Integrasi ROS2 + DDS:Ketika Ekosistem Menggabungkan | RTI

Seperti yang diumumkan pada Juli 2018, rilis kedua dari ROS2 – dijuluki “Bouncy Bolson” – sekarang tersedia untuk diunduh dari situs web ROS2 untuk platform Intel Linux, Windows, dan iOS.
Jika ini terdengar asing, ROS (Robot Operating System) adalah kerangka kerja sumber terbuka dan rangkaian alat untuk membangun sistem robot, dan hadir dalam dua rasa utama:ROS – yang asli versi penelitian menggunakan Python dan XML, dan ROS2 – versi peningkatan kinerja yang menggunakan DDS sebagai kerangka konektivitasnya.
Tentang ROS2 Bouncy Bolson
Rilis 'Bouncy' spesial karena menyertakan RTI Connext DDS dalam distribusi biner di bawah lisensi non-komersial. DDS tingkat profesional kini menjadi opsi bebas biaya bagi peneliti, evaluator, dan akademisi yang menggunakan ROS2 untuk aplikasi robotika.
Ini berarti bahwa alat dan ekosistem layanan DDS tersedia untuk semua pengguna ROS2, berkat interoperabilitas berbasis standar yang melekat pada DDS termasuk:
- Konsol Admin RTI:alat bantu untuk mendiagnosis masalah konektivitas sistem.
- Monitor Sistem RTI:alat terbaik untuk menyetel dan mengoptimalkan kinerja sistem.
- Layanan Perekaman RTI: perekaman dan pemutaran data topik dengan bandwidth tinggi dan berdurasi panjang dari sistem Anda.
- Layanan Perutean RTI: solusi out-of-the-box yang bertindak sebagai jembatan/gerbang arsitektur.
Mari kita lihat bagaimana Konsol Admin RTI dapat mempermudah mendiagnosis dan memahami masalah konektivitas ROS2. Baru-baru ini saya mengumpulkan sumber data LiDAR untuk ROS2, dan upaya awal saya untuk menampilkan data menggunakan RViz menghasilkan:tidak ada data. Terminal untuk RViz tidak menghasilkan banyak pesan yang berguna:

Saya juga menggunakan beberapa perintah diagnostik bawaan ROS2 untuk membantu menentukan penyebab non-komunikasi. Misalnya, saya dapat menggunakan "daftar topik ros2" untuk menampilkan item data yang sedang aktif:
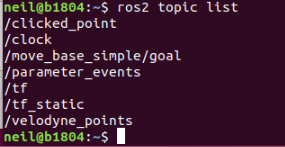
Saya tertarik dengan topik “/velodyne_points”:

Apakah penerbit “/velodyne_points” menghasilkan data?:
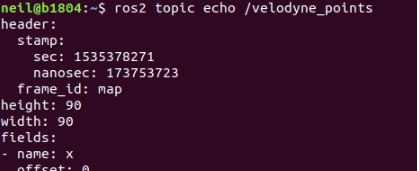
Ya . . . jadi mengapa data tidak ditampilkan oleh RViz?
Konsol Admin
Mari kita coba mendiagnosis masalah ini menggunakan Konsol Admin RTI, yang tersedia di Peluncur RTI:

Sejak Konsol Admin diluncurkan, ini memberi tahu saya bahwa ada masalah di antara peserta jaringan DDS (perhatikan indikator kotak X merah):
Memperluas “Domain 0” dan menyoroti topik yang saya minati (/velodyne_points) segera menunjukkan penyebab masalah – ketidakcocokan QoS:
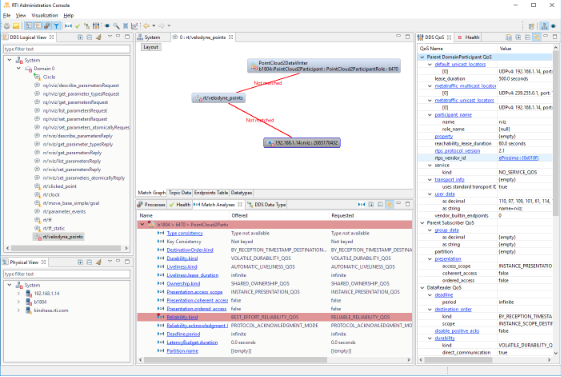
Penerbit saya menawarkan keandalan “Upaya Terbaik”, tetapi pelanggan RViz memerlukan koneksi "Dapat diandalkan". Daripada membiarkan ketidakcocokan ini berlanjut, DDS menolak koneksi dan mencegah ketidakcocokan agar tidak terus diperhatikan.
Ketidakcocokan QoS ini segera diungkapkan oleh Konsol Admin, bersama dengan detail setiap peserta lain dalam jaringan ROS2 DDS ini, termasuk semua topik internal ROS2 yang biasanya tersembunyi. Sekilas saya dapat menentukan bahwa:
- Ada beberapa entri log kesalahan – akan dilihat nanti.
- Ada beberapa topik “Hanya penulis” dan “Hanya pembaca”. Ini adalah topik yang dapat menerbitkan atau berlangganan suatu topik, tetapi tidak memiliki pelanggan atau penerbit pelengkap saat ini.
- Sistem ini menjalankan campuran lapisan RMW dari vendor DDS yang berbeda. Ini bukan masalah. DDS dirancang untuk interoperabilitas multi-vendor.
- Saat menjalankan dengan lapisan RMW Connext, informasi kode jenis disertakan dalam lalu lintas penemuan DDS, dan dapat dengan mudah dilihat di Konsol Admin:
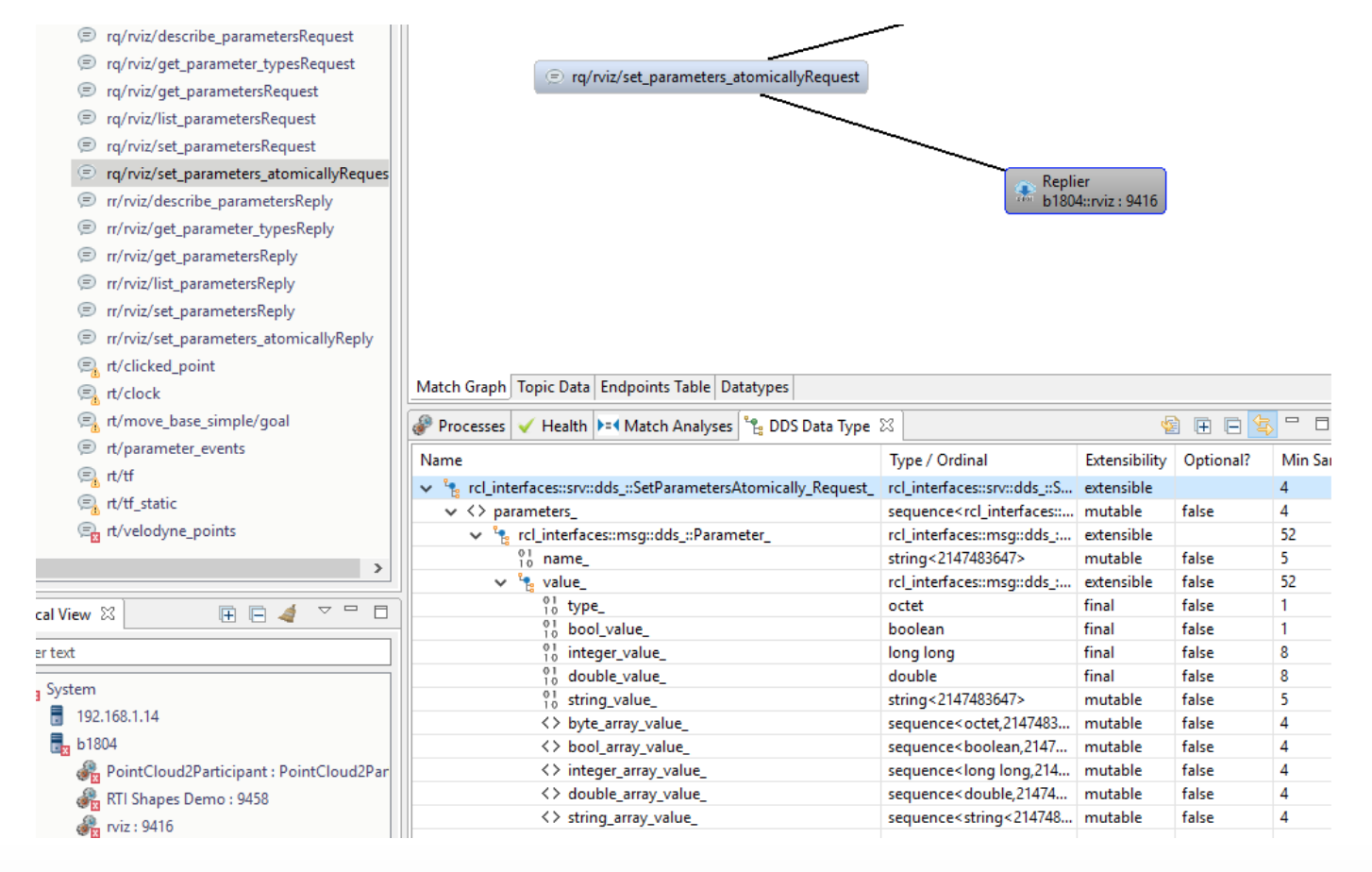
Saat menggunakan lapisan RMW lain, informasi ini disembunyikan.
Konsol Admin juga dapat berlangganan topik data dan mencetak atau memvisualisasikan nilai datanya:
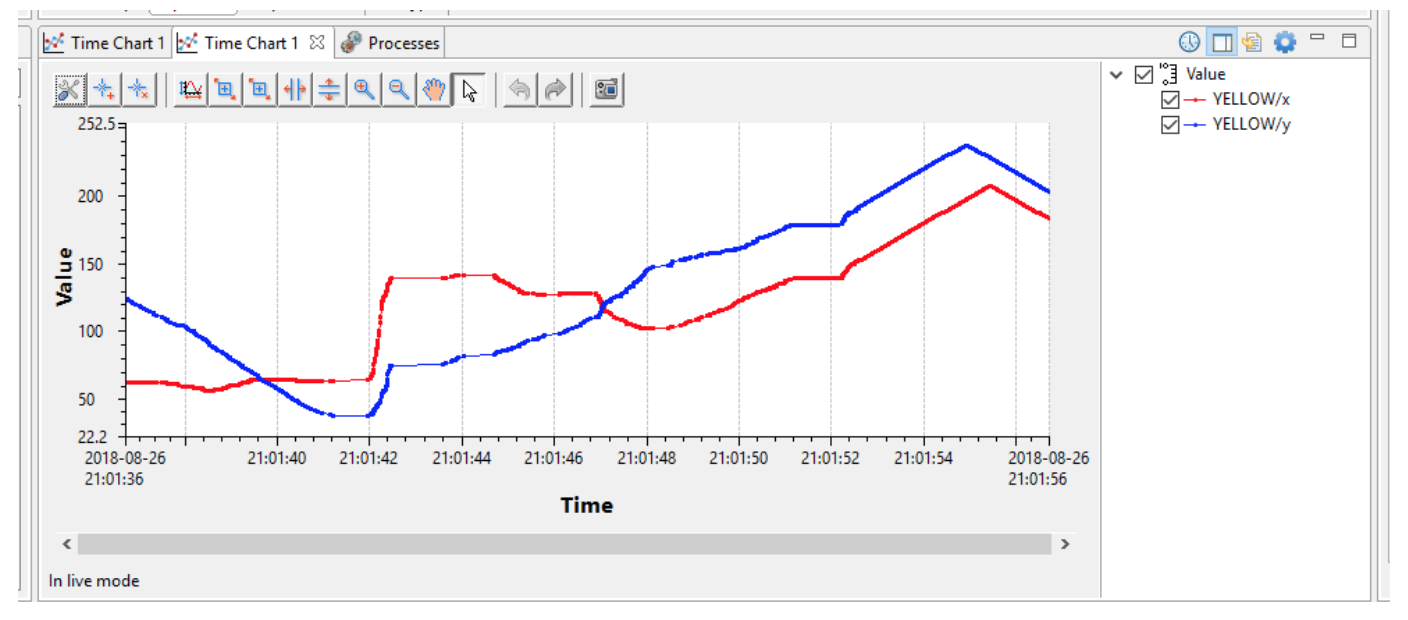
Dengan bantuan Konsol Admin, saya dapat mengidentifikasi ketidakcocokan QoS yang mencegah transfer data dan menjalankan sistem dalam beberapa menit.
Baca lebih banyak entri blog yang menyoroti kekuatan ekosistem gabungan ROS2/DDS – untuk memperluas, mendiagnosis, dan mengoptimalkan sistem ROS / ROS2, dan menyediakan visualisasi 3D yang disempurnakan ke sistem DDS murni .
ROS2 + DDS:Panduan Lapangan untuk Interoperabilitas
ROS2 + DDS Mainkan Lagi
ROS 2 dan DDS:Interoperabilitas Mendorong Robotika Generasi Selanjutnya


