

Proses manufaktur

Manufaktur industri
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 4 | ||||
| × | 4 | ||||
 |
| × | 8 | |||
 |
| × | 2 | |||
 |
| × | 8 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 |
 |
|
Perkenalan singkat
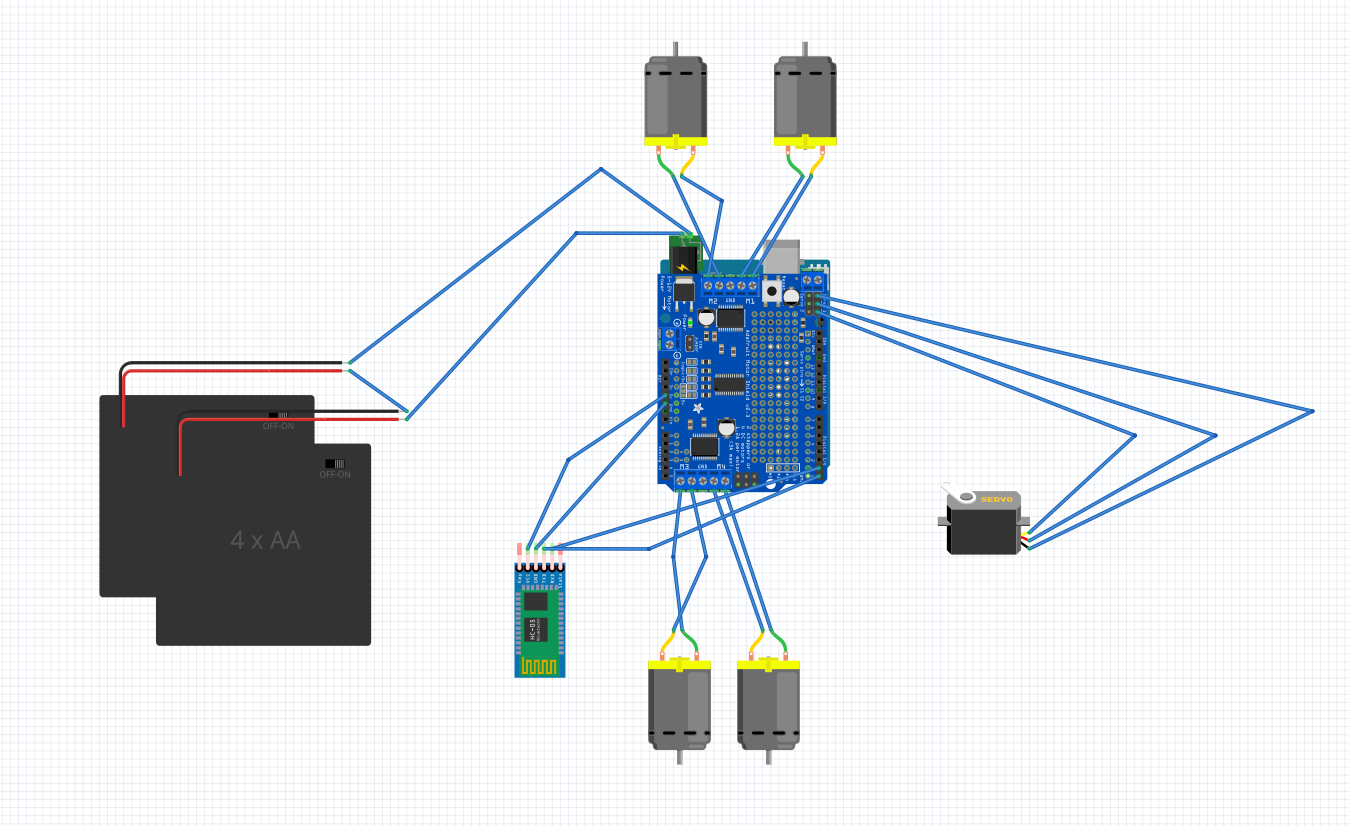
Ini adalah mobil roda empat sederhana yang dapat dikontrol melalui koneksi bluetooth. Mobil dapat menampung ponsel apa pun yang dapat digunakan sebagai kamera IP. Saya memutuskan untuk membuat robot ini dengan javascript menggunakan server web node di mana saya dapat memantau kemana robot itu pergi.
Anda dapat melihat rangkaian bagian utama pada gambar 1.
Setelah menjalankan server, saya mendapatkan layar yang berisi beberapa pengantar tentang pengontrolan dan jendela untuk tampilan kamera (gambar 2).
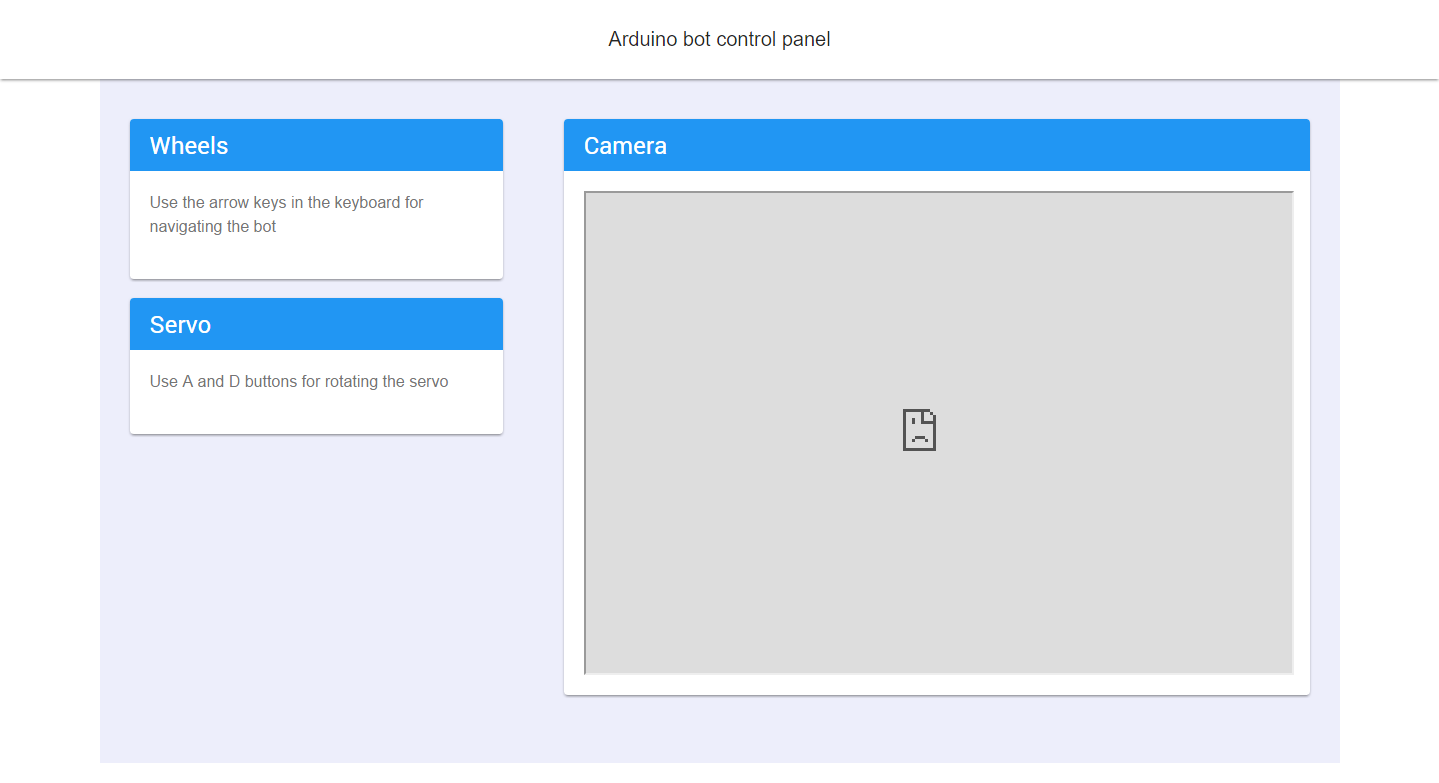
Dan ya, tata letak ini responsif.
Sasis
Dalam versi bot ini saya memutuskan untuk membuat sasis sendiri. Jika Anda tidak memiliki mesin bor atau hanya ingin solusi yang lebih mudah, Anda dapat membeli dari berbagai macam badan mobil plastik.
Saya pergi ke jalan untuk membuat sasis saya sendiri dan sepertinya tidak semudah itu. Aturan yang paling penting adalah Anda harus meletakkan ban sedekat mungkin satu sama lain jika Anda ingin memilih kemudi diferensial untuk berbelok. Anda dapat membaca kesalahan utama dan aturan fisika dasar di tautan berikut:
http://www.rakeshmondal.info/4-Wheel-Drive-Robot-Design
Tantangan lain adalah bagaimana memasang motor DC ke sasis. Dalam kasus saya, saya tidak punya bagian khusus untuk ini jadi saya memutuskan untuk memilih beberapa ikatan kabel (150/3,5) untuk tugas itu. Untuk memasang ban dengan benar, saya harus mengebor lubang setepat mungkin dan menggunakan 2 pengikat kabel untuk satu motor DC. Sayangnya, ada kemungkinan bahwa motor tidak akan cukup pas dan mobil Anda mungkin bergerak sedikit ke kiri atau ke kanan saat Anda mengontrol maju dan mundur.
Baterai
Untuk memberi daya pada papan dan motor, saya memutuskan untuk memilih satu catu daya DC untuk tugas tersebut. Sasis tidak memiliki ruang untuk dudukan baterai 8 x AA jadi saya harus membuat beberapa penyesuaian sehingga memasang dua dudukan 4 x AA dengan 2 sekrup satu sama lain. Untuk ini saya harus mengebor plastik juga.
Menghidupkan
Dalam kasus saya, saya memberi daya pada papan Arduino Uno dengan baterai isi ulang 8 x AA. Ini adalah daya yang cukup untuk melayani pelindung motor juga. Ada jumper pada pelindung ini yang dapat dilepas sehingga pelindung motor Anda tidak mendapatkan daya dari Arduino. Dalam hal ini Anda dapat memberi daya pada perisai Anda secara terpisah menggunakan pin daya di atasnya. Anda dapat membaca tentang opsi daya yang berbeda di tautan berikut:
https://learn.adafruit.com/adafruit-motor-shield-v2-for-arduino/powering-motors
Koneksi nirkabel
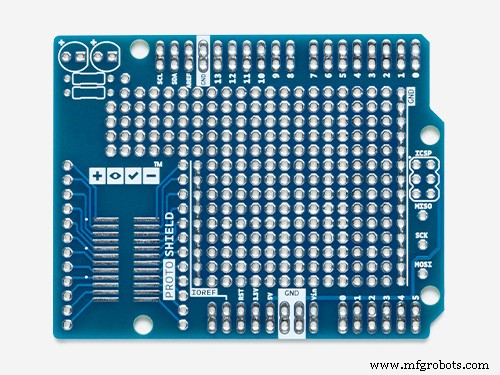
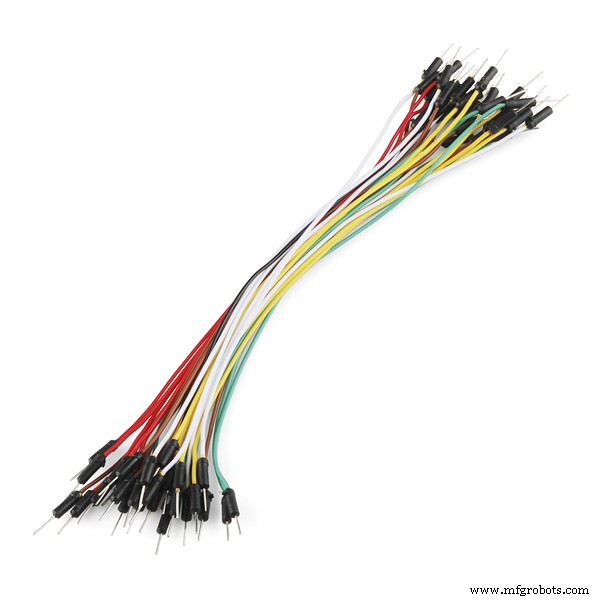
Saya menggunakan modul bluetooth HC-06 untuk membuat koneksi antara mobil dan komputer saya. Saya ingin menggunakan kabel sesedikit mungkin, jadi saya memutuskan untuk membuat pelindung Arduino khusus dengan meletakkan modul bluetooth dan mengosongkan pelindung prototipe, melakukan pengkabelan di bawah pelindung dan menyolder beberapa pin header untuk mekanisme pemasangan yang benar. Anda dapat melihat sekilas hasilnya pada gambar 3 dan gambar 4.
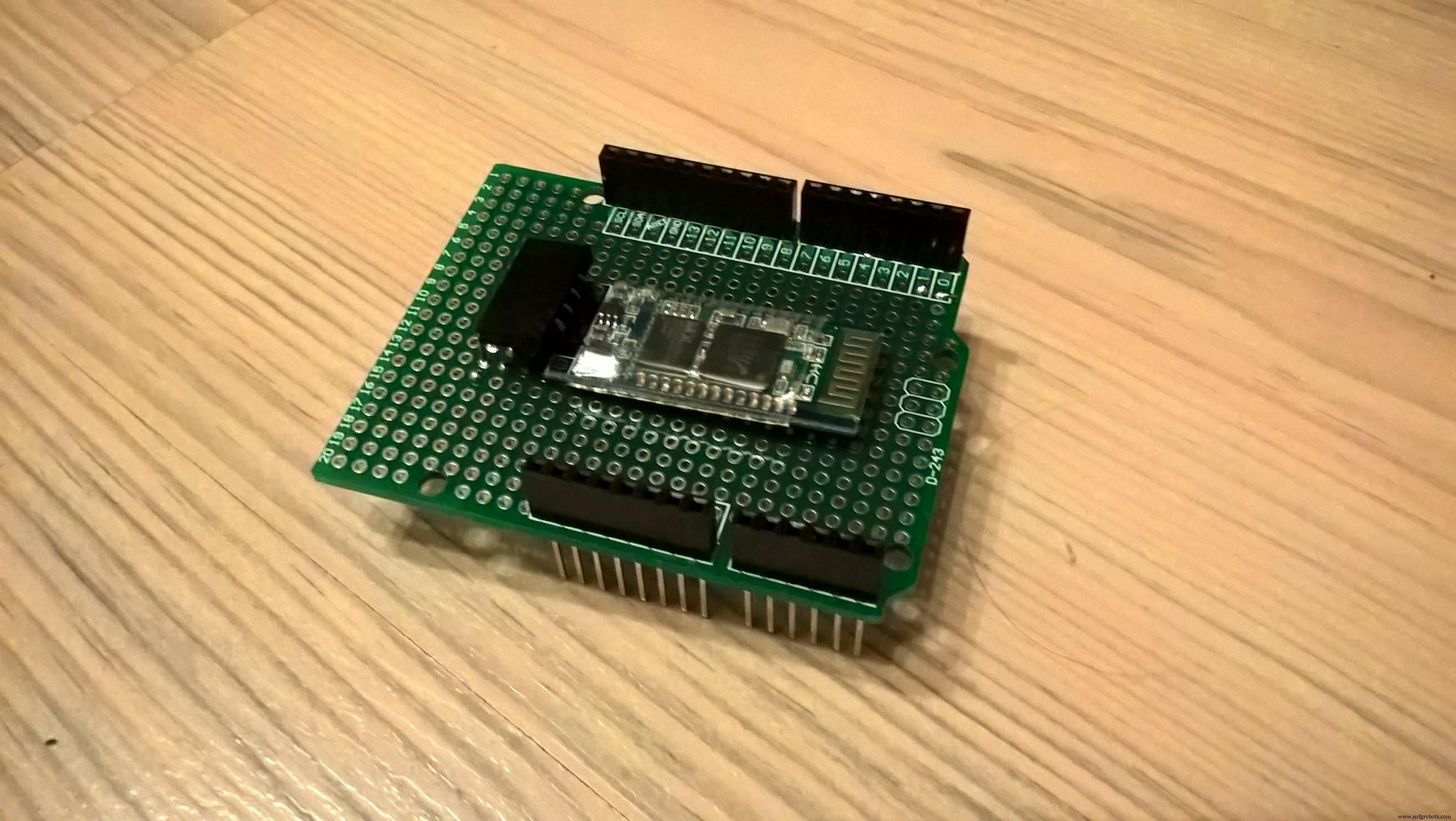
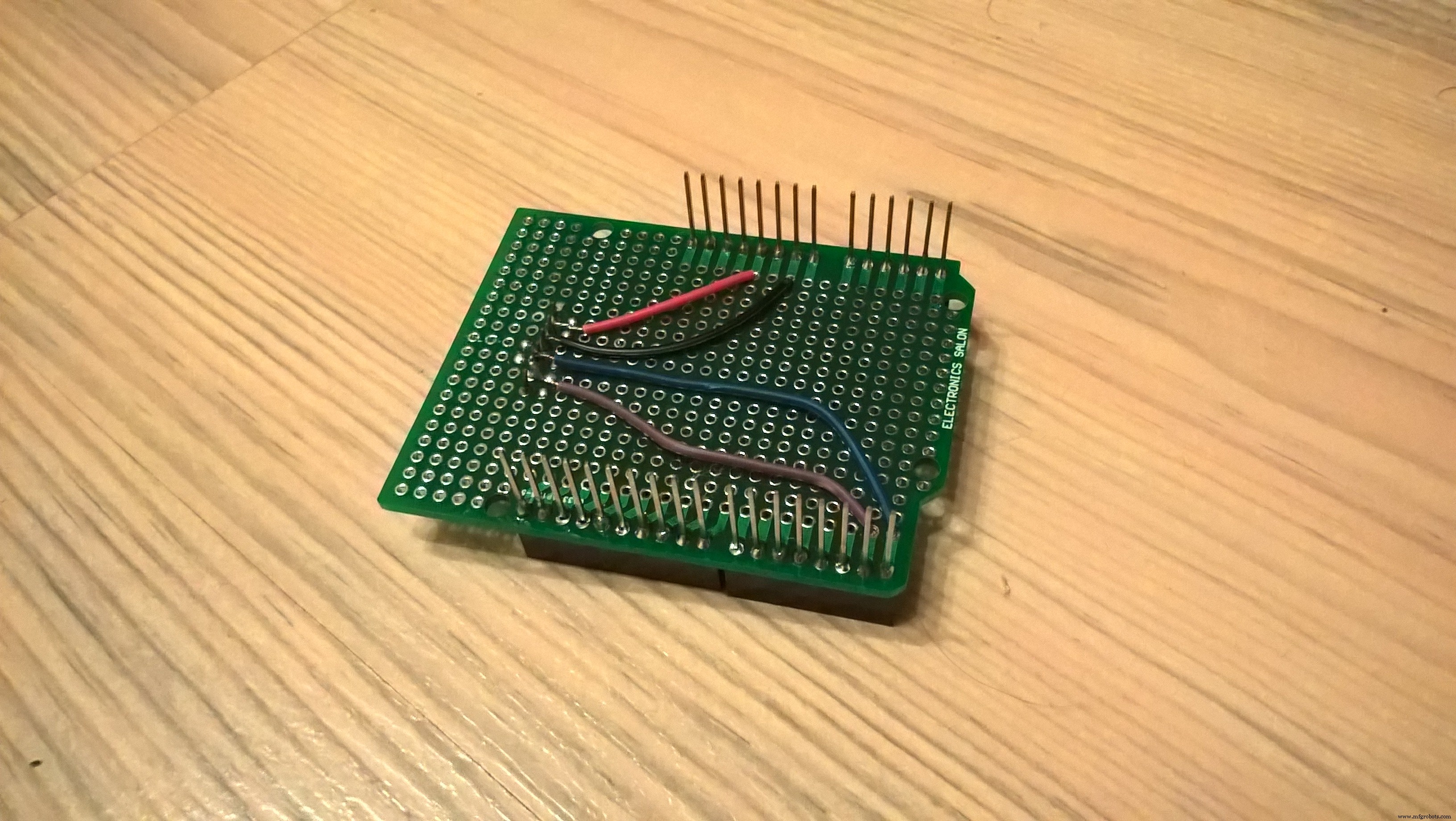
Hal baiknya adalah Anda memiliki kemampuan untuk melepaskan modul bluetooth dari pelindung kapan saja karena tidak disolder ke papan.
Untuk menyiapkan modul bluetooth, ikuti petunjuk dari situs ini:
https://github.com/rwaldron/johnny-five/wiki/Getting-Started-with-Johnny-Five-and-JY-MCU-Bluetooth-Serial-Port-Module
Gerakan
Robot mampu bergerak maju, mundur, dan berputar menggunakan kemudi diferensial. Dudukan kamera terpasang ke servo rotasi kontinu sehingga Anda dapat melihat-lihat dengan ponsel tanpa menggerakkan mobil itu sendiri. Anda dapat melihat demonstrasi singkat dalam video berikut.
Ponsel
Saya menggunakan Nokia Lumia 520 untuk proyek dan aplikasi Win IP Camera yang dapat Anda temukan di toko:
https://www.microsoft.com/en-us/store/p/win-ip-camera/9nblgggz4xb1
Tentang kode
Sebagai pengembang javascript, saya memutuskan untuk membuat server web node untuk halaman kontrol dan menggunakan beberapa perpustakaan mewah untuk tampilan dan nuansa serta peningkatan sintaks kode. Anda dapat melihat daftar lengkapnya di halaman github saya dan bagian selanjutnya.
Saya memutuskan untuk memilih modularisasi baik di frontend maupun backend. Berikut adalah titik masuk aplikasi:
var boardModule =require('./src/boardModule'), servoModule =require('./src/servoModule'), motorModule =require('./src/motorModule'); boardModule.initBoard().then(function() { motorModule.initMotors(); servoModule.initServo();}); Di sisi ujung depan saya juga menggunakan pemisahan untuk setiap modul:
import {moveWheels, stopWheels} dari './wheelsControl';import {moveServo, stopServo} dari './servoControl'; document.onkeydown =checkKeyDown;document.onkeyup =checkKeyUp; fungsi checkKeyDown(e) { moveWheels(e.keyCode); moveServo(e.keyCode);} fungsi checkKeyUp(e) { stopWheels(e.keyCode); stopServo(e.keyCode);} Untuk basis kode lengkap, periksa repositori github saya di atas.
Pustaka perangkat lunak
Kata-kata terakhir
Saya seorang pemula di dunia IoT ini dan ini adalah proyek pertama saya. Saya tidak ingin mengatakan bahwa saya menggunakan solusi optimal tetapi mudah-mudahan Anda dapat menemukan beberapa informasi yang berguna dari panduan ini.
Proses manufaktur
Komponen dan persediaan Arduino UNO × 1 PHPoC WiFi Shield untuk Arduino × 1 Seeed Servo Motor × 1 Kabel jumper × 1 Tentang proyek ini Pendahuluan Jika Anda pemula, saya sarankan membaca tentang Arduino - Servo Motor dan Arduino -.
Komponen dan persediaan Amazon Alexa Echo Dot × 1 Arduino UNO × 1 Espressif ESP8266 ESP-01 × 1 Arduino Proto Shield × 1 Arduino 4 Relay Shield × 1 Aqua Pump × 2 Lampu Tumbuh Tanaman × 1 Adaptor Daya DC 220V × 1 Ad
Umumnya, secara individual mengendalikan empat relai dalam pelindung relai membutuhkan kode Arduino. Perisai, pada gilirannya, membantu mengontrol perangkat berdaya tinggi. Perangkat termasuk kipas, bola lampu, strip LED, pompa, aktuator, dll. Perisai relai juga memiliki fitur luar biasa. Beberapa d
Membuat sirkuit pada platform perangkat keras sumber terbuka Arduino membutuhkan penggunaan perisai Arduino. Mereka membantu mengurangi kompleksitas perangkat keras dan kabel sirkuit pada proyek. Pada artikel ini, kita akan mempelajari apa itu Arduino Sheild, jenis-jenisnya, dan proses instalasinya.