Merancang sistem umpan balik yang bereaksi cepat untuk desain miniatur yang digerakkan motor
Informasi rotasi motor seperti posisi, kecepatan, dan arah harus akurat untuk menghasilkan driver dan pengontrol yang tepat di berbagai aplikasi yang muncul—misalnya, pada mesin pick-and-place yang memasang komponen mikroskopis di papan sirkuit cetak terbatas (PCB). Baru-baru ini, kontrol motor telah diperkecil, memungkinkan aplikasi baru dalam robotika bedah untuk perawatan kesehatan dan drone untuk kedirgantaraan dan pertahanan. Pengendali motor yang lebih kecil juga memungkinkan aplikasi baru dalam instalasi industri dan komersial. Tantangan bagi desainer adalah untuk memenuhi persyaratan akurasi tinggi dari sensor umpan balik posisi dalam aplikasi kecepatan tinggi, sementara pada saat yang sama memasukkan semua komponen ke dalam ruang PCB terbatas agar pas di dalam penutup kecil, seperti lengan robot.
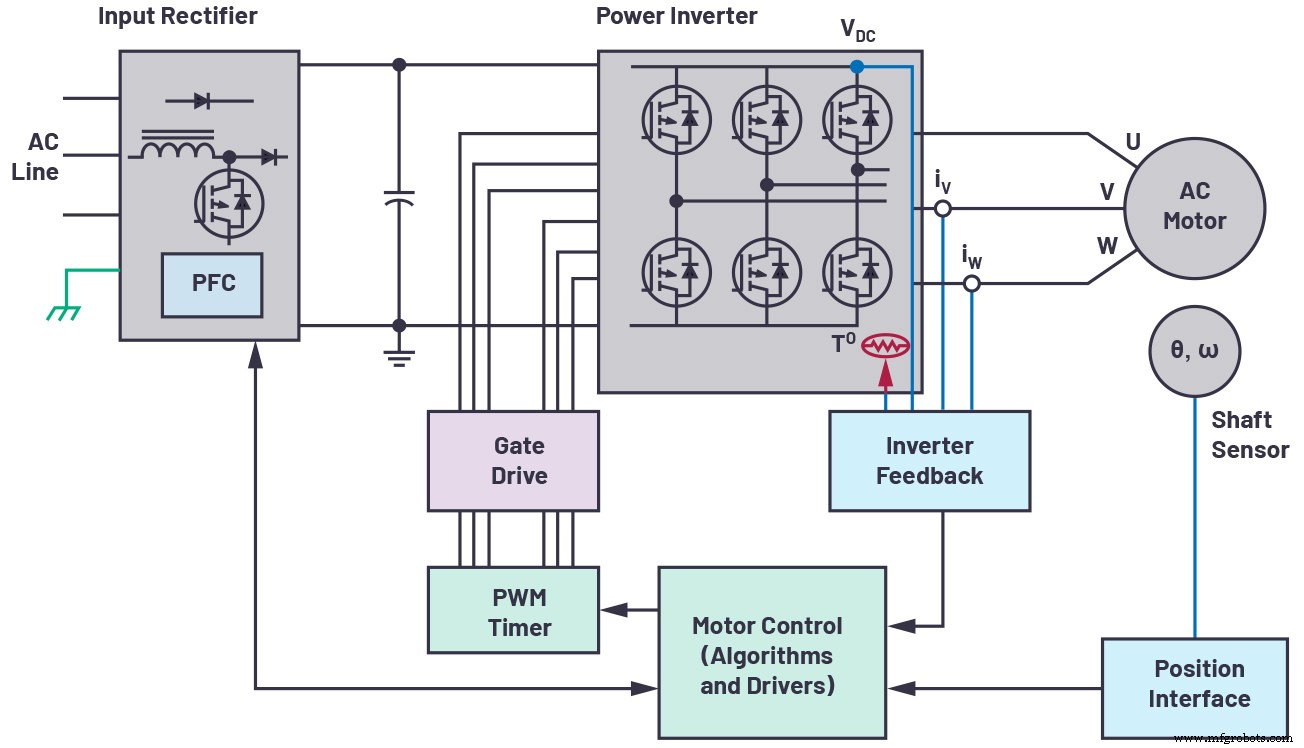
klik untuk gambar lebih besar Gambar 1. Sistem umpan balik kontrol motor loop tertutup. (Sumber:Analog Devices, Inc.)
Kontrol Motor
Loop kontrol motor, seperti terlihat pada Gambar 1, terutama terdiri dari motor, pengontrol, dan antarmuka umpan balik posisi. Motor memutar poros berputar yang menyebabkan lengan mesin bergerak sesuai. Pengontrol motor memberi tahu motor kapan harus menerapkan gaya, berhenti, atau terus berputar. Antarmuka posisi dalam loop memberikan kecepatan rotasi dan informasi posisi ke pengontrol. Data ini penting untuk pengoperasian yang benar dari mesin pick-and-place untuk perakitan PCB permukaan-mount kecil. Semua aplikasi ini memerlukan informasi pengukuran posisi yang akurat tentang objek yang berputar.
Resolusi sensor posisi harus sangat tinggi—cukup untuk mendeteksi posisi poros motor secara akurat, mengambil komponen kecil dengan benar, dan menempatkannya secara akurat di papan. Selain itu, kecepatan putaran motor yang lebih tinggi menghasilkan bandwidth loop yang lebih tinggi dan persyaratan latensi yang lebih rendah.
Sistem Umpan Balik Posisi
Dalam aplikasi ujung bawah, sensor inkremental bersama dengan komparator mungkin cukup untuk penginderaan posisi, sementara aplikasi ujung yang lebih tinggi akan membutuhkan rantai sinyal yang lebih kompleks. Sistem umpan balik ini terdiri dari sensor posisi, diikuti oleh pengkondisian sinyal front-end analog, konverter analog-ke-digital (ADC), dan drivernya sebelum data masuk ke domain digital.
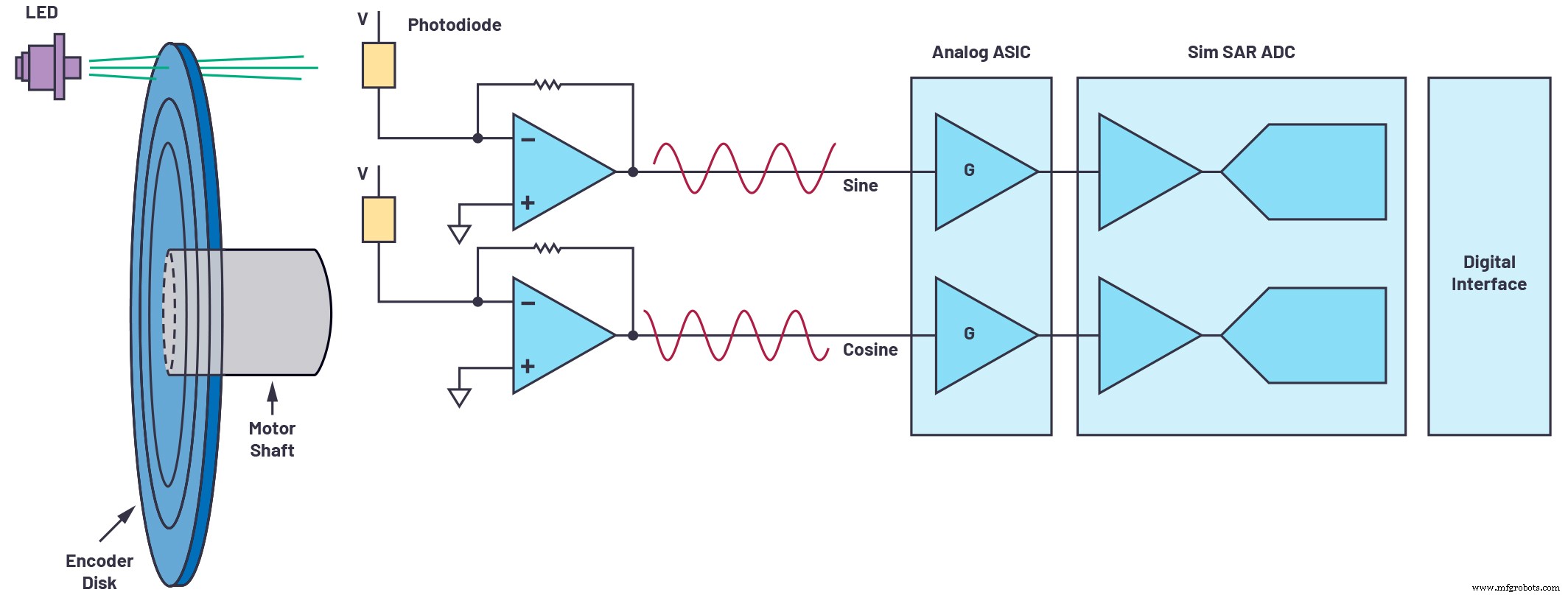
Salah satu sensor posisi yang paling tepat adalah encoder optik. Sebuah encoder optik terdiri dari sumber cahaya light emitting diode (LED), sebuah cakram bertanda yang terpasang pada poros motor, dan sebuah fotodetektor. Disk menampilkan pola area buram dan transparan yang menutupi cahaya atau membiarkannya melewatinya. Fotodetektor merasakan cahaya yang dihasilkan dan sinyal lampu hidup/mati diubah menjadi sinyal listrik.
Saat piringan berputar, fotodetektor—bersama dengan pola piringan—menghasilkan sinyal sinus dan kosinus kecil, pada level mV atau V. Sistem ini tipikal dalam encoder optik posisi absolut. Sinyal-sinyal ini diumpankan ke sirkuit pengkondisi sinyal analog, biasanya terdiri dari penguat diskrit atau penguat penguatan analog yang dapat diprogram (PGA) untuk mendapatkan sinyal hingga rentang puncak-ke-puncak 1 V—biasanya agar sesuai dengan rentang tegangan input ADC untuk rentang dinamis maksimum. Masing-masing sinyal sinus dan cosinus yang diperkuat kemudian diakuisisi oleh penguat driver ADC sampling simultan.
ADC harus menampilkan pengambilan sampel simultan pada salurannya sehingga titik data sinus dan kosinus diambil pada titik waktu yang sama persis, karena kombinasi tersebut memberikan informasi posisi poros. Hasil konversi ADC diteruskan ke sirkuit terintegrasi khusus aplikasi (ASIC) atau mikrokontroler. Kontroler motor menanyakan posisi encoder setiap siklus modulasi lebar pulsa (PWM) dan menggunakan data ini untuk menggerakkan motor berdasarkan instruksi yang diterimanya. Di masa lalu, perancang sistem harus menukar kecepatan ADC atau jumlah saluran agar sesuai dengan jejak papan yang membatasi.
klik untuk gambar lebih besar Gambar 2. Sistem umpan balik posisi. (Sumber:Analog Devices, Inc.)
Mengoptimalkan Umpan Balik Posisi
Tuntutan teknologi yang berkembang telah menghasilkan inovasi dalam aplikasi kontrol motor yang membutuhkan deteksi posisi akurasi tinggi. Resolusi encoder optik dapat didasarkan pada jumlah slot yang tertulis dari litografi halus dalam disk, biasanya ratusan atau ribuan.
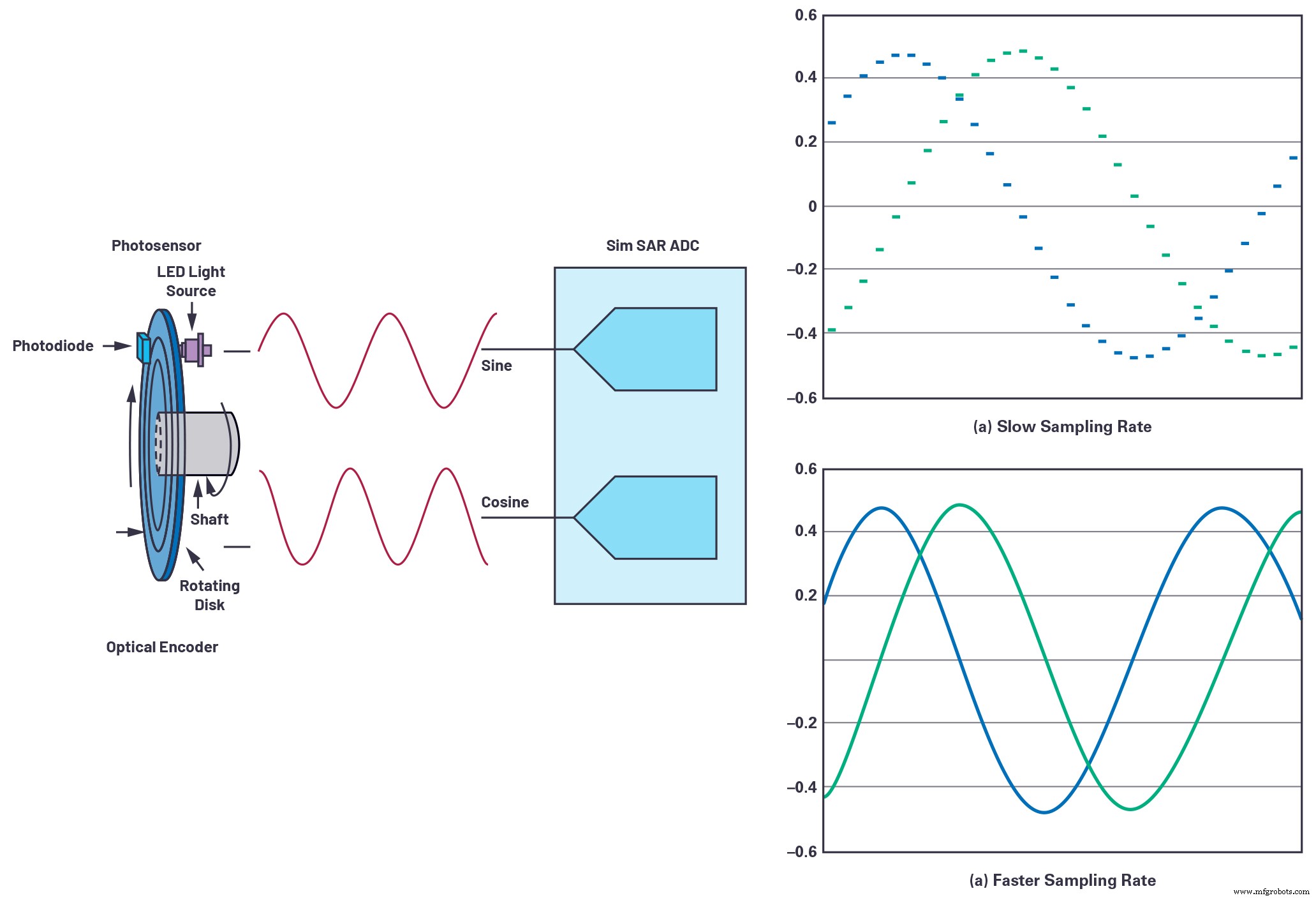
Interpolasi sinyal sinus dan cosinus ini ke kecepatan tinggi, kinerja tinggi ADC akan memungkinkan kita untuk membuat encoder resolusi lebih tinggi tanpa memerlukan perubahan sistem ke disk encoder. Misalnya, ketika sinyal sinus dan cosinus encoder diambil sampelnya pada kecepatan yang lebih lambat, lebih sedikit nilai sinyal yang ditangkap, seperti yang ditunjukkan pada Gambar 3; ini juga membatasi keakuratan batas posisi.
klik untuk gambar lebih besar Gambar 3. Tingkat pengambilan sampel. (Sumber:Analog Devices, Inc.)
Pada Gambar 3, ketika sampel ADC pada tingkat yang lebih cepat, nilai sinyal yang lebih detail ditangkap, dan posisi akurasi yang lebih tinggi ditentukan. Tingkat pengambilan sampel berkecepatan tinggi dari ADC memungkinkan oversampling, yang selanjutnya meningkatkan kinerja noise, menghilangkan beberapa kebutuhan pascapemrosesan digital. Pada saat yang sama, ini mengurangi kecepatan data keluaran dari ADC; yaitu, memungkinkan sinyal frekuensi serial yang lebih lambat, sehingga menyederhanakan antarmuka digital. Sistem umpan balik posisi motor dipasang di rakitan motor, yang bisa sangat kecil dalam aplikasi tertentu. Jadi ukuran sangat penting agar sesuai dengan area PCB terbatas dari modul encoder. Munculnya beberapa komponen saluran dalam satu paket kecil paling cocok untuk menghemat ruang.
Contoh Desain Umpan Balik Posisi Encoder Optik
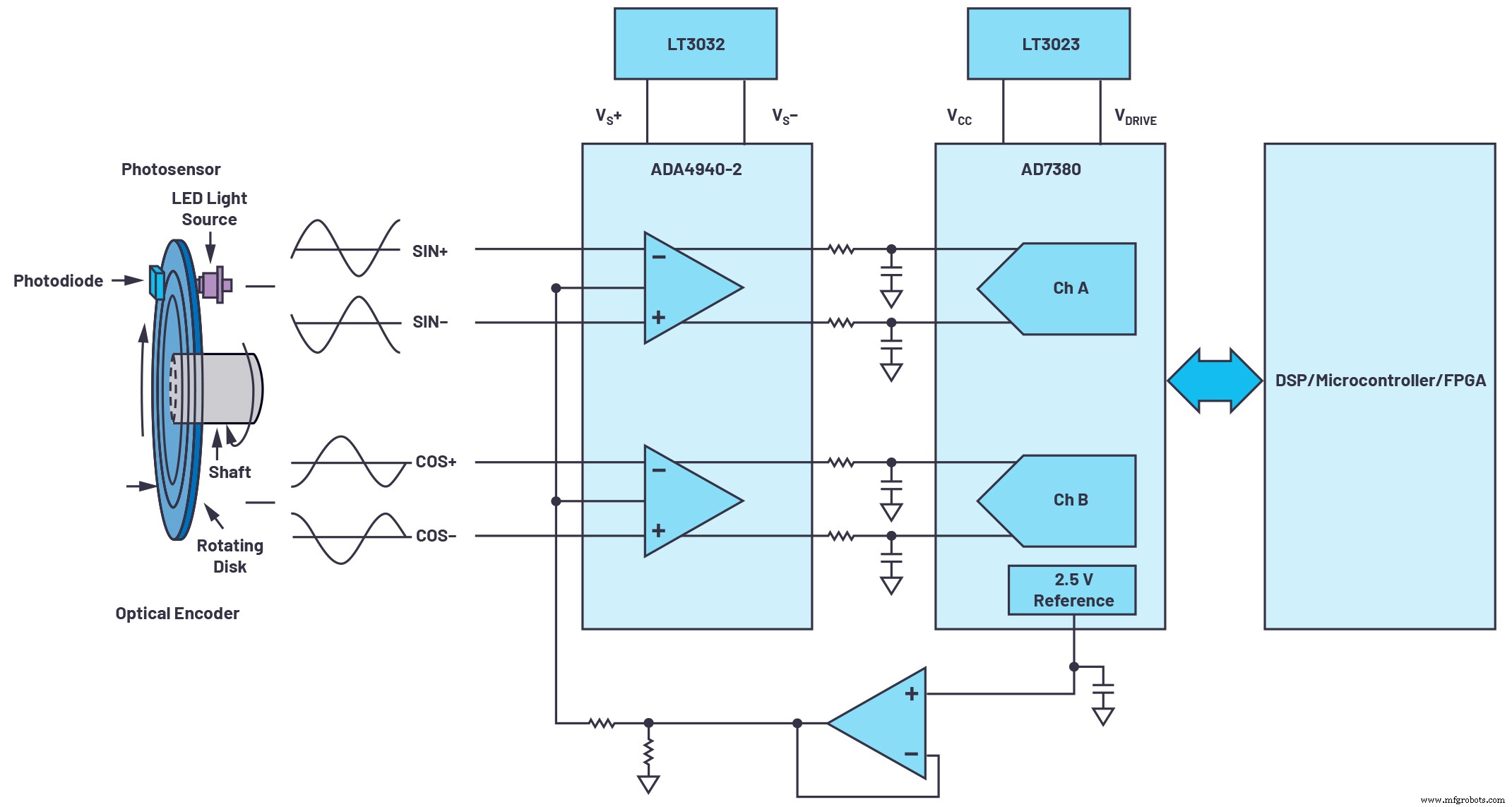
Contoh dari sistem umpan balik posisi enkoder optik yang dioptimalkan ditunjukkan pada Gambar 4. Sirkuit dapat dihubungkan ke jenis enkoder optik absolut di mana sinyal sinus dan kosinus diferensial dari enkoder dapat ditangkap oleh sirkuit. Gambar 4 menunjukkan ADA4940-2 depan-end, saluran ganda, penguat diferensial penuh yang menggerakkan ADC, dalam hal ini AD7380, saluran ganda, 16-bit, diferensial penuh, 4 MSPS, pengambilan sampel simultan SAR ADC, ditempatkan di paket LFCSP kecil 3 mm × 3 mm.
klik untuk gambar lebih besar Gambar 4. Desain sistem umpan balik yang dioptimalkan. (Sumber:Analog Devices, Inc.)
Referensi 2.5 V on-chip akan memungkinkan persyaratan komponen minimum untuk sirkuit ini. VCC dan VDRIVE dari ADC dan rel suplai driver amplifier dapat diberi daya oleh regulator LDO, seperti LT3023 dan LT3032. Ketika desain referensi ini dihubungkan—misalnya, dengan 1024-slot optical encoder yang menghasilkan 1024 siklus sinus dan cosinus dalam satu putaran encoder disc—16-bit AD7380 mengambil sampel setiap slot encoder pada 216 kode, secara keseluruhan meningkatkan encoder resolusi hingga 26 bit.
Tingkat throughput 4 MSPS memastikan bahwa siklus sinus dan kosinus yang terperinci ditangkap dan posisi encoder diperbarui. Tingkat throughput yang tinggi memungkinkan oversampling on-chip, yang mengurangi penalti waktu ASIC digital atau mikrokontroler yang memberikan posisi encoder yang tepat ke motor. Oversampling on-chip memungkinkan resolusi 2 bit tambahan, yang dapat digunakan dengan fitur peningkatan resolusi on-chip. Peningkatan resolusi dapat lebih meningkatkan akurasi hingga 28 bit.
Tuntutan sistem kontrol motor untuk akurasi yang lebih tinggi, kecepatan yang lebih tinggi, dan miniaturisasi semakin meningkat. Encoder optik digunakan sebagai perangkat penginderaan posisi motor. Untuk melakukan ini, rantai sinyal encoder optik harus memiliki tingkat akurasi yang tinggi saat mengukur posisi motor. ADC kecepatan tinggi dan throughput tinggi secara akurat menangkap informasi dan memasukkan data posisi motor ke pengontrol, memungkinkan tingkat akurasi dan pengoptimalan yang lebih tinggi dalam sistem umpan balik posisi.