

Proses manufaktur

Manufaktur industri
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 2 | ||||
| × | 2 | ||||
| × | 1 | ||||
| × | 2 | ||||
 |
| × | 10 | |||
 |
| × | 1 | |||
| × | 1 |


Deskripsi
Kontrol teleskop berbasis Arduino mandiri pertama di dunia Goto.
Semua kontrol teleskop sumber terbuka yang tersedia menggunakan Raspberry Pi, yang menghabiskan banyak daya, atau menggunakan Arduino sebagai ekstensi ke komputer, ponsel pintar, atau tablet. rDUINOScope adalah perangkat pertama yang berdiri sendiri berbasis Arduino yang memungkinkan astronom amatir menikmati langit malam.
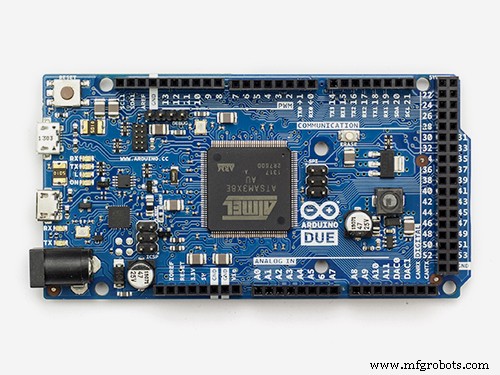
Ide awalnya adalah untuk membuat alternatif yang murah dan mudah dibuat dari produk GOTO yang tersedia secara komersial seperti yang diproduksi oleh SkyWatcher, Orion, Vixen, dan lainnya. Dengan demikian arsitektur perangkat keras dibangun di atas papan Arduino DUE dan sensor murah tersedia di pasaran. Petunjuk tentang cara membuat dan panduan pengguna dibuat di situs web proyek. Di jantung sistem terdapat papan Arduino DUE, yang sarat dengan perangkat lunak yang terus dikembangkan untuk menambah fungsionalitas.
rDUINOScope dengan Stellarium:
Detail
rDUINOScope adalah open source, Arduino Due-based Telescope Control System (GOTO). Dirancang sebagai sistem yang berdiri sendiri, rDUINOScope tidak memerlukan PC, tablet atau ponsel, atau koneksi Internet untuk mengoperasikan dan memberikan pemandangan yang menakjubkan!
Pada dasarnya ia memiliki database dengan 250 objek bintang TERBAIK (Katalog Messier dan Harta Karun Tersembunyi) dan 200 bintang , menghitung posisi mereka di langit dan mengarahkan teleskop. Prosedur penyelarasan yang diterapkan memungkinkan pengalaman "selalu dalam lensa mata" saat meluncur ke objek yang dipilih dan begitu objek berada di lensa mata, sistem akan terus melacaknya.
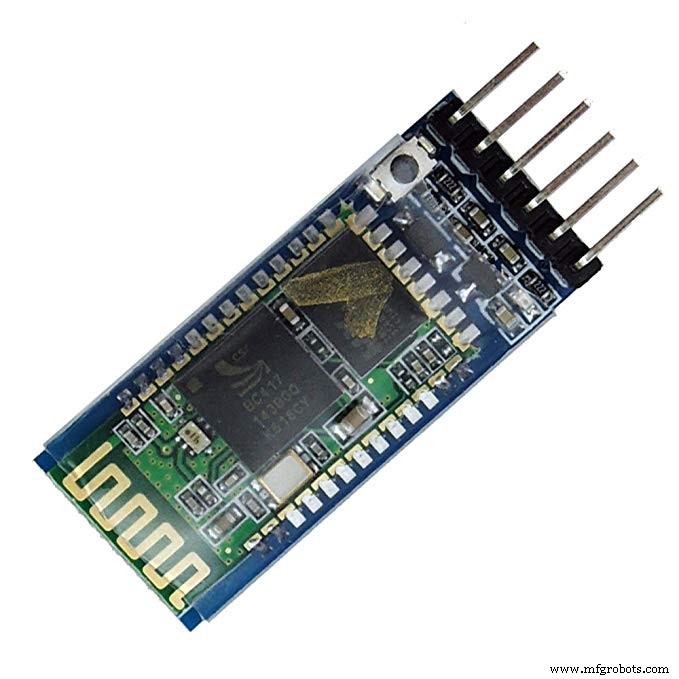
Namun, jika Anda ingin memanfaatkan perangkat elektronik Anda, #rDUINOScope menggunakan komunikasi Bluetooth (penyiapan tanpa kabel) untuk terhubung dengan semua perangkat elektronik dan menerima perintah berdasarkan protokol komunikasi MEADE LX200.
Sistem ini bekerja dengan motor stepper dari semua jenis dan dapat dipasang pada Mount DIY atau produk yang tersedia secara komersial seperti SkyWatcher, MEADE, Orion, Vixen, dan lain-lain.
Fungsi:
Apa yang ada di dalam rDUINO SCOPE?
rDUINOScope Github
Buat petunjuk
LANGKAH 1 Persiapan
Sebelum kita mulai, penting bagi Anda untuk memahami cara kerja perangkat lunak agar dapat membuat perubahan dan menyesuaikannya untuk Anda. Bagaimanapun, ini adalah salah satu kekuatan paling signifikan dari proyek ini!
Untuk memahami bagian ini, Anda perlu mengunduh kode dari File Proyek, bersama dengan file "libraries" ... atau cukup unduh keseluruhan paket dari: http://rduinoscope.co.nf/downloads.php . Semua nomor baris yang dirujuk sesuai dengan kode V2.1. Boiana EQ
Anda harus tahu cara kerja kode Arduino. Biasanya program Arduino memiliki 2 bagian- SETUP(); dan LOOP(); SETUP() dijalankan pada awal program dan pada dasarnya menggunakan sistem; LOOP() adalah fungsi loop konstan yang menyala beberapa kali per detik. Jadi untuk memastikan kita memiliki layar, input sentuh dan lain-lain dan layar tidak berkedip karena LOOP() kita perlu menciptakan mekanisme untuk memberi tahu Arduino apa yang diharapkan Pengguna lakukan. Jadi di bagian LOOP() Anda akan melihat bagian yang sangat kecil dari kode yang hanya mengatakan "Pertimbangkan Sentuh.. atau Pertimbangkan Waktu ..." dan lain-lain. Sisa aktivitas terjadi dalam fungsi-fungsi yang memungkinkan kita untuk mengubah aliran program sehingga layar tidak disegarkan beberapa kali per detik.
Perhitungan :Saya telah menggunakan beberapa informasi yang ditemukan di internet tentang cara menghitung posisi objek bintang. Sebagian besar informasi yang saya kumpulkan dari tautan berikut:http://www.stargazing.net/kepler/altaz.html - Menjelaskan rumus dan pendekatan yang diperlukan untuk menghitung Sudut Jam (HA), mengetahui lokasi, waktu saat ini, dan objek bintang RA dan DES.
Setelah saya membuat kode untuk menghitung HA /row 678:void countLST_HA() / , saya menggunakan halaman ini untuk memeriksa apakah itu berfungsi dengan baik:http://www.jgiesen.de/astro/astroJS/siderealClock/ , dan pada tahap selanjutnya ketika saya menambahkan DB dengan Objek Messier saya menggunakan Stellarium (http:// www.stelarium.org/) aplikasi untuk pemeriksaan yang sama.
Masalah utama yang saya temukan bukanlah rumus itu sendiri, tetapi cara Arduino menangani tipe variabel dan khususnya ketepatan perhitungan.
Sekarang setelah kita memiliki HA dan DEC yang dihitung untuk objek tertentu, kita ingin membuat titik pemasangan teleskop dan untuk melakukannya, kita perlu mengetahui seberapa banyak tepatnya motor perlu berputar. Untuk berhasil dalam hal ini, saya perlu mengetahui apa rasio cacing terhadap roda gigi – yaitu berapa banyak putaran yang harus dilakukan cacing agar roda gigi membuat 360°. Saya memiliki Vixen Super Polaris dan pencarian cepat di internet mengungkapkan bahwa ia menggunakan 144 gigi gigi untuk poros RA dan DEC. Saya telah membuat file Excel sederhana (*.XLS - http://rduinoscope.co.nf/downloads/Gears_Stepper_Calculation.xlsx) untuk menghitung berapa banyak motor harus berputar setelah saya menghitung HA dan DEC, dan juga seberapa sering "menyala" " motor untuk mengimbangi rotasi Bumi.
Gears_Stepper_Calculation.xlsxModel matematika yang sama yang saya gunakan di XLS juga diimplementasikan dalam kode, jadi yang perlu Anda lakukan hanyalah mengganti nilai untuk mount Anda di awal kode (baris 34 hingga 37).
// HERE GOES THE Mount, Gears and Drive information.// ... digunakan untuk menghitung rasio HourAngle ke microSteps// UPDATE BAGIAN INI sesuai dengan SET-UP Anda// ------ --------------------------------------------------// NB:RA dan DEC menggunakan gear yang sama rasio (144 gigi dalam kasus saya)!//--------------------------------------- -------int WORM =144;int REDUCTOR =4; // pengurangan gigi 1:4di DRIVE_STP =200; // Drive stepper memiliki 200 langkah per revolusiint MICROSsteps =16; // Saya akan menggunakan mode 1/16 microsteps untuk mendorong sidereal - juga menentukan kecepatan TERENDAH. Sekarang setelah kami menghitung rasio, kode akan tahu berapa banyak untuk memutar motor untuk mengarahkan teleskop ke koordinat yang sesuai dan juga berapa kecepatan jam sehingga mount dapat melacak objek. Fungsi yang menangani hal di atas dimulai pada baris 906 dan baris 917:
void Sidereal_rate(){}void cosiderSlewTo(){} Pertimbangan :Anda tahu, ini bukan produk siap pakai. Ini memungkinkan Anda untuk menyesuaikannya untuk kebutuhan Anda dan karenanya sangat fleksibel, tetapi dengan fleksibilitas itu ada beberapa kelemahan. Saya telah menyertakan bagian "pertimbangan" ini untuk memastikan hal itu tidak dihapus dari daftar Tugas Anda.
if (SLEW_RA_microsteps> RA_microSteps){ digitalWrite(RA_DIR,STP_BACK); digitalWrite(RA_STP,TINGGI); digitalWrite(RA_STP,RENDAH); RA_microSteps +=RA_mode_steps;}else{ digitalWrite(RA_DIR,STP_FWD); digitalWrite(RA_STP,TINGGI); digitalWrite(RA_STP,RENDAH); RA_microSteps -=RA_mode_steps;} TINDAKAN: Revisi bagian kode berikut:void mempertimbangkan_Manual_Moveint xP, int yP ), void cosiderSlewTo() dan membatalkan Sidereal_rate().
Rencanakan aktivitas Anda: Sekarang kami mencapai titik di mana kami perlu merencanakan kegiatan kami untuk benar-benar membangun sistem rDUINO Scope GoTo. Perkiraan kasarnya adalah Anda harus dapat menyelesaikan sistem dalam 2-3 hari mengingat Anda memiliki semua yang dibutuhkan (HW, Alat dan Bahan). Butuh waktu sekitar 4-5 bulan untuk menyelesaikannya, mengingat saya hanya bisa bekerja di malam hari (tidak setiap malam), dan juga saya perlu melakukan banyak riset. Menyatukan semuanya membuat saya seperti:
LANGKAH 2 Bahan
Sekarang, seperti yang kita ketahui cara kerja program pada dasarnya, Anda perlu merencanakan pengadaan dan mendapatkan bahan yang dibutuhkan.
Bill of Material :Sebagian besar bahan yang saya gunakan dibeli dari pemasok Cina di Internet. Beberapa dari mereka namun saya memutuskan untuk membeli secara lokal sebagian besar karena mereka dianggap baik untuk dimiliki dan saya ingin menghindari penundaan:GPS, Bluetooth dan Joystick. Harganya kira-kira $190 USD untuk mendapatkan semua ini, jadi itu benar-benar biaya rendah dibandingkan dengan betapa mahalnya membeli sistem seperti itu dari produsen. Anda dapat menemukan daftar bahan beserta harganya dan di mana Anda dapat membelinya di situs web proyek:http://rduinoscope.co.nf/rDUINO_step2.html, tetapi daftar tersebut juga tersedia di situs web ini di bagian "KOMPONEN" .
Jika Anda dapat menemukannya lebih murah atau mengirimkannya lebih cepat, saya sangat menyarankan Anda melakukannya.
Selain itu, tergantung pada desain Anda, Anda mungkin membutuhkan 40 pin. kabel dengan konektor untuk TFT, beberapa baut plastik untuk mengencangkan joystick, kabel USB untuk memastikan Arduino Due masih dapat diprogram saat disertakan dalam kotak, kipas, dan lain-lain.
Jika Anda tidak memilikinya di rumah (seperti yang tidak saya miliki), Anda juga harus membeli beberapa bahan solder, solder, jepit, multimeter digital, dan lain-lain.
Perangkat lunak yang Anda perlukan :Salah satu bagian penting dalam membangun rDUINOScope Anda adalah mengunduh dan menginstal Arduino IDE dan semua Perangkat Lunak terkait (driver, definisi papan, dan pustaka). Ikuti daftar di bawah ini untuk menginstal yang diperlukan di komputer Anda:
Anda sekarang harus dapat mengkompilasi kode dan memuatnya ke papan Arduino Due setelah menghubungkan Arduino ke Komputer Anda.
Catatan: Jika Anda tidak mengetahui cara kerja Arduino IDE dan apa yang perlu dilakukan untuk memprogram Arduino, lihat situs web dan tutorialnya:https://www.arduino.cc/en/Tutorial/HomePage
LANGKAH 3 Merakit
Untuk petunjuk lebih rinci, silakan kunjungi Situs Web Proyek:http://rduinoscope.co.nf/rDUINO_step3.html
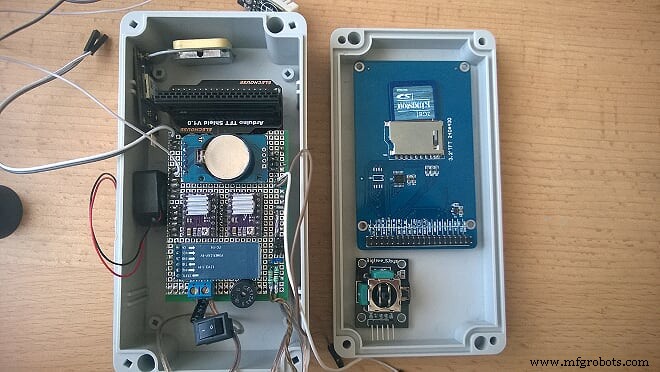
Sekarang saatnya untuk membuat papan Perisai. Papan Shield adalah papan dengan pinouts yang Anda susun di atas papan ArduinoDUE. Beberapa komponen harus berada di papan itu dan beberapa ditempatkan lebih baik di kotak enklosur. Perpisahan saya seperti ini:
Cara menyambungkan komponen ke papan ARDUINO DUE:
Komponen .... Pin Perangkat Keras .... Pin Arduino
GPS
RTC
Bluetooth
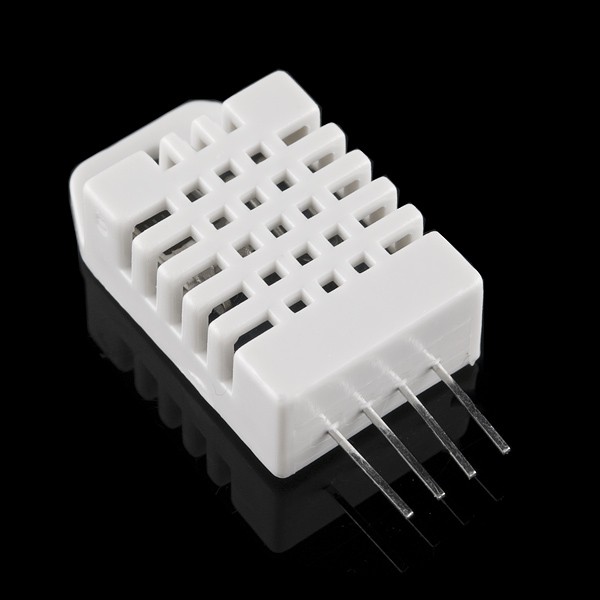
DHT
Pembicara
PS2
Deklinasi DRV8825
Pendakian Kanan DRV8825
Layar TFT
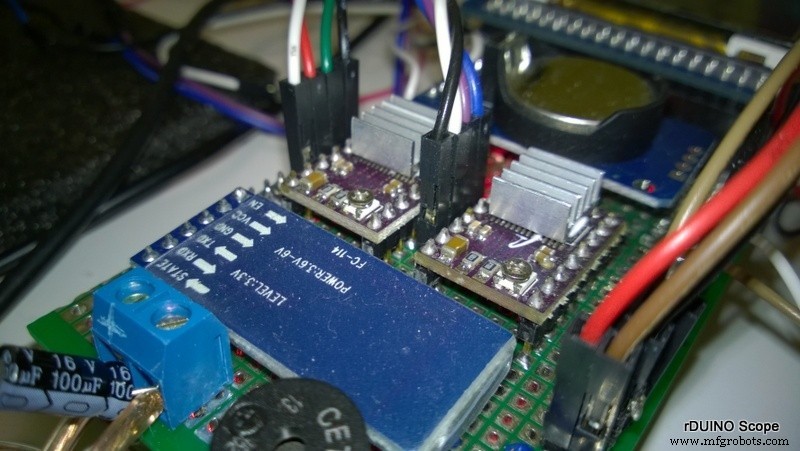
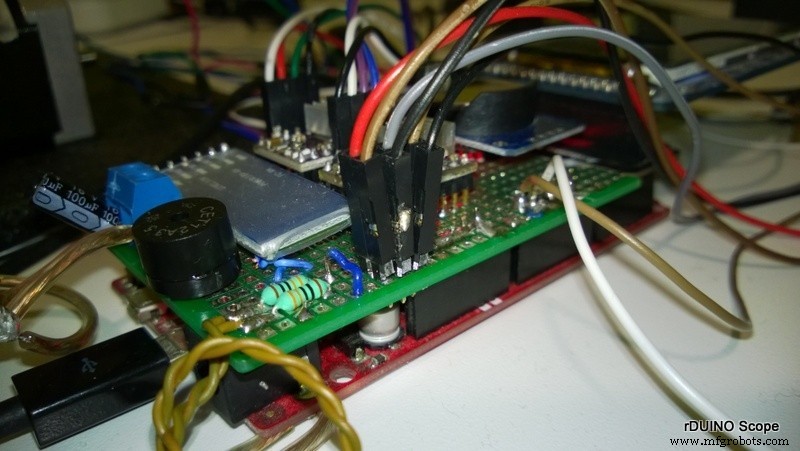
Benar... Sekarang kita siap untuk merakit Papan Perisai. Dapatkan PCB prototyping dan nilai cara memotongnya, sehingga dapat menampung semua komponen untuk memiliki ruang untuk kabel dan memiliki pinout yang disolder sedemikian rupa sehingga dapat ditumpuk di atas Arduino. Harap dicatat bahwa Anda perlu menyolder semua pin yang digunakan oleh Arduino dan menghubungkannya baik ke komponen pada papan Perisai atau ke konektor pada papan pelindung ini sehingga komponen yang dimasukkan ke dalam kotak itu sendiri juga dapat dihubungkan.
Saya menyertakan beberapa foto di bawah proses:
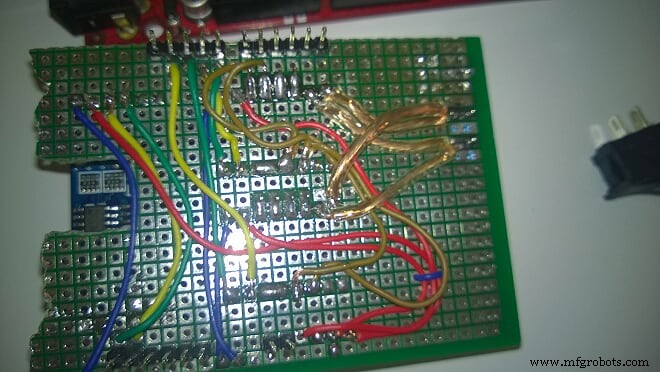

Setelah selesai, saya menghubungkan papan dan menguji perisai! Tidak berfungsi! :( Saya memeriksa kabel dan ternyata saya telah membuat jembatan antara 2 koneksi dan saya harus memperbaikinya. Harap dicatat bahwa pada saat ini saya mulai memeriksa setiap penyolderan untuk masalah karena saya benar-benar beruntung tidak membakar Arduino saya atau apa pun dengan kabel yang salah. NB:Pastikan Anda memeriksa semua koneksi! Pastikan Anda mengikuti diagram pengkabelan berikut untuk DRV8825 dan drive motor karena ini penting.
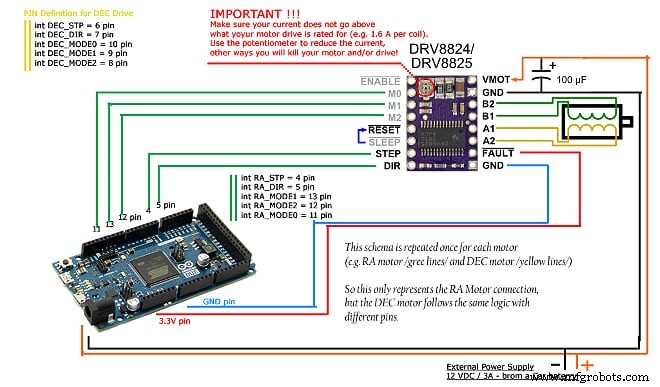
Pastikan Anda menggunakan adaptor daya yang sesuai (12V, 1.6A) dan sambungkan drive motor sebelum daya ON! NB:Jangan pernah menghubungkan drive motor saat DRV8825 sedang dimuat karena dapat membakar driver!
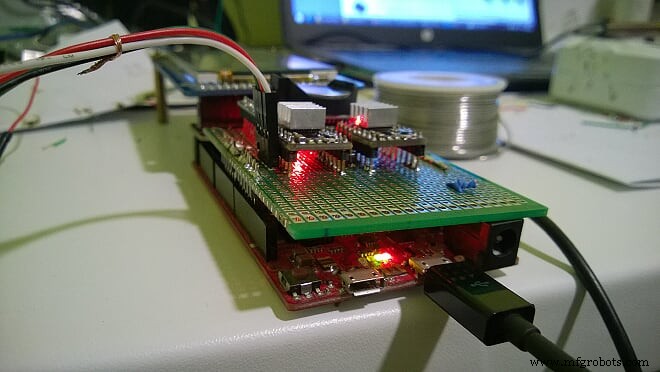
Sekarang karena semua komponen telah disolder di tempatnya, saya sarankan Anda juga menghubungkan drive motor, memuat perangkat lunak ke papan Arduino dan menguji seluruh pengaturan. Seharusnya berfungsi tanpa gangguan pada saat ini.
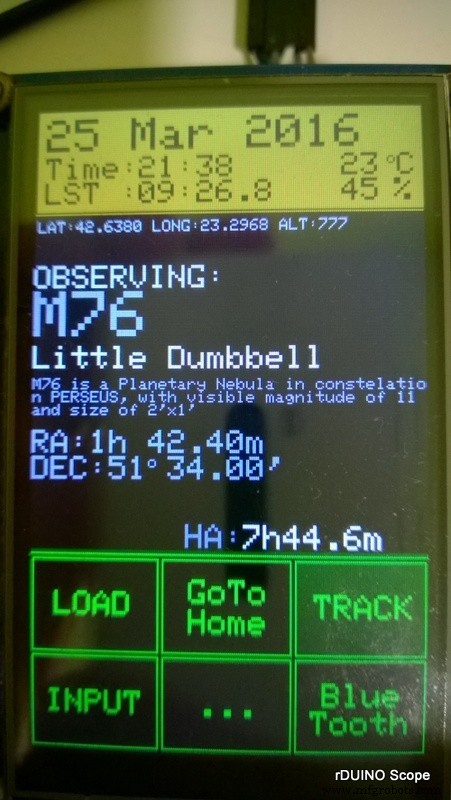
Anda sekarang harus dapat bermain-main dengan perangkat lunak dan mengenal Antarmuka Pengguna. Untuk membantu antarmuka, saya telah membuat halaman PANDUAN PENGGUNA di situs web proyek:http://rduinoscope.co.nf/guide.html
Pengaturan Anda akan terlihat seperti ini:

LANGKAH 4 Kotakkan bersama
Setelah papan pelindung siap, ambil kotak dan mulailah meletakkan semua komponen yang tersisa dan rencanakan di mana Anda perlu mengebor lubang dan apa bentuk dan ukurannya. Cara terbaik untuk memotong lubang adalah dengan pisau saku kecil (setidaknya untuk saya). Tidak masalah apakah itu lubang bundar atau persegi. Anda dapat dengan mudah mengukirnya dengan pisau kecil yang tajam.
Satu-satunya pengecualian adalah untuk layar di mana Anda benar-benar membutuhkan lubang yang panjang, rata, dan persegi. Saya meminta bantuan dan ayah saya melakukannya di mesin pemotongnya.
Setelah Anda puas dengan tata letak dan menganggapnya bisa dilakukan, mulailah memotong lubang. Ini adalah proses yang panjang dan menciptakan beberapa kekacauan, tetapi seharusnya tidak memakan waktu lebih dari 2-3 jam. Kadang-kadang saya menggunakan bor ketika saya harus membuat lubang yang dilingkari, misalnya:konektor catu daya 12V, konektor motor RA dan DEC.
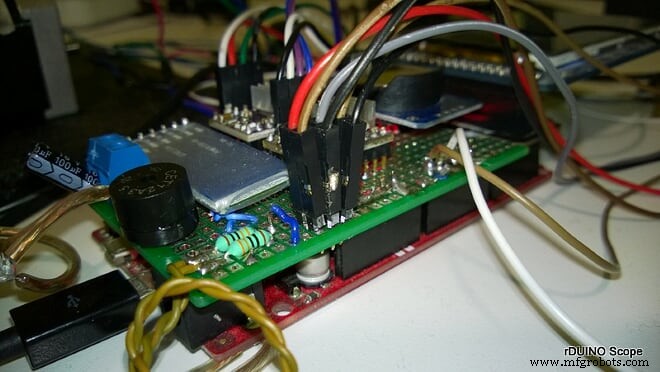
Siapkan pistol lem panas Anda dan mulailah menempelkan komponen panas ke kotak seperti yang ditunjukkan di bawah ini:




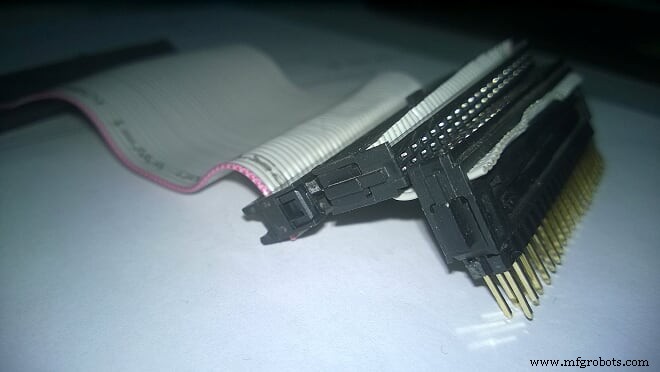
Sekarang semua sudah terhubung dan terkotak, kecuali komponen di muka depan boks. Saya telah memutuskan untuk meletakkan di sana Layar TFT, Joystick PS2 dan sakelar Mode Siang/Malam. Ketika saya sampai ke Layar TFT saya membuat koneksi kabel pita sederhana dengan konektor laki-laki dan perempuan dan menghubungkannya ke layar. Namun ini tidak berhasil! Alasannya adalah bahwa pin dicerminkan dan layar TFT tidak dapat berfungsi lagi. Jadi saya memutuskan untuk mengerjakan beberapa konversi 2D ke 3D yang rumit dan mengerjakan konektor yang saya miliki dengan kabel pita untuk menyelesaikan masalah
Cerita panjang, pendek: Ini bukan ilmu roket, tetapi memberi saya masa-masa sulit sampai saya menemukan solusi. Solusi yang jelek, tetapi berhasil dan masih berfungsi setahun kemudian. Di bawah ini Anda dapat melihat apa yang saya maksud.
Pada dasarnya apa yang Anda lihat di sini adalah:

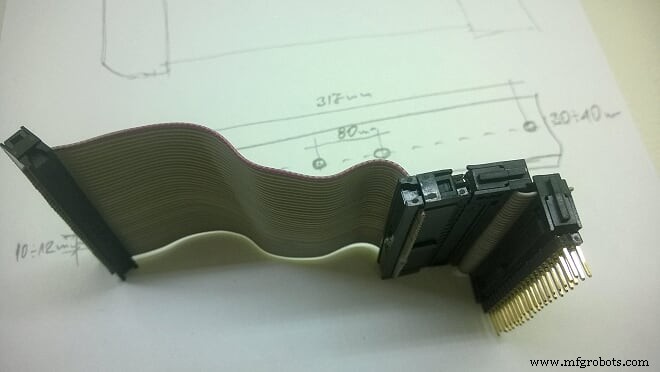
Itu bekerja seperti pesona dan memungkinkan saya untuk menyelesaikan kotak!






LANGKAH 5 Gunung Khatulistiwa Jerman
Sekarang sebanyak saya ingin berbagi dengan Anda bagaimana menghubungkan drive motor ke mount Anda, saya tidak bisa. Faktanya adalah setiap pabrikan membuat desain mereka sendiri dan karena itu, tidak ada solusi yang cocok untuk semua.
Saya menggunakan Vixen Super Polaris dari tahun 80-an dan metode di bawah ini berhasil. Saya perlu mengingatkan Anda bahwa keputusan yang Anda ambil dalam LANGKAH 1 di mana Anda perlu mengubah nilai dalam kode sekarang akan memengaruhi pekerjaan kami. Di bawah ini Anda dapat melihat pengaturan puli dan sabuk saya.
Saya membeli 2 set untuk setup saya. Saya hanya tidak yakin bagaimana cara kerjanya dan dengan demikian membeli satu set dengan reduksi 1:4 dan satu set dengan reduksi 1:3. Ukuran sabuk juga harus berbeda karena pengurangan mempengaruhi jarak antara kedua puli. Saya akui bahwa dengan perencanaan dan desain yang baik Anda dapat memutuskan di muka bagaimana melanjutkan dan menyisihkan sejumlah uang, tetapi saya sedang terburu-buru. Saya perlu membuatnya bekerja!

Setelah memiliki sabuk, katrol, dan dudukan di depan saya, saya memutuskan bahwa pendekatan terbaik bagi saya adalah menggunakan reduksi 1:4 karena semuanya tampak pas di dudukan dan saya mulai mengerjakan rumah motor. Setelah setengah hari, saya dapat menemukan ini:
Saya menguji seluruh pengaturan dan harus membuat beberapa perubahan pada perangkat lunak (memperbarui nilai variabel ke 4 pada baris 35) sehingga mewakili keputusan desain akhir saya. Mengujinya lagi dan semuanya bekerja sebagai pesona.


Saya harus menunggu malam berbintang yang bagus untuk mengujinya dengan benar, tetapi sampai saya menunggu, saya menyadari bahwa ada sesuatu yang tidak beres!
Saya memiliki sistem GOTO Kontrol Teleskop terbaik, jauh lebih baik daripada yang dapat saya beli dengan anggaran hobi saya, tetapi tampaknya tidak benar. Dibutuhkan beberapa sentuhan akhir, sesuatu yang kemudian membuat saya bangga dengan rDUINOScope saya!
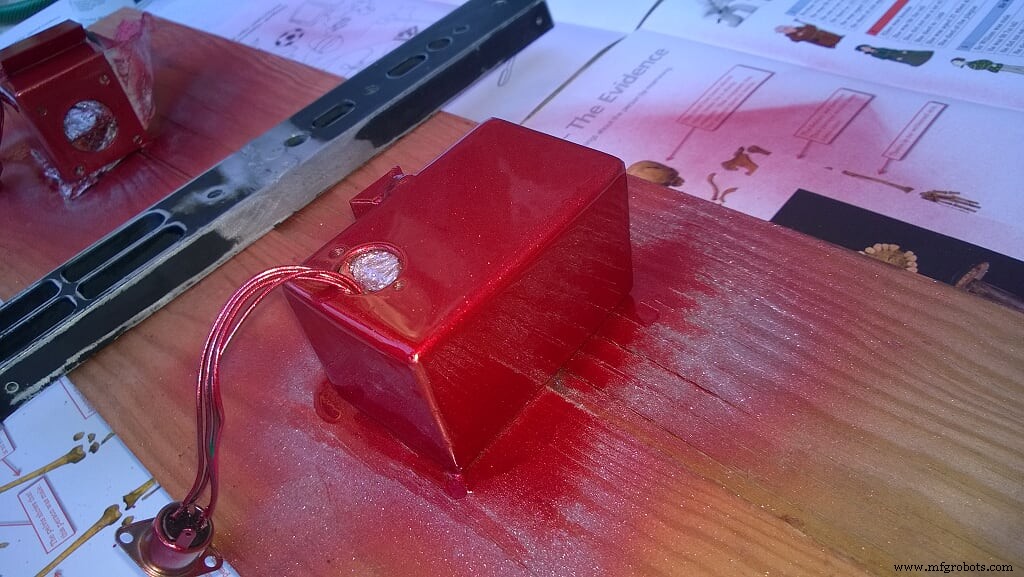
Akhirnya, rDUINOScope Vixen SP Ferrari saya terlihat seperti yang saya rasakan!


File
_READ_ME.txt:Deskripsi rilis final v.2.1 Boiana EQ bersama dengan beberapa F.A.Q.
_READ_ME.txt_02_Boiana_EQ.ino:File Arduino Utama
_02_Boiana_EQ.inographic_screens.ino:FILE GRAPHICS - ditautkan ke file utama
graphic_screens.inotouch_inputs.ino:SENTUH FILE INPUT - ditautkan ke file utama
touch_inputs.inoBT.ino:KOMUNIKASI BLUETOOTH - ditautkan ke file utama
BT.inoregular_updates.ino:PEMBARUAN WAKTU - ditautkan ke file utama
regular_updates.ino
// HERE GOES THE Mount, Gears and Drive information.// ... digunakan untuk menghitung rasio HourAngle ke microSteps// UPDATE BAGIAN INI sesuai dengan SET-UP Anda// --------- ------------------------------------// NB:RA dan DEC menggunakan gear ratio yang sama (144 gigi dalam kasus saya)!//------------------------------------------- ----int WORM =144;int REDUCTOR =4; // pengurangan gigi 1:4di DRIVE_STP =200; // Drive stepper memiliki 200 langkah per revolusiint MICROSsteps =16; // Saya akan menggunakan mode 1/16 microsteps untuk mendorong sidereal - juga menentukan kecepatan TERENDAH.
if (SLEW_RA_microsteps> RA_microSteps){ digitalWrite(RA_DIR,STP_BACK); digitalWrite(RA_STP,TINGGI); digitalWrite(RA_STP,RENDAH); RA_microSteps +=RA_mode_steps;}else{ digitalWrite(RA_DIR,STP_FWD); digitalWrite(RA_STP,TINGGI); digitalWrite(RA_STP,RENDAH); RA_microSteps -=RA_mode_steps;} 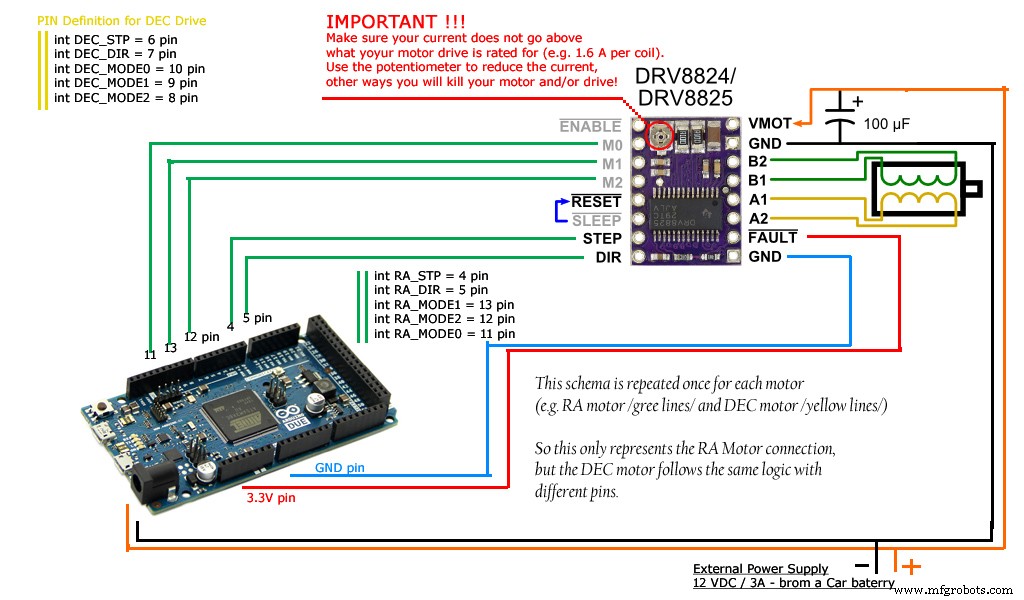 Cara menyambungkan semua sensor dan menghubungkan ke Arduino DUE
Cara menyambungkan semua sensor dan menghubungkan ke Arduino DUE 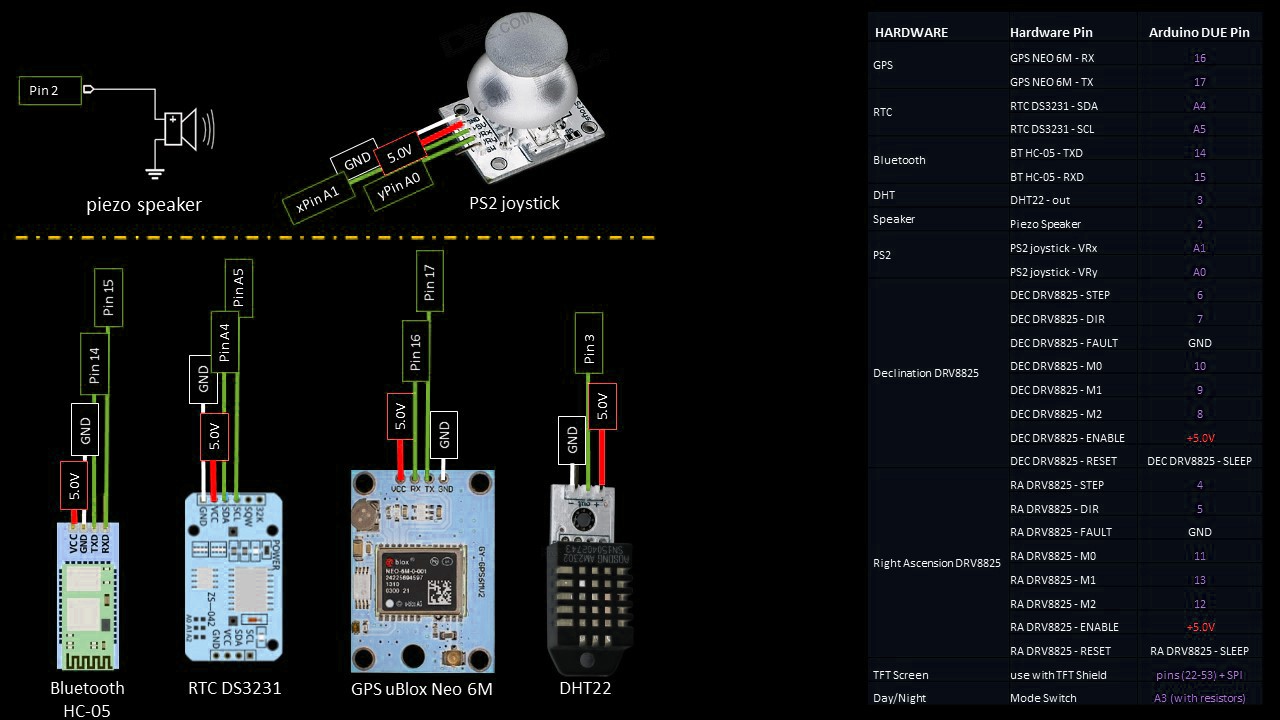
Proses manufaktur
Dalam tutorial ini kita akan mempelajari cara membuat komunikasi nirkabel antara dua papan Arduino menggunakan nRF24L01 modul transceiver. Modul nRF24L01 adalah pilihan yang sangat populer untuk komunikasi nirkabel saat menggunakan Arduino. Saya telah menggunakan modul ini untuk banyak proyek Ardui
Dalam tutorial Arduino ini kita akan belajar bagaimana menggunakan modul komunikasi serial nirkabel HC-12 yang mampu melakukan komunikasi nirkabel jarak jauh antara beberapa papan Arduino, dengan jarak hingga 1,8km. Anda dapat menonton video berikut atau membaca tutorial tertulis di bawah ini untuk
Dalam Tutorial Bluetooth Arduino ini kita akan belajar bagaimana menggunakan modul HC-05 untuk mengendalikan Arduino melalui komunikasi Bluetooth. Anda dapat menonton video berikut atau membaca tutorial tertulis di bawah ini untuk lebih jelasnya. Ringkasan Untuk tutorial kali ini saya membuat dua
Modul Joystick Apakah Anda saat ini menangani proyek yang berkaitan dengan gerak dan robotika? Kemudian, ada kemungkinan Anda pernah mendengar tentang modul Arduino Joystick, tetapi Anda tidak tahu cara membuatnya. Atau mungkin Anda ingin mendapatkan informasi lebih lanjut tentang cara kerja mod