Pendekatan Membuat Agen Tak Berawak Mandiri
Para peneliti telah mengembangkan pendekatan yang memungkinkan kendaraan udara tak berawak (UAV) sayap putar untuk mendarat di kendaraan darat tak berawak yang bergerak (UGV) tanpa bantuan GPS dan mengisi ulang sebelum melanjutkan. Tim agen udara dan darat otonom akan memungkinkan operasi di lingkungan pencarian dan penyelamatan yang terlalu jauh atau berbahaya bagi manusia, tetapi seringkali membutuhkan infrastruktur pemosisian dan komunikasi yang ekstensif.
Fungsi penting UAV adalah mendarat secara mandiri di kendaraan darat yang statis dan bergerak, mengisi ulang, lalu lepas landas untuk melakukan misi baru. UAV tidak akan dapat mengandalkan GPS karena mudah terganggu, sehingga perilaku ini perlu dilakukan menggunakan sumber lain seperti onboard vision.
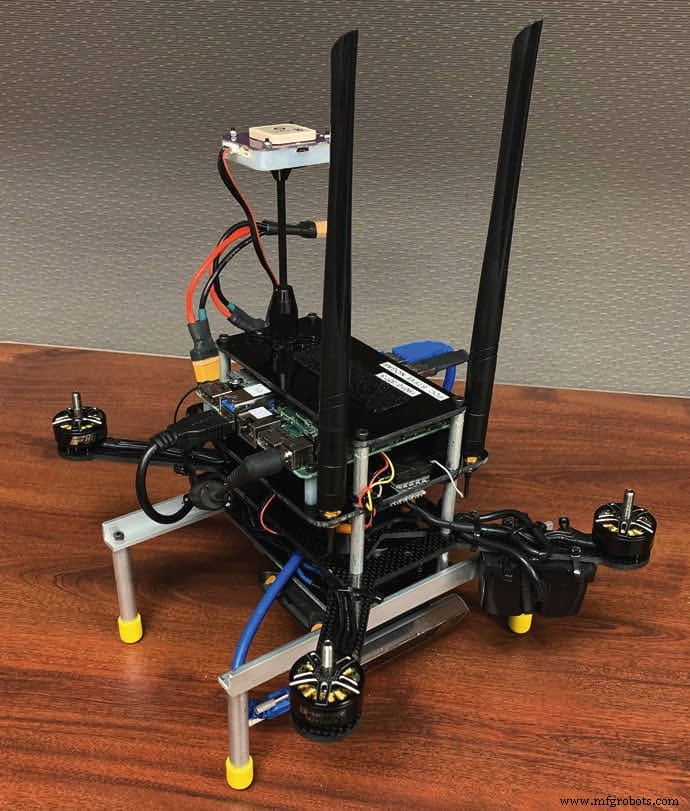
Para peneliti melakukan perhitungan di atas kendaraan menggunakan sensor dan komputer berbiaya rendah. Juga, tidak ada komunikasi yang terjadi antara UAV dan UGV. Tim melakukan simulasi software-in-the-loop dan eksperimen di luar ruangan dan mendemonstrasikan algoritme agar efektif dalam melakukan manuver pendaratan. Menggunakan quadrotor kecil yang dibuat khusus dan UGV pada kecepatan lari, para peneliti bereksperimen dengan pendaratan.
Karya ini menggabungkan perilaku yang ditolak GPS dan perilaku yang terbukti secara eksperimental. Ini menggunakan lokalisasi berbasis visi dengan odometri inersia visual, penanda unik di atas kendaraan darat yang dirancang untuk aplikasi ini, dan perilaku dan kontrol onboard. Selain itu, perilaku ini dilakukan pada UAS kecil dengan batasan komputasi yang signifikan.
Penanda khusus di atas kendaraan darat dirancang khusus untuk tugas pendaratan. Ini berisi penanda yang lebih kecil di dalam penanda yang lebih besar yang masih dapat dilihat bahkan saat kamera mendekati penanda. Pendekatan ini dapat mengurangi ketergantungan pada penanda fidusia di atas kendaraan darat dan menggantinya dengan kecerdasan buatan yang mengenali kendaraan yang ingin ditumpanginya.


