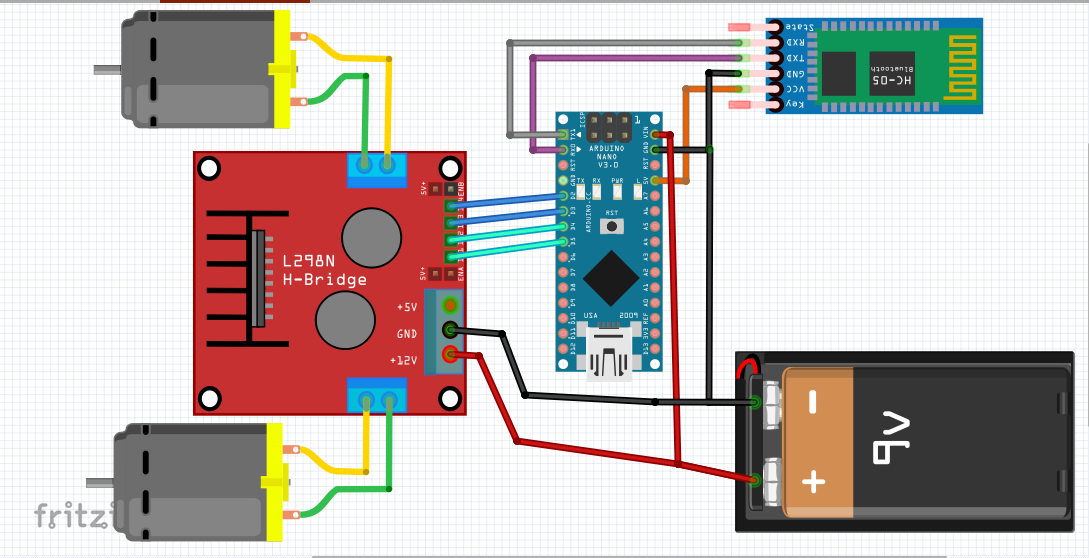
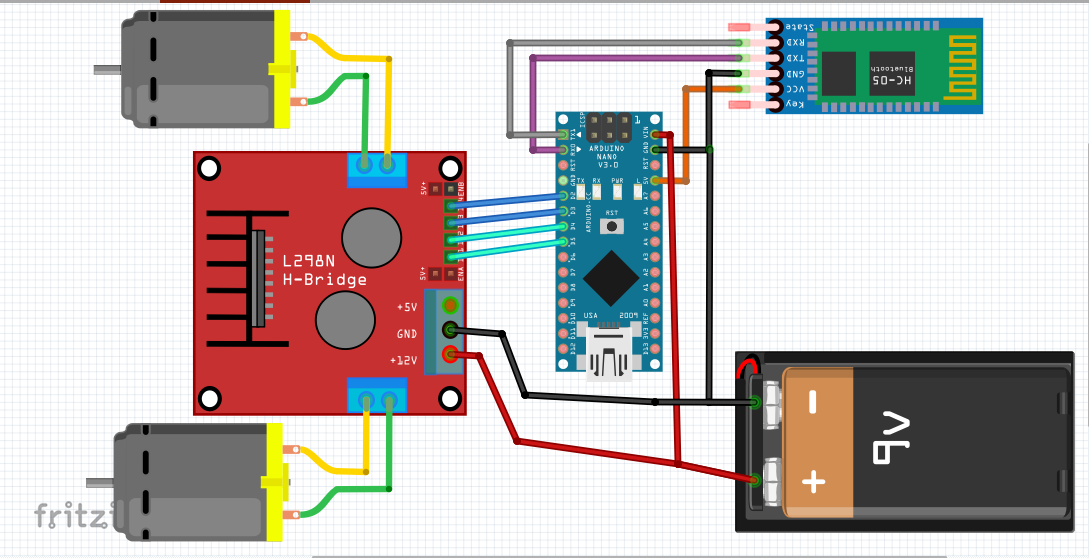
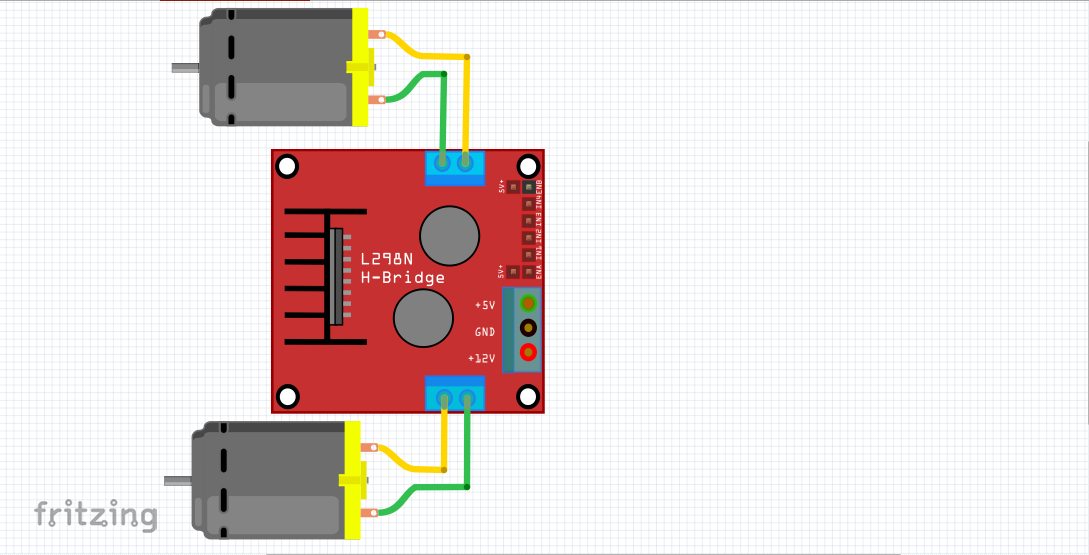
Koneksi lurus ke depan. Hubungkan semua hal seperti yang ditunjukkan pada diagram sirkuit. Saya akan mulai dari menghubungkan motor ke driver motor -
Pengemudi motor ke motor,
- Kabel motor1 menuju salah satu ujung driver,
- Motor2 pergi ke ujung lain.
Untuk mengontrol motor,
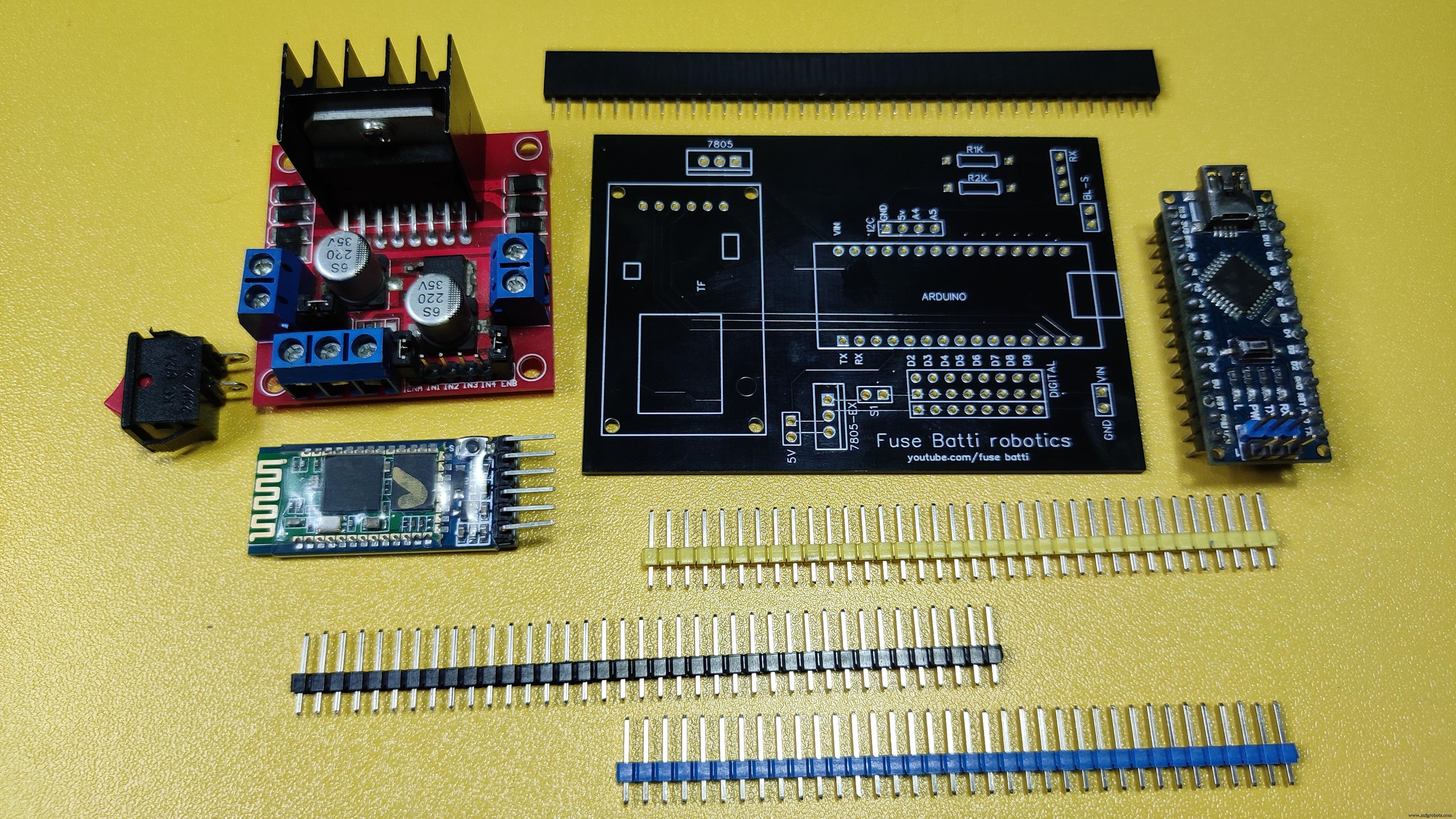
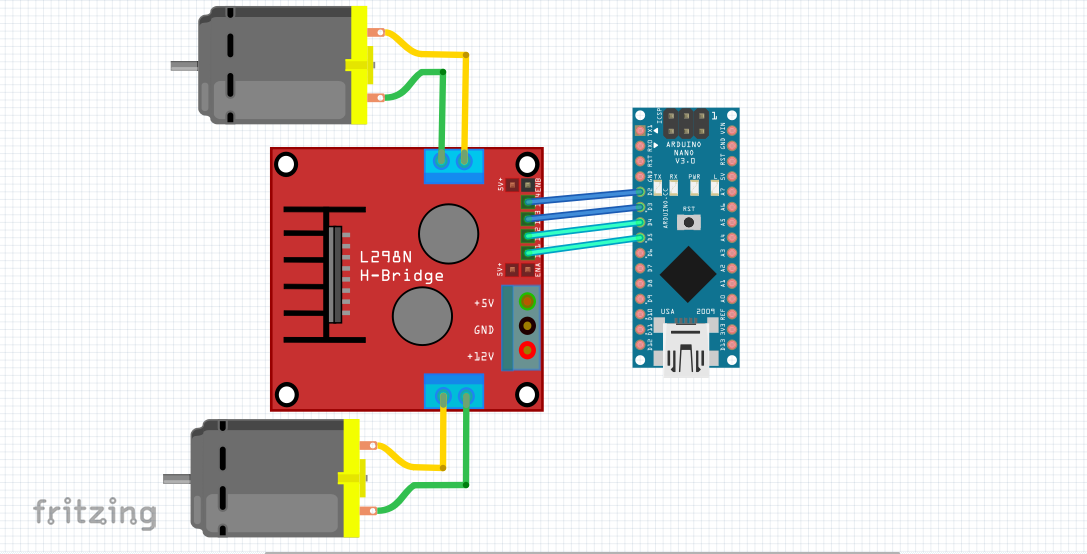
- Pin motor1 pada driver motor L298n terhubung ke pin Arduino 2 dan 3 (digital).
- Motor2 terhubung pada 4 dan 5
Modul Bluetooth,
- Terima kasih untuk Arduino Rx
Baterai,
Saya menggunakan baterai 7.4V untuk motor, yang terhubung ke input driver motor dan Arduino VIN dan Ground Pin. Diperlukan koneksi arde bersama.
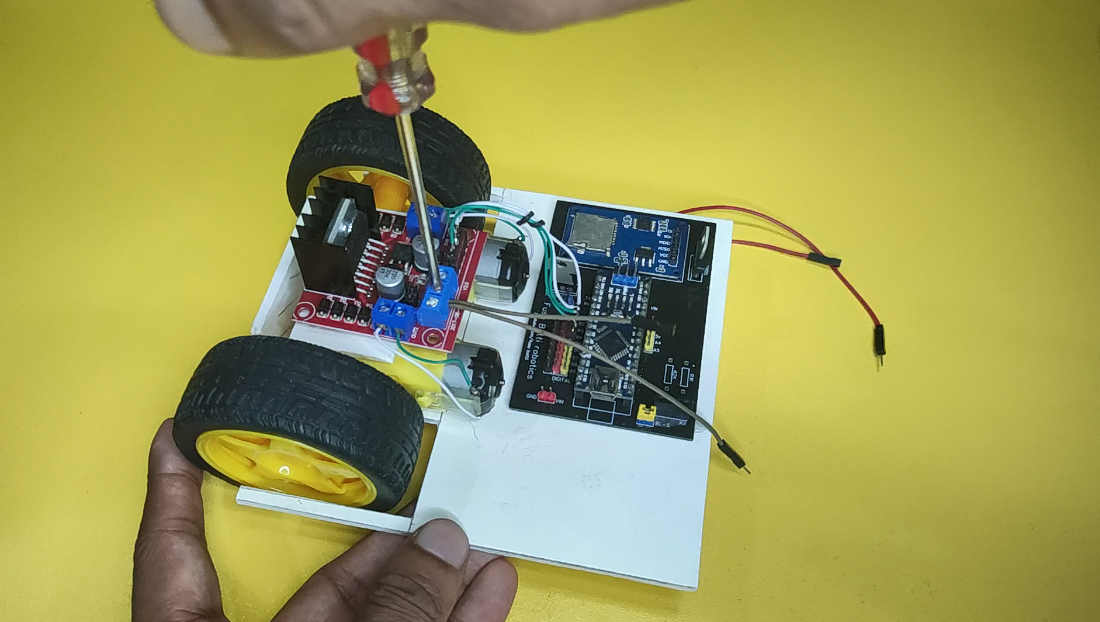
Kemudian saya menghubungkan baterai di semua hal yang menyala. Artinya, saya tidak melakukan kesalahan.
Langkah 6:Memprogram Arduino
Ini adalah program yang sederhana. Program memeriksa karakter dan jika diterima maka akan ke kiri kanan dll. Daftarnya adalah -
Modul Bluetooth terhubung pada port serial, sehingga Arduino berkomunikasi melalui serial dalam 9600 bps.
Saya mengatur bagian Saya menentukan pin dan kecepatan buad -
void setup(){//initlize mode pinspinMode(lm1,OUTPUT);pinMode(lm2,OUTPUT);pinMode(rm1,OUTPUT);pinMode(rm2,OUTPUT);//set tingkat komunikasi serialSerial.begin(9600);}
Di mainloop Ini memeriksa data yang diterima melalui serial-
//periksa apakah arduino menerima sinyal atau tidak(Serial.available() ==0);val =Serial.read(); //membaca signalSerial.print(val);
Dan kemudian kode utama, unduh dari sini. Saya menempelkan seluruh kode di bawah ini -
/**** Arduino Speech/voice Controlled robot **** by Ashraf Minhaj* email saya di ashraf_minhaj@yahoo.com* tutorial- ashrafminhajfb.blogspot.com*///Declare the arduino pinsint lm1 =4; //deklarasikan pin motor pertama lm2 =5;int rm1 =2; //pinsint motor kanan rm2 =3;char val;void setup(){//initlize mode pinspinMode(lm1,OUTPUT);pinMode(lm2,OUTPUT);pinMode(rm1,OUTPUT);pinMode(rm2,OUTPUT );//set tingkat komunikasi serialSerial.begin(9600);}void loop(){//periksa apakah arduino menerima sinyal atau tidak saat(Serial.available() ==0);val =Serial.read(); //membaca sinyal//Serial.print(val);/*********Untuk gerakan Maju*********/if (val =='F'){//Serial .println("FORWARD");digitalWrite(lm1,HIGH);digitalWrite(rm1,HIGH);digitalWrite(lm2,LOW);digitalWrite(rm2,LOW);}/*********Untuk Gerakan Mundur *********/else if(val =='B'){digitalWrite(lm2,HIGH);digitalWrite(rm2,HIGH);digitalWrite(lm1,LOW);digitalWrite(rm1,LOW);} /*********Kanan*********/else if(val =='R'){digitalWrite(lm1,HIGH);digitalWrite(rm2,HIGH);digitalWrite(lm2, LOW);digitalWrite(rm1,LOW);}/*********Kiri*********/else if(val =='L'){digitalWrite(lm2,HIGH); digitalWrite(rm1,HIGH);digitalWrite(lm1,LOW);digitalWrite(rm2,LOW);}/*********STOP*********/else{digitalWrite(lm1,LOW );digitalWrite(rm1,LOW);digitalWrite(lm2,LOW);digitalWrite(rm2,LOW);}delay(10);}
Unggah kodenya lalu buat aplikasinya.
Langkah 7:Aplikasi untuk SPEECH to TEXT 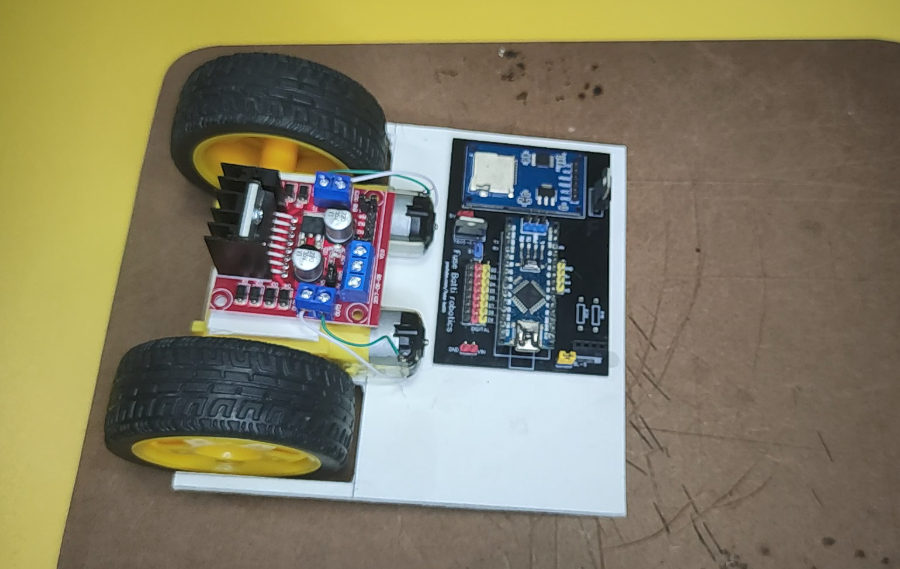
Saya membuat aplikasi menggunakan penemu aplikasi MIT. Anda dapat mengedit dan menyesuaikan aplikasi ini sesuai kebutuhan Anda. Dapatkan aia fie dari sini.
Aplikasi ini menggunakan konektivitas Bluetooth untuk mengontrol robot. Untuk itu saya perlu memasangkan modul Bluetooth HC05 ke ponsel saya. Kata sandi default adalah 1234 atau 0000.
Aplikasi ini menggunakan Google Speech to Text API untuk mengubah apa yang saya katakan menjadi bentuk teks. Kemudian membuat kalimat menjadi huruf kecil, lebih mudah untuk memproses seperti itu. Dan cocok menggunakan pernyataan if else. Jika pengguna mengatakan 'maju' kirim Arduono huruf 'F' dan itu akan maju. Itu dia.
Buat dan simpan sebagai file APK, atau gunakan milik saya, instal di ponsel Anda.
wicara-dikendalikan-robot-schematic.fzz
Langkah 8:Nyalakan Bot, Jalankan Aplikasi, dan Jalankan!
Sekarang cukup colokkan baterai, dan gunakan aplikasi Android untuk bermain-main dengan robot baru Anda!
Terima kasih telah membaca. Lihat proyek terbaru saya -
Kode
- Cuplikan kode #1
- Cuplikan kode #3
Cuplikan kode #1Teks biasa
void setup(){ //initlize mode pins pinMode(lm1,OUTPUT); pinMode(lm2,OUTPUT); pinMode(rm1, OUTPUT); pinMode(rm2,OUTPUT); //set kecepatan komunikasi serial Serial.begin(9600);} Cuplikan kode #3Teks biasa
/**** Arduino Speech/voice Controlled robot *** * oleh Ashraf Minhaj * email saya di ashraf_minhaj@yahoo.com * tutorial- ashrafminhajfb.blogspot.com *///Deklarasikan pinsint arduino lm1 =4; //deklarasikan pin motor pertama lm2 =5;int rm1 =2; //pinsint motor kanan rm2 =3;char val;void setup(){ //menginisialisasi mode pin pinMode(lm1,OUTPUT); pinMode(lm2,OUTPUT); pinMode(rm1, OUTPUT); pinMode(rm2,OUTPUT); //mengatur kecepatan komunikasi serial Serial.begin(9600);}void loop(){ //memeriksa apakah arduino menerima sinyal atau tidak while(Serial.available() ==0); val =Serial.read(); //membaca sinyal //Serial.print(val); /*********Untuk gerakan Maju*********/ if (val =='F') { //Serial.println("FORWARD"); digitalTulis(lm1, TINGGI); digitalWrite(rm1,TINGGI); digitalWrite(lm2,RENDAH); digitalWrite(rm2,RENDAH); } /*********Untuk Gerakan Mundur*********/else if(val =='B') { digitalWrite(lm2,HIGH); digitalWrite(rm2,TINGGI); digitalWrite(lm1,RENDAH); digitalWrite(rm1,RENDAH); } /*********Kanan*********/else if(val =='R') { digitalWrite(lm1,HIGH); digitalWrite(rm2,TINGGI); digitalWrite(lm2,RENDAH); digitalWrite(rm1,RENDAH); } /*********Kiri*********/else if(val =='L') { digitalWrite(lm2,HIGH); digitalWrite(rm1,TINGGI); digitalWrite(lm1,RENDAH); digitalWrite(rm2,RENDAH); } /*********STOP*********/else { digitalWrite(lm1,LOW); digitalWrite(rm1,RENDAH); digitalWrite(lm2,RENDAH); digitalWrite(rm2,RENDAH); } penundaan (10); } Github
https://github.com/ashraf-minhaj/speech-controlled-robothttps://github.com/ashraf-minhaj/speech-controlled-robot Skema
speech-controlled-robot-schematic_hUoWKpapKe.fzz