Deteksi Kendaraan Udara Tak Berawak Menggunakan Computer Vision
Abstrak
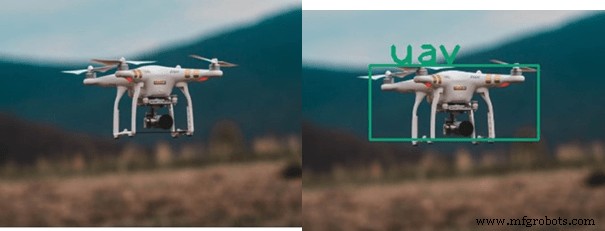
Dengan inovasi teknologi, keamanan menjadi masalah terbesar yang harus ditangani. Aksesibilitas drone yang meningkat secara eksponensial telah menjadi ancaman besar bagi keamanan umum. Penggunaan UAV meningkat dalam beberapa tahun terakhir. Mengingat masalah keamanan di sini solusi disarankan. Pertama, deteksi UAV lalu lacak jalurnya.
Untuk deteksi objek, algoritma pembelajaran mendalam Computer Vision sangat efektif. Masukan diproses oleh YOLO yang merupakan jaringan saraf yang digunakan untuk deteksi dan pelacakan objek waktu nyata.
2.1 Memahami Konsep UAV
Sesuai judul “Deteksi dan pelacakan UAV menggunakan computer vision”, UAV (kendaraan udara tak berawak) adalah pesawat tanpa pilot, yang dapat dikendalikan dari jarak jauh atau komputer onboard. 
UAV dapat digunakan untuk tujuan yang bermanfaat seperti pertanian, penelitian ilmiah, prakiraan cuaca, pengiriman dan pengiriman, operasi penyelamatan, dan perawatan kesehatan. Ini dapat digunakan untuk tujuan bencana seperti menyerang, serangan rudal, membunuh target, dll.
2.2 Apa itu Visi Komputer?
Penglihatan komputer adalah bidang ilmu yang membuat komputer melihat, mengidentifikasi, dan memproses gambar seperti yang dilakukan penglihatan mata manusia dan untuk memberikan keluaran yang tepat. Visi komputer digunakan di hampir setiap bidang yaitu:
- Objek, deteksi wajah
- Bedah robotik dan diagnosis medis
- Pemrosesan gambar
- Pertanian
- Teknologi luar angkasa (NASA Mars Rover mencakup kemampuan untuk memodelkan medan planet, mendeteksi rintangan di jalurnya, dan menyatukan gambar panorama) Aplikasi visi komputer ditunjukkan pada gambar 1.4
2.3 Apa itu Teknik Pemrosesan Gambar?
The Pemrosesan Gambar teknik yang digunakan oleh Computer vision untuk melakukan tugas yang berbeda. Operasi yang dilakukan dan metode yang diterapkan untuk meningkatkan kualitas gambar atau untuk mendapatkan hasil tertentu setelah diperoleh sebagai tumpukan gambar disebut sebagai pemrosesan gambar.
Pemrosesan gambar dianggap sebagai salah satu bidang teknologi informasi yang berkembang pesat saat ini, dengan aplikasi yang berkembang di semua bidang bisnis. Aplikasi pengolahan citra adalah:
Kasus Penggunaan Pemrosesan Gambar
Pemrosesan gambar dapat digunakan di bidang berikut:
- Anaconda
- Spyder
- Python
- Perpustakaan CV Terbuka
3. Algoritma untuk Deteksi Objek
Banyak algoritma yang hadir untuk deteksi objek. Beberapa di antaranya adalah sebagai berikut:
- VOILA DAN JONES
- Jaringan Saraf Konvolusi (CNN)
- Anda Hanya Melihat Sekali (YOLO)
- Detektor Tembakan Tunggal (SSD)
- Jaringan Saraf Konvolusi Wilayah (R-CNN)
Tabel 3.1:Algoritma untuk deteksi
| Algoritma | Deskripsi | Kekuatan | Kelemahan |
| VOILA AND JONES (The Viola-Jones
Algoritma dirancang oleh Paul Viola dan Michael Jones pada tahun 2001) | Tujuan utamanya adalah deteksi wajah dan objek. Itu dapat mendeteksi objek secara real time.
Ketika kami memberikan gambar, algoritma melihat subregion yang lebih kecil dan mencoba menemukan objek dengan melihat fitur khusus di setiap subregion.
Algoritma Viola dan Jones menggunakan fitur seperti Haar untuk mendeteksi objek | - Kuat
- Tingkat deteksi sangat tinggi.
- Gunakan pengklasifikasi yang berbeda untuk melihat bagian gambar yang berbeda
- Cepat
- Bagus dalam mendeteksi tepi dan garis
| - Tidak dapat mendeteksi wajah yang dimiringkan atau diputar.
- Ini sensitif terhadap kondisi pencahayaan
- Tidak dapat mendeteksi objek bergerak
|
| CNN (Convolutional Neural Networks) Diperkenalkan oleh Kunihiko Fukushima pada tahun 1980 | Model hierarki yang terinspirasi secara biologis yang dapat dilatih untuk melakukan deteksi, pengenalan, dan segmentasi yang benar.
Ini pada dasarnya adalah algoritme pembelajaran mendalam, mengambil gambar sebagai input, memberikan bobot dan bias yang dapat dipelajari ke objek yang ada dalam gambar dan membedakan antara satu dan lainnya | - Tentukan fitur berdasarkan pelatihan (sehingga memiliki tingkat kebebasan yang lebih tinggi).
- Gunakan klasifikasi tunggal yang melihat gambar penuh.
- Menerapkan operasi matriks.
- Akurat.
| - Set data besar diperlukan
- Mahal.
|
| YOLO (Anda Hanya Melihat Sekali) | Ini adalah algoritma deteksi waktu nyata. Ini menerapkan algoritme jaringan saraf ke gambar, dan membagi gambar ke kisi S x S dan membuat batas di sekitar gambar dan memprediksi kemungkinan untuk setiap batas. Ini menggunakan regresi. | - Dapat mendeteksi beberapa objek dalam gambar yang sama.
- Eksekusi waktu nyata
- Sangat cepat
- Kinerja tinggi
- Tidak ada kesalahan latar belakang
| 1. Mendeteksi satu objek per sel grid.
2. Mengutamakan kinerja tinggi daripada akurasi. |
| SSD (Detektor Bidikan Tunggal) | Metode ini hanya membutuhkan satu bidikan untuk mendeteksi beberapa objek. Metode ini sangat cepat. Ini dirancang untuk implementasi waktu nyata. Ini berisi dua komponen tulang punggung dan kepala SSD. | - Waktu komputasi yang lebih tinggi
- Akurasi tinggi
- Pertukaran ketepatan sedang
| - Berkinerja baik untuk objek berukuran besar tetapi sedikit menurun untuk objek berukuran kecil
- Deteksi ujung ke ujung, terlalu lambat.
- Secara komputasi mahal.
|
Di sini algoritma jaringan saraf Yolo akan digunakan. Algoritma ini sangat cepat untuk implementasi real-time. Ini menggunakan algoritma jaringan saraf dan membagi gambar menjadi kisi S x S dan membuat batas di sekitar gambar untuk memprediksi kemungkinan untuk setiap batas. Algoritma untuk deteksi ditunjukkan pada Tabel 4.4.
3.1 Algoritma untuk Pelacakan
Setelah mendeteksi objek, fokus berikutnya adalah pada jalurnya. Jika objek yang terdeteksi adalah layang-layang atau burung tidak perlu dilacak tetapi jika objek yang terdeteksi adalah drone maka targetnya terlacak.
Banyak algoritma yang digunakan untuk pelacakan objek. Namun sekali lagi YOLO digunakan untuk pelacakan karena algoritme ini cepat dan akurat serta dapat mendeteksi dan melacak hingga target bergerak di luar jangkauan kamera.
4. Implementasi Desain yang Diusulkan
Berikut adalah implementasi dari desain yang diusulkan. Di mana semua langkah yang diperlukan untuk menjalankan proyek pada perangkat lunak dilakukan.
4.1 Tahap Awal
- Pemrosesan gambar membutuhkan CPU/GPU yang baik, pilih CPU. Instal anaconda dari situs web Instalasi Anaconda ditunjukkan pada gambar 4.1
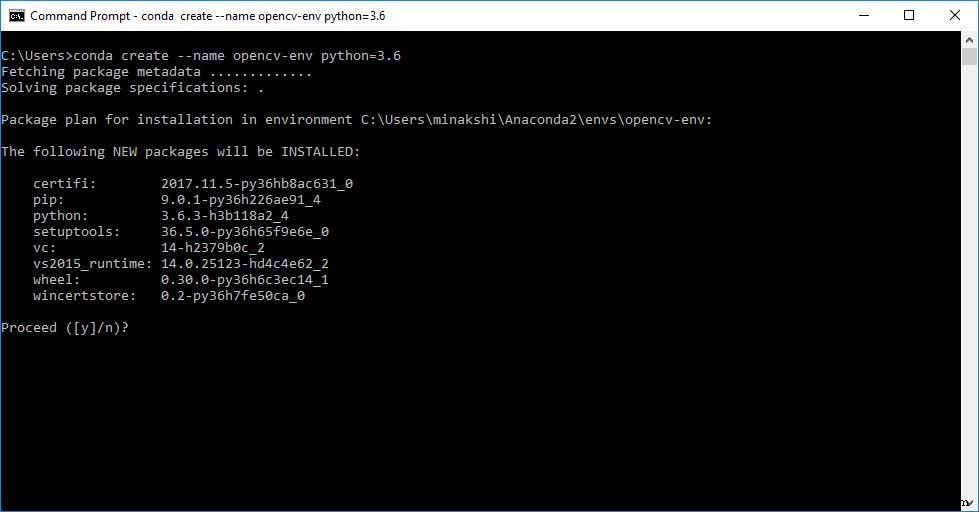
- Setelah menginstal Anaconda Navigator, buat lingkungan dengan bantuan kotak dialog lingkungan dan pilih versi python.
- Setelah berhasil membuat environment, langkah selanjutnya adalah menginstal Spyder karena mudah digunakan. Kemudian install open CV melalui perintah pip install cv2.
4.2 Menyiapkan Kumpulan Data
- Kumpulkan banyak gambar objek udara yang berbeda seperti drone, burung, pesawat terbang, helikopter, layang-layang, dan balon.
Catatan: Membuat kumpulan data lebih dari sekadar mengumpulkan gambar. Memberi nama-nama gambar dan juga memberi tahu posisi benda-benda tertentu di setiap gambar. Untuk itu, sebuah software bernama Labellmg dapat digunakan, yang mengubah gambar menjadi file teks. Seperti yang ditunjukkan pada gambar 4.6
- Setelah file Txt dari semua objek dibuat. Masukkan semua gambar dan file teks ke dalam file zip. Juga, beri nama file untuk kelas yang disertakan.
4.3 Konfigurasi YOLO
Untuk konfigurasi, ikuti langkah-langkah berikut:
- Instal darknet dengan YOLO v3.
- Untuk mengkonfigurasi YOLO, buat folder di darknet/data termasuk semua gambar dan file .txt dari dataset yang dibuat sebelumnya.
- Untuk membuat file konfigurasi khusus, buat modifikasi yang diperlukan di YOLO v3 dari cfg, sesuaikan batch, subdivisi, dan batch maksimum sehubungan dengan kelas dan langkah.
- Saat memasukkan jumlah kelas, ubah convolutional layer di atas YOLO. Juga atur acak ke 1. parameter cfg ditunjukkan pada Tabel 4.1
Tabel 4.1:Parameter CFG
| Nama | Deskripsi |
| Kumpulan | Berapa banyak gambar dan label yang digunakan dalam forward pass untuk menghitung gradien dan memperbarui bobot melalui metode backpropagation. |
| Subdivisi | Batch dibagi dalam banyak ”blok”. Gambar blok dijalankan secara paralel. |
| Langkah | 500,1000:Sesuaikan kecepatan pembelajaran setelah 500 dan 1000 batch. |
| Lapisan (Filter) | Berapa banyak convolutional kernel yang ada dalam sebuah layer. |
| Lapisan (Acak) | Masukkan layer YOLO. Jika disetel ke 1, lakukan augmentasi data dengan mengubah ukuran gambar ke ukuran yang berbeda setiap beberapa batch, digunakan untuk menggeneralisasi ukuran objek. |
- Buat folder objek Kustom melalui data/obj.names di mana semua nama yang ingin kita deteksi seperti drone, UAV, burung, layang-layang, dll ditulis.
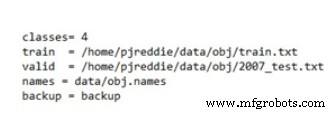
- Dalam obj.data nomor kelas, folder train.txt, valid, nama, dan bobot disertakan dan disimpan.
- Di train.txt semua data dan nama gambar disimpan.
4.4 Melatih YOLO Tentang Kumpulan Data Anda
Pelatihan YOLO untuk kumpulan data yang disesuaikan juga dilakukan melalui darknet. Mengkloning dan mengaktifkan darknet serta mengaktifkan CV terbuka. Dengan mengambil folder ZIP, file .cfg, file .names, file obj.data, dan file train.txt yang dibuat di atas, lalu konfigurasikan jaringan darknet untuk pelatihan YOLO v3, hitung eksekusinya.
Setelah Ribuan iterasi yang mungkin memakan waktu sekitar 2 jam berdasarkan daya CPU kami, kumpulan data terlatih akan siap digunakan dan diintegrasikan dengan sistem kami, dengan memberi tahu kerugian rata-rata.
4.5 Menguji kode pada Input Gambar dan Video
Setelah melatih YOLO untuk kumpulan data yang disesuaikan, mulailah menguji kode pada kumpulan data terlatih Anda yang disebut bobot YOLO. Ini memiliki 4 kelas dalam hal ini.
Coba deteksi YOLO di tempat lain. Bobot yang besar bagus dalam hal akurasi tetapi pemrosesannya agak lambat karena frame per detik yang rendah. Buat video UAV, burung dan berikan data ini sebagai input ke kode. Semua objek akan berhasil dideteksi dan dilacak dengan label yang diberikan fps dan ambang batas.
Sekarang kode tersebut dapat diuji untuk skenario real-time melalui input real-time dari webcam mengubah jangkauan kamera kami menerbangkan UAV kami dengan merekam hasilnya Anda akan melihat output seperti yang diperlukan ”Deteksi Dan Pelacakan UAV”.