Tentang proyek ini
Halo semuanya,
Hari ini kita akan melihat tutorial lengkap tentang cara mengontrol dudukan kamera FPV 2-Axis dengan modul joystick, dudukan kamera hadir dalam paket kecil yang berisi beberapa penyangga dan bagian akrilik, beberapa sekrup, dan dua motor servo.
Persyaratan:Jadi sebelum melanjutkan, jika Anda tidak terbiasa dengan joystick, maupun motor servo, berikut adalah dua tutorial untuk Anda:
- Cara menghubungkan modul Joystick dengan board Arduino
- Gunakan motor servo dengan Arduino
Jadi di sini kita akan menggunakan dua metode untuk mengontrol servos:yang pertama di mana servos mengikuti posisi joystick dan mereka bergerak saat kita menggerakkan tongkat kita, yang kedua servos mulai bergerak ke arah di mana joystick menunjuk dan mereka tetap di sana sampai kita menggerakkan tongkat lagi atau mengubah arah.
Ini adalah demo dari apa yang akan kita miliki di akhir:
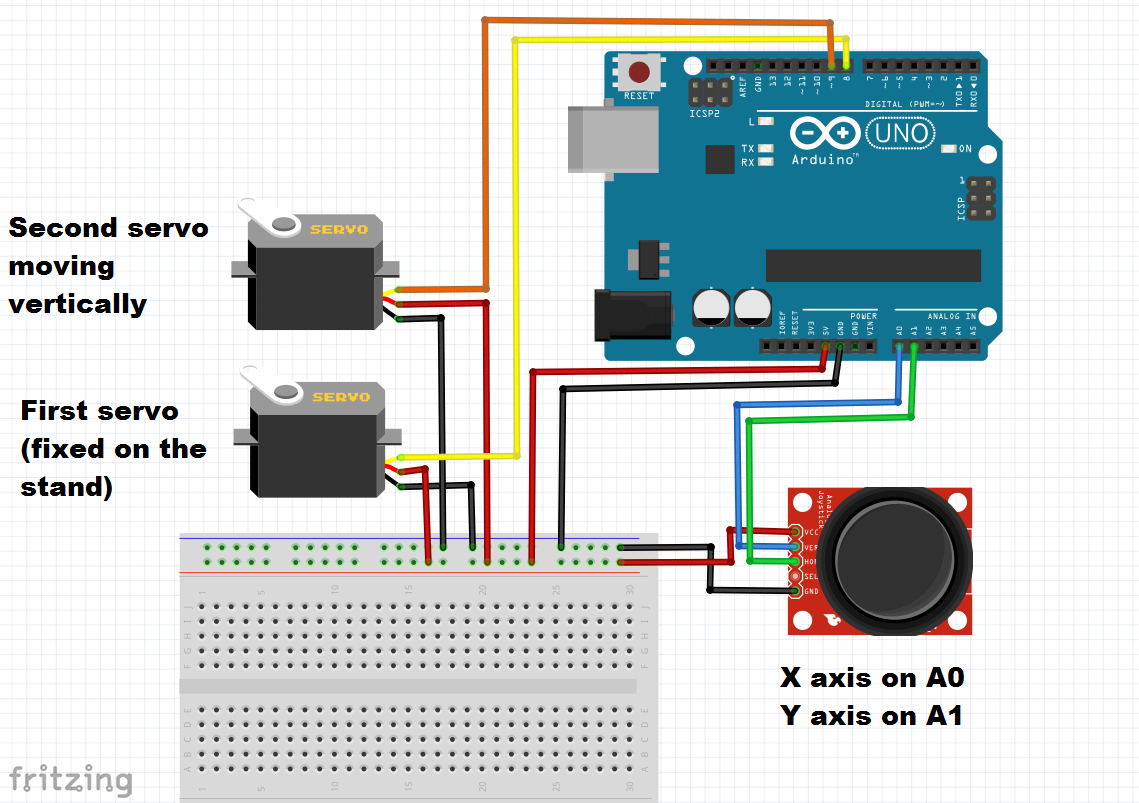
Dalam video tutorial saya melakukan langkah demi langkah saat pengkabelan atau kalibrasi juga langkah demi langkah saat pengkodean, tetapi di sini saya akan memberi Anda seluruh pengkabelan yang tidak menjadi masalah karena tidak ada modul atau servo yang memengaruhi yang lain.
Agar tidak bingung dengan sumbu joystick yang dimiliki joystick saya (sumbu X di atas kemudian sumbu Y) di sini dalam gambar mereka terbalik dan dinamai sebaliknya tetapi saya membiarkan kabel seperti yang saya gunakan Anda dapat mengubahnya sesuka Anda (pin servo, joystick masukan, petunjuk arah ...)
Jadi tidak membingungkan Anda karena saya sebenarnya menggunakan banyak kode dalam video, tetapi mereka sangat mendasar (posisi servo, membaca nilai analog dari joystick ...) Saya sudah melakukan ini sebelum Anda dapat memeriksa tutorial saya yang lain, jadi di sini Saya hanya mengunggah dua kode untuk dua versi final seperti yang terlihat di video.
Jika Anda membutuhkan sesuatu tentang ini, Anda dapat menghubungi saya.
Kode
- Kode 1 seperti di video
- Kode 2 seperti di video
Kode 1 seperti di videoArduino
//Kode ini digunakan dengan dudukan kamera fpv sumbu ganda yang menggunakan dua servo, menambahkan modul joystick//kita mengontrol posisi dudukan dengan menggerakkan tongkat analog, dudukan mengikuti gerakan joystick//Lihat surtrtech.com untuk informasi lebih lanjut#include //Servo perpustakaan dan deklarasiServo myservo1;Servo myservo2;int YAxis =1; //Mendeklarasikan di mana sumbu X dan sumbu Y dari pin joystick adalah wiredint XAxis =0; //Tentu saja input analog batalkan setup() { Serial.begin(9600); //Mengatur baude rate monitor Serial dan meluncurkan pinMode(XAxis, INPUT); // Mendeklarasikan mode pin dan pin servo myservo1.attach(8); pinMode(YAxis, INPUT); myservo2.attach(9);}void loop() { int X=analogRead(XAxis); //Membaca dari potensiometer sumbu X X=X*0.1756; //Mengonversi rentang potensiometer dari 0-1023 ke 0-180 batas servo Anda dapat mengubahnya jika Anda memiliki servos 360° X=180-X;// Ini digunakan agar servo berputar ke posisi yang tepat jika tidak itu akan dibalik myservo1.write(X); //Setelah mengadaptasi, kami menyuntikkan nilai itu ke servo pertama int Y=analogRead(YAxis);//Membaca dari potensiometer sumbu Y Y=Y*0.1466; //Di sini kami melakukan konversi yang sesuai dengan batas servo jadi kami beralih dari 0-1023 ke 0-150 myservo2.write(Y);//Dan kami menyuntikkan ke servo kami}
Kode 2 seperti pada videoArduino
//Kode ini digunakan dengan dudukan kamera fpv sumbu ganda yang menggunakan dua servo, menambahkan modul joystick // Kami mengontrol posisi dudukan dengan menggerakkan tongkat analog, dudukan bergerak ke arah tempat tongkat berada menunjuk//sampai batas dan tetap di sana//Lihat surtrtech.com untuk informasi lebih lanjut#include //Servos library dan deklarasiServo myservo1;Servo myservo2;int a,b,X,Y; //Variabel yang dibutuhkan laterint YAxis =1; //Mendeklarasikan di mana sumbu X dan sumbu Y dari pin joystick adalah wiredint XAxis =0; //Tentu saja input analog batalkan setup() { Serial.begin(9600); //Mengatur baude rate monitor Serial dan meluncurkan pinMode(XAxis, INPUT); // Mendeklarasikan mode pin dan pin servo myservo1.attach(8); pinMode(YAxis, INPUT); myservo2.attach(9);}void loop() { a=myservo1.read(); //Membaca posisi servo sebelumnya merupakan langkah penting sehingga kita dapat mengetahui di mana posisinya selanjutnya b=myservo2.read(); X=analogRead(XAxis);//Membaca nilai joystick Y=analogRead(YAxis); if(X>550){ //Di sini kita tidak melakukan kalibrasi apapun sehingga joystick memiliki tiga posisi (Kiri|Istirahat|Kanan) a=a-1; //itu tergantung pada nilai yang kita baca kita bisa tahu ke arah mana tongkat itu menunjuk dan saya meninggalkan posisi istirahat yang besar sebenarnya itu hanya 1 nilai myservo1.write(a); //kami menyuntikkan nilai baru delay(50); //Anda dapat membuat penundaan besar atau pendek atau bertindak berdasarkan a=a-x untuk membuat langkah besar atau langkah pendek } if(X<450){ a=a+1; //Di sini kita melakukan operasi kebalikan untuk pindah ke arah berlawanan myservo1.write(a); penundaan (50); } if(Y>600){ //Di sini kita tidak melakukan kalibrasi apapun sehingga joystick memiliki tiga posisi (Atas|Istirahat|Bawah) ditto b=b+1; myservo2.write(b); penundaan (50); } jika(Y<450){ b=b-1; myservo2.write(b); penundaan (50); }
Skema
Ada servo atas dan servo bawah jangan bingung