Selsyn (Synchro) Motors
Biasanya, belitan rotor dari motor induksi rotor belitan dikorsletingkan setelah start. Selama pengasutan, hambatan dapat ditempatkan secara seri dengan belitan rotor untuk membatasi arus pengasutan. Jika belitan ini terhubung ke resistansi awal yang sama, kedua rotor akan tetap sinkron selama memulai.
Ini berguna untuk mesin cetak dan jembatan tarik, di mana dua motor perlu disinkronkan selama start. Setelah dimulai, dan rotor korsleting, torsi sinkronisasi tidak ada. Semakin tinggi resistansi selama start, semakin tinggi torsi sinkronisasi untuk sepasang motor.
Jika resistor awal dilepas, tetapi rotor masih paralel, tidak ada torsi awal. Namun, ada torsi sinkronisasi yang substansial. Ini disebut selsyn , yang merupakan singkatan dari “self synchronous”.
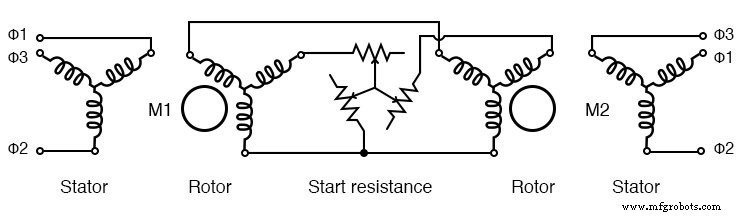
Memulai motor induksi rotor belitan dari resistor biasa
Rotor mungkin stasioner. Jika satu rotor digerakkan melalui sudut , poros selsyn lainnya akan bergerak melalui sudut . Jika tarikan diterapkan ke satu selsyn, ini akan terasa saat mencoba memutar poros lainnya.
Sementara selsyn multi-tenaga kuda (multi-kilowatt) ada, aplikasi utamanya adalah unit kecil beberapa watt untuk aplikasi instrumentasi– indikasi posisi jarak jauh.
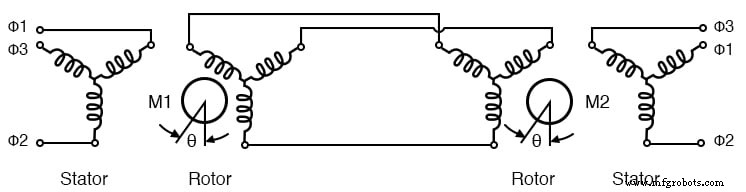
Selsin tanpa memulai resistensi
Selsyn instrumentasi tidak digunakan untuk memulai resistor (gambar di atas). Mereka tidak dimaksudkan untuk berputar sendiri. Karena rotor tidak korslet atau resistor dimuat, tidak ada torsi awal yang dikembangkan.
Namun, rotasi manual satu poros akan menghasilkan ketidakseimbangan pada arus rotor sampai poros unit paralel mengikuti. Perhatikan bahwa sumber daya tiga fasa yang sama diterapkan pada kedua stator. Meskipun kami menunjukkan rotor tiga fase di atas, rotor bertenaga satu fase sudah cukup seperti yang ditunjukkan pada gambar di bawah.
Pemancar - Penerima
Selsyn instrumentasi kecil, juga dikenal sebagai sinkronisasi , menggunakan satu fase paralel, rotor berenergi AC, mempertahankan stator paralel 3 fase, yang tidak diberi energi eksternal. Di bawah ini adalah fungsi sinkron sebagai trafo putar.
Jika rotor dari kedua pemancar torsi (TX) dan penerima torsi (RX) berada pada sudut yang sama, fase tegangan stator yang diinduksi akan sama untuk keduanya, dan tidak ada arus yang mengalir.
Jika satu rotor dipindahkan dari yang lain, tegangan fase stator akan berbeda antara pemancar dan penerima. Arus stator akan mengalir mengembangkan torsi. Poros penerima secara elektrik bekerja pada poros pemancar. Baik poros pemancar atau penerima dapat diputar untuk memutar unit yang berlawanan.
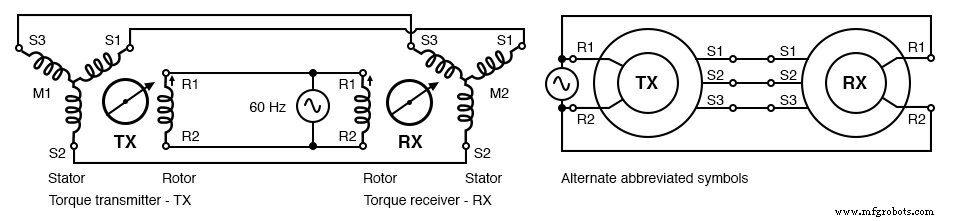
Sinkronisasi memiliki rotor bertenaga satu fase
Stator sinkron dililit dengan belitan 3 fase yang dibawa ke terminal eksternal. Gulungan rotor tunggal dari pemancar atau penerima torsi dibawa keluar oleh cincin slip yang disikat. Pemancar dan penerima sinkronisasi secara elektrik identik.
Namun, penerima sinkronisasi memiliki peredam inersia bawaan. Pemancar torsi sinkronisasi dapat menggantikan penerima torsi.
Penginderaan posisi jarak jauh adalah aplikasi sinkronisasi utama. Misalnya, pemancar sinkronisasi yang digabungkan ke antena radar menunjukkan posisi antena pada indikator di ruang kontrol.
Pemancar sinkronisasi yang digabungkan ke baling-baling cuaca menunjukkan arah angin di konsol jarak jauh. Sinkronisasi tersedia untuk digunakan dengan daya 240 Vac 50 Hz, 115 Vac 60 Hz, 115 Vac 400 Hz, dan 26 Vac 400 Hz.
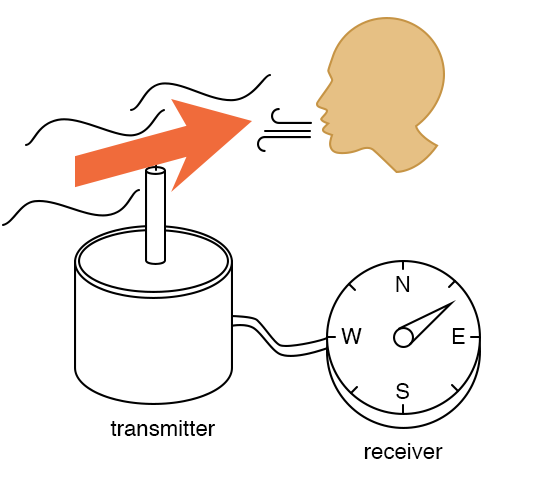
Aplikasi sinkronisasi:indikasi posisi jarak jauh
Pemancar-penerima diferensial
Pemancar diferensial sinkronisasi (TDX) memiliki rotor dan stator tiga fasa. Pemancar diferensial sinkron menambahkan input sudut poros ke input sudut elektrik pada input rotor, mengeluarkan jumlah pada output stator.
Sudut listrik stator ini dapat ditampilkan dengan mengirimkannya ke RX. Misalnya, penerima sinkronisasi menampilkan posisi antena radar relatif terhadap haluan kapal. Penambahan arah kompas kapal oleh pemancar diferensial sinkronisasi, menampilkan posisi antena pada RX relatif terhadap utara sebenarnya, terlepas dari arah kapal.
Membalikkan pasangan kabel stator S1-S3 antara TX dan TDX akan mengurangi posisi sudut.
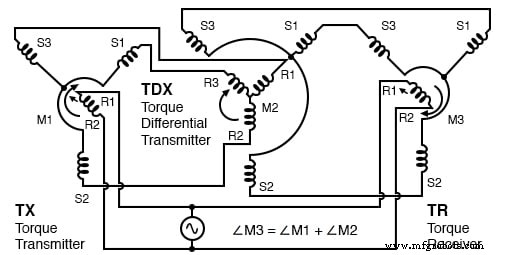
Pemancar diferensial torsi (TDX)
Antena radar kapal yang digabungkan ke pemancar sinkronisasi mengkodekan sudut antena sehubungan dengan haluan kapal (gambar di bawah). Diinginkan untuk menampilkan posisi antena sehubungan dengan utara sebenarnya.
Kita perlu menambahkan kapal yang menuju dari gyrocompass ke posisi antena relatif haluan untuk menampilkan sudut antena sehubungan dengan utara sebenarnya (∠antenna + gyro).
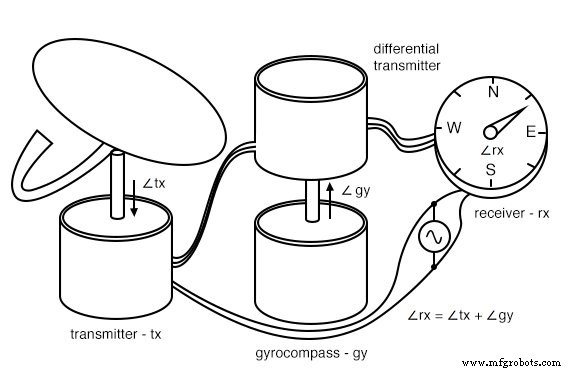
Aplikasi pemancar diferensial torsi:penambahan sudut
∠antena-N =antena + gyro rx =tx + gy
Misalnya, heading kapal adalah 30°, posisi antena relatif terhadap haluan kapal adalah 0°, antena-N adalah:
∠rx =tx + gy ∠30° =30° + 0°
Contoh, heading kapal adalah ∠30°, posisi antena relatif terhadap haluan kapal adalah 15°, antena-N adalah:
∠45° =30° + 15°
Penambahan vs Pengurangan
Untuk referensi, kami menunjukkan diagram pengkabelan untuk pengurangan dan penambahan sudut poros menggunakan TDX (Torque Differential transmitter) dan TDR (Torque Differential Receiver). TDX memiliki input sudut torsi pada poros, input sudut elektrik pada tiga sambungan stator, dan output sudut elektrik pada sambungan tiga rotor.
TDR memiliki input sudut listrik pada stator dan rotor. Output sudut adalah torsi pada poros TDR. Perbedaan antara TDX dan TDR adalah TDX adalah pemancar torsi dan TDR penerima torsi.
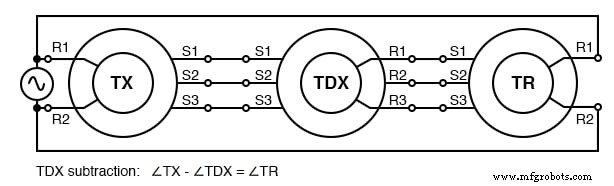
Pengurangan TDX
Input torsi adalah TX dan TDX. Perbedaan sudut keluaran torsi adalah TR.
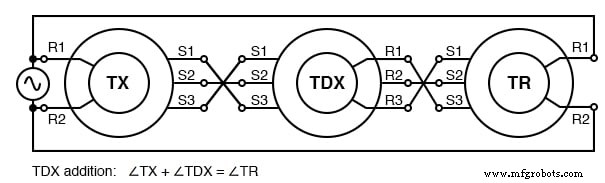
Penambahan TDX
Input torsi adalah TX dan TDX. Jumlah sudut keluaran torsi adalah TR.
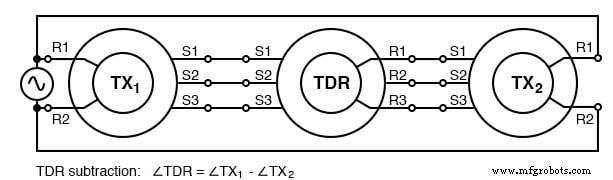
Pengurangan TDR
Masukan torsi adalah TX1 dan TX2 . Perbedaan sudut keluaran torsi adalah TDR.
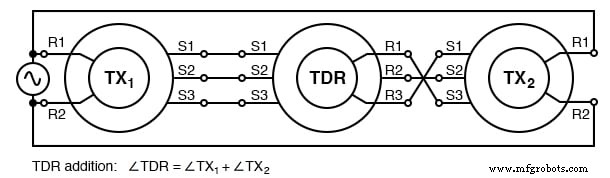
Penambahan TDR
Masukan torsi adalah TX1 dan TX2 . Jumlah sudut keluaran torsi adalah TDR.
Kontrol Transformator
Variasi dari pemancar sinkronisasi adalah trafo kontrol . Ini memiliki tiga belitan stator yang berjarak sama seperti TX. Rotornya dililit dengan lebih banyak putaran daripada pemancar atau penerima untuk membuatnya lebih sensitif dalam mendeteksi nol saat diputar, biasanya, oleh servo sistem.
Output rotor CT (Control Transformer) adalah nol ketika diorientasikan pada sudut kanan ke vektor medan magnet stator. Tidak seperti TX atau RX, CT tidak mentransmisikan atau menerima torsi. Ini hanyalah detektor posisi sudut yang sensitif.
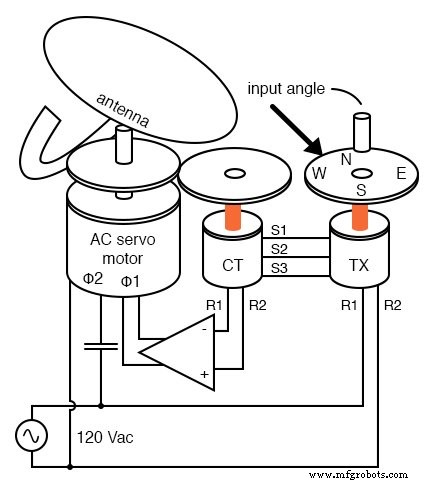
Transformator kontrol (CT) mendeteksi servo null
Pada gambar di atas, poros TX diatur ke posisi antena radar yang diinginkan. Sistem servo akan menyebabkan motor servo untuk menggerakkan antena ke posisi yang diperintahkan. CT membandingkan perintah dengan posisi sebenarnya dan memberi sinyal penguat servo untuk menggerakkan motor sampai sudut yang diperintahkan tercapai.
Servo menggunakan CT untuk mendeteksi posisi antena null
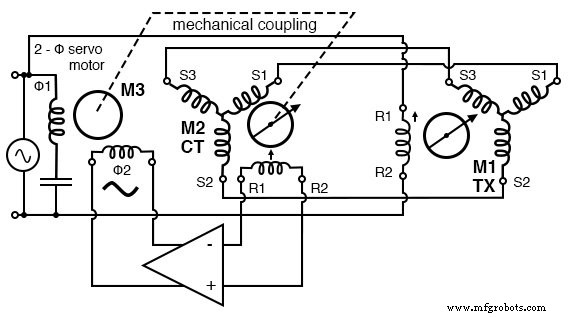
Ketika rotor transformator kontrol mendeteksi nol pada 90° terhadap sumbu medan stator, tidak ada keluaran rotor. Setiap perpindahan rotor menghasilkan tegangan kesalahan AC yang sebanding dengan perpindahan.
Sebuah servo berusaha untuk meminimalkan kesalahan antara variabel yang diperintahkan dan diukur karena umpan balik negatif. Transformator kontrol membandingkan sudut poros dengan sudut medan magnet stator, yang dikirim oleh stator TX.
Ketika mengukur minimum atau nol, servo telah menggerakkan antena dan mengendalikan rotor transformator ke posisi yang diperintahkan. Tidak ada kesalahan antara posisi yang diukur dan yang diperintahkan, tidak ada output CT yang akan diperkuat.
motor servo , motor 2 fase, berhenti berputar. Namun, setiap kesalahan CT yang terdeteksi menggerakkan amplifier yang menggerakkan motor sampai kesalahan diminimalkan. Ini sesuai dengan sistem servo yang telah menggerakkan CT yang digabungkan antena agar sesuai dengan sudut yang diperintahkan oleh TX.
Motor servo dapat menggerakkan rangkaian roda gigi reduksi dan berukuran besar dibandingkan dengan sinkronisasi TX dan CT. Namun, efisiensi yang buruk dari motor servo AC membatasinya pada beban yang lebih kecil. Mereka juga sulit dikendalikan karena merupakan perangkat kecepatan konstan.
Namun, mereka dapat dikontrol sampai batas tertentu dengan memvariasikan tegangan ke satu fase dengan tegangan saluran pada fase lainnya. Beban berat lebih efisien digerakkan oleh motor servo DC besar.
Aplikasi di udara menggunakan komponen 400Hz– TX, CT, dan motor servo. Ukuran dan berat komponen magnet AC berbanding terbalik dengan frekuensi. Oleh karena itu, penggunaan komponen 400 Hz untuk aplikasi pesawat, seperti permukaan kontrol bergerak, menghemat ukuran dan berat.
Pemecah masalah
Seorang penyelesai (gambar di bawah) memiliki dua belitan stator yang ditempatkan pada 90° satu sama lain, dan belitan rotor tunggal digerakkan oleh arus bolak-balik. Resolver digunakan untuk konversi kutub ke persegi panjang. Masukan sudut pada poros rotor menghasilkan koordinat persegi panjang tegangan proporsional sinθ dan cosθ pada belitan stator.
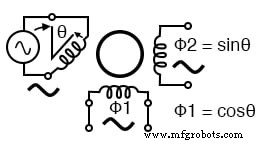
Resolver mengubah sudut poros menjadi sinus dan kosinus sudut
Misalnya, kotak hitam di dalam radar mengkodekan jarak ke target sebagai tegangan proporsional gelombang sinus V, dengan sudut bantalan sebagai sudut poros. Ubah ke koordinat X dan Y. Gelombang sinus diumpankan ke rotor resolver. Poros sudut bantalan digabungkan ke poros resolver. Koordinat (X, Y) tersedia pada kumparan stator penyelesai:
X=V(cos(∠bearing)) Y=V(sin(∠bearing))
Koordinat Cartesian (X, Y) dapat diplot pada tampilan peta. Sebuah TX (pemancar torsi) dapat disesuaikan untuk layanan sebagai resolver.

Scott-T mengonversi 3-φ menjadi 2-φ yang memungkinkan TX menjalankan fungsi resolver
Dimungkinkan untuk memperoleh komponen sudut kuadratur seperti resolver dari pemancar sinkronisasi dengan menggunakan Scott-T transformator. Tiga keluaran TX, 3-fase, diproses oleh Scott-T transformator menjadi sepasang komponen kuadratur. Ada juga versi linier dari resolver yang dikenal sebagai inductosyn. Versi putar dari inductosyn memiliki resolusi yang lebih baik daripada resolver.
Ringkasan:Motor Selsyn (sinkron)
- Sebuah sinkronisasi , juga dikenal sebagai selsyn , adalah trafo putar yang digunakan untuk mengirimkan torsi poros.
- Sebuah TX, pemancar torsi , menerima masukan torsi pada porosnya untuk transmisi pada keluaran listrik tiga fase.
- Sebuah RX, penerima torsi , menerima representasi listrik tiga fase dari input sudut untuk konversi ke output torsi pada porosnya. Dengan demikian, TX mentransmisikan torsi dari poros input ke poros output RX jarak jauh.
- TDX, pemancar diferensial torsi , menjumlahkan input sudut elektrik dengan input sudut poros menghasilkan output sudut elektrik
- TDR, penerima diferensial torsi, menjumlahkan dua input sudut elektrik yang menghasilkan output sudut poros
- CT, trafo kontrol , mendeteksi nol ketika rotor diposisikan pada sudut kanan ke input sudut stator. CT biasanya merupakan komponen dari sistem umpan balik servo.
- Sebuah penyelesai mengeluarkan representasi kuadratur sin(θ) dan cos(θ) dari input sudut poros alih-alih output tiga fase.
- Output tiga fase TX diubah menjadi output gaya resolver oleh trafo Scott-T .


