Sistem Kontrol Gerak CNC yang Disederhanakan
Saya baru-baru ini diminta untuk menjelaskan sistem kontrol gerak, yang digunakan dalam peralatan mesin CNC, kepada seseorang di keluarga saya. Menyadari bahwa orang ini tidak memiliki latar belakang manufaktur sama sekali – dan tentu saja tidak memiliki pengalaman dengan hal yang rumit dan teknis ini – saya harus menghubungkan penjelasan saya dengan sesuatu yang umum dan sederhana, memungkinkan mereka untuk dengan mudah memvisualisasikan analogi….seperti mengemudi sebuah mobil.

Meskipun topik ini sangat rumit dan bersifat teknis, saya pikir analogi ini cukup berhasil menyederhanakan subjek, namun tetap memberikan pemahaman dasar yang memadai kepada orang-orang yang tertarik tentang apa yang sedang terjadi. Jelas, subjek teknologi canggih seperti itu dapat mengambil bagian yang lebih baik dari seluruh semester di perguruan tinggi, untuk mendapatkan pemahaman yang menyeluruh, tetapi bagi kita orang-orang sederhana, saya pikir analogi mengemudi akan bekerja dengan baik. Tapi, sebelum kita mulai, kita perlu meletakkan beberapa pekerjaan dasar. Anda perlu memahami dasar-dasar bagaimana perintah yang dimulai di dalam otak kita berjalan melalui kontrol CNC, dan akhirnya memanifestasikan dirinya sebagai gerakan salah satu sumbu linier mesin.
Mari kita anggap program bagian kita (percakapan atau kode-G) tidak lebih dari daftar perintah. Perintah-perintah tersebut diatur oleh kontrol CNC, dan diatur ke dalam kategori yang berbeda untuk masing-masing sumbu individu mesin – dan kemudian diteruskan ke sumbu yang sesuai. Setelah perintah diterima oleh penggerak servo untuk sumbu tertentu, perintah itu dipecah menjadi persyaratan tegangan sederhana yang diperlukan untuk menggerakkan sumbu seperti yang diperintahkan oleh perintah – dan tegangan itu kemudian diterapkan ke motor…menyebabkan motor berputar, dan dengan demikian menyebabkan sumbu bergerak. Saat sumbu bergerak, posisinya saat ini terus dipantau oleh encoder yang dipasang di ujung motor, atau skala kaca yang dipasang di sepanjang sumbu. Perangkat pemantau ini memberikan umpan balik ke penggerak servo sehingga perubahan perintah tegangan dapat dilakukan jika perlu… tegangan lebih berarti motor berputar lebih cepat, dan sumbu mengejar jika tertinggal; dan tegangan yang lebih rendah berarti motor berputar lebih lambat, oleh karena itu memperlambat sumbu jika mulai berjalan terlalu jauh di depan gerakan yang diperintahkan.
Sekarang, dengan itu, mari kita terapkan analogi mengemudi kita. Pertama-tama kita memerlukan beberapa perintah untuk diikuti…misalkan rute yang akan kita tempuh ke tujuan akhir kita adalah jalur pahat pemotong kita, dan tanda batas kecepatan di sepanjang jalan akan bertindak sebagai laju gerak makan yang kita perintahkan. Otak Anda adalah kontrol CNC, otot Anda akan bertindak sebagai penggerak servo, dan ekstremitas Anda bisa menjadi motor servo yang mengontrol sumbu Anda. Kami akan menggunakan mata kami dan speedometer untuk umpan balik. Sekarang, karena tidak ada dalam hidup yang bisa sempurna atau tepat, kita perlu memberikan toleransi yang dapat diterima untuk posisi yang kita perintahkan… jadi katakanlah seluruh lebar jalan adalah toleransi posisi kita, dan selama kita tetap di atas aspal, kita siap berangkat!
Dalam analogi pertama ini, bayangkan diri Anda diparkir di jalan raya yang ditinggalkan, di antah berantah, dan jalan itu dibuat lurus seperti anak panah di depan Anda. Anda telah diperintahkan untuk melakukan perjalanan sejauh satu mil, mengikuti garis kuning ganda di tengah jalan, dan batas kecepatan untuk jalan ini adalah 100mph. Untuk memulai, otak Anda memberi tahu otot-otot di kaki Anda untuk memberikan tekanan pada pedal gas dan mobil mulai bergerak. Untuk mengikuti garis kuning, otak Anda akan menggunakan umpan balik visual dari mata Anda, untuk mengontrol otot-otot di lengan Anda, dan menjaga kendaraan tetap bergerak dalam garis lurus - dan tergantung pada umpan balik yang diterima dari speedometer, otak Anda juga harus mengikuti garis kuning. kendalikan otot-otot di pergelangan kaki Anda untuk menambah atau mengurangi tekanan yang diterapkan pada akselerator untuk mempertahankan kecepatan 100mph yang diperintahkan. Toleransi posisi sebenarnya bukan masalah di sini. Oke, saya menyadari itu sangat disederhanakan, tetapi sekarang setelah Anda melihat bagaimana analogi mengemudi saya dapat diterapkan, kita dapat melangkah lebih jauh.
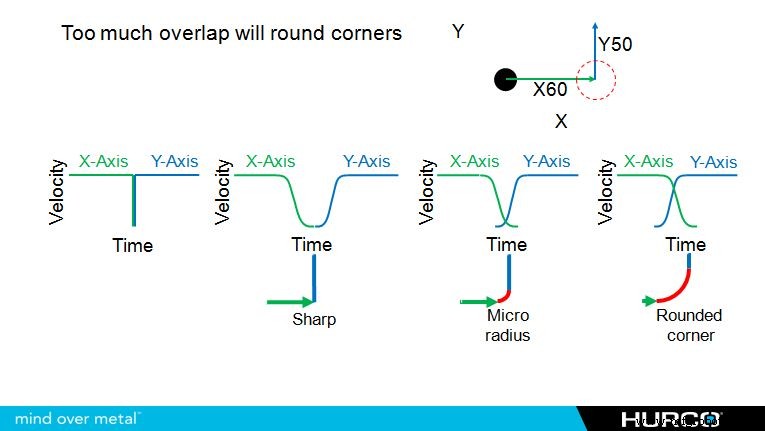
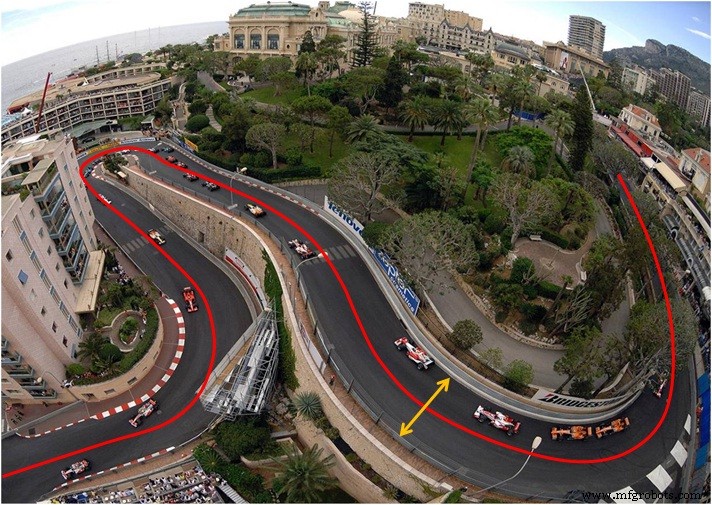
Menggunakan perintah yang sama seperti di atas (mengikuti garis kuning ganda untuk satu mil, dengan kecepatan 100mph, dan menggunakan seluruh lebar jalan sebagai toleransi yang dapat diterima) mari kita lanjutkan ke analogi nomor dua…kita duduk di tengah jalan. bagian terakhir dari jalan lurus yang akan kita temui untuk satu mil berikutnya. Jalan yang terbentang di depan kami berangin dan berbukit, dan beroperasi dalam batasan yang kami perintahkan akan sedikit lebih menantang kali ini. Kami mempercepat hingga kecepatan 100mph yang kami perintahkan, tetapi dengan cepat dihadapkan dengan rintangan pertama kami ... belokan 90 derajat penuh ke kanan. Menyadari bahwa kami tidak dapat berhasil menavigasi tikungan ini, dan masih mempertahankan kecepatan kami saat ini, kami harus mengurangi kecepatan kami. Kita harus menemukan lintasan yang mulus melalui belokan yang memungkinkan kita untuk mempertahankan kecepatan sedekat mungkin dengan kecepatan yang kita perintahkan, tetapi tidak menyebabkan kita lari dari jalan. Bereaksi terhadap umpan balik yang diterima dari perangkat visual kita, otak kita mengirimkan perintah untuk mengontrol gerakan yang diperlukan dan menyesuaikan kecepatan dan jalur lintasan agar berhasil menavigasi belokan.
Kemudian, hampir seketika, kami menemukan diri kami menghadapi rintangan yang lebih menantang…sebuah kurva “S”, dengan tanjakan menanjak di babak pertama, dan lari menuruni bukit di babak kedua. Meskipun situasi ini akan ditangani seperti belokan 90 derajat sederhana di atas - mengendalikan kecepatan dan lintasan kami untuk jalur yang paling mulus dan tercepat, sambil tetap menjaganya dengan aman di jalan - kami sekarang harus bereaksi terhadap perubahan ketinggian juga… meningkatkan tekanan ke pedal gas saat mendaki bagian pertama belokan, tetapi mengurangi tekanan itu, dan menerapkan rem jika perlu, pada bagian terakhir sehingga kami tidak melebihi kecepatan 100mph yang kami perintahkan ketika gravitasi mulai mengambil alih. Aksi dan reaksi ini akan terus berlanjut untuk setiap rintangan yang kita hadapi sampai kita mencapai atau tujuan akhir… akhir program!
Ketika berbicara tentang kontrol gerak, kita juga harus membahas sesuatu yang disebut "blok melihat ke depan", yang biasanya diukur dengan jumlah blok yang dapat diproses oleh kontrol sebelumnya – memungkinkan kontrol untuk lebih mempersiapkan diri menghadapi rintangan yang akan datang. Dalam analogi mengemudi kami, blok melihat ke depan dapat diilustrasikan sebagai layar LCD, dipasang di dasbor yang akan memberi kami peta lintasan, sehingga kami mungkin dapat mengubah lintasan pada rintangan kami saat ini, jadi kami akan dalam posisi yang lebih baik untuk menjalankan rintangan di masa depan dengan lancar. Jelas, semakin rumit jalur pahat pemotong, semakin banyak pandangan ke depan yang mungkin diperlukan untuk mempertahankan rute paling mulus dan tercepat ke garis finish. Meskipun setiap pembuat peralatan mesin memiliki cara yang sama untuk menangani blok, beberapa di antaranya lebih efektif daripada yang lain.
Kontrol WinMax Hurco memiliki sesuatu yang disebut UltiMotion…sistem kontrol gerak berbasis perangkat lunak yang dipatenkan yang menawarkan tampilan blok variabel; yang memungkinkan kontrol untuk melihat hingga 10.000 blok ke masa depan bila diperlukan, dan dapat menghasilkan pengurangan waktu siklus hingga 30% - terutama pada jalur alat yang lebih rumit yang memerlukan lebih banyak pandangan ke depan. Jelas, pada jalur pemotong yang lebih sederhana – seperti yang ada di dua analogi pertama kami di atas – kontrol akan membutuhkan jauh lebih sedikit pandangan ke depan daripada skenario terakhir itu… oleh karena itu lebih banyak memori RAM kontrol yang dibebaskan, dan dapat digunakan lebih baik untuk yang lain. sesuatu. Kontrol yang tidak memiliki kemampuan unik untuk "beradaptasi" dengan kebutuhan kontrol saat ini, tidak dapat menggunakan kembali memori RAM kontrol yang tersedia, dan tidak dapat memanfaatkan variabilitas semacam ini.



