Tentang proyek ini
Pemberitahuan:
Perbarui 12/5/16 dari Drew:Silakan klik Masalah Umum ke kanan dan tinjau sebelum menyelesaikan pembangunan ini. Varietas tertentu dari kit memiliki masalah yang diketahui dan bagian yang hilang. Kami telah mencoba untuk menguraikan masalah umum. Beberapa masih diselesaikan. Perbaikan akan digulirkan ke dalam instruksi saat dikonfirmasi. Laporkan setiap tambahan kepada saya (@ReanimationXP) di #intel saluran slack.hacksterlive.com . Terima kasih!
Jangan Meledakkan Arduino
Kami mendapat laporan tentang beberapa perakitan bot mereka dan meninggalkan jumper VIN di Motor Shield. Harap luangkan waktu untuk menghapusnya sebelum memulai. Mengapa? Lihat Menghidupkan Arduino dan Perisai di bawah.
Pendahuluan
Proyek ini mendemonstrasikan cara menggunakan chip BLE bawaan pada Arduino 101 untuk mengontrol robot kecil 4x4 dari laptop Anda. Dengan meminta komputer Anda mengambil alih kendali dari Arduino 101 itu sendiri, Anda membuka kemungkinan untuk menggabungkan metode kontrol intensif prosesor seperti visi komputer, mengemudi otonom, dan loop umpan balik lanjutan (PID).
Perangkat Keras
Mari kita mulai! Apa yang datang dengan anak anjing ini? Platform robot yang digunakan adalah multi-chassis 4x4 dari Sparkfun. Ini cukup tahan lama dengan bingkai aluminium dan memiliki banyak titik pemasangan untuk sensor tambahan.
Langkah-langkah:
1) Kit memerlukan beberapa perakitan sederhana, tetapi membutuhkan waktu. Ikuti petunjuk yang disertakan dengan kit Anda untuk perakitan, dengan penyimpangan berikut:
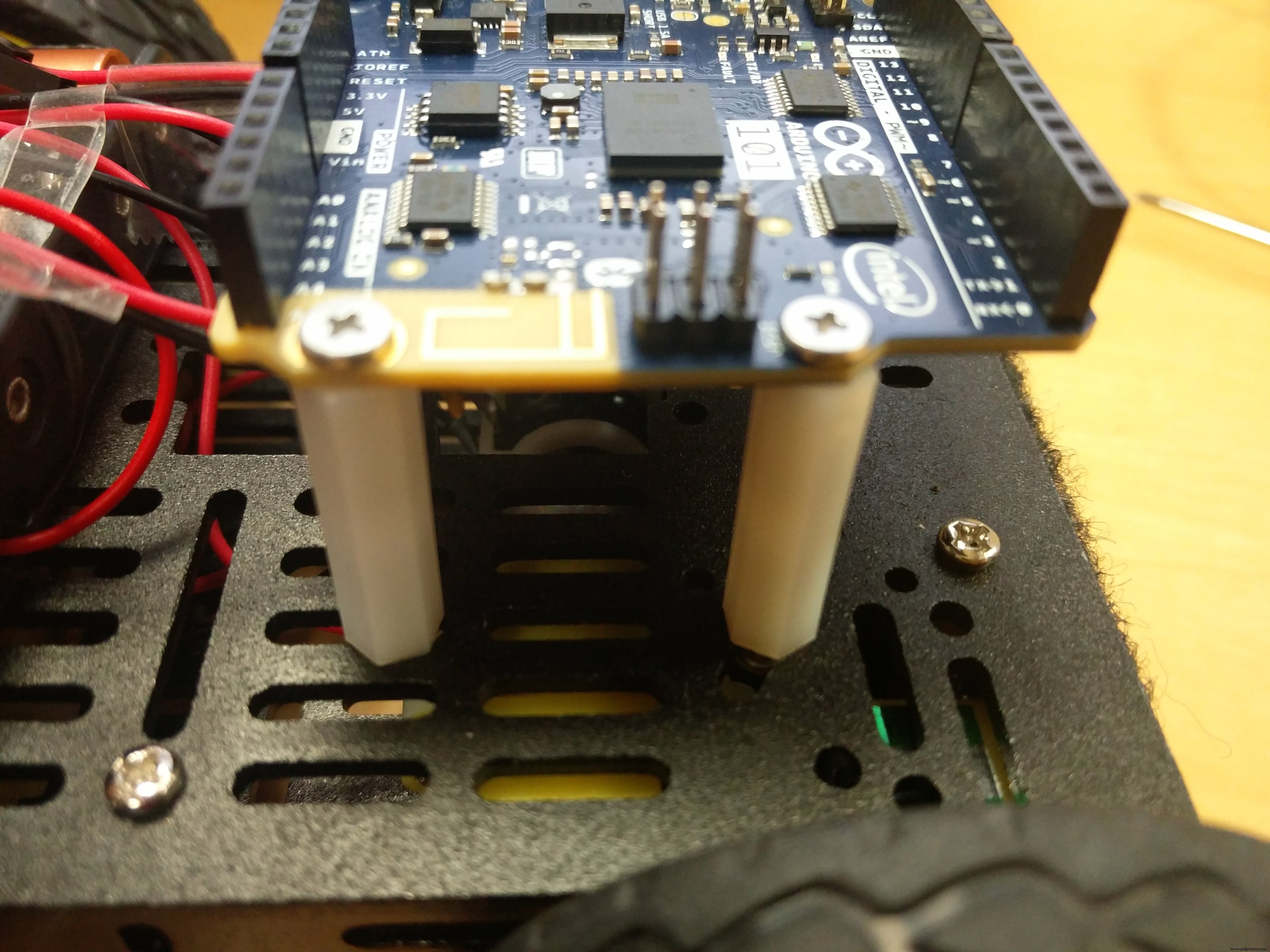
- Pasang Arduino 101 pada standoff (bagian dari Kit Komponen terpisah) ke pelat atas (penutup) sebelum memasang penutup ke sasis robot. Jika Anda tidak memiliki penghalang, cukup lindungi bagian bawah 101 entah bagaimana dan tempelkan ke tutupnya.
2) Adafruit Motor shield v2.3 juga memerlukan beberapa perakitan, dan yang kami maksud adalah penyolderan. Pin header perlu disolder. Jika Anda menerima header perempuan dengan kit komponen Anda (seperti yang ada di A101), gunakan ini dan buang yang laki-laki normal. Jika tidak, gunakan varietas jantan yang disertakan dengan pelindung motor. Anda dapat menemukan petunjuk terperinci untuk menyolder kedua jenis di sini (gulir ke bawah ke bagian yang sesuai untuk jenis header pria/wanita):https://learn.adafruit.com/adafruit-motor-shield-v2-for-arduino/install-headers .
Jika Anda belum pernah menyolder sebelumnya, Anda mungkin ingin berlatih pada sesuatu yang Anda tidak keberatan membakarnya karena tajuknya bisa sedikit sulit untuk disolder pada tempatnya. Meminta seseorang yang sering memperhatikan Anda akan menjadi cara tercepat untuk belajar. Mulailah setiap header dengan menyolder satu pin di tepinya, tarik kencang pada header sehingga rata dengan papan dan lurus sempurna. Anda dapat menggunakan teknik ini untuk menyelaraskan berbagai hal sebelum menyolder semua pin yang akan mengunci header di tempatnya secara permanen.
Lakukan header female 6-pin-grid di sebelah logo Bluetooth. Tampilannya seperti ini:[:::] Colokkan sisi plastik ke Arduino 101 sehingga benar-benar rata, pasang pelindung motor Anda yang sekarang telah disolder penuh di atasnya, dan biarkan sisi jantan dari kisi-kisi 6-pin menyodoknya. Tekan pelindung motor ke bawah sehingga terpasang sepenuhnya ke 101, lalu solder sisi laki-laki dari header 6-pin-grid.
3) Pasang pelindung motor rakitan ke bagian atas Arduino 101 menggunakan header yang Anda solder.
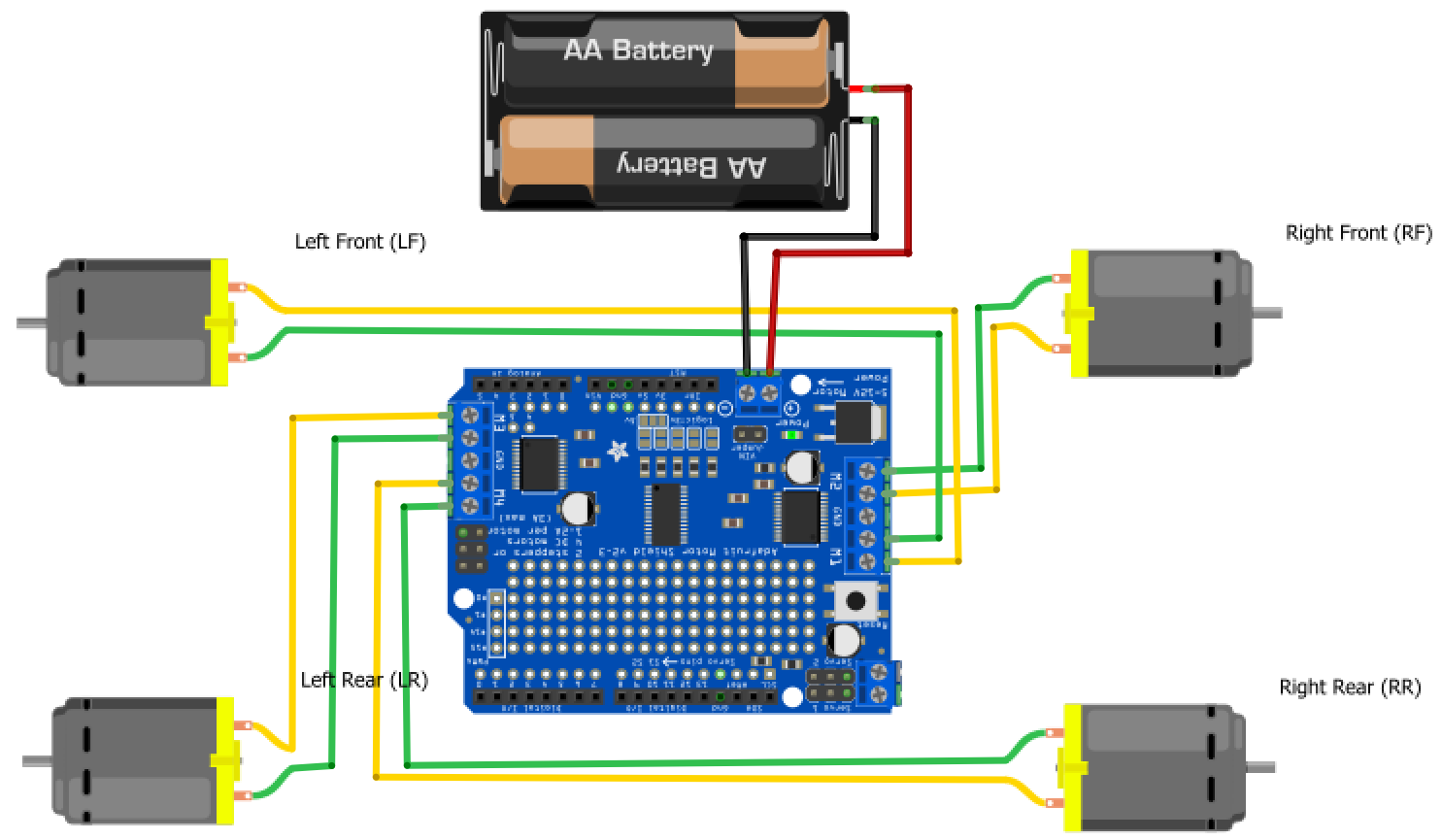
4) Gunakan kabel jumper (laki-laki ke laki-laki) untuk menghubungkan motor ke blok terminal keluaran motor pada pelindung motor seperti yang ditunjukkan di bawah ini. Pastikan Anda mencocokkan pasangan kabel negatif dan positif yang benar dan ikuti diagram pengkabelan di bawah ini. Catatan:Kabel kuning positif pada diagram , dan merah pada motor yang sebenarnya. Kabel hijau negatif pada diagram , hitam pada motor yang sebenarnya.
5) Periksa apakah jumper VIN TIDAK terpasang sebelum melanjutkan. Gunakan sepasang kabel jumper untuk menghubungkan ke 5 hitungan AA paket baterai yang disertakan dengan kit robot ke blok terminal input tegangan pada pelindung motor, dengan memperhatikan orientasi positif (merah) dan pembumian (hitam) seperti yang ditunjukkan pada diagram di bawah.
Catatan: Pemegang 2x AA yang digambarkan di bawah ini TIDAK AKURAT ke kehidupan nyata dan Anda tidak akan memilikinya di kit Anda - gunakan pemegang AA 5x disertakan dalam kit robot Anda. Beberapa kit juga tidak mengandung 4 motor. Dalam hal ini, cukup sambungkan motor yang tepat ke M1 dan M2 seperti yang ditunjukkan di sisi kanan papan dan dua motor teratas.
6) Solder jack barel ke kabel yang keluar dari baterai kedua. Pastikan Anda menyolder kabel positif merah ke sambungan tengah (lebih pendek) pada jack barel.
Catatan :Tempat baterai 6x AA dan colokan barelnya di bawah tidak disertakan dalam pengiriman pertama kit duta besar. Kami akan melengkapi pengiriman ini dengan pemegang AA tambahan dan mungkin komponen tambahan segera. Selesaikan pembuatan bot dan lewati ke Ikhtisar Perangkat Lunak untuk saat ini.

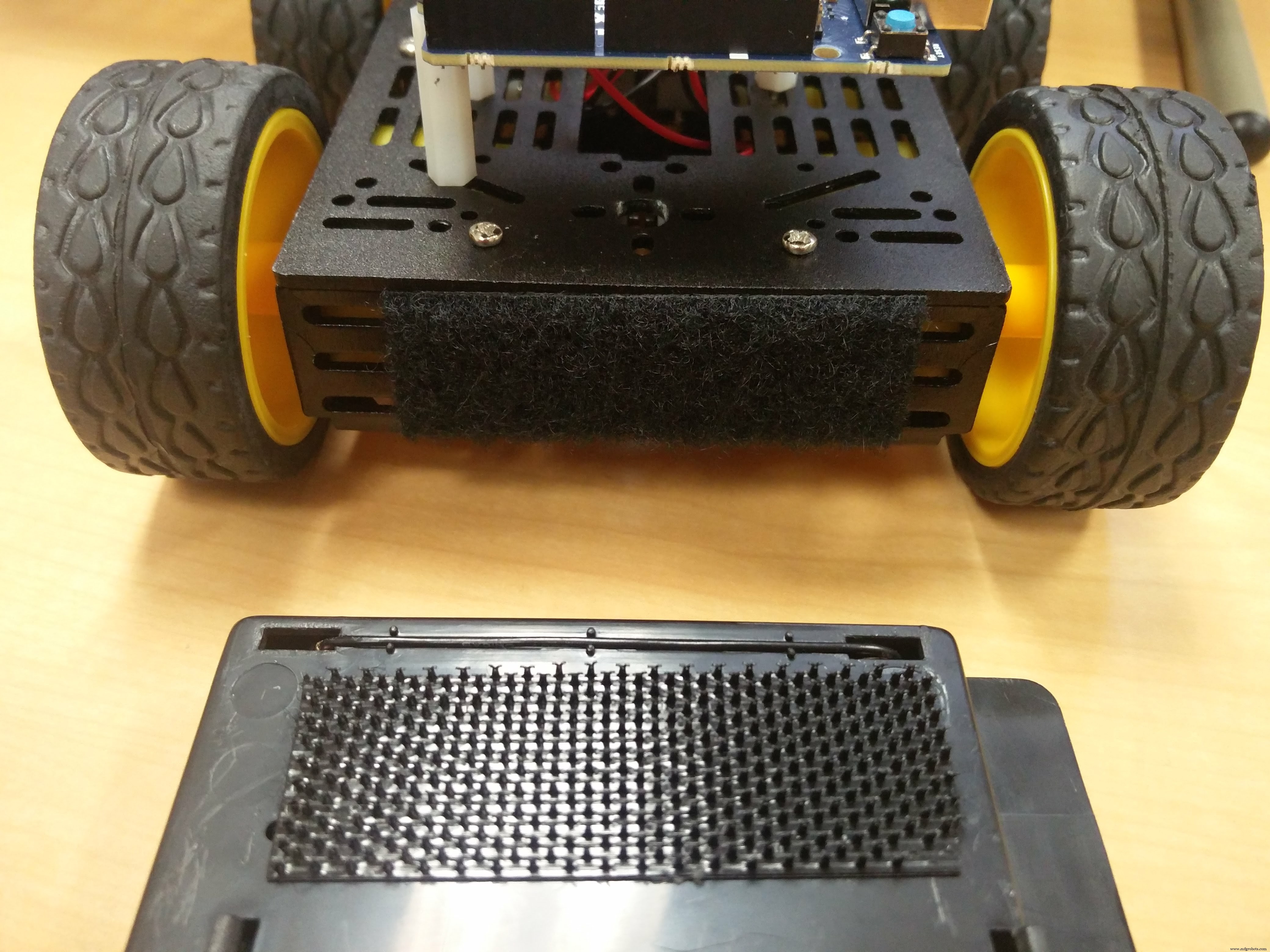
7) Pasang baterai AA 6x ke bagian belakang robot dengan strip velcro:
Pasang steker barel ke Arduino 101 untuk menyalakannya. Sekali lagi periksa apakah jumper VIN tidak terpasang.
Robot sekarang harus sepenuhnya dibangun! Pastikan kedua bank baterai dicabut agar tidak menguras daya.
Ikhtisar Perangkat Lunak
Sistem kendali robot terdiri dari dua perangkat lunak utama. Yang pertama adalah sketsa server Firmata yang dimuat di Arduino 101. Firmata memungkinkan komputer Anda mengakses pin pada Arduino - dan dengan ekstensi berkomunikasi ke pelindung motor yang mengontrol motor itu sendiri. Firma juga memungkinkan komunikasi dua arah sehingga jika di kemudian hari Anda memasang sensor ke robot Anda, Anda akan dapat mengirim data sensor kembali ke komputer Anda.
Bagian kedua dari perangkat lunak adalah klien Firma yang berjalan di komputer Anda. Ada banyak klien Firma yang berbeda untuk berbagai bahasa tetapi dalam proyek ini kita akan menggunakan klien Firma yang dibangun ke dalam Johnny-Five. Johnny-Five adalah platform robotika dan IoT untuk Arduino yang dibangun di atas Node.js. Info lebih lanjut dapat ditemukan di sini:http://johnny-five.io/. Johnny-five memiliki banyak library yang berguna termasuk Firma dan konfigurasi untuk Adafruit Motorshield yang kami gunakan.
Agar klien dan server Firmata terhubung, kami menggunakan ble-serial, sebuah perpustakaan node.js yang ditulis untuk membuka koneksi serial melalui BLE ke Arduino 101. https://github.com/monteslu/ble-serial
Akhirnya untuk membaca dalam perintah keyboard kita akan menggunakan keypess, sebuah perpustakaan node.js untuk membaca dalam penekanan tombol. https://github.com/TooTallNate/keypress
Muat Sketsa Arduino
1) Untuk memuat sketsa server Firmata di Arduino 101 Anda harus mengunduh dan menginstal Arduino IDE terlebih dahulu:https://www.arduino.cc/en/Main/Software
2) Setelah Anda menginstal IDE dasar, Anda harus menginstal Arduino 101 Board. Tutorial berikut mencakup pemasangan papan serta pemrograman dasar, jika Anda tidak terbiasa dengan Arduino, ini adalah tempat yang baik untuk memulai:https://www.arduino.cc/en/Guide/Arduino101 . Versi singkatnya adalah Anda perlu menginstal paket "Intel Curie Boards" melalui Boards Manager di IDE. Setelah Anda selesai melakukannya, Arduino /Genuino 101 akan muncul di submenu Board.
3) Pasang Arduino 101 ke komputer Anda melalui kabel USB.
4) Di Arduino IDE buka Tools -> Board dan pilih Arduino / Genuino 101 . Tidak melihatnya? Kembali ke langkah 2.
5) Buka Alat -> port dan pastikan Anda memiliki port yang benar untuk papan yang dipilih. Jika Anda tidak yakin port mana yang akan digunakan, cabut Arduino dan lihat port mana yang hilang dari daftar.
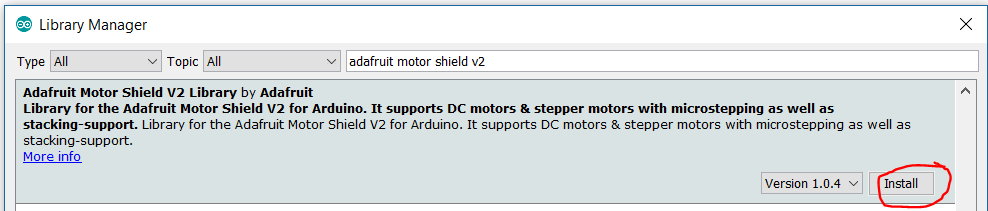
6) Instal paket AdaFruit Motor Shield v2. Buka Sketsa -> Sertakan Perpustakaan -> Kelola Perpustakaan, lalu cari "AdaFruit Motor Shield v2". Pilih dan kemudian klik tombol Instal.
6a) Jika Anda ingin menguji bot Anda, flash file .ino berikut untuk menguji motor Anda. Secara default file ini akan membuat bot Anda Maju, Mundur, Belok Kiri, lalu Belok Kanan berkali-kali. https://github.com/ReanimationXP/a101_motortest .
CATATAN! Bersiaplah untuk roda Anda bergerak!
Jika Anda mem-flash program a101_motortest ke bot, roda akan mulai bergerak segera setelah sketsa mulai dijalankan. Jika Anda ingin menghentikan roda, Anda dapat menarik kabel USB (mematikan daya ke Arduino) atau menarik salah satu baterai.
7) Di Arduino IDE, buka File -> Contoh -> Firmata -> StandardFirmataBLE untuk memuat sketsa server Firmata BLE. Unggah sketsa ke Arduino 101 dengan mengklik panah unggah di sudut kiri atas editor.
Jika sketsa berhasil dimuat, pesan terakhir dalam output seharusnya adalah "Sketsa dimulai dalam 5 detik."
Instal Python 2.7.13
1) Anda memerlukan Python 2.7.13 untuk menginstal dan mengkompilasi paket Node.js bluetooth-hci-socket.
2) Buka https://www.python.org/downloads/. Unduh Python 2.7.13 dan instal.
Muat Klien Firma
1) Klien Firma akan berjalan di Node.js, jika Anda belum menginstalnya, buka tautan berikut dan ikuti petunjuk instalasi:https://nodejs.org/en/
2) Setelah Node.js diinstal, buat folder baru untuk memuat kode kontrol Anda.
3) Buka prompt perintah Node.js dan navigasikan ke folder proyek Anda. Jika Anda akan menginstal alat Windows pada langkah berikutnya, jalankan command prompt dalam mode Administrator.
4) Jika Anda menggunakan Windows 10, Anda harus menginstal alat Windows. Lakukan ini dengan menggunakan perintah berikut:
npm install --global --production windows-build-tools
5) Instal modul NPM berikut:
npm install johnny-fivenpm install keypressnpm install ble-serial npm install bluetooth-hci-socket
6) Unduh kode kontrol di github ( https://github.com/martinkronberg/Firmata-BLE-Bot ) dan pastikan control.js ada di folder proyek Anda. Anda dapat mengkloning repo jika Anda mau tetapi kemungkinan pembaruan cukup kecil...
Jalankan Kode
Kami sekarang siap untuk mulai mengemudikan robot! Pastikan kedua bank baterai dicolokkan dan dari folder proyek Anda berjalan:
kontrol simpul.js
Jika semuanya berfungsi, Anda akan mendapatkan pesan yang mirip dengan:
1476382259569 Terhubung [objek Objek]
Sekarang ketika Anda menekan "w", robot akan bergerak maju, "s" untuk mundur, "a" dan "d" akan memutar robot ke kiri dan kanan.
Anda mungkin mendapatkan pesan seperti "Tidak ditemukan perangkat USB Bluetooth 4.0 yang kompatibel". Pastikan komputer Anda mendukung Bluetooth dan Bluetooth diaktifkan.
Perhatikan bahwa Anda dapat memeriksa Pengelola Perangkat di Windows untuk melihat apakah PC Anda mendukung Bluetooth. Cari subpohon yang disebut "Radio Bluetooth".
Versi Blynk
Jika Node dan Firmata tidak bekerja dengan baik untuk Anda, Anda dapat menggunakan Perpustakaan Blynk.cc sebagai gantinya. Ini mudah digunakan, lintas platform, memiliki antarmuka untuk perangkat seluler.
1. Unduh perpustakaan Blynk.cc dan instal ke Arduino. Ini dapat dilakukan melalui Manajer Perpustakaan Arduino. Versi 0.4.7 pada saat penulisan.
2. Download dan flash sketsa berikut ke Arduino 101 Anda:
https://github.com/ReanimationXP/a101_blynk_base
3. Unduh aplikasi Blynk. Buat antarmuka berikut dalam aplikasi:
Masalah Umum
Bagian yang Hilang: 6x AA Battery Holder dan Barrel Jack-nya, Tank kit hanya memiliki 2x motor, bukan 4x.
Masalah Daya dengan Tank Kit: Tampaknya kit tangki Sparkfun memiliki kekurangan - dudukan baterai yang disertakan dengannya tidak cukup kuat untuk menggerakkan pita tangki. Solusinya adalah dengan melepas talinya, mengganti dudukan baterai 5x AA dengan baterai lipo 2S (7.4v) dengan mAh yang signifikan (misalnya, 750mah), dan/atau menyalakan 101 dengan salah satu bank baterai USB Intel Anda.
Selain itu, jika dudukan baterai yang disertakan dengan sasis Sparkfun tampaknya tidak berfungsi, baterai mungkin tidak terpasang dengan benar. Tarik ke belakang sambil mendorong ke bawah dan Anda akan merasakannya terkunci di tempatnya.
Masalah Bluetooth/BLE: Dukungan BLE memiliki persyaratan minimum. Komputer harus mendukung Bluetooth 4.0 atau lebih tinggi, dengan Windows 8.1 atau lebih tinggi, untuk dijamin mendukung BLE, jenis Bluetooth hemat energi. Beberapa komputer mungkin masih mengalami masalah tergantung pada tumpukan driver dan perbedaan perangkat keras. Sebagian besar ponsel cerdas lebih kompatibel dengan BLE. Kami sedang mencari untuk menggunakan platform Blynk untuk mengontrol 101, yang sekarang termasuk dukungan BLE. Detailnya akan diposting di sini jika tersedia.
Kami juga telah diberitahu bahwa bagian BLE dari Arduino 101 sangat terkelupas jika tidak diberi daya dengan benar. Pastikan Anda menghubungkan daya yang memadai ke Arduino 101. Saya akan menyarankan catu daya USB 5v yang kuat, 2 amp atau lebih untuk mengatasi masalah pemadaman listrik.
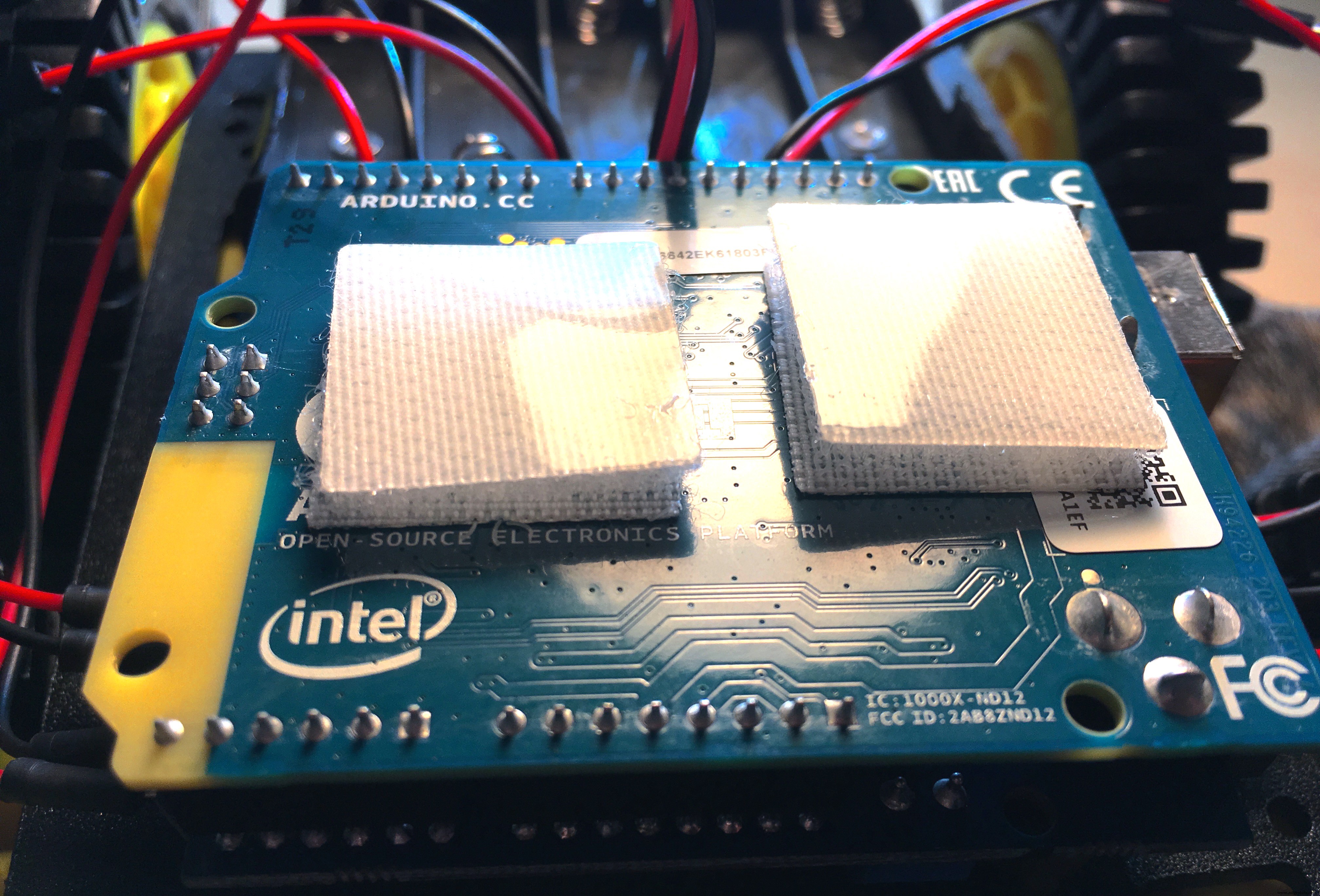
Kompatibilitas Sekrup dengan Arduino 101: Sekrup dari kit komponen memiliki kepala yang terlalu besar untuk dipasang pada 101. Cara mengatasinya adalah dengan menukar beberapa sekrup perak dari kit robot sebagai gantinya, dan sebaliknya jika memungkinkan. Anda juga dapat menggunakan kotak Velcro, sehingga papan diikat dan diisolasi dengan aman, tetapi mudah dilepas.
Perpustakaan: Anda perlu memutakhirkan perpustakaan Firmate ke setidaknya 2.5.3 (versi di bawah 2.5.3 tidak menyertakan sketsa Firmate BLE)
Tautan pendek untuk lokakarya
Berikut adalah beberapa sumber daya untuk membuat hidup Anda lebih mudah saat menjalankan pertemuan. Dua tautan terakhir memerlukan penginstalan pustaka Adafruit Motor Shield v2.
- Tutorial BLE Bot 9000 ini:http://bit.ly/blebot1
- Skrip uji motor DC Pete Hoffswell:http://bit.ly/blebot2
- Robotik yang dikendalikan ponsel BLE dengan Blynk:http://bit.ly/blebot3
Kode
Kontrol layar sentuh
Kontrol 'bot Anda dari layar sentuh, menggunakan server Express! (Untuk peretas tingkat lanjut.) https://github.com/monofuel/blebot9000 Kode Kontrol Robot
Github dengan kode untuk menjalankan robothttps://github.com/martinkronberg/Firmata-BLE-Bot Skema
PDF untuk merakit sasis