Bagaimana Robot Mencapai Otonomi Penuh?
Ketika kebanyakan orang memikirkan robot yang sepenuhnya otonom, mereka khawatir tentang skenario AI yang fantastis yang memiliki sedikit dasar pada fakta nyata – dan misteri – yang kita ketahui tentang kesadaran. Sementara terpaku pada hal itu, menjadi lebih sulit bagi orang untuk melihat nilai praktis dari robot yang dapat berfungsi secara independen dan tanpa pengawasan substansial ketika ada berbagai pekerjaan, proses, dan industri yang MEMBUTUHKAN lebih banyak bantuan untuk meningkatkan profitabilitas dan dampak positifnya.
Pada saat yang sama, otonomi robot telah menjadi korban dari beberapa definisi – dan harapan – yang tidak selalu membantu untuk memahami apa yang dibutuhkan robot untuk menjadi otonom dan di mana otonomi dapat dicapai paling cepat.
Dalam memungkinkan robot mencapai otonomi penuh, beberapa kriteria harus dipenuhi:
- Robot harus dapat memperoleh informasi yang berarti tentang lingkungannya sendiri
- Robot harus dapat memproses informasi tersebut dengan cara yang terstruktur dan dapat digunakan
- Robot harus dapat merencanakan tindakannya dalam menanggapi informasi tersebut
- Robot harus dapat menjalankan rencana yang dibuatnya tepat waktu
Dalam semua keadaan ini, penting untuk memahami beberapa hal lagi dalam hal bagaimana parameter ini disusun:
- Robot harus memiliki tujuan. Sementara kita secara tradisional mengasosiasikan otonomi manusia dengan kemampuan untuk menetapkan tujuan sendiri, tidak ada parameter yang diharapkan di mana robot masa kini akan menjadi sadar diri.
- Otonomi robot harus menggunakan kasus tertentu. Mobil yang sepenuhnya otonom dapat berfungsi pada tingkat yang berbeda – beberapa di jalan raya, yang lain di semua medan. Tergantung pada situasinya, keduanya dapat menjalankan tingkat otonomi yang sama.
- Desain bekerja paling baik ketika meminimalkan kebutuhan input manusia – sementara aplikasi “cobot” otonom tertentu dapat membantu mengoptimalkan produktivitas atau pencapaian tujuan yang diinginkan, dalam banyak keadaan, otonomi tidak akan menjadi kualifikasi yang memadai di mana keterlibatan langsung manusia diperlukan.
Jadi, bagaimana kita pergi dari titik A ke B? Bagaimana robot "dapat diprogram" tradisional menjadi sepenuhnya otonom? Nah, di situlah kesenangan dimulai!
Mendapatkan Informasi Tentang Lingkungan
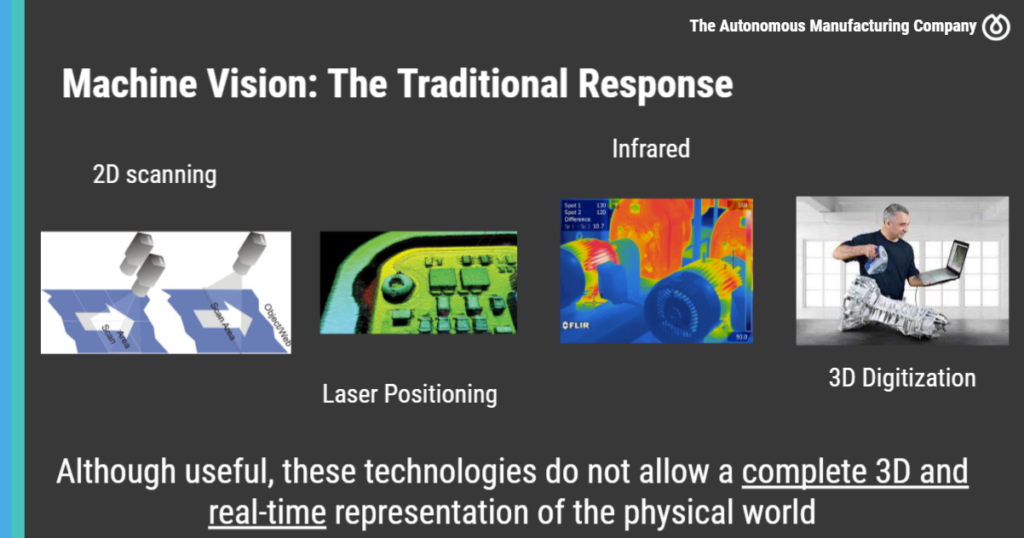
Ada berbagai solusi untuk memberi tahu robot apa yang terjadi di sekitarnya. Lidar, radar, sonar, sensor taktil, semua jenis sistem penglihatan yang berbeda, mekanisme komunikasi yang berbeda dalam jumlah tak terbatas dari sensor ekstra-robot, kamera atau sistem informasi lokal yang mungkin berupa audio atau video. Semua ini hanyalah upaya untuk memberikan robot jenis indera yang sama seperti yang dimiliki manusia, dan telah lama menjadi standar di bidang seperti kontrol mesin otomatis untuk proses otomatisasi yang sangat khusus.
Penting untuk mempertimbangkan bahwa penginderaan bukan satu-satunya batasan di sini. Misalnya, dalam sistem industri yang sekarang mendukung IoT (Internet of Things) – atau setidaknya berjejaring – proses yang berbeda dan pengontrol logika yang dapat diprogram dapat dihubungkan bersama dalam string berbeda yang digunakan untuk menjalankan proses yang berbeda. Apa yang dapat dilakukan dari sana, bagaimanapun, adalah memasukkan informasi tersebut ke dalam proses robotik untuk memahami posisi, orientasi, dan manipulasi yang diperlukan untuk terjadi pada suatu objek.
Di luar keadaan industri, model yang sama dapat diterapkan, tetapi model tersebut perlu dikontekstualisasikan dengan jenis informasi terhubung yang tepat. Misalnya, jika seseorang ingin membuat robot untuk perawatan medis atau lansia, kemampuan penginderaan eksternal mungkin berguna untuk mengelola kesehatan pasien, tetapi tanpa keamanan dan anonimisasi yang tepat, mereka juga dapat menawarkan risiko privasi atau agensi ketika menyangkut siapa yang sedang dirawat dan oleh robot apa dalam situasi apa.
Dengan cara yang sama, 5G dipandang sebagai peluang besar untuk berkoordinasi antara mobil self-driving masa depan dan menghasilkan efisiensi dalam mengotomatisasi setiap aspek mengemudi dan transportasi – semuanya sambil mengoptimalkan hal-hal seperti kondisi jalan, kemacetan, jalan yang tersumbat, dan banyak lagi. Meskipun ini adalah aplikasi yang sangat kuat, cara informasi diterjemahkan ke robot harus ditangani dengan hati-hati. Dengan kekuatan besar datang tanggung jawab besar, setelah semua.
Memproses Informasi dengan Cara Terstruktur
Bagaimana seseorang seharusnya mencerna informasi dengan cara yang dapat digunakan? Ketika kita memikirkan bagaimana kita melakukannya sebagai manusia, itu adalah sifat kedua atau seringkali naluriah dalam hal bagaimana kita membuat keputusan. Apa yang sering gagal kita sadari adalah bahwa begitu banyak keputusan kita didasarkan pada sifat-sifat yang diperoleh secara evolusioner, sosial, atau perilaku – serta karakteristik kepribadian kita – yang membuat cara kita beroperasi terkadang tampak deterministik, meskipun bukannya tanpa kejutan atau kesenangan!
Namun, ketika berbicara tentang robot, kami tidak suka kejutan! Kejutan yang menyenangkan, tentu saja – hal-hal seperti menemukan robot lebih baik atau lebih efisien daripada yang kita harapkan adalah hal yang hebat, tetapi jika itu berarti bahwa kita perlu mengantisipasi setiap fungsi yang mungkin dari robot otonom – baik itu dalam pengiriman, transportasi, penyediaan perawatan , penanganan material, inspeksi, pemeliharaan prediktif, proses industri, atau sekadar robot anjing yang melakukan backflip – mengelola ekspektasi kita jauh lebih disukai daripada “gagal berfungsi”.
Karena itu, penting untuk disadari bahwa membuat robot otonom jarang berarti bahwa segala sesuatunya berjalan di luar kebiasaan. Sementara beberapa perusahaan dan akademisi sedang mencari cara untuk menyederhanakan model penginderaan dan pemrosesan dasar robot otonom, model tersebut pada akhirnya harus berkontribusi pada model proses yang menyederhanakan kemampuan robot untuk menggunakan informasi dengan cara yang dapat ditindaklanjuti.
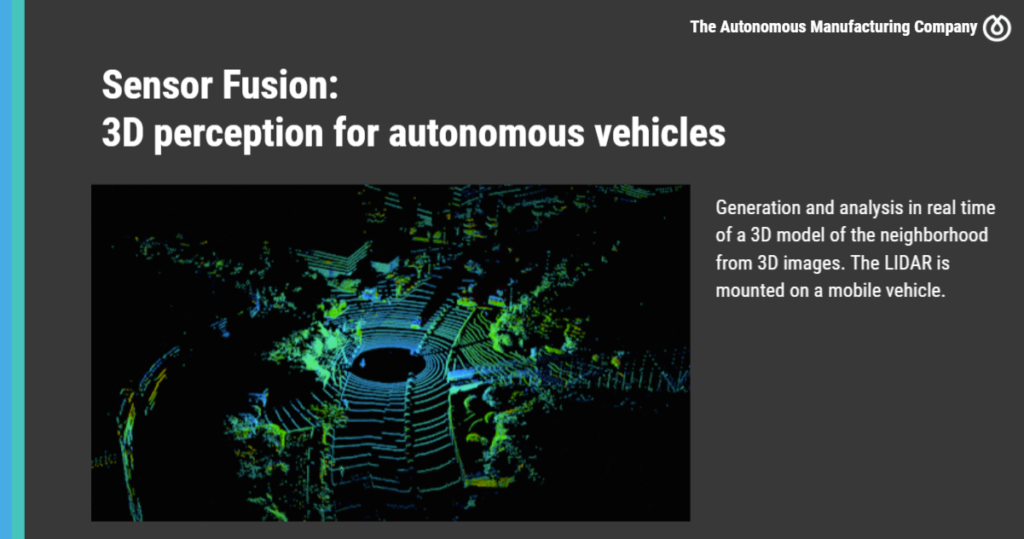 Sensor Fusion adalah langkah penting untuk menyediakan kemampuan persepsi waktu nyata robot yang memungkinkan otonomi menjadi realitas.
Sensor Fusion adalah langkah penting untuk menyediakan kemampuan persepsi waktu nyata robot yang memungkinkan otonomi menjadi realitas.
Merencanakan Tindakan dari Data
Data yang dihasilkan oleh mekanisme penginderaan robot dapat dicerna dalam berbagai cara. Pada akhirnya, untuk data visual 3D, cara paling sederhana yang mungkin dilakukan adalah dengan memecah dan mengintegrasikan kembali data pada bentuk ke dalam objek keseluruhan. Ini adalah proses paralel yang membutuhkan akumulasi banyak operasi kecil – sementara otak manusia berfungsi sangat fleksibel dengan cara ini, menghasilkan model yang andal untuk jenis pemrosesan ini memerlukan pengulangan dan validasi yang signifikan.
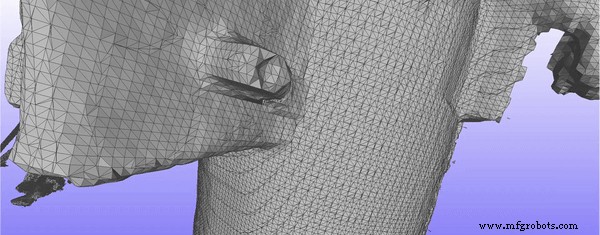 Di sini, bagian-bagian industri dipecah menjadi segitiga kecil, membuatnya lebih mudah untuk menafsirkan bagian sebagai mesin.
Di sini, bagian-bagian industri dipecah menjadi segitiga kecil, membuatnya lebih mudah untuk menafsirkan bagian sebagai mesin.
Aspek yang paling berguna dari proses ini adalah memasukkan data ke dalam model proses keseluruhan untuk apa pun yang perlu dilakukan robot. Angkat dan bawa sesuatu? Jatuhkan surat di kotak surat? Melukis atau mengelas sesuatu bersama-sama? Masing-masing tindakan ini memerlukan pemahaman holistik tentang sifat, lokasi, posisi, dan hasil yang tidak sesuai dengan tujuan (misalnya, surat masuk ke dalam kotak, tetapi ada lubang di bagian bawah dan jatuh ke semak-semak).
Pada saat yang sama, untuk memperluas contoh surat ini, sasaran mundur harus ditetapkan untuk mencapai hasil yang masih dapat diterima dengan cara otomatis tanpa membebani prioritas utama fungsi otonom robot. Sederhananya:robot otonom harus bisa berimprovisasi, tetapi merencanakan improvisasi itu membutuhkan banyak pekerjaan.
Seperti yang pernah dikatakan Mark Twain, "Biasanya saya membutuhkan lebih dari tiga minggu untuk mempersiapkan pidato dadakan yang baik." Ini bukan sekadar omong kosong, tetapi sebenarnya sangat instruktif tentang bagaimana manusia bekerja. Meskipun kita mungkin sering fokus pada tugas yang ada, kita memiliki seperangkat kebiasaan bawah sadar yang canggih dengan bakat tambahan seperti "proprioreception", yang tidak dikenali dengan baik.
Meskipun ini adalah keterampilan yang sempurna untuk robot yang perlu melakukan segalanya mulai dari berayun dari pohon hingga berburu di sabana dan mungkin menemukan roda dan menembak sedikit setelahnya. Butuh jutaan tahun untuk mengembangkan kemampuan ini, jadi jangan heran bahwa membuat robot berfungsi secara mandiri mungkin membutuhkan waktu lebih dari satu sore.
Jadi, dalam konteks ini, apa jawaban untuk robot? Yah, sama seperti manusia memvisualisasikan tindakan mereka sebelum melakukannya, menghasilkan simulasi atau kembar digital dari fungsi robot otonom dan menggunakannya untuk menyuntikkan harapan model proses (seperti di mana biasanya kotak surat berada atau seperti apa tampilannya) adalah langkah terbesar yang dapat Anda ambil untuk membuat robot otonom yang berguna.
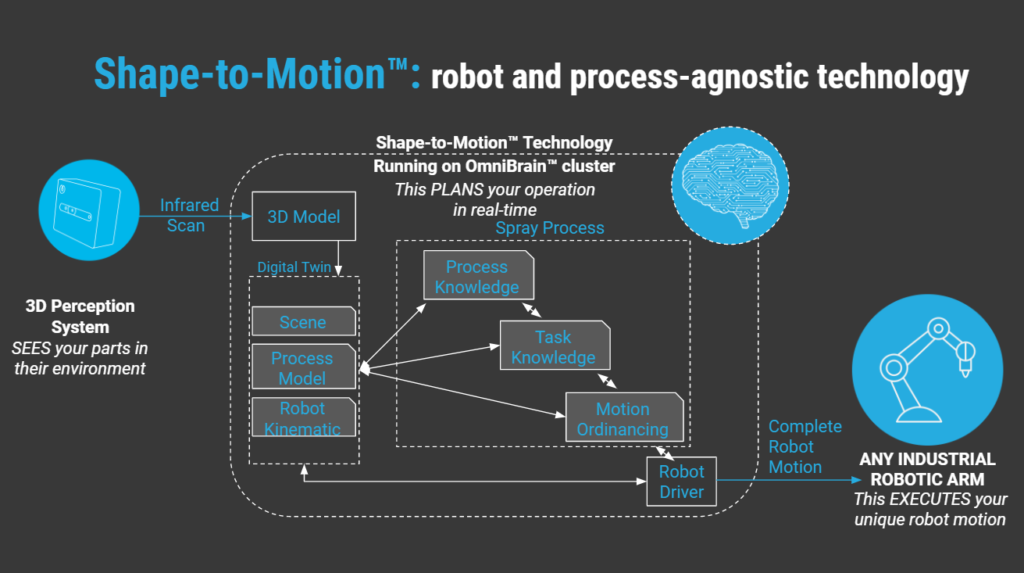 Teknologi Shape-to-Motion™ menggunakan model proses dan pendekatan hierarkis untuk memprioritaskan tindakan untuk robot, membuat fungsi otonom dapat diakses di lingkungan industri.
Teknologi Shape-to-Motion™ menggunakan model proses dan pendekatan hierarkis untuk memprioritaskan tindakan untuk robot, membuat fungsi otonom dapat diakses di lingkungan industri.
Melaksanakan Rencana
Setelah Anda memiliki model proses, simulasi yang cukup, dan mekanisme penginderaan yang dikalibrasi dengan benar, eksekusi hanyalah masalah pengamatan dan pengoptimalan. Jika robot otonom yang Anda buat langsung memenuhi standar Anda, maka tidak perlu melakukan itu. Nilai dasar robot adalah konsistensinya, dan robot industri modern yang ada sangat andal. Menambahkan lapisan persepsi dan kecerdasan untuk membuatnya responsif ke bagian dan posisi yang berbeda menciptakan dunia otonomi baru yang ingin kita jelajahi
Apa selanjutnya untuk otonomi itu? Menyederhanakan cara aplikasi dibangun, seperti yang disebutkan di atas, tetapi juga meningkatkan luasnya sensor, pengaturan robot, tugas, lingkungan, dan banyak lagi yang dapat dieksekusi. Hal yang konyol adalah bahwa otomatisasi menciptakan produktivitas, yang pada akhirnya meningkatkan pertumbuhan, pendapatan, dan permintaan tenaga kerja. Melihat otomatisasi sebagai ancaman bagi tenaga kerja adalah ancaman nyata , sambil membawa otomatisasi ke lebih banyak ruang yang tidak disukai pekerja akan membuat pekerjaan lebih kreatif, inovatif, dan menyenangkan dari sebelumnya – jika orang bahkan perlu bekerja sama sekali. Selamat menikmati!
 Robot manufaktur otomatis untuk proses pengecatan dan penyemprotan adalah kunci untuk menghilangkan pengerjaan ulang dan meningkatkan kualitas dan produktivitas operasi finishing yang ada.
Robot manufaktur otomatis untuk proses pengecatan dan penyemprotan adalah kunci untuk menghilangkan pengerjaan ulang dan meningkatkan kualitas dan produktivitas operasi finishing yang ada.
Omnirobotic menyediakan Teknologi Robotika Otonom untuk Proses Penyemprotan, memungkinkan robot industri untuk melihat bagian-bagian, merencanakan program gerak mereka sendiri dan menjalankan proses pelapisan dan penyelesaian industri yang penting. Lihat jenis pengembalian apa yang bisa Anda dapatkan dari sini , atau pelajari lebih lanjut tentang bagaimana Anda bisa mendapatkan keuntungan dari sistem manufaktur otonom .


