

Proses manufaktur

Manufaktur industri
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 2 | ||||
| × | 2 | ||||
 |
| × | 2 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 |
 |
| |||
|
 |
|
Latar belakang
Keponakan saya (9 tahun), dan keponakan saya (7 tahun) benar-benar gila ketika mereka melihat video robot penghindar rintangan yang saya buat beberapa waktu lalu.
Tutorial untuk yang satu itu sayangnya tidak akan pernah datang sebelum hard drive saya mati dan saya menemukan manfaat dari backup dan DropBox, GitHub dll. :)
Jadi saya memutuskan untuk melihat apakah saya bisa menemukan sesuatu yang (sedikit) mendidik dan menyenangkan. Saya menyederhanakan mainan saya sebanyak yang saya bisa dan menghasilkan penjelajah kecil ini.
Sasisnya adalah kotak yang awalnya berisi tongkat kepiting. Ternyata ukurannya pas. (Terima kasih Ayah sudah mengunyahnya sampai penuh :D ) Wadah margarin mungkin juga ukurannya pas.
Sebagai penafian, saya akan menjelaskan di sini bagaimana kami membuat robot-robot itu dan kami membiarkan anak-anak melakukan hampir semua pekerjaan sendiri. Saya tidak, dengan cara apapun, merekomendasikan melakukannya. Terserah Anda sebagai orang tua / wali / bibi / paman / babysitter yang bertanggung jawab ... untuk menentukan apakah setiap anak yang bersangkutan dapat dipercaya dengan berbagai tugas. Meski tidak terlalu diperlukan, anak-anak diharuskan memakai kacamata pelindung saat mengerjakan robot. Kotak yang kami gunakan terbuat dari plastik yang sangat lembut jadi saya membiarkan keponakan saya memotongnya sendiri setelah diberi pengarahan tentang bahaya mengarahkan pisau karpet ke arah diri mereka sendiri atau anggota tubuh mereka sendiri. Untuk mengebor lubang untuk LED, kami menggunakan obeng listrik kecil tanpa kabel untuk membatasi potensi cedera.
Dengan senang hati saya laporkan bahwa peralatan medis yang saya miliki di standby masih belum terpakai. :)
Tetapi untuk mengulangi, ANDA adalah orang dewasa!
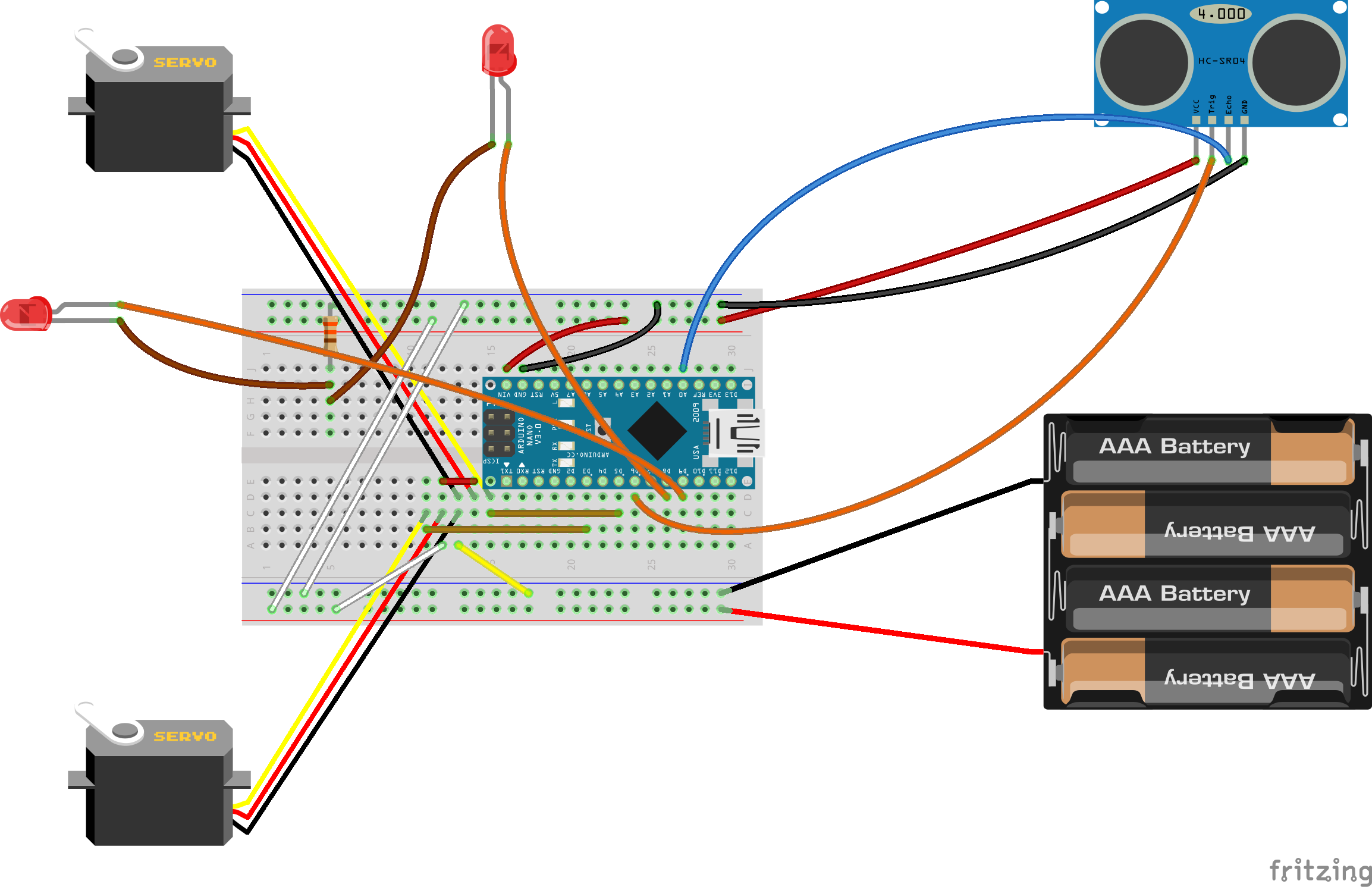
Sirkuit
Saya membuat sirkuitnya sedikit lebih rumit daripada yang bisa saya lakukan dengan menghubungkan kedua servos seperti yang saya lakukan.
Untuk anak-anak... Saya terus mengatakan itu tetapi 'anak-anak' termasuk saudara perempuan saya (35 tahun) dan ibu saya (65 tahun), keduanya menikmati sore hari Robots-and-Crafts sebanyak anak-anak yang sebenarnya. :)
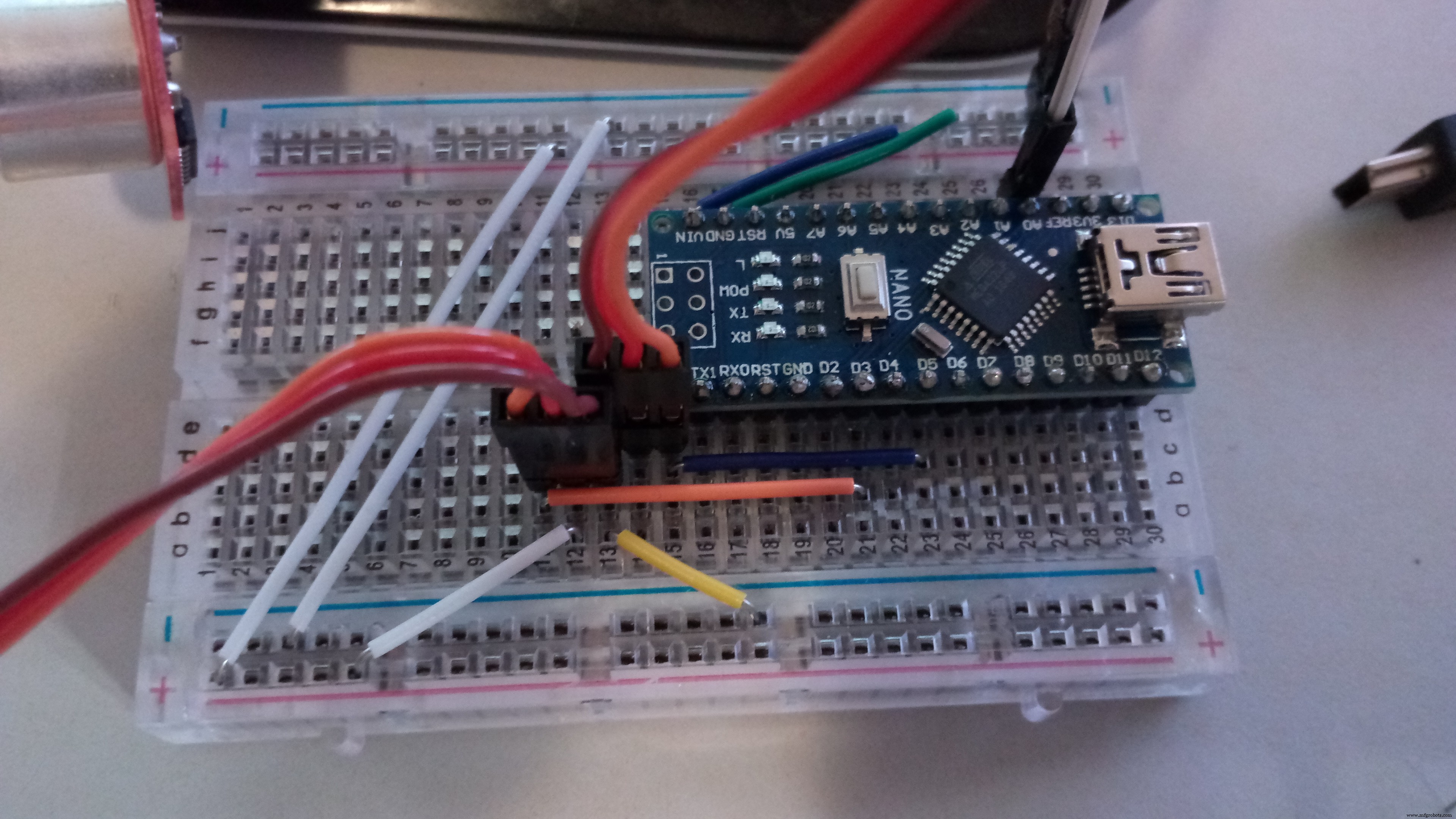
Jadi untuk audiens saya, saya mencetak gambar pada halaman A4 mencoba menjaga skala papan tempat memotong roti 1:1 dengan dunia nyata dan memberi mereka semua kabel jumper dengan warna dan panjang yang benar.
Setelah rangkaian dirakit, cukup muat program ke Arduino. Saya menyertakan komentar dalam kode untuk membantu Anda sedikit mengubah kode, jika perlu. Jika semuanya terhubung dengan benar, servos akan mulai berputar dan LED akan berkedip. Dan jika Anda meletakkan tangan Anda di depan sensor, satu servo servo akan berhenti dan yang lainnya berputar ke arah lain sebentar.
Semua siap!
Perakitan
Saatnya membawa Anda 'sasis' dan membuat lubang di dalamnya.
Di bagian depan, tandai posisi sensor Anda dan potong lubang 'mata'.
Di samping, ukur dengan baik di mana Anda ingin roda pergi dan potong lubang di samping, di tepi bagian bawah kotak, cukup besar untuk servo masuk tetapi cukup kecil sehingga braket pemasangan tidak masuk melalui.
Menggunakan mata bor kecil, bor 2 lubang kecil untuk LED.
Di bagian bawah kotak, ke arah belakang, kencangkan roda kastor (atau lem panas).
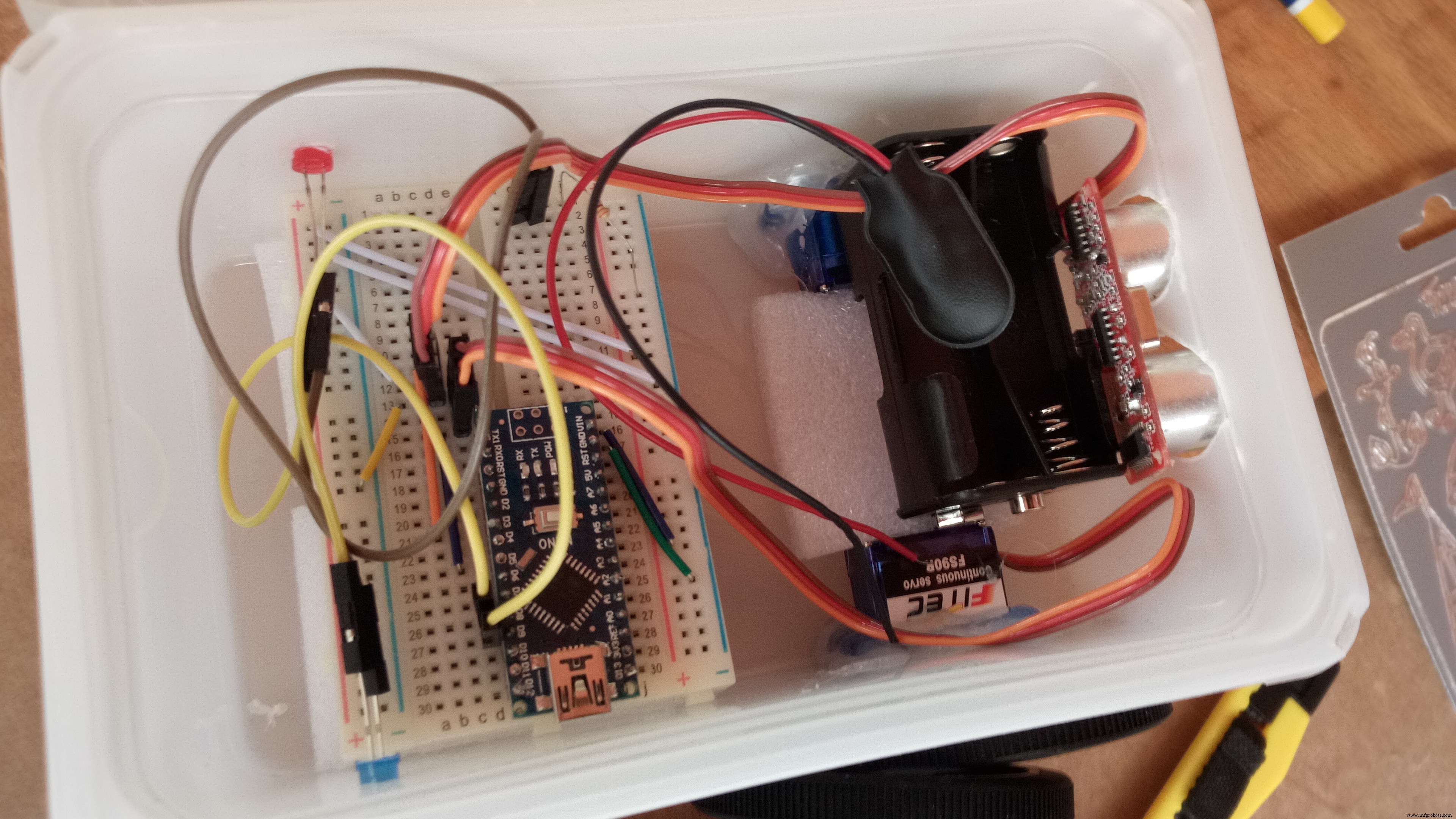
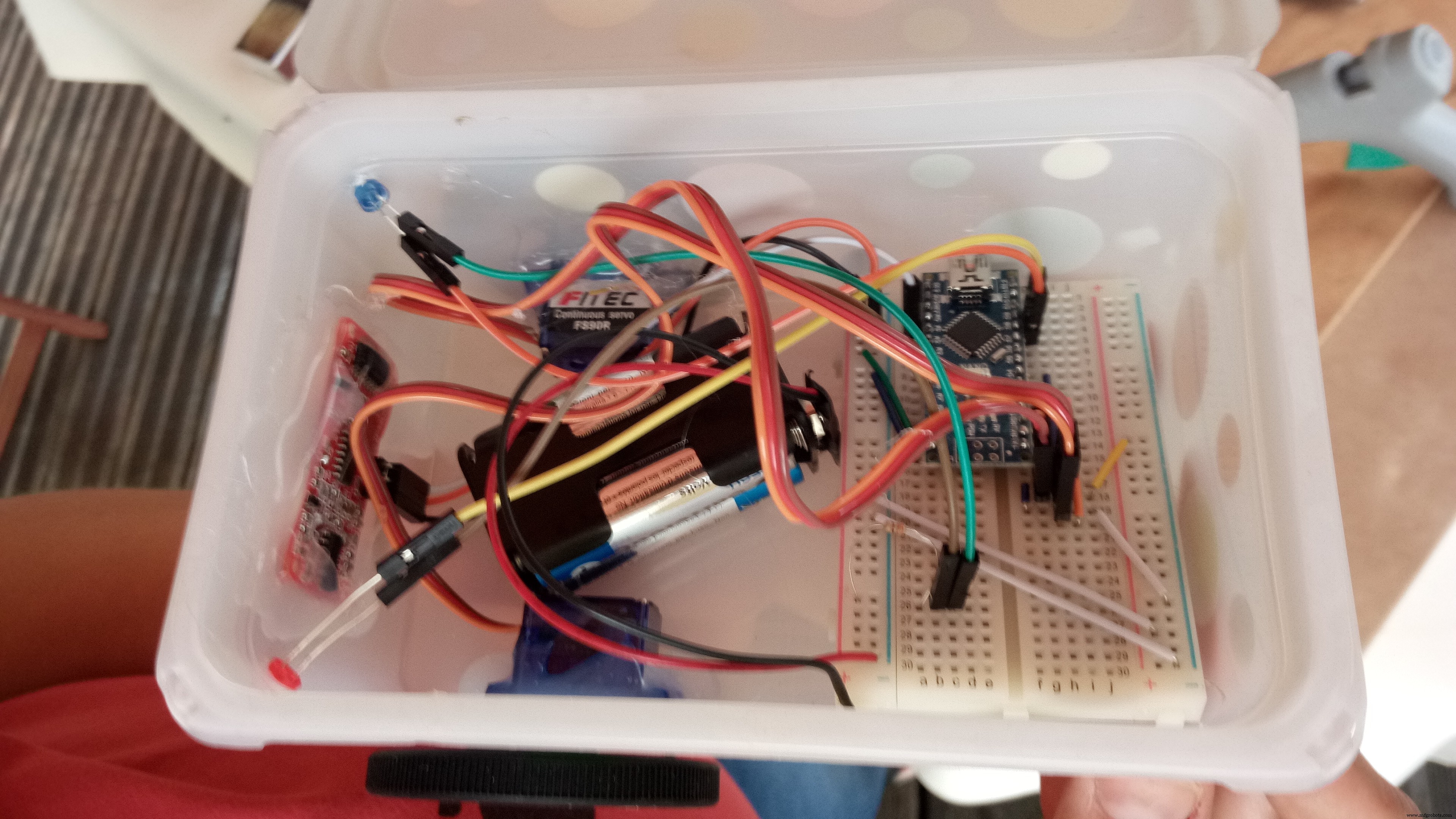
Sekarang Anda siap untuk memasukkan semuanya ke dalam kotak, dan merekatkan barang-barang tersebut pada tempatnya.
Pasang roda ke servos setelah lem mengeras.
Hiasi kotaknya! (Dan posting gambar di atasnya! Itu akan luar biasa!)

Masukkan baterai dan saksikan penjelajah kecil bergerak di sekitar ruangan secara acak sampai baterai habis. Atau Anda bosan dengan kebisingan. Atau anjing itu menangkapnya! :D
#include/*Jika Anda memiliki sensor dengan hanya 3 pin, Uncomment line 6 dan comment out line 7*///int distanceR =A0; // Jarak pinint pemicu =6; //Memicu pinint pingDelay =10; //panjang pulsa dari jarak sensorin Ultra-sonikR =A0; // Gema pinint led1 =8, led2 =9; //LEDsServo leftPower;Servo rightPower;waktu flash lama yang tidak ditandatangani; unsigned long nextSensorTime;float obstacleDist =0.0f;void setup() { //Serial.begin(115200); leftPower.attach(3); rightPower.attach(5); leftPower.write(90); rightPower.write(90); pinMode(led1, OUTPUT); pinMode(led2, OUTPUT); delay(1000);}void loop() { LED(); /* Ini mencegah sensor menguras baterai terlalu cepat dengan membatasi pemeriksaan hingga 5 kali per detik Anda dapat meningkatkan jumlah ini untuk memeriksa lebih jarang tetapi kemudian mungkin menabrak dinding... */ if(millis() - nextSensorTime> 200){ nextSensorTime =milis(); /* Saya melakukan 2 pembacaan di sini karena terkadang sensor menjadi bingung dan tidak menghasilkan apa-apa... */ float reading1 =TakeReading(); penundaan(100); float reading2 =TakeReading(); Serial.println(membaca1); Serial.println(membaca2); //Lalu kita ambil jarak terbesar untuk obstacleDist obstacleDist =reading1>=reading2 ? membaca1 :membaca2; //Jika jaraknya kurang dari 10cm, belok, jika tidak, lurus. if(obstacleDist <10.0f){ //Serial.println("putar"); berbelok(); }else{ //Serial.println("maju"); maju(); } }}Vid LED(){ if(millis() - flashTime> 1000) flashTime =millis(); if(millis() - flashTime <500){ digitalWrite(led1, LOW); digitalWrite(led2, TINGGI); }else if(millis() - flashTime> 500){ digitalWrite(led1, HIGH); digitalWrite(led2, RENDAH); }}void forward(){ /* Jika ternyata robot Anda mundur, tukar angka 135 dan 45. */ leftPower.write(135); rightPower.write(45);}void turn(){ /* Jika Anda ingin robot Anda berbelok ke arah lain, Batalkan komentar pada baris 92-93 di bawah dan beri komentar 95-96 */ //leftPower.write(90); //rightPower.write(135); leftPower.write(45); rightPower.write(90); delay(350);}float TakeReading(){ unsigned long echo =0; hasil float =0,0f; pinMode(jarak, OUTPUT); digitalWrite(jarak, RENDAH); delayMicroseconds(2); digitalWrite(jarak, TINGGI); delayMicroseconds(pingDelay); digitalWrite(jarak, RENDAH); pinMode(jarakR, INPUT); digitalWrite(jarakR, TINGGI); echo =pulseIn(jarakR,TINGGI,38000); hasil =echo/58.138; kembali hasil;}
Proses manufaktur
Komponen dan persediaan Arduino MKR1000 × 1 Nano Hub Sensor Infineon × 1 LCD Nokia 5110 × 1 Modul Bluetooth HC-05 × 1 Breadboard (generik) × 1 Kabel jumper (generik) × 1 Sakelar Tombol Tekan SparkFun 12mm × 1 Buzzer
Komponen dan persediaan SparkFun Dual H-Bridge driver motor L298 × 1 Motor DC (generik) × 4 Arduino UNO × 1 LED (generik) × 8 Resistor 221 ohm × 8 Servo (Tower Pro MG996R) × 1 Sensor Ultrasonik - HC-SR04 (Generik) × 1 A
Komponen dan persediaan Sensor Ultrasonik - HC-SR04 (Generik) × 2 Arduino Nano R3 × 1 Resistor foto × 1 Maxim Integrated 8x8 LED Matrix MAX7219 × 2 Ukuran Setengah Papan Tempat Memotong Roti Tanpa Solder × 1 Kabel jumper (generik) × 1
Komponen dan persediaan Arduino Nano R3 × 1 Potensiometer putar (generik) × 7 Sakelar Tombol Tekan SparkFun 12mm × 7 port MIDI × 1 Resistor 221 ohm × 4 LED (generik) × 2 Tentang proyek ini Pembaruan 11.03.2019 Hai, Saya