Bagaimana Cara Kerja Time of Flight Sensors (ToF)? Sekilas tentang Kamera 3D ToF
Bagaimana sensor waktu penerbangan menentukan jarak? Pelajari lebih lanjut tentang kamera ToF menggunakan contoh kamera 3D.
Bagaimana waktu sensor penerbangan menentukan jarak? Pelajari lebih lanjut tentang kamera ToF menggunakan contoh kamera 3D.
Ada tiga teknologi pencitraan 3D terkemuka yang bersaing memperebutkan ruang di ponsel dan mobil Anda. Teknologi tersebut adalah pencitraan stereoskopik, proyeksi cahaya terstruktur, dan kamera time-of-flight (atau ToF). Data yang dihasilkan perangkat ini dapat menyediakan deteksi pejalan kaki, mengautentikasi pengguna berdasarkan fitur wajah, mendeteksi gerakan tangan, dan memasukkan algoritme SLAM (pelokalan dan pemetaan simultan).
Dua pemain terbesar di ruang ini adalah ams dan Infineon. Pada saat penulisan, ams membawa salah satu dari setiap jenis sensor dan Infineon hanya berfokus pada sensor waktu terbang.
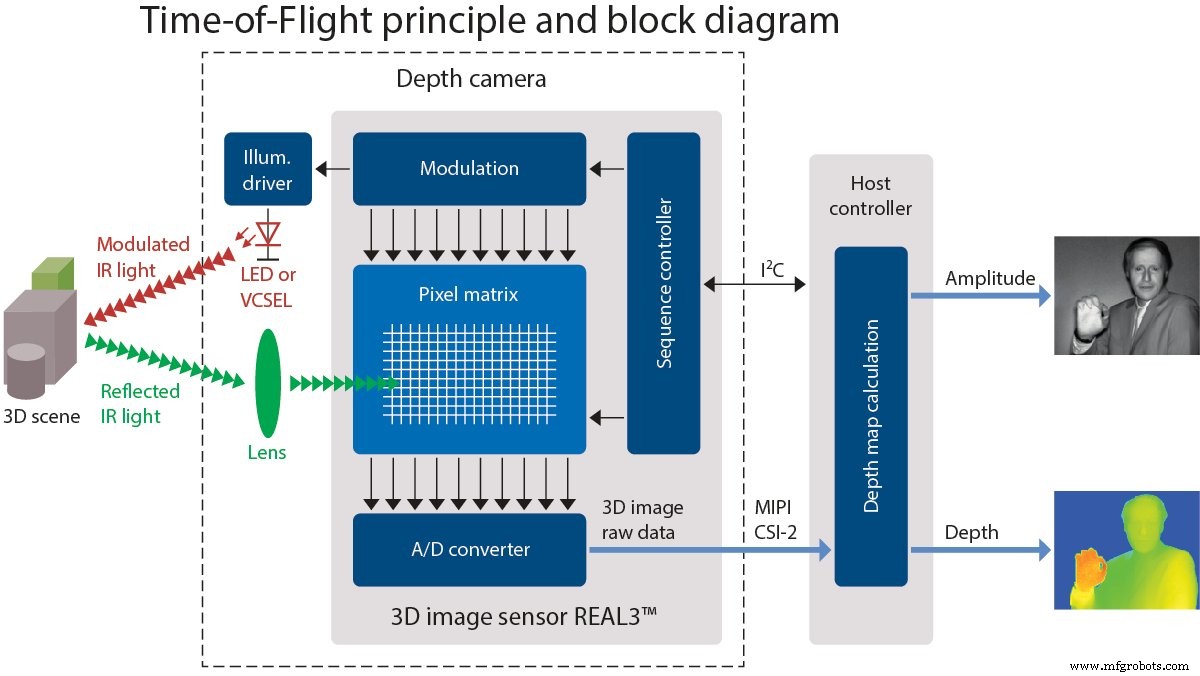
Artikel ini menjelaskan teknologi di balik sensor waktu penerbangan dengan berfokus pada kit pengembangan kamera 3D "pico flexx" dari pmdtechnologies. (Sebelum Anda bertanya, baik "pico flexx" dan "pmdtechnologies" disajikan sebagai huruf kecil semua di situs web mereka.).
Pico flexx dibangun di sekitar sensor gambar 3D yang dikembangkan bersama REAL3 dari Infineon dan pmd.
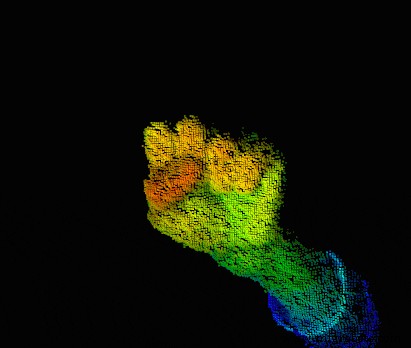
Gambar 3D berwarna palsu dari tangan yang diambil dari pmdtec.com pada 29 April 2019. Warna dipetakan ke piksel individual berdasarkan jarak dari sensor ke tangan (merah itu dekat, biru itu jauh)
Harap dicatat bahwa pmd menyediakan perangkat kepada kami untuk artikel ini.
Berapa Waktu Sensor Penerbangan?
Time of flight sensor mengukur waktu yang dibutuhkan sesuatu untuk menempuh jarak melalui media. Biasanya, ini adalah pengukuran waktu yang berlalu antara emisi pulsa gelombang, pantulannya dari suatu objek, dan kembalinya ke sensor ToF. Kamera waktu terbang adalah perangkat yang menggunakan pengukuran ToF untuk menentukan jarak antara kamera dan objek atau lingkungan, menciptakan gambar yang dihasilkan oleh titik-titik yang diukur secara individual.
Aplikasi kamera ToF mencakup sistem pencitraan LiDAR tanpa pemindai berbasis laser, pendeteksian gerakan dan pelacakan, deteksi objek untuk penglihatan alat berat dan pengemudian otonom, pemetaan topografi, dan banyak lagi.
Tapi bagaimana pengukuran ini dicapai?
Di bawah ini, saya telah menunjukkan tiga cara menggunakan waktu tempuh untuk menentukan jarak.
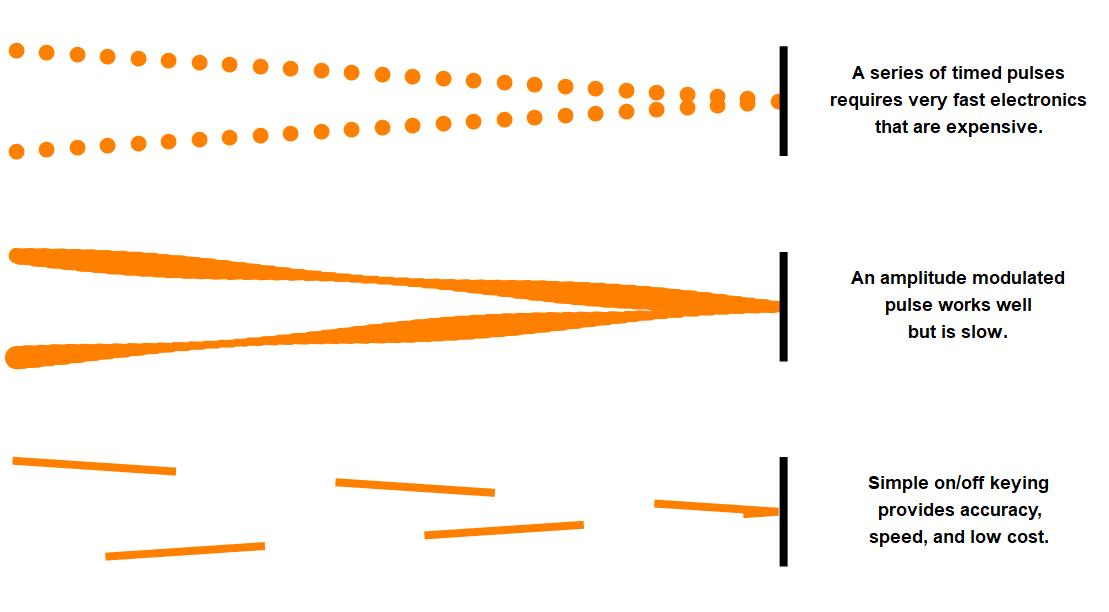
Metode penggunaan waktu tempuh untuk menentukan jarak
Di bagian atas gambar, Anda dapat melihat metode pertama, yaitu mengirim pulsa dan mengukur interval waktu hingga kembali setelah refleksi.
Bagian tengah gambar menunjukkan metode kedua, di mana Anda dapat memodulasi amplitudo sumber cahaya dan merekam pergeseran fase gelombang yang dipantulkan.
Bagian bawah gambar mewakili metode ketiga, mentransmisikan gelombang persegi siklus kerja 50% dan mencatat jumlah cahaya yang kembali yang tiba dalam interval tertentu.
Kamera ToF Presisi Tingkat Milimeter
Cahaya dan gelombang radio bergerak dengan kecepatan hampir 300.000.000.000 mm/s, yang berarti ~3,3 ps untuk gelombang yang merambat 1 mm (dan 3,3 ps lagi untuk kembali). Itu berarti, jika Anda menginginkan perangkat yang dapat mencitrakan semua objek di ruangan tempat Anda berada dan menginginkan resolusi ~ 1 mm, elektronik pengatur waktu Anda memerlukan resolusi picosecond. Itu berarti kecepatan clock ratusan GHz.
Tidak mudah dan juga tidak ekonomis untuk merancang sirkuit elektronik yang beroperasi pada frekuensi tersebut, sehingga desainer harus menemukan cara untuk bekerja pada frekuensi yang lebih rendah jika mereka berharap dapat membawa perangkat yang terjangkau ke ruang konsumen.
Ada dua metode umum untuk mencapai presisi tingkat milimeter saat bekerja dengan frekuensi sub-GHz yang wajar:
- Menghubungkan pergeseran fasa gelombang termodulasi sinusoidal dengan jarak
- Menggunakan pergeseran fase gelombang persegi siklus tugas 50% dan tegangan diferensial untuk menentukan jarak
Pada bagian di bawah ini, kita akan melihat kedua metode ini secara lebih mendetail.
Menentukan Jarak dengan Pergeseran Fase dari Gelombang Termodulasi Amplitudo
Katakanlah Anda ingin memetakan kantor kecil atau ruang tamu besar dengan dimensi panjang maksimum 15 m. Untuk menentukan frekuensi operasi yang sesuai untuk panjang tersebut, gunakan $$c=\lambda \cdot f$$ di mana c adalah kecepatan cahaya (c=3x10
8
m/s), adalah satu panjang gelombang (λ=15 m), dan adalah frekuensinya. Dalam contoh ini, =20 MHz, yang merupakan frekuensi yang relatif mudah digunakan.
Semuanya dimulai ketika cahaya terang memiliki output yang dimodulasi dengan sinyal sinusoidal 20 MHz. Gelombang cahaya akhirnya akan mencapai objek atau dinding dan akan memantulkan dan membalikkan arah. Versi redup dari cahaya termodulasi asli akan kembali ke penerima. Kecuali jika objek tersebut tepat merupakan kelipatan bilangan bulat yang berjarak 15 meter, fase akan digeser dengan jumlah tertentu.
Pergeseran fase dapat digunakan untuk menghitung jarak yang ditempuh gelombang.
Jika Anda dapat mengukur sudut fase secara akurat, Anda dapat secara akurat menentukan jarak objek pantulan dari sensor/penerima.
Cara Mengukur Sudut Fasa Sinusoid
Jadi, bagaimana Anda dengan cepat mengukur sudut fase sinusoidal? Itu melibatkan pengukuran amplitudo sinyal yang diterima pada empat titik dengan jarak yang sama (yaitu, pemisahan 90° atau 1/4 ).
$$\varphi=ArcTan \left ( \frac{A_1-A_3}{A_2-A_4} \right )$$
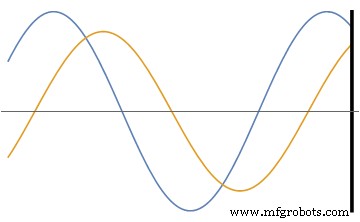
Saya telah mencoba untuk menggambarkan hubungan antara pengukuran dan sudut fase di bawah ini. Rasio selisih antara A1 dan A3 dan perbedaan antara A2 dan A4 sama dengan tangen sudut fase. ArcTan sebenarnya adalah dua argumen fungsi arc-tangent yang memetakan kuadran yang sesuai dan mendefinisikan kapan A2 =A4 dan A1>A3 atau A3>A1 masing-masing sebagai 0° atau 180°.
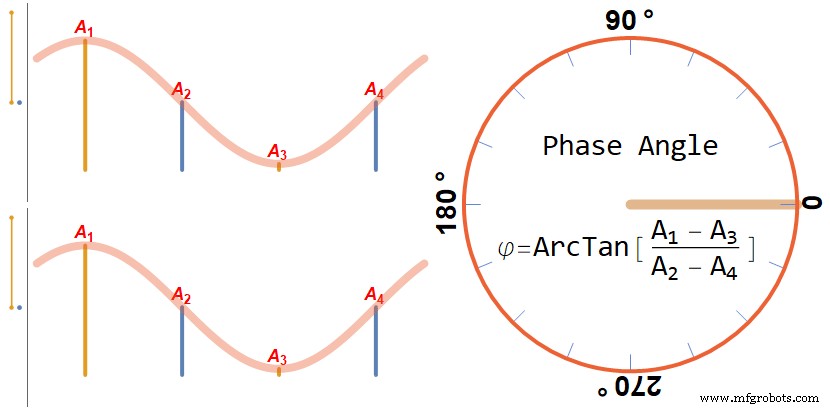
Klik pada diagram untuk melihat gambar yang lebih rumit yang menggambarkan bagaimana perbedaan variabel A1 , A2 , A3 , dan A4 sesuai dengan lingkaran satuan.
Pada ilustrasi di atas, paling kiri grafik memiliki dua garis bilangan vertikal yang menunjukkan hasil pengurangan A1 dan A3 (diwakili sebagai kuning tua) dan A2 dan A4 (diwakili sebagai biru). Nilai terukur ditampilkan sebagai garis vertikal pada grafik sinusoidal di tengah.
Perhatikan bahwa grafik ini tidak memperhitungkan refleksi (yang secara efektif akan mengubah segalanya 180°).
Menentukan Frekuensi Operasi untuk Jarak Tertentu
Kembali ke contoh kita, jarak ke target ditentukan dengan persamaan:
$$d=\frac{c \cdot \varphi}{4 \pi \cdot f}$$
Dimana c adalah kecepatan cahaya, phi (φ) adalah sudut fase (dalam radian), dan adalah frekuensi modulasi.
Mengukur waktu terbang sebenarnya dari sebuah foton membutuhkan elektronik 333 GHz. Metode ini membutuhkan frekuensi modulasi maksimal 4x, yang dalam hal ini adalah 4x20 MHz=80 MHz. Ini adalah pengurangan sumber daya yang fenomenal. Namun Anda akan senang mengetahui bahwa beberapa insinyur yang cerdas menemukan cara untuk mengurangi frekuensi maksimum lebih jauh lagi.
Menentukan Pergeseran Fasa melalui Pengukuran Tegangan Diferensial dari Kapasitor Bermuatan
Situasi pengukuran berikutnya melibatkan sumber cahaya stroboskopik dan sensor pencitraan CMOS dengan dua kapasitor per piksel.
Sumber jam menghasilkan gelombang persegi siklus kerja 50% dan gelombang persegi tersebut mengontrol sumber cahaya yang menyala terang, serta koneksi ke kapasitor penyimpanan muatan di dalam setiap piksel.
Contoh sistem seperti itu ditunjukkan pada gambar di bawah ini:
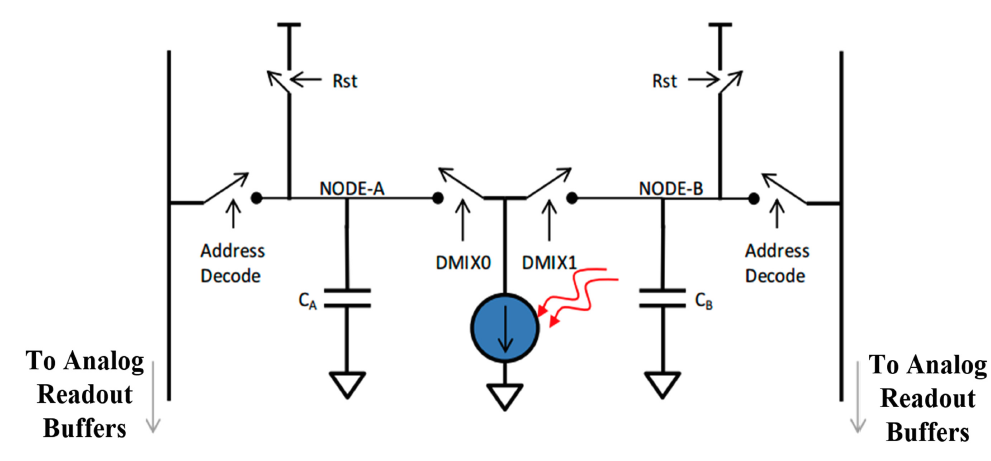
Gambar dari “Metode Kalibrasi Cepat untuk Perangkat Fotonik Mixer Solid-State Array LiDARS” Ini menunjukkan piksel CMOS dengan dua kapasitor penyimpanan muatan yang terhubung secara bergantian untuk merekam data masuk ringan.
Cahaya meninggalkan sumbernya, memantul dari suatu objek, dan mengenai piksel yang akan direkam sebagai muatan dalam kapasitor CA atau CB ditunjukkan di atas. Kapasitor dihubungkan secara bergantian ke piksel pada frekuensi yang sama dengan sumber penerangan, menggunakan sumber jam yang sama.
Susunan pintar ini berarti bahwa muatan diferensial dalam kapasitor berhubungan langsung dengan offset fasa. Dan fase ditentukan oleh panjang gelombang dan jarak ke target dan kembali.
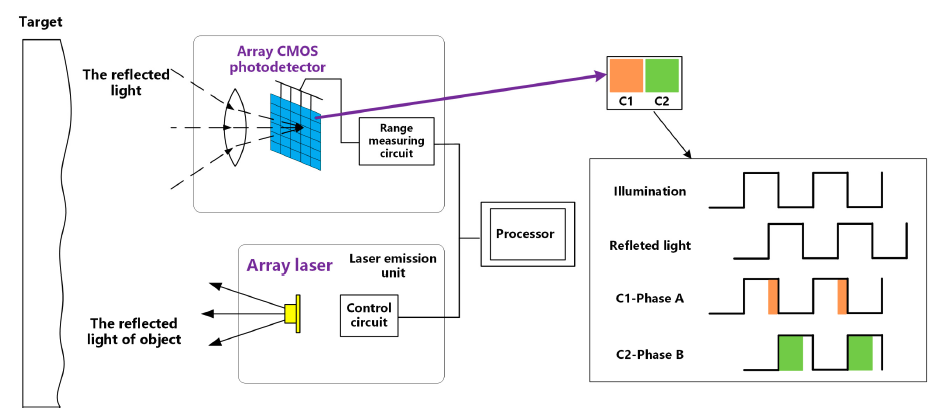
Gambar dari “Metode Kalibrasi Cepat untuk Perangkat Pencampur Fotonik Solid-State Array LiDARS”
Subjek dapat disinari sebanyak siklus yang diperlukan untuk mengisi kapasitor. Selama jaraknya konstan, proporsi muatan akan tetap sama
Waktu Sensor Penerbangan Beraksi
Seberapa baik metode ini bekerja? Lebih baik dari yang Anda harapkan.
Sensor yang disediakan untuk AAC, dikombinasikan dengan perangkat lunak yang menyertainya, memiliki kemampuan untuk merekam hingga 45 fps. Pada kecepatan refresh yang lebih rendah, sistem dapat dengan mudah menggambarkan kerutan pada kemeja.

Gambar di atas memplot lokasi titik (x,y,z) dari setiap piksel yang diambil dari kamera pico flexx pmd.
Data kedalaman saja sulit untuk divisualisasikan dengan sendirinya. Jadi gambar kedalaman sering digabungkan dengan foto, atau ditampilkan menggunakan pewarnaan palsu untuk memudahkan visualisasi pemandangan.
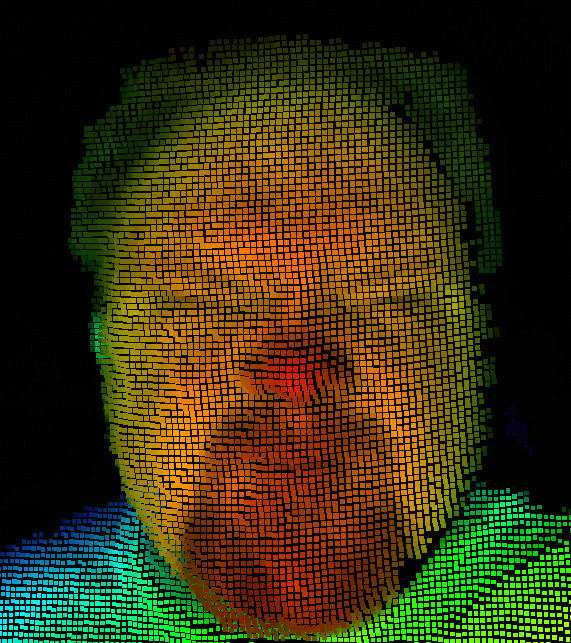
Overlay kedalaman warna palsu dari gambar resolusi rendah memudahkan untuk menafsirkan pemandangan. Gambar penulis goober ditangkap dengan software Royal Viewer pmd dan kit pengembangan 3D CamBoard pico flexx.
Sensor waktu penerbangan dapat digunakan dalam berbagai aplikasi, termasuk membuat peta lingkungan 3D saat menggabungkan fisika pintar dengan teknik.
Pernahkah Anda menggunakan kamera 3D dalam pekerjaan Anda? Apa yang dapat Anda ceritakan tentang batasan desain penggunaan sensor waktu terbang? Bagikan pengalaman Anda di komentar di bawah.


