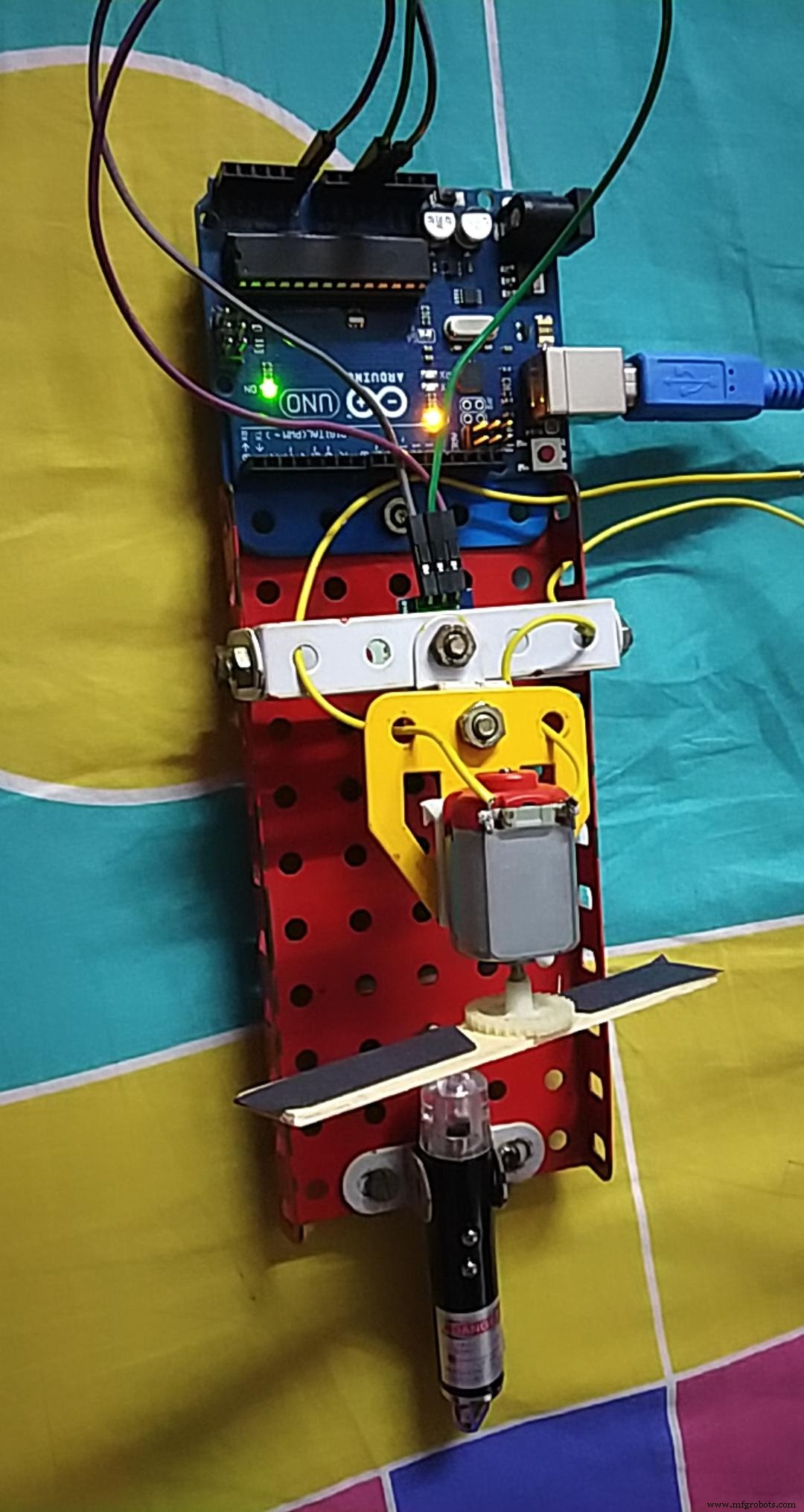
ini adalah gambar untuk penempatan base dan komponen lainnya 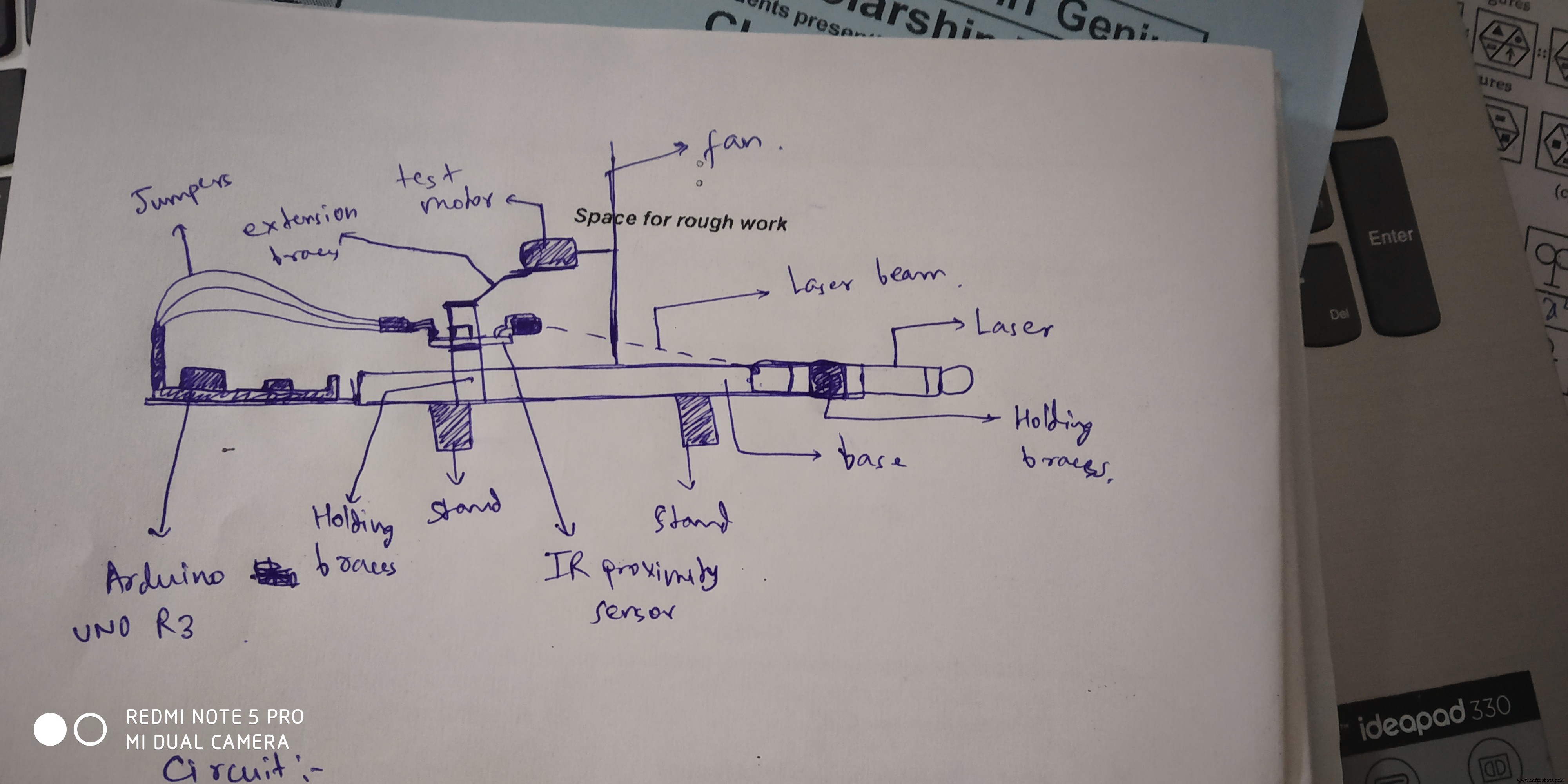 skema untuk menghubungkan sensor ke board arduino
skema untuk menghubungkan sensor ke board arduino