Para peneliti mengembangkan ujung jari robot untuk menggenggam dan melepaskan objek dalam kondisi kering dan basah
Tim peneliti di Universitas Kanazawa telah mengembangkan sistem kontrol robot – atau ujung jari – untuk menggenggam dan melepaskan objek dalam kondisi kering dan basah.
Para peneliti mengatakan bahwa penelitian ini dapat memverifikasi bahwa “pemegang benda dengan ujung jari cairan permukaan yang lembut dengan gesekan tinggi dapat dikontrol dengan menerapkan pelumas yang sesuai”.
Namun, mereka menambahkan bahwa perlu untuk melakukan lebih banyak eksperimen dalam berbagai kondisi untuk menerapkan teknologi pengendalian saat ini ke lingkungan manufaktur.
Meskipun demikian, penelitian ini diharapkan dapat menjadi langkah maju untuk mewujudkan otomatisasi kerja, misalnya menggenggam dan melepaskan objek di ruang sempit.
Robot industri sekarang banyak digunakan dan sangat diperlukan dalam pembuatan mobil dan bidang lainnya. Tangan robot konvensional cocok untuk menggenggam benda keras dengan bentuk tetap, sedangkan tangan robot tidak mudah untuk menggenggam benda rumit atau menggenggam benda lunak dengan lembut.
Juga diperlukan, dalam berbagai kondisi, untuk menanggapi karakteristik fisik objek seperti karakteristik permukaan:kering, basah, dll.
Ujung jari tangan robot yang permukaannya lembut dapat berubah bentuk dan dapat menangkap objek dengan bentuk yang rumit dengan lebih mudah, karena area kontak dapat diperbesar dengan deformasi permukaan sebagai respons terhadap bentuk objek.
Ujung jari yang permukaannya lembut sangat efektif dalam menggenggam benda lunak; bahkan tahu pun bisa digenggam.
Namun, umumnya, gesekan permukaan bahan lunak tinggi, yang membuat pelepasan lebih sulit. Juga sulit untuk melepaskan objek ke posisi yang diinginkan, terutama dalam kasus di mana ruang kerja sempit.
Kelompok penelitian yang dipimpin oleh Profesor Tetsuyou Watanabe di Universitas Kanazawa telah melakukan penelitian tentang teknologi kontrol untuk menggenggam objek dengan ujung jari tangan robot.
Dalam penelitian ini, kelompok tersebut bertujuan untuk mengembangkan sistem kontrol gesekan.
Kelompok tersebut menggunakan ujung jari tangan robot yang lembut untuk menggenggam objek; pelepasan dilakukan dengan menerapkan (menyuntikkan) pelumas.
Dalam penelitian ini, etanol absolut (>99,5%) digunakan sebagai pelumas, karena etanol aman secara kimia dan mudah kering serta karena tegangan permukaannya rendah.
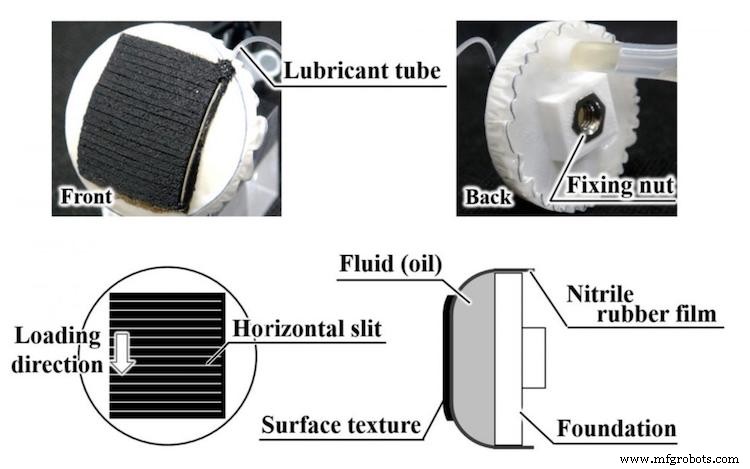
Seperti yang terlihat pada Gambar 1, lapisan karet nitril direkatkan ke sisi fondasi ujung jari untuk menciptakan ruang untuk pengisian dengan minyak gergaji rantai untuk membuat “ujung jari yang cair”.
Kemudian "tekstur" silikon direkatkan untuk melapisi film karet; bahan "tekstur" adalah sealant silikon dengan celah, yang intervalnya 1,5 mm, tegak lurus terhadap arah beban.
Celah diperkenalkan untuk gesekan besar di bawah kondisi basah air dan untuk penyebaran pelumas.
Dengan ujung jari yang cair ini, benda-benda dari berbagai bahan yang digunakan untuk peralatan dapur digenggam dan dipastikan bahwa, setelah mengoleskan pelumas, gesekannya memang berkurang.
Gesekan berkurang baik dalam kondisi kering dan basah, sedangkan efek pelumasan seperti itu tidak diamati dalam kondisi berminyak.
Selanjutnya dilakukan simulasi tugas box packing. Sebuah kotak kertas digenggam dengan dua ujung jari yang mengalir dari kedua sisi.
“Tekstur” yang dijelaskan di atas melekat pada setiap ujung jari yang cair. Genggaman yang stabil dikonfirmasi dengan meletakkan beban pada kotak kertas.
Setelah bobot dihilangkan, pelumas disuntikkan ke kedua ujung jari yang cair, yang menyebabkan kotak kertas tergelincir ke bawah dalam waktu yang agak singkat (kurang dari 2,5 detik), sehingga tugas pengemasan kotak kertas selesai.
Seperti yang ditunjukkan di sini, "tekstur" gesekan tinggi melekat pada ujung jari yang cair, dan menyuntikkan pelumas (di sini, etanol absolut) mengurangi gesekan.
Oleh karena itu, pelepasan dan penempatan suatu objek pada posisi yang diinginkan dicapai dengan mengontrol gesekan tanpa menggerakkan ujung jari.


