Tentang proyek ini

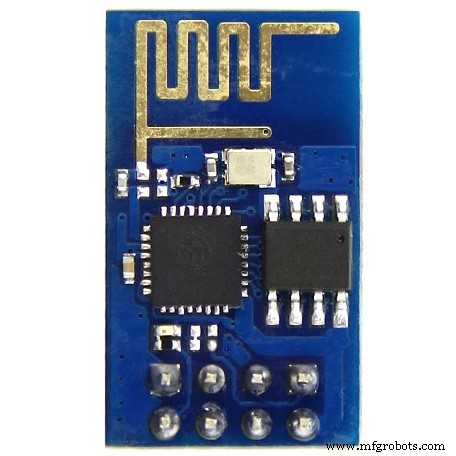
Tutorial ini menunjukkan bagaimana merancang robot rover roda dua yang dikendalikan dari jarak jauh melalui jaringan wi-fi, menggunakan Arduino Uno yang terhubung ke modul Wi-fi ESP8266 dan dua motor stepper. Robot dapat dikendalikan dari browser internet biasa, menggunakan antarmuka yang dirancang HTML. Ponsel cerdas Android digunakan untuk menyiarkan video dan audio dari robot ke antarmuka kontrol operator.
Ada banyak kit robot yang tersedia secara online dengan berbagai bentuk, dimensi, dan harga. Namun, tergantung pada aplikasi Anda, tidak ada yang cocok, dan Anda mungkin menemukan bahwa mereka terlalu mahal untuk eksperimen Anda. Atau mungkin Anda hanya ingin membuat struktur mekanik Anda daripada membeli yang lengkap. Tutorial ini juga menunjukkan bagaimana merancang dan membangun bingkai akrilik murah untuk proyek robot Anda sendiri, menggunakan alat biasa saja bagi mereka yang tidak memilikinya. akses ke printer 3D mahal atau pemotong laser. Sebuah platform robot sederhana disajikan.
Panduan ini mungkin disesuaikan untuk mengubah bentuk atau antarmuka kontrolnya. Itu diadaptasi untuk proyek robot saya lainnya ("Robô da Alegria"), yang dapat Anda periksa di tautan di bawah:
https://hackaday.io/project/12873-rob-da-alegria-...
https://github.com/ferauche/RoboAlegria
https://hackaday.io/project/12873-rob-da-alegria-...
[Peringatan:beberapa foto sudah usang, karena desainnya lebih ditingkatkan. Namun, ide yang disajikan di sini masih berlaku.]
Langkah 1:Alat 




Alat berikut diperlukan untuk konstruksi prototipe ini:
- Gergaji tangan (untuk melakukan pemotongan awal lembaran akrilik)
- Obeng (untuk penempatan baut dan mur)
- Penggaris (untuk pengukuran dimensi)
- Pisau serbaguna (untuk memotong lembaran akrilik)
- Mesin bor (untuk membuat lubang baut)
- Kamplas (untuk menghaluskan tepi yang kasar)
Langkah 2:Struktur dan bahan mekanis 








Untuk membuat robot kustom, pertama-tama Anda harus mendesain struktur mekanik Anda. Mungkin mudah, tergantung pada aplikasi Anda, atau penuh dengan detail dan batasan. Anda mungkin perlu mendesainnya dalam perangkat lunak CAD 3D atau hanya menggambarnya dalam 2D, tergantung pada kerumitan model Anda.
Anda juga dapat membeli struktur lengkap secara online jika Anda tidak ingin membangun struktur mekanis Anda sendiri. Ada banyak kit robot yang tersedia secara online. Dalam hal ini, Anda dapat melompat ke Langkah 6.
Untuk tutorial ini, bingkai akrilik murah dirancang untuk pemasangan motor dan komponen lainnya. Struktur yang disajikan dalam tutorial ini dirancang 3D menggunakan perangkat lunak CAD 123D Design. Setiap bagian kemudian dikonversi dalam 2D menggunakan perangkat lunak Draftsight.
Bahan-bahan berikut digunakan:
- Roda 42x19mm dengan ban tapak karet (x2)
- roda omni bola baja 49x20x32mm (x1)
- Klip tongkat selfie genggam
- Braket aluminium 3 x 3 cm (x4)
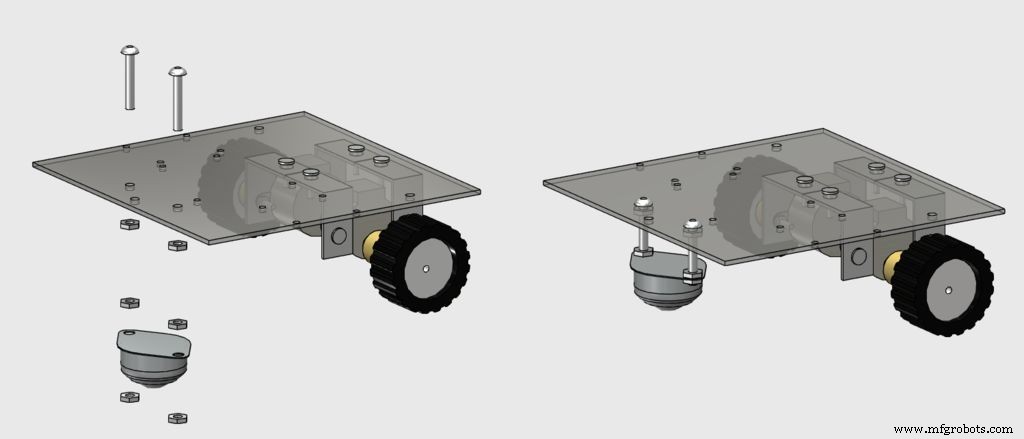
Konstruksi struktur dasar dibagi dalam langkah-langkah berikut:
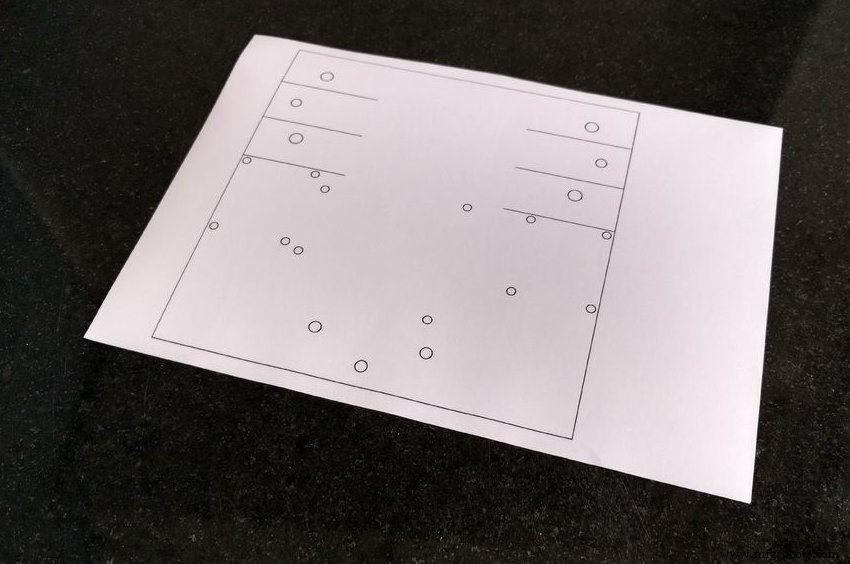
- Potong alas akrilik sesuai dengan dimensi pada gambar 2D;
- Bor lubang di posisi yang ditunjukkan pada gambar 2D;
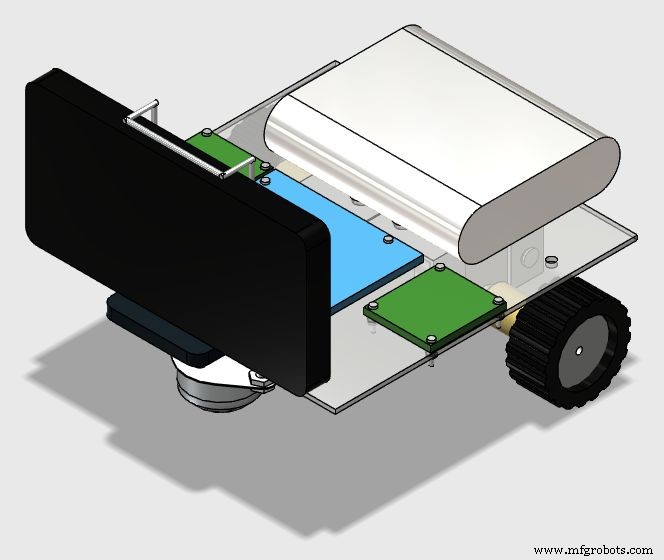
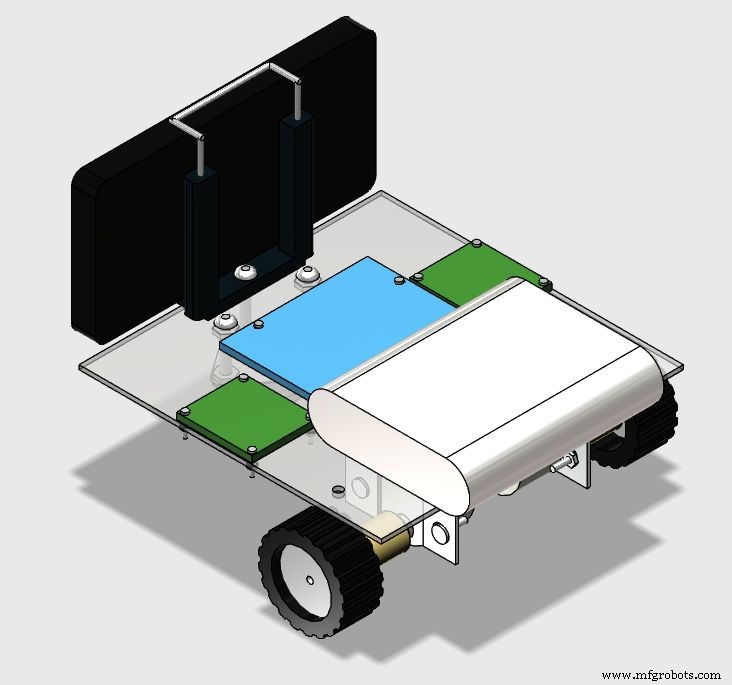
- Pasang komponen dengan baut dan mur sesuai dengan gambar 3D.
Sayangnya diameter poros motor stepper lebih besar dari lubang pada roda. Jadi, Anda mungkin perlu menggunakan lem untuk memasangkan komponen-komponen tersebut. Untuk tutorial ini saya mengimprovisasi sambungan kayu antara poros motor dan roda.
FMAR9JBITKJE83H.123dx F21RD24ITKJE8AJ.dwg FPTGSODITKJE8AN.pdf
Langkah 3:Memotong struktur 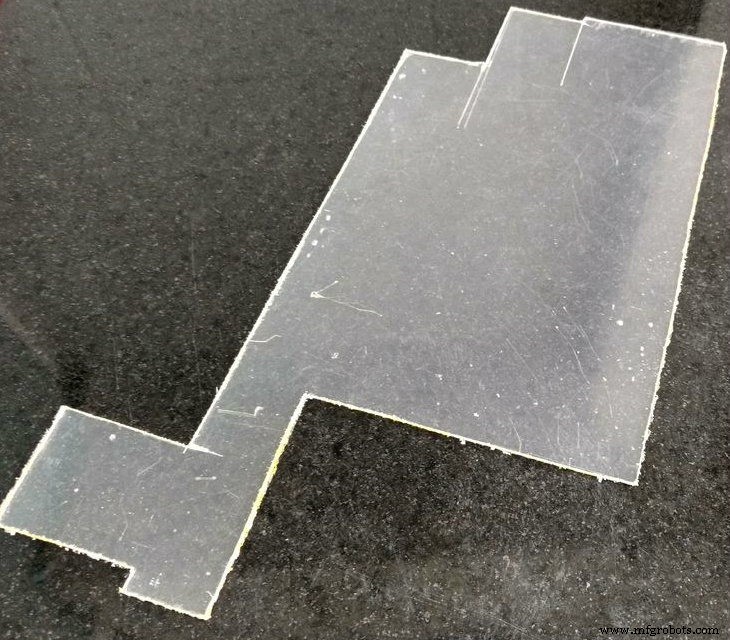
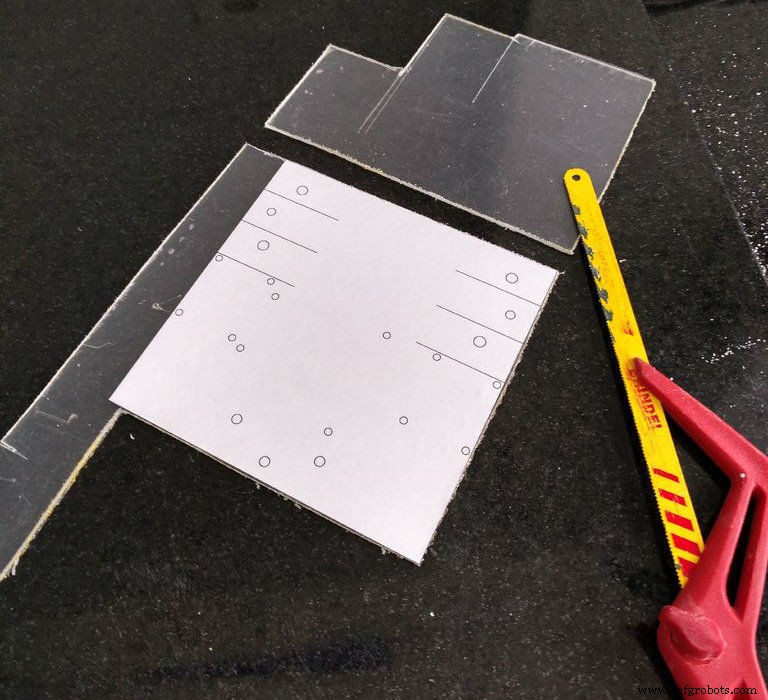
Pertama, Anda harus mentransfer dimensi model Anda ke lembaran akrilik. Cetak gambar 2D Anda menggunakan printer biasa di atas kertas berperekat, lalu potong kertas dengan ukuran yang sesuai dan aplikasikan masker itu pada permukaan akrilik.
Anda dapat menggunakan gergaji tangan untuk memotong akrilik sesuai dengan dimensi Anda atau menggunakan teknik break yang dijelaskan di bawah ini.
Dengan pisau utilitas dan dengan bantuan penggaris atau timbangan, potong akrilik dalam garis lurus. Anda tidak perlu memotong seluruh lembaran, cukup beri skor untuk membuat beberapa trek yang nantinya akan dipotong.
Tempatkan akrilik pada permukaan yang rata, tahan di tempatnya dengan beberapa klem dan berikan tekanan sampai lembaran itu pecah menjadi dua. Ulangi proses ini sampai semua pemotongan selesai. Setelah itu, Anda dapat menggunakan amplas untuk menghaluskan bagian tepi yang kasar.
Langkah 4:Mengebor dasar 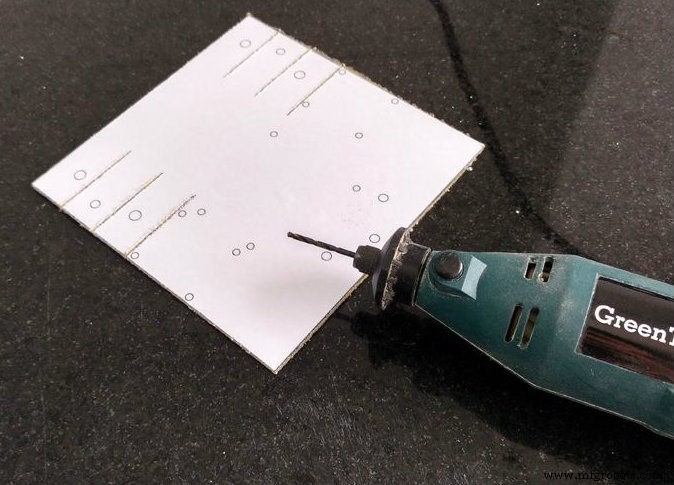
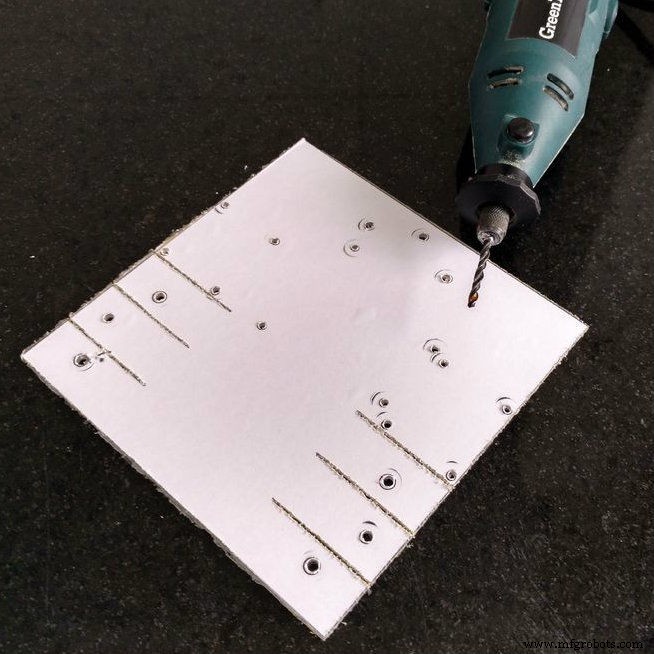
Bor lubang di posisi yang ditunjukkan pada gambar 2D (ditunjukkan dalam topeng) dengan mesin bor.
Akrilik relatif mudah dibor. Jadi jika Anda tidak membuang mesin bor, Anda dapat mengebor lubang secara manual dengan alat tajam, seperti pisau utilitas. Anda juga dapat menggunakannya untuk memperbesar lubang kecil agar sesuai dengan ukuran baut.
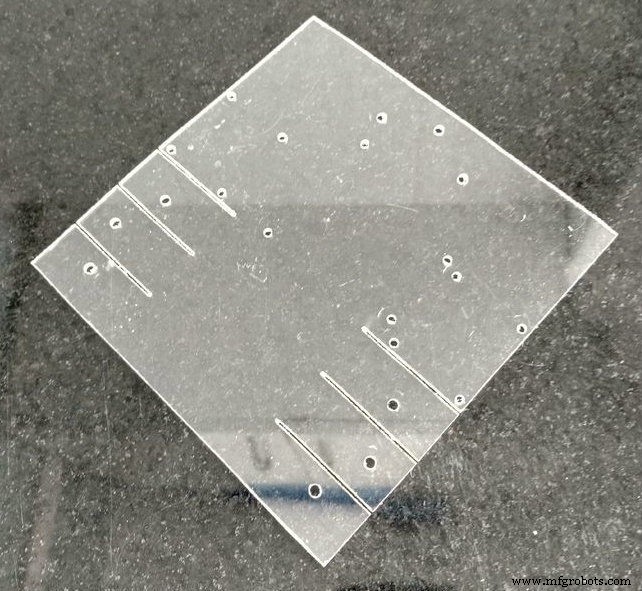
Lepaskan topeng dan alas Anda akan siap.
Langkah 5:Merakit struktur 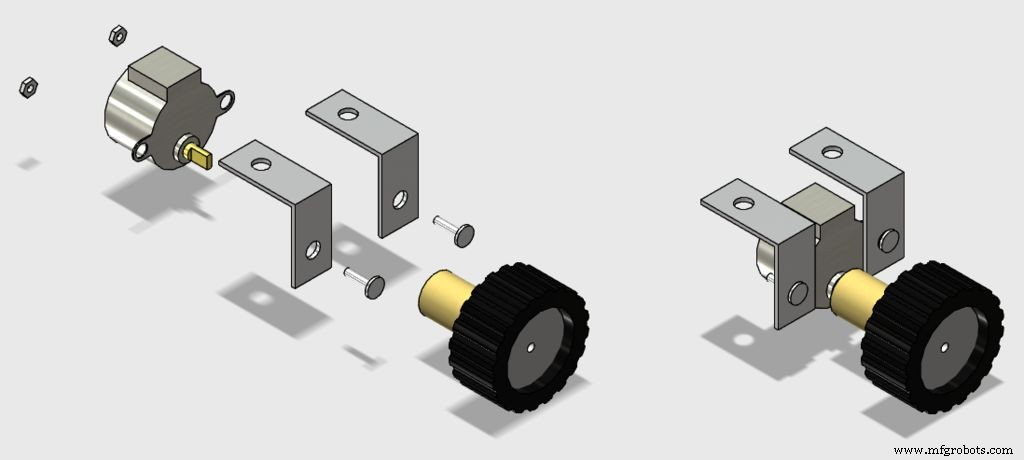
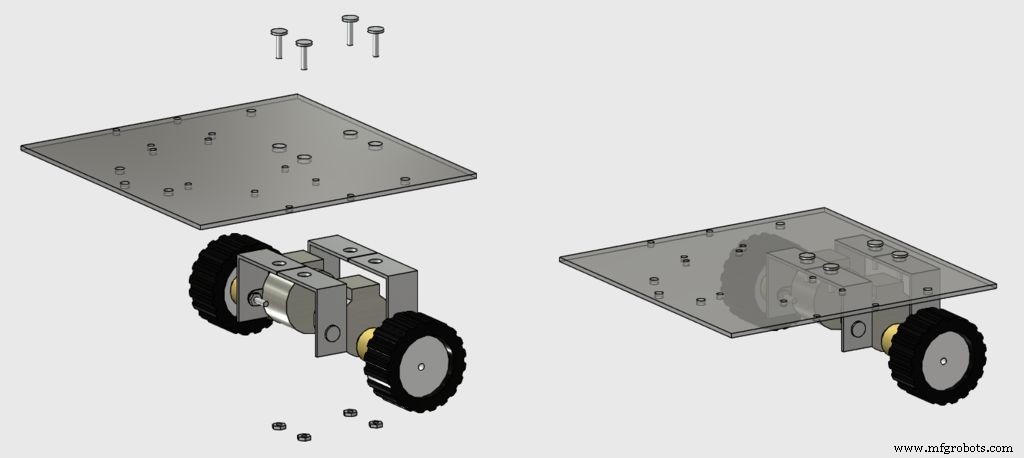
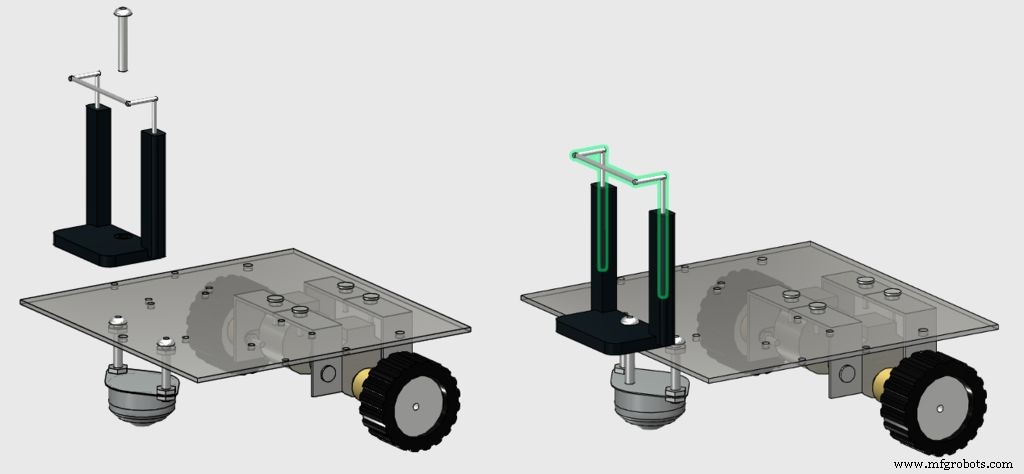
Pasang komponen dengan baut dan mur sesuai dengan gambar, dan struktur Anda akan siap digunakan.
Baut M3 digunakan untuk pemasangan motor stepper, sedangkan baut 5/32" digunakan untuk pemasangan roda depan dan klip smartphone.
Sekarang istirahat dan mulai merakit sirkuit pada langkah berikut...
Langkah 6:Elektronik 


Anda memerlukan komponen elektronik berikut:
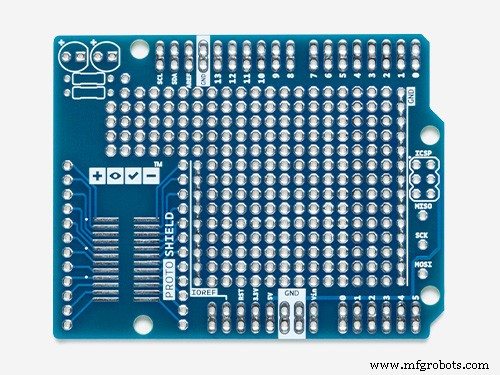
- Protoshield (untuk versi yang lebih ringkas) atau papan tempat memotong roti biasa (beli)
- Motor stepper dengan driver ULN2003 (x2) (beli / beli)
- Komputer (untuk mengkompilasi dan mengunggah kode Arduino)
Anda tidak memerlukan alat khusus untuk perakitan sirkuit. Semua komponen dapat ditemukan secara online di toko e-commerce favorit Anda. Sirkuit ini didukung oleh bank daya yang terhubung ke port USB Arduino.
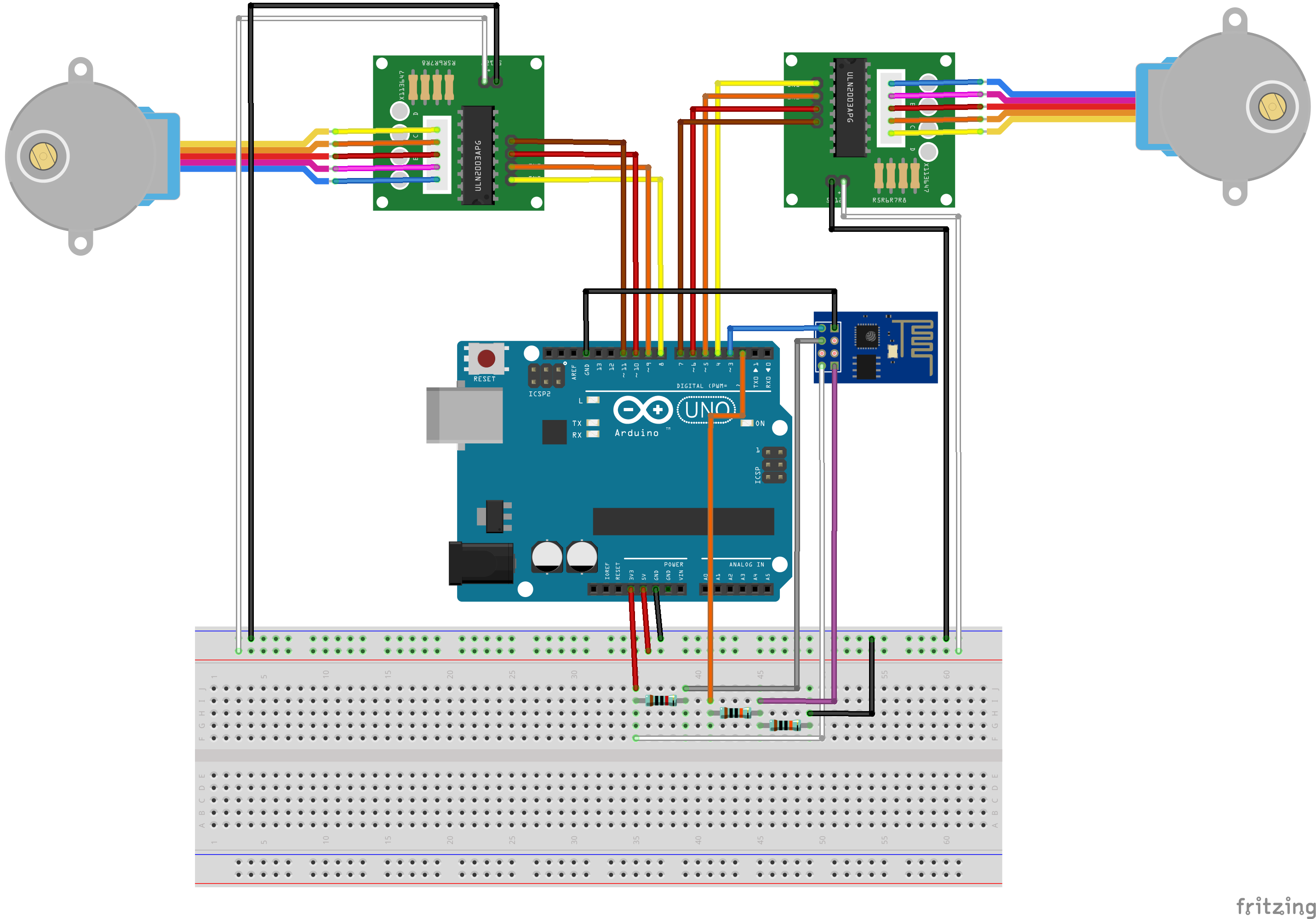
Hubungkan semua komponen sesuai dengan skema. Anda memerlukan beberapa kabel jumper untuk menghubungkan modul ESP-8266 dan motor stepper. Anda dapat menggunakan protoshield (untuk sirkuit yang lebih ringkas), papan tempat memotong roti biasa, atau mendesain pelindung Arduino milik Anda sendiri. Colokkan kabel USB ke papan Arduino Uno dan lanjutkan ke langkah berikutnya.
Langkah 7:Kode Arduino
Instal Arduino IDE terbaru. Dalam proyek ini perpustakaan stepper.h digunakan untuk mengontrol motor stepper. Tidak ada perpustakaan tambahan yang diperlukan untuk komunikasi dengan modul ESP-8266. Silakan periksa baudrate ESP8266 Anda dan atur dengan benar di kode.
Unduh kode Arduino (stepperRobot.ino) dan ganti XXXXX dengan SSID router wifi Anda dan YYYYY dengan kata sandi router. Hubungkan papan Arduino ke port USB komputer Anda dan unggah kodenya.
FG1K5KJITKJFW2R.ino
Langkah 8:Kamera IP Android 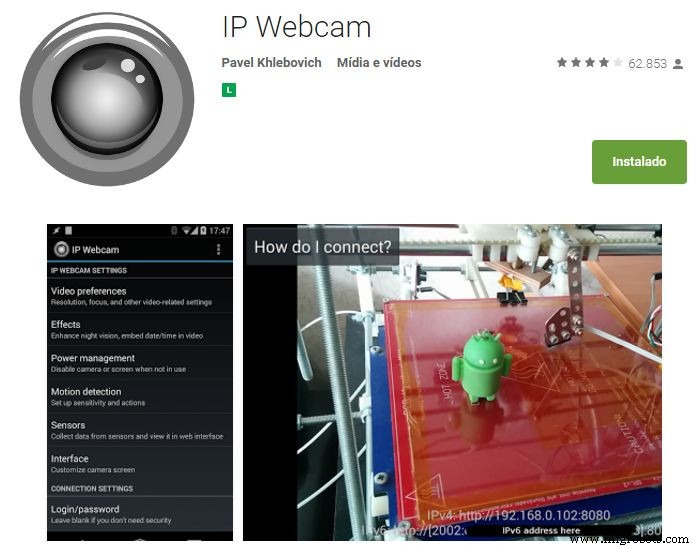
Smartphone Android digunakan untuk menyiarkan video dan audio dari robot ke antarmuka kontrol. Anda dapat menemukan aplikasinya di Google Play store (https://play.google.com/store/apps/details?id=com.pas.webcam).
Instal dan lanjutkan ke langkah berikutnya.
Langkah 9:Letakkan sirkuit di robot 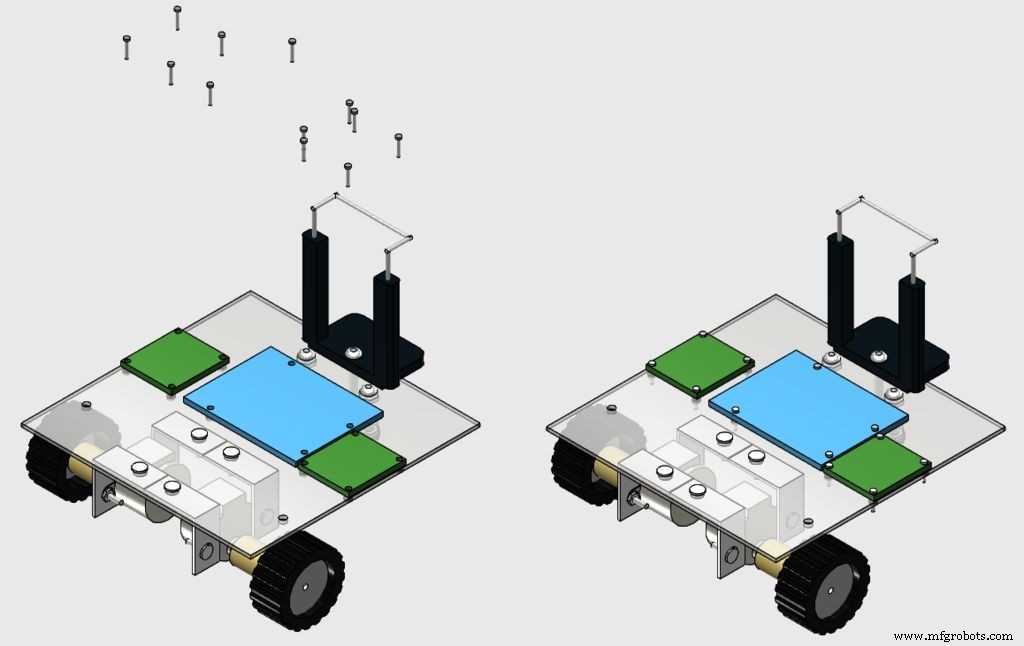
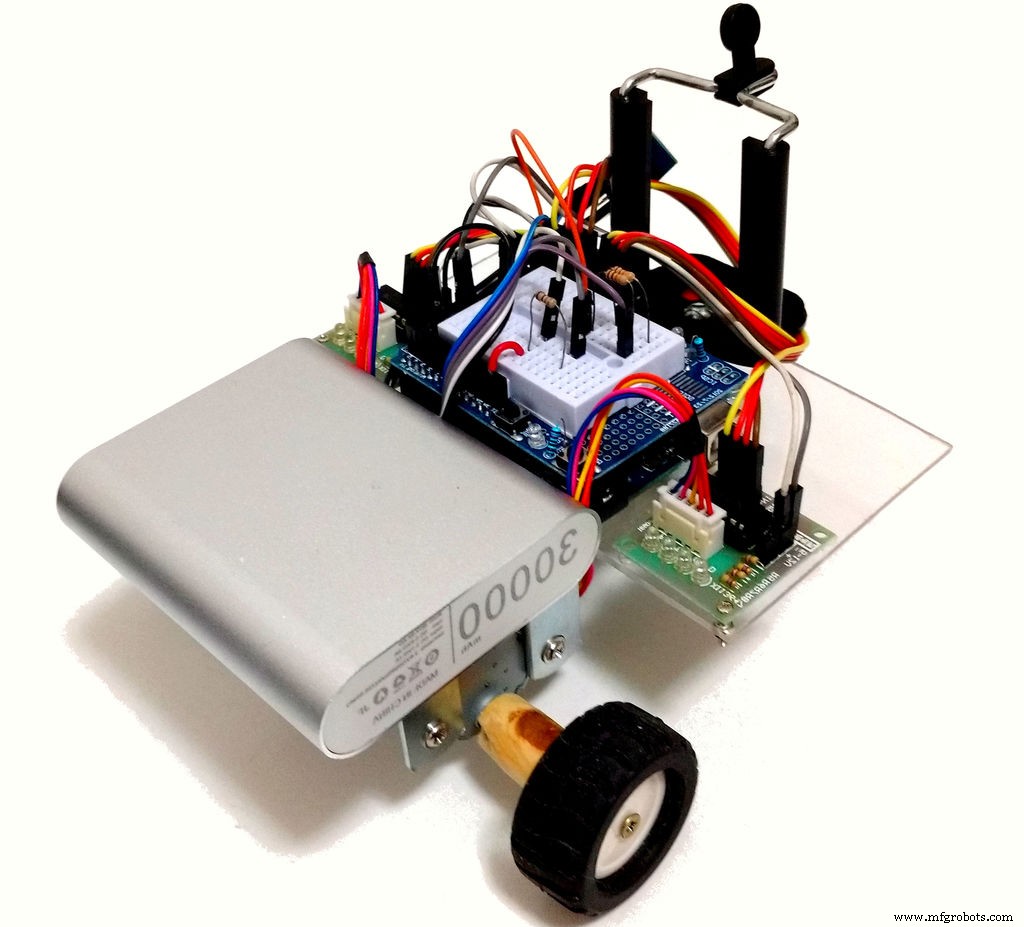
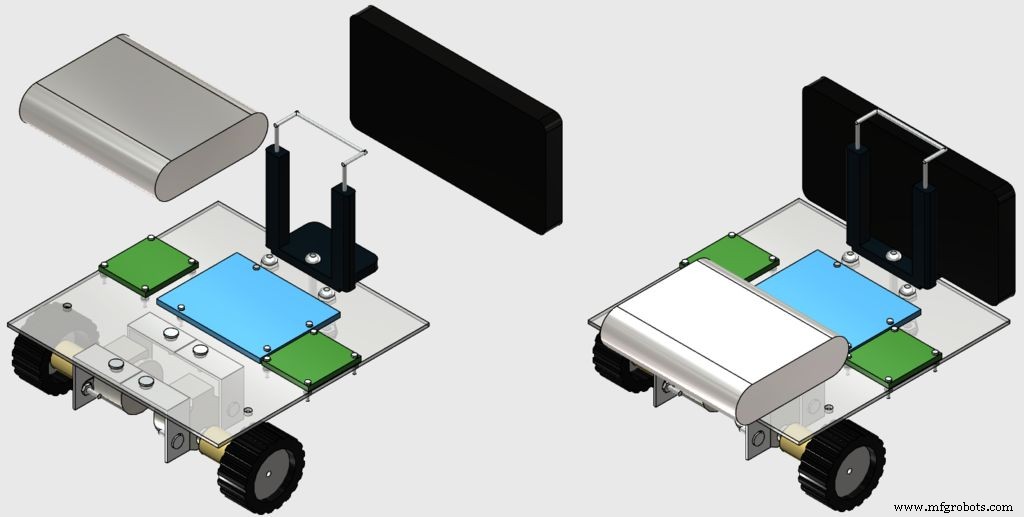
Pasang sirkuit di bagian atas robot menggunakan beberapa baut M1, seperti yang ditunjukkan pada gambar.
Setelah itu, rekatkan power bank Anda di bagian belakang robot menggunakan double tape (karena nanti mudah dilepas), dan masukkan smartphone Anda ke dalam klip.
Langkah 10:Antarmuka kontrol berbasis web 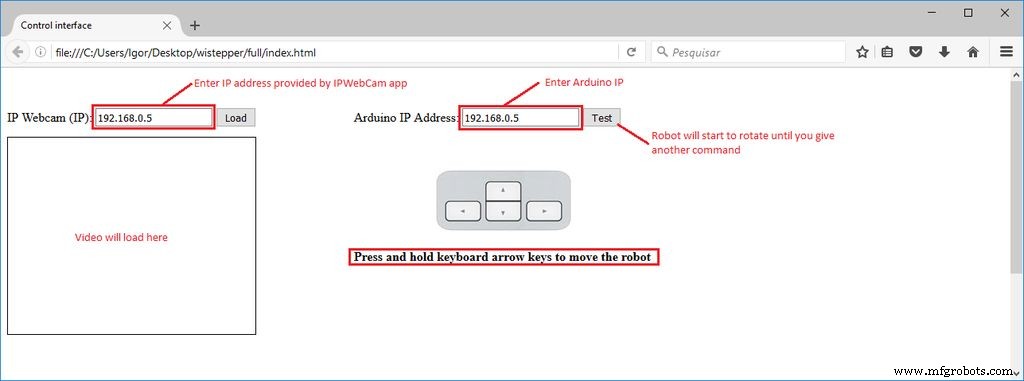
Antarmuka html dirancang untuk mengontrol robot.
Unduh interface.rar dan ekstrak semua file ke folder tertentu. Kemudian buka di Firefox.
Formulir kotak teks digunakan di antarmuka tersebut untuk memasukkan alamat IP modul ESP dan server video/audio (dari aplikasi Android IP Webcam).
Ada tes tapi, yang akan membuat robot berputar sampai perintah lain diterima. Tombol panah keyboard digunakan untuk menggerakkan robot ke depan atau ke belakang, dan untuk memutar ke kiri atau ke kanan.
FQTAWF5ITKJFW4O.rar
Langkah 11:Penggunaan
Ketika Arduino dihidupkan ulang, ia akan mencoba menghubungkan jaringan wi-fi Anda secara otomatis. Gunakan Serial Monitor untuk memeriksa apakah koneksi berhasil, dan untuk mendapatkan IP mana yang ditetapkan ke ESP-8266 oleh router Anda. Buka file html di browser internet (Firefox) dan informasikan alamat IP ini di kotak teks.
Anda juga dapat menggunakan cara lain untuk mengetahui alamat IP yang ditetapkan oleh router ke perangkat Anda.
Lepaskan Arduino Uno dari komputer Anda dan hubungkan ke bank daya. Tunggu hingga terhubung kembali.
Luncurkan aplikasi IP Webcam di smartphone yang terpasang pada robot. Ketik video/audio IP pada antarmuka kontrol Anda dan sambungkan ke server dan Anda akan siap untuk pergi. Anda mungkin perlu mengurangi resolusi video di aplikasi untuk mengurangi jeda antara waktu transmisi.
Klik dan tahan tombol panah pada keyboard Anda untuk memutar robot atau memindahkannya maju/mundur dan bersenang-senang menjelajahi lingkungan Anda.
Kode
- Arduino
- antarmuka kontrol html
ArduinoArduino
Kode Arduino.//include library#include #include SoftwareSerial esp8266(3, 2); //RX pin =3, TX pin =2//definisi variabel#define DEBUG true //tampilkan pesan antara ESP8266 dan Arduino dalam port serial int stepsPerRevolution =500;int state =5;Stepper rightStepper(stepsPerRevolution, 8,10, 9,11);Langkah kiriLangkah(langkahPerRevolusi, 4,6,5,7);//******//SETUP//******pengaturan batal(){ //mulai komunikasi Serial.begin(9600 ); esp8266.begin(19200); sendData("AT+RST\r\n", 2000, DEBUG); //reset modul sendData("AT+CWMODE=1\r\n", 1000, DEBUG); //set mode stasiun sendData("AT+CWJAP=\"XXXXX\",\"YYYYY\"\r\n", 2000, DEBUG); //koneksi jaringan wi-fi while(!esp8266.find("OK")) { //tunggu koneksi } sendData("AT+CIFSR\r\n", 1000, DEBUG); //tampilkan alamat IP sendData("AT+CIPMUX=1\r\n", 1000, DEBUG); //izinkan banyak koneksi sendData("AT+CIPSERVER=1,80\r\n", 1000, DEBUG); // memulai server web pada port 80 //Menentukan kecepatan motor rightStepper.setSpeed(60); leftStepper.setSpeed(60); }void loop(){ if (esp8266.available()) //verifikasi data yang masuk { if (esp8266.find("+IPD,")) //jika ada pesan { String msg; esp8266.find("?"); //cari pesan msg =esp8266.readStringUntil(' '); //membaca seluruh pesan Perintah string =msg.substring(0, 3); //3 karakter pertama =perintah String valueStr =msg.substring(4); //3 karakter berikutnya =nilai int nilai =nilaiStr.toInt(); if (DEBUG) { Serial.println(perintah); Serial.println(nilai); } //maju if(command =="cm1") { state =1; } //mundur if(command =="cm2") { state =2; } //belok kanan if(command =="cm3") { state =3; } //belok kiri if(command =="cm4") { state =4; } //jangan lakukan apa-apa if(command =="cm5") { state =5; } } } //maju jika (status ==1) { rightStepper.step(1); langkah kiri.langkah(-1); } //bergerak mundur if (status ==2) { rightStepper.step(-1); langkah kiri.langkah (1); } //pindah ke kanan if (status ==3) { rightStepper.step(1); langkah kiri.langkah (1); } //pindah ke kiri if (status ==4) { rightStepper.step(-1); langkah kiri.langkah(-1); } //tidak melakukan apa-apa jika (status ==5) { } }//*******************//Fungsi bantu//********* ***********String sendData(String command, const int timeout, boolean debug){ String response =""; esp8266.print(perintah); waktu int panjang =milis(); while ( (waktu + batas waktu)> milis()) { while (esp8266.available()) { char c =esp8266.read(); tanggapan +=c; } } if (debug) { Serial.print(respon); } kembalikan tanggapan;}
antarmuka kontrol htmlHTML
Tidak ada pratinjau (hanya unduhan).
Suku cadang dan penutup khusus
File desain 123D. robot.123dx2D desain dasar. base.dwg Skema
Skema sirkuitKoneksi papan tempat memotong roti dari sirkuitFritzing file sirkuit wistepper%20-%20rev1.fzz