Mengoptimalkan sensor kemiringan/sudut presisi tinggi:Menetapkan kinerja dasar
Pada bagian pertama dari seri ini, kami meninjau struktur internal akselerometer MEMS presisi tinggi 3-sumbu. Dalam artikel kedua ini, kami akan meninjau cara memperoleh set data awal yang baik untuk menetapkan kinerja dasar dan memvalidasi tingkat kebisingan seperti apa yang diharapkan dalam analisis data berikutnya.
Sementara output analog dari akselerometer dapat terhubung ke sistem akuisisi data analog untuk analisis data, produsen sering kali menyediakan papan evaluasi yang dioptimalkan untuk ditempatkan langsung ke sistem pelanggan untuk kemudahan pembuatan prototipe dengan sistem tertanam yang ada. Untuk tujuan ilustrasi untuk artikel ini, papan evaluasi faktor bentuk kecil EVAL-ADXL35x digunakan. Untuk pencatatan dan analisis data, EVAL-ADXL35x dihubungkan ke papan mikrokontroler SDP-K1 dan diprogram menggunakan lingkungan Mbed. Mbed adalah lingkungan pengembangan sumber terbuka dan gratis untuk papan mikrokontroler berbasis ARM. Ini memiliki kompiler online dan memungkinkan pengembang memulai dengan cepat. Papan SDP-K1, saat terhubung ke PC, muncul sebagai drive eksternal. Untuk memprogram papan, cukup seret dan lepas file biner yang dihasilkan oleh kompilator ke dalam drive SDP-K1.
3, 4
Setelah sistem Mbed mencatat data melalui UART, kami sekarang memiliki lingkungan pengujian dasar untuk mencoba eksperimen akselerometer dan mengalirkan output ke terminal sederhana untuk pencatatan data dan analisis lebih lanjut. Penting untuk dicatat bahwa terlepas dari kecepatan data keluaran akselerometer, kode Mbed hanya mencatat register pada 2 Hz. Logging lebih cepat dari ini dimungkinkan di Mbed, tetapi berada di luar cakupan artikel ini.
Kumpulan data awal yang baik membantu menetapkan kinerja dasar dan memvalidasi tingkat kebisingan seperti apa yang diharapkan di sebagian besar analisis data kami selanjutnya. Menggunakan lengan ragum artikulasi PanaVise
5
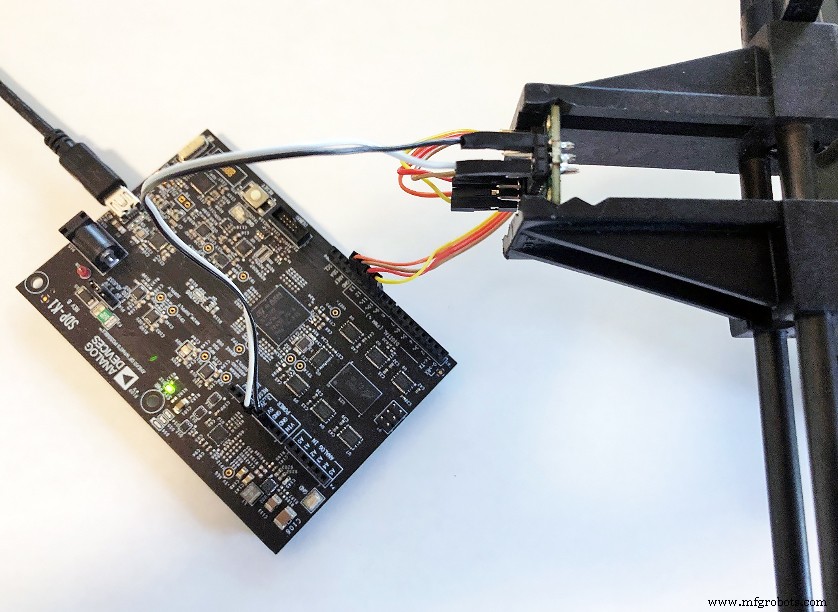
yang memiliki dudukan cangkir hisap memungkinkan permukaan kerja yang cukup stabil dalam pengaturan bangku karena menempel pada permukaan kerja kaca. Papan ADXL355 (dipegang dari samping) sama stabilnya dengan meja lab dalam konfigurasi ini. Pengguna listrik yang lebih maju mungkin memperhatikan bahwa pemasangan ragum ini akan memiliki beberapa risiko gerakan terbalik, tetapi ini adalah metode sederhana dan hemat biaya yang memungkinkan perubahan orientasi sehubungan dengan gravitasi. Dengan papan ADXL355 ditempatkan di dudukan seperti yang ditunjukkan pada Gambar 1, satu set data selama 60 detik diambil untuk analisis pertama.
klik untuk gambar ukuran penuh Gambar 2. Pengaturan pengujian menggunakan dudukan EVAL-ADXL35x, SDP-K1, dan PanaVise. (Sumber:Perangkat Analog)
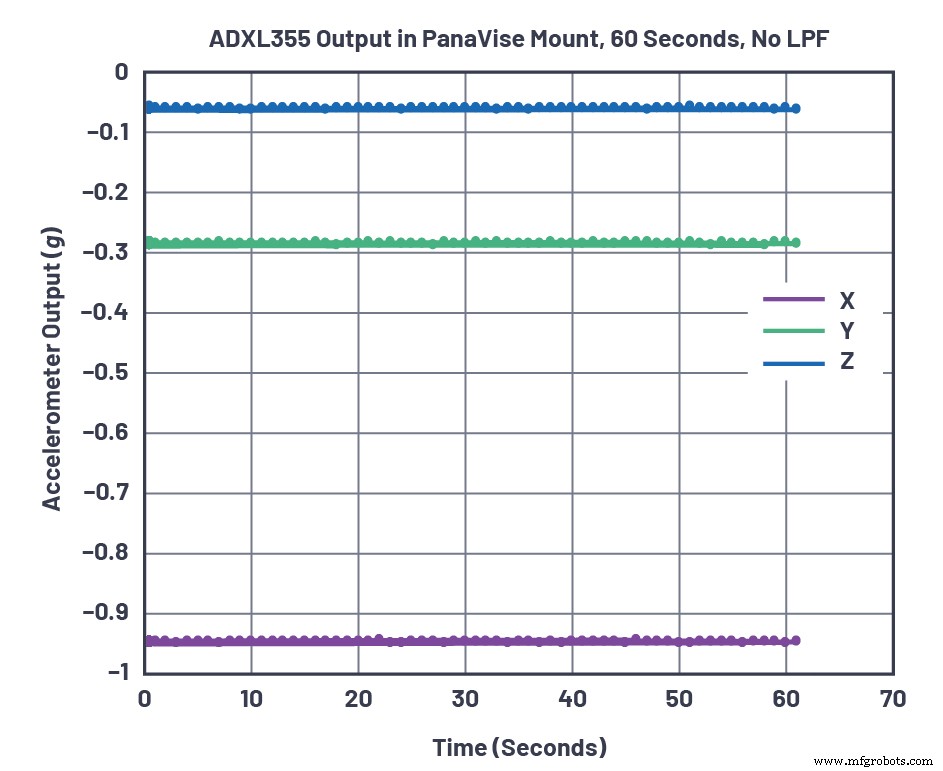
klik untuk gambar ukuran penuh Gambar 2. Data ADXL355 tanpa low-pass filter (register 0x28=0x00), diambil selama 1 menit. (Sumber:Perangkat Analog)
Mengambil 120 titik data dan mengukur standar deviasi menunjukkan kebisingan di kisaran 800 g hingga 1,1 mg . Dari spesifikasi kinerja khas ADXL355 di lembar data, kami melihat kepadatan kebisingan terdaftar sebagai 25 g /√Hz. Dengan pengaturan filter lolos rendah (LPF) default, akselerometer memiliki bandwidth sekitar 1000 Hz. Kebisingan diperkirakan mencapai 25 g /√Hz × 1000 Hz =791 g rms, dengan asumsi filter dinding bata. Dataset pertama ini lolos uji sniff pertama. Agar akurat, konversi dari kerapatan spektral kebisingan ke kebisingan rms harus memiliki faktor untuk mewakili fakta bahwa LPF digital tidak memiliki roll-off tak terbatas (yaitu, filter dinding bata). Beberapa menggunakan koefisien 1,6× untuk roll-off RC kutub tunggal 20 dB/dekade sederhana, tetapi filter low-pass digital ADXL355 bukanlah filter RC kutub tunggal. Bagaimanapun, dengan asumsi koefisien antara 1 dan 1,6 setidaknya membawa kita ke perkiraan yang tepat untuk ekspektasi kebisingan.
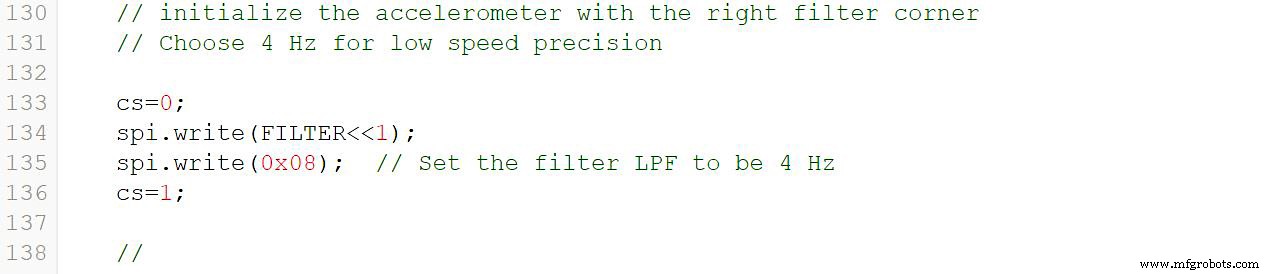
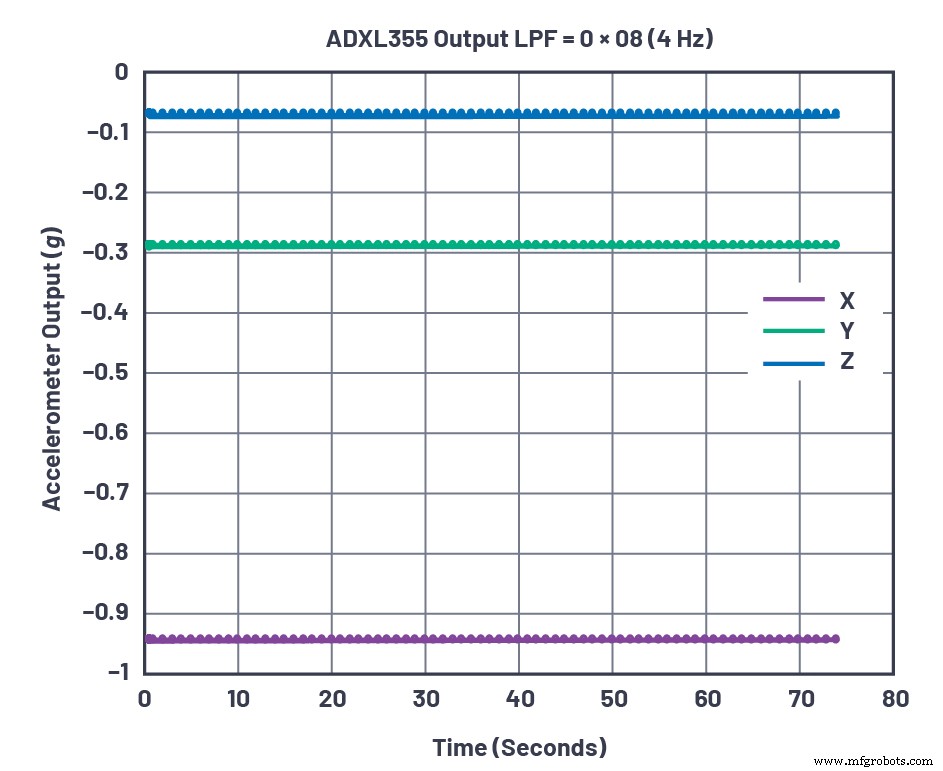
Untuk banyak aplikasi penginderaan presisi, 1000 Hz adalah bandwidth yang terlalu lebar untuk sinyal yang diukur. Untuk membantu mengoptimalkan ruang pertukaran antara bandwidth dan kebisingan, ADXL355 memiliki filter low-pass digital terpasang. Untuk pengujian berikutnya, kami menetapkan LPF menjadi 4 Hz, yang seharusnya memiliki pengurangan kebisingan bersih dengan faktor 1000/√4 16. Hal ini dilakukan secara sederhana di lingkungan Mbed menggunakan struktur sederhana yang ditunjukkan pada Gambar 3 , sedangkan datanya ditunjukkan pada Gambar 4.
6
Setelah penyaringan, kebisingan turun secara nyata seperti yang diharapkan. Hal ini ditunjukkan pada Tabel 1 di bawah ini.
Gambar 3. Mbed kode untuk konfigurasi register. (Sumber:Perangkat Analog)
klik untuk gambar ukuran penuh Gambar 4. Data ADXL355 dengan LPF disetel ke 4 Hz (register 0x28=0x08), diambil selama 1 menit. (Sumber:Perangkat Analog)
Tabel 1. Kebisingan yang Diharapkan dan Terukur dari ADXL355 (Sumber:Perangkat Analog)
Tabel 1 menunjukkan bahwa noise pada sumbu y dengan pengaturan saat ini lebih tinggi dari yang diharapkan secara teori. Setelah menyelidiki kemungkinan penyebabnya, kami melihat bahwa getaran kipas tambahan pada laptop dan peralatan lab lainnya kemungkinan besar memanifestasikan dirinya dalam sumbu y sebagai kebisingan. Untuk menguji ini, catok diputar untuk menempatkan sumbu x ke posisi di mana sumbu y untuk pengujian ini dan sumbu kebisingan yang lebih tinggi pindah ke sumbu x. Perbedaan kebisingan antara sumbu kemudian tampak sebagai kebisingan instrumentasi dan bukan perbedaan intrinsik dalam tingkat kebisingan di seluruh sumbu akselerometer. Jenis pengujian ini secara efektif merupakan pengujian “Hello World” untuk akselerometer dengan noise rendah, sehingga memberikan keyakinan dalam pengujian lebih lanjut.
Untuk mengetahui seberapa besar efek kejutan termal pada ADXL355, kami menggunakan pistol udara panas
7
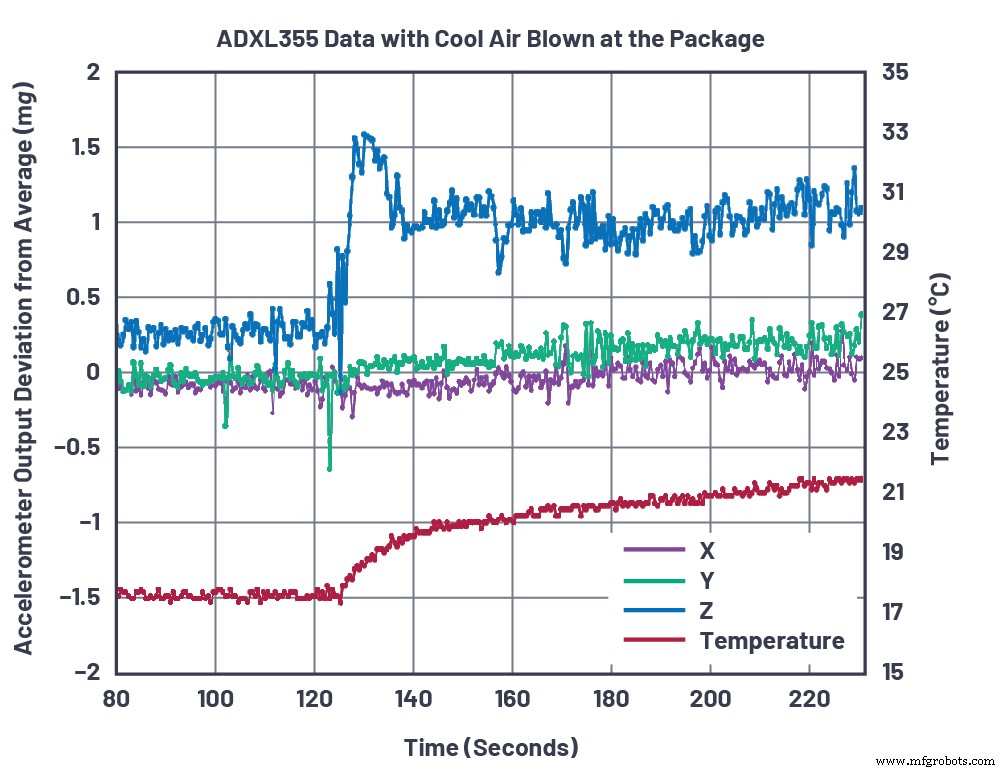
dan masukkan ke mode udara yang lebih dingin (hampir beberapa derajat di atas suhu kamar) untuk menerapkan tekanan termal ke akselerometer. Suhu juga dicatat menggunakan sensor suhu terpasang ADXL355. Eksperimen menggunakan catok untuk menempatkan ADXL355 secara vertikal sehingga senapan angin dapat meniupkan udara di bagian atas paket. Hasil yang diharapkan dari percobaan ini adalah bahwa koefisien suhu offset akan muncul saat die memanas, tetapi setiap tekanan termal diferensial akan muncul hampir seketika. Dengan kata lain, jika sumbu individu penginderaan sensitif terhadap tegangan termal diferensial, diharapkan untuk melihat tonjolan pada keluaran akselerometer. Menghapus nilai rata-rata dari data saat tidak ada suara memungkinkan perbandingan yang mudah dari ketiga sumbu secara bersamaan. Hasilnya ditunjukkan pada Gambar 5.
klik untuk gambar ukuran penuh Gambar 5. Data kejutan termal ADXL355 menggunakan pistol udara panas pada pengaturan dingin. (Sumber:Perangkat Analog)
Seperti dapat dilihat pada Gambar 5, senapan angin meniupkan udara yang sedikit lebih hangat ke paket keramik, yang tertutup rapat ke lingkungan. Ini menghasilkan ~1500 g pergeseran pada sumbu z, jumlah pergeseran yang jauh lebih kecil pada sumbu y (mungkin ~100 g ), dan hampir tidak ada pergeseran pada sumbu x. Meskipun banyak produk pelanggan akhir memiliki penutup di bagian atas PCB yang mendistribusikan tegangan termal diferensial, penting untuk mempertimbangkan jenis tegangan transien cepat ini, yang dapat memanifestasikan dirinya dalam kesalahan offset seperti yang terlihat dalam pengujian sederhana ini.
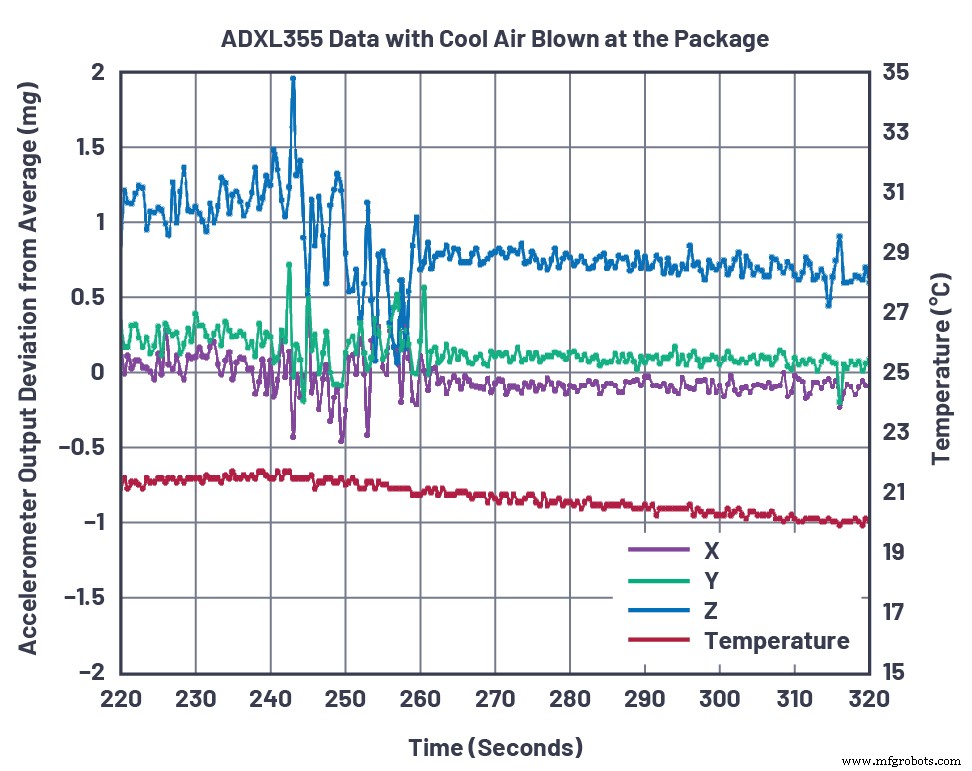
Gambar 6 menunjukkan efek polaritas yang berlawanan saat pistol udara panas dimatikan.
klik untuk gambar ukuran penuh Gambar 6. Kejutan termal ADXL355 dengan senapan angin mati pada t =240 detik. (Sumber:Perangkat Analog)
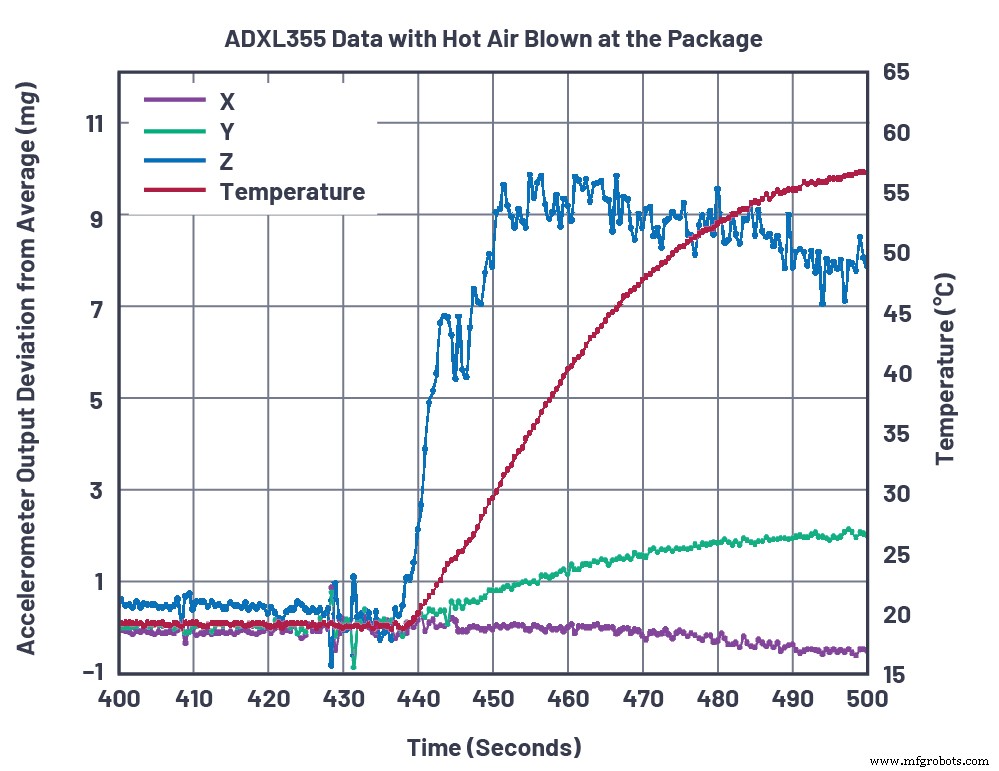
Efek ini bahkan lebih terasa ketika pistol udara digunakan dalam pengaturan panas; yaitu, ketika kejutan suhu lebih besar besarnya. Output dari pistol udara Weller berada di kisaran ~400 °C, jadi penting untuk menerapkannya dari jarak jauh untuk mencegah kerusakan akibat panas berlebih atau sengatan panas. Dalam pengujian ini, udara panas dihembuskan sekitar 15 cm dari ADXL355, yang menghasilkan kejutan suhu hampir seketika ~40°C, seperti yang ditunjukkan pada Gambar 7.
klik untuk gambar ukuran penuh Gambar 7. Kejutan termal ADXL355 dengan pistol udara panas. (Sumber:Perangkat Analog)
Meskipun jumlah kejutan termal cukup kuat, masih mengejutkan untuk melihat seberapa cepat sumbu z merespons dalam percobaan ini daripada sumbu x dan y. Dengan menggunakan koefisien suhu offset dari lembar data, dan dengan perubahan suhu 40°C, orang akan mengharapkan untuk mengamati sekitar 100 g /°C × 40 °C =4 mg pergeseran, yang sumbu x dan y akhirnya mulai menunjukkan. Namun, mencatat 10 mg . yang hampir instan pergeseran sumbu z menunjukkan bahwa ini adalah efek berbeda yang sedang ditangani daripada pergeseran offset karena suhu. Ini adalah hasil dari tegangan/regangan termal diferensial pada sensor dan paling jelas terlihat pada sumbu z karena sensor ini lebih sensitif terhadap tegangan diferensial daripada x dan y, seperti yang dijelaskan sebelumnya dalam artikel ini.
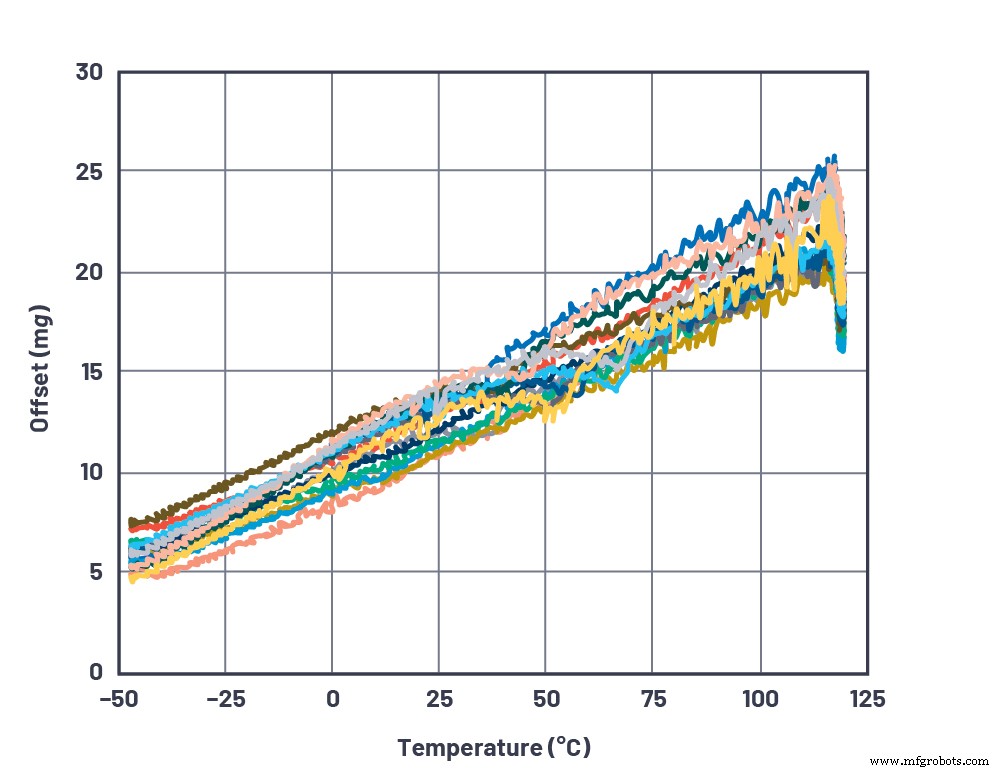
Koefisien suhu tipikal offset ADXL355 (tempco offset) ditentukan pada ±100 g /°C di lembar data. Penting untuk memahami metodologi pengujian yang digunakan di sini karena suhu offset diukur dengan akselerometer dalam oven. Oven perlahan-lahan menggenjot melalui kisaran suhu sensor, dan kemiringan offset diukur. Contoh tipikal ditunjukkan pada Gambar 8.
klik untuk gambar ukuran penuh Gambar 8. Karakterisasi suhu berbasis oven ADXL355. (Sumber:Perangkat Analog)
Ada dua efek yang dimainkan dalam plot ini. Salah satunya adalah offset tempco seperti yang dicirikan dan didokumentasikan dalam lembar data. Ini dapat diartikan sebagai nilai rata-rata dari banyak bagian dari –45 °C hingga +120 °C karena oven menaikkan suhu pada 5 °C/menit tetapi tanpa waktu perendaman. Ini akan diturunkan dari plot yang mirip dengan Gambar 9 dan akan memanggil sekitar 18 mg lebih dari 165 °C, atau sekitar 109 g /°C, yang berada sedikit di luar nilai tipikal 100 g /°C, tetapi dalam kisaran minimum dan maksimum seperti yang ditentukan dalam lembar data. Namun, perhatikan sisi kanan Gambar 9 karena perangkat terus berendam pada 120 °C selama sekitar 15 menit. Saat perangkat berada pada suhu yang panas, jumlah pergeseran offset yang sebenarnya turun dan meningkat. Dalam hal ini, nilai rata-rata mendekati 10 mg lebih dari 165 °C atau sekitar 60 g /°C offset tempco. Efek kedua yang berperan kemudian adalah tegangan termal diferensial karena massa bukti sensor menstabilkan suhu di seluruh perangkat silikon dan tegangan kemudian dikurangi. Ini adalah efek yang terlihat dalam pengujian senapan angin yang ditunjukkan pada Gambar 6 hingga Gambar 8 dan penting untuk dipahami bahwa efek ini beroperasi pada skala waktu yang lebih cepat daripada tempcos offset jangka panjang seperti yang tercantum dalam lembar data. Ini bisa bermanfaat untuk banyak sistem, yang, karena dinamika termal keseluruhannya, kemungkinan akan memiliki ramp yang jauh lebih lambat dari 5°C/menit.
Di bagian ketiga seri ini, kita akan mengeksplorasi fakta lain yang memengaruhi stabilitas dan kemudian menawarkan rekomendasi desain sistem mekanis untuk meningkatkan kinerja keseluruhan akselerometer MEMS presisi tinggi 3-sumbu.
Referensi
1
Chris Murphy. “Memilih Akselerometer MEM yang Paling Cocok untuk Aplikasi Anda—Bagian 1.” Dialog Analog, Vol. 51, No. 4, Oktober 2017.
2
Chris Murphy. “Akselerometer Kemiringan Mengukur Suhu dan Adanya Getaran.” Dialog Analog, Agustus 2017.
3
Sistem evaluasi SDP-K1. Perangkat Analog, Inc.
4
Mbed:Panduan Pengguna untuk SDP-K1. Perangkat Analog, Inc.
5
Dudukan lengan artikulasi PanaVise. PanaVise.
6
Kode MB. Perangkat Analog, Inc.
7
Pistol udara pemanas/pendingin Weller 6966C. Lebih baik.