

Sensor

Manufaktur industri
Sensor arus banyak digunakan dalam berbagai aplikasi. Teknik umum adalah penginderaan arus resistif di mana penurunan tegangan melintasi resistor shunt diukur untuk menentukan arus yang tidak diketahui. Solusi berbasis resistor shunt tidak menyediakan isolasi galvanik dan tidak hemat daya, terutama saat mengukur arus besar.
Teknik lain yang banyak digunakan didasarkan pada efek Hall. Sensor arus efek Hall memberikan tingkat keamanan yang lebih tinggi karena isolasi galvaniknya antara sensor dan arus yang akan diukur. Ini juga menghindari disipasi daya yang cukup besar dari resistor shunt yang digunakan dalam metode penginderaan arus resistif.
Dalam artikel ini, kita akan melihat dasar-dasar sensor arus efek Hall.
Struktur sensor arus loop terbuka berbasis efek Hall ditunjukkan pada Gambar 1.
Arus yang akan diukur mengalir melalui konduktor yang berada di dalam inti magnet. Dengan cara ini, arus menciptakan medan magnet di dalam inti. Bidang ini diukur dengan sensor efek Hall yang ditempatkan di celah udara inti.
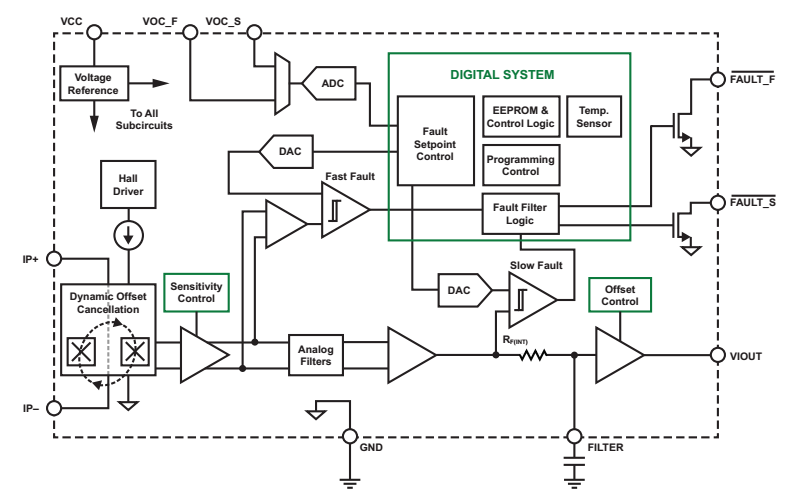
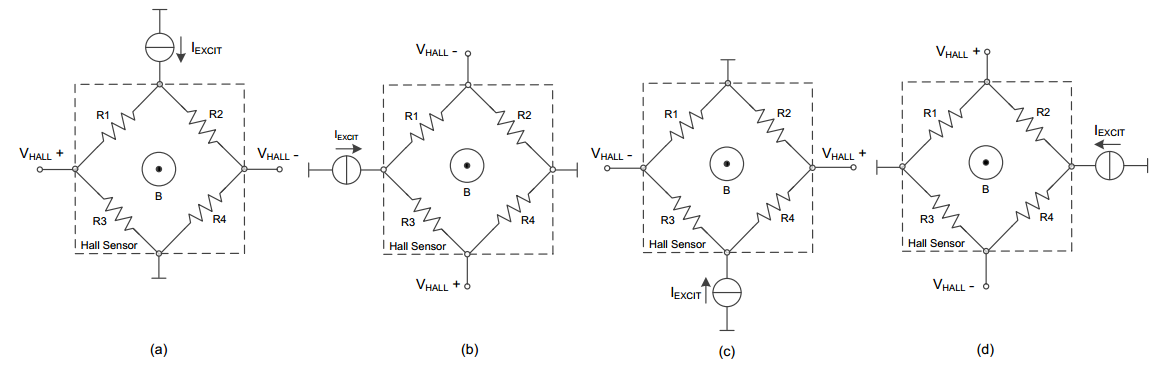
Output dari sensor Hall adalah tegangan yang sebanding dengan medan magnet inti yang juga sebanding dengan arus input. Sinyal yang dihasilkan oleh perangkat Hall biasanya diproses oleh sirkuit pengkondisi sinyal. Sirkuit pengkondisi sinyal dapat berupa tahap amplifikasi sederhana atau sirkuit yang lebih rumit yang dirancang untuk menghilangkan kesalahan penyimpangan perangkat Hall, dll.
Asumsikan tidak ada inti magnet. Medan magnet pada jarak r dari penghantar lurus yang panjangnya tak terhingga yang dialiri arus listrik I diberikan oleh:
\[B =\frac{µ_0I}{2\pi r} ~ , ~ _0 =4\pi \times 10^{-7}\frac{H}{m }\]
di mana 0 adalah permeabilitas ruang bebas. Untuk I=1 A, r=1 cm, kita peroleh:
\[B =2 \times 10^{-5}~Tesla =0.2~Gauss\]
Untuk mengetahui seberapa kecil medan magnet ini, perhatikan bahwa medan magnet bumi sekitar 0,5 Gauss. Oleh karena itu, sangat sulit untuk mengukur arus 1-A dengan merasakan medan magnet yang dihasilkannya di ruang bebas. Untuk mengatasi masalah ini, kita dapat menggunakan inti magnet untuk membatasi dan memandu medan magnet yang dihasilkan oleh arus. Inti menawarkan jalur permeabilitas tinggi untuk medan magnet dan bertindak sebagai konsentrator medan. Medan magnet di dalam inti bisa ratusan atau ribuan kali lebih besar dari yang dapat dihasilkan oleh arus tertentu di ruang bebas.
Seperti yang ditunjukkan pada Gambar 1, inti magnetik dirancang dengan celah udara di mana sensor Hall ditempatkan. Celah udara dapat menyebabkan fenomena fluks fringing di mana beberapa garis fluks menyimpang dari jalur lurusnya dan karenanya, tidak melewati sensor seperti yang diharapkan. Efek pinggiran ini ditunjukkan pada Gambar 2.
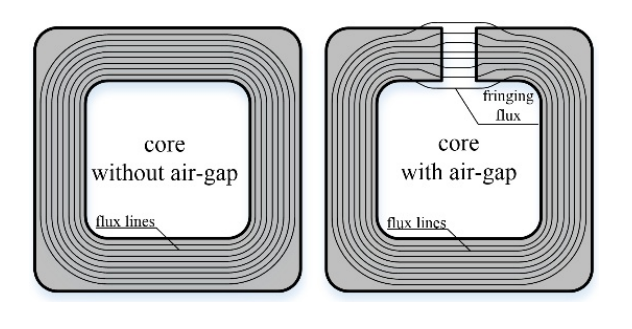
Karena efek fringing, kerapatan fluks magnet yang dirasakan oleh perangkat Hall bisa lebih kecil daripada kerapatan fluks magnet di dalam inti. Dengan kata lain, celah udara dapat mengurangi kemanjuran inti dalam mengubah arus primer menjadi medan magnet yang kuat. Namun, jika panjang celah kecil dibandingkan dengan luas penampang celah, efek efek fringing bisa relatif kecil.
Kita membutuhkan celah udara untuk dapat mengukur medan magnet di dalam inti. Selain itu, celah udara memungkinkan kita untuk mengubah keengganan inti secara keseluruhan. Perhatikan bahwa arus tinggi dapat menciptakan medan magnet besar di dalam inti dan menjenuhkannya. Hal ini dapat membatasi arus maksimum yang dapat diukur. Menyesuaikan panjang celah udara, kita dapat mengubah tingkat saturasi inti. Gambar 3 menunjukkan bagaimana kerapatan fluks magnet yang dirasakan berubah dengan panjang celah udara untuk inti tertentu.
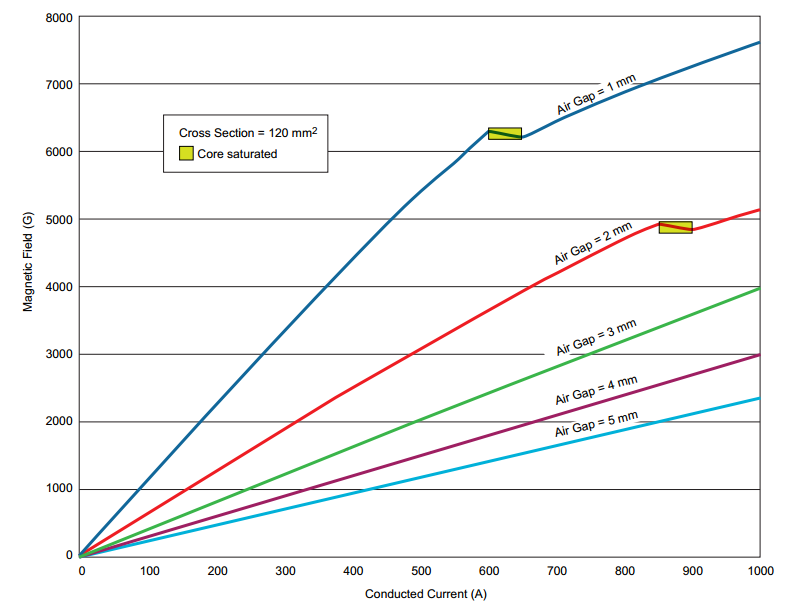
Dengan celah udara yang lebih kecil, kita dapat mencapai penguatan magnetik yang lebih besar (gauss-per-ampere gain). Namun, celah udara yang lebih kecil dapat membuat inti jenuh pada arus yang relatif lebih kecil. Oleh karena itu, panjang celah secara langsung mempengaruhi arus maksimum yang dapat diukur. Selain panjang celah, ada faktor lain, seperti bahan inti, dimensi inti, dan geometri inti, yang menentukan efisiensi inti magnet. Untuk informasi lebih lanjut tentang core yang cocok untuk aplikasi arus tinggi (>200 A), silakan lihat catatan aplikasi ini dari Allegro.
Dengan konfigurasi loop terbuka, efek non-ideal, seperti linearitas dan kesalahan gain, dapat mempengaruhi akurasi pengukuran. Misalnya, jika sensitivitas sensor berubah dengan suhu, kesalahan yang bergantung pada suhu akan muncul pada output. Selain itu, dengan penginderaan arus loop terbuka, inti mengalami kejenuhan. Selain itu, offset sensor Hall serta koersivitas inti dapat menyebabkan kesalahan.
Teknik penginderaan arus efek Hall loop tertutup diilustrasikan pada Gambar 4.
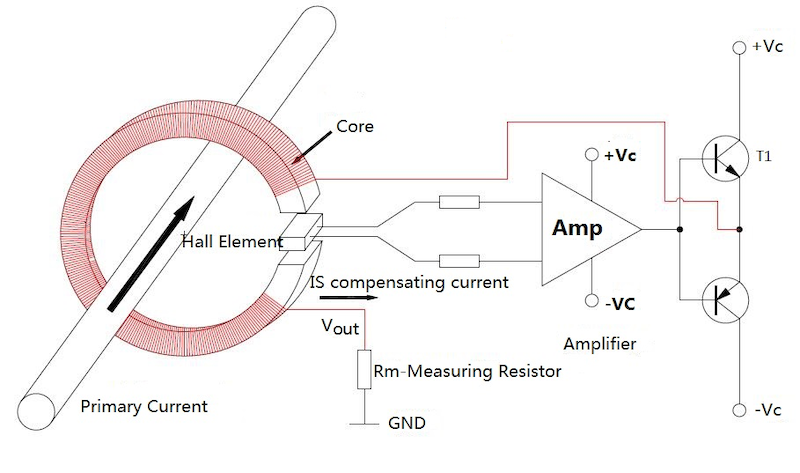
Seperti namanya, teknik ini didasarkan pada konsep umpan balik negatif. Dalam hal ini, ada belitan sekunder yang digerakkan oleh output dari jalur umpan balik. Jalur umpan balik merasakan medan magnet di dalam inti dan menyesuaikan arus melalui belitan sekunder sehingga medan magnet total inti menjadi sama dengan nol. Mari kita lihat bagaimana sirkuit ini bekerja.
Arus yang akan diukur mengalir melalui konduktor utama dan menciptakan medan magnet di dalam inti. Bidang ini diukur dengan sensor efek Hall yang ditempatkan di celah udara inti. Output dari sensor Hall, yang merupakan tegangan sebanding dengan medan magnet inti, diperkuat dan diubah menjadi sinyal arus yang melewati belitan sekunder. Sistem dirancang sedemikian rupa sehingga arus yang melalui belitan sekunder menghasilkan medan magnet yang melawan medan magnet arus primer. Dengan total medan magnet sama dengan nol, kita harus memiliki:
\[N_pI_p =N_sI_s\]
di mana Np dan Ns masing-masing adalah jumlah belitan gulungan primer dan sekunder; dan sayap dan sayas adalah arus primer dan arus sekunder. Pada Gambar 4, kita memiliki Np =1 dan \[V_{keluar} =R_m \times I_s\]. Oleh karena itu, kita memperoleh:
\[V_{out} =R_m \times \frac{1}{N_s} \times I_p\]
Ini memberi kita tegangan yang sebanding dengan arus primer. Perhatikan bahwa faktor proporsionalitas, \[R_m \times \frac{1}{N_s}\], adalah fungsi dari jumlah lilitan dan nilai resistor shunt. Jumlah lilitan adalah nilai konstan dan resistor juga sangat linier.
Umpan balik negatif yang digunakan dalam arsitektur loop tertutup memungkinkan kita untuk mengurangi efek non-ideal seperti linearitas dan kesalahan gain. Itu sebabnya, tidak seperti konfigurasi loop terbuka, arsitektur loop tertutup tidak terpengaruh oleh penyimpangan dalam sensitivitas sensor. Oleh karena itu, konfigurasi loop tertutup menawarkan akurasi yang lebih tinggi. Sensor arus loop tertutup lebih kuat terhadap saturasi inti karena kerapatan fluks magnet di dalam inti sangat kecil.
Dengan penginderaan loop tertutup, koil sekunder digerakkan secara aktif oleh penguat daya tinggi. Komponen tambahan yang digunakan dalam arsitektur loop tertutup menghasilkan area PCB yang lebih besar, konsumsi daya yang lebih tinggi, serta harga yang lebih tinggi.
Masalah stabilitas adalah kelemahan lain dari sensor arus loop tertutup. Dengan konfigurasi loop tertutup, kita perlu menurunkan fungsi transfer sistem dan memastikan bahwa sistem stabil. Sistem yang tidak stabil dapat menunjukkan overshoot atau dering sebagai respons terhadap perubahan cepat pada arus input. Untuk membuat sistem loop tertutup stabil, biasanya kita perlu membatasi bandwidthnya. Namun, mengurangi bandwidth sistem dapat meningkatkan waktu responsnya dan membuat sistem tidak dapat merespons perubahan input yang cepat. Konfigurasi loop terbuka biasanya diharapkan menunjukkan waktu respons yang lebih cepat.
Perhatikan bahwa offset sensor Hall dapat menyebabkan kesalahan baik dalam konfigurasi loop tertutup dan loop terbuka. Offset elemen Hall indium antimonide (InSb) berkualitas biasanya ±7 mV.
Perlu disebutkan bahwa sensor arus berbasis efek Hall modern menggunakan teknik inovatif untuk mengatasi beberapa batasan di atas. Misalnya, DRV411 dari TI adalah IC pengkondisi sinyal yang dirancang untuk aplikasi penginderaan arus loop tertutup yang menggunakan teknik pemintalan arus untuk menghilangkan kesalahan offset dan drift elemen Hall. Teknik ini diilustrasikan pada Gambar 5.
Contoh lain adalah ACS720 [tautan unduhan PDF] dari Allegro yang dirancang untuk aplikasi penginderaan arus loop terbuka. ACS720 menggunakan algoritme kompensasi suhu dalam chip untuk mengoptimalkan akurasi terhadap suhu.
Untuk melihat daftar lengkap artikel saya, silakan kunjungi halaman ini.
Sensor
Abstrak Nanopartikel magnetik Fe-B, Fe-Ni-B, dan Co-B berhasil disintesis dan dimasukkan ke dalam air untuk membuat ferrofluida berair. Partikel Fe-B, Fe-Ni-B, dan Co-B merupakan nanopartikel amorf homogen dengan ukuran partikel rata-rata 15 nm. Bentuk nanopartikel amorf adalah teratur. Nanopartike
Dalam tutorial ini kita akan mempelajari apa itu Efek Hall dan bagaimana Sensor Efek Hall bekerja. Anda dapat menonton video berikut atau membaca tutorial tertulis di bawah ini. Ringkasan Efek Hall adalah metode yang paling umum untuk mengukur medan magnet dan sensor Efek Hall sangat populer dan m
Dari perangkat elektronik hingga kendaraan berefisiensi tinggi, permintaan konsumen terus meningkat untuk teknologi baterai yang lebih ringkas, ringan, dan pengisian cepat dengan kepadatan energi yang lebih tinggi. Pada saat yang sama, baterai juga harus aman, bahkan dalam peristiwa bencana. Lithium
Pikirkan skenario di mana Anda ingin mendapatkan laju aliran mesin kopi atau pipa air. Pengukuran seperti itu dimungkinkan bila Anda memiliki sensor pulsa laju aliran. Hari ini, kami akan menguraikan cara kerja sensor aliran YF-S201 dan aplikasinya. Apa itu YF-S201? Gbr 1:Sensor pengukuran alira