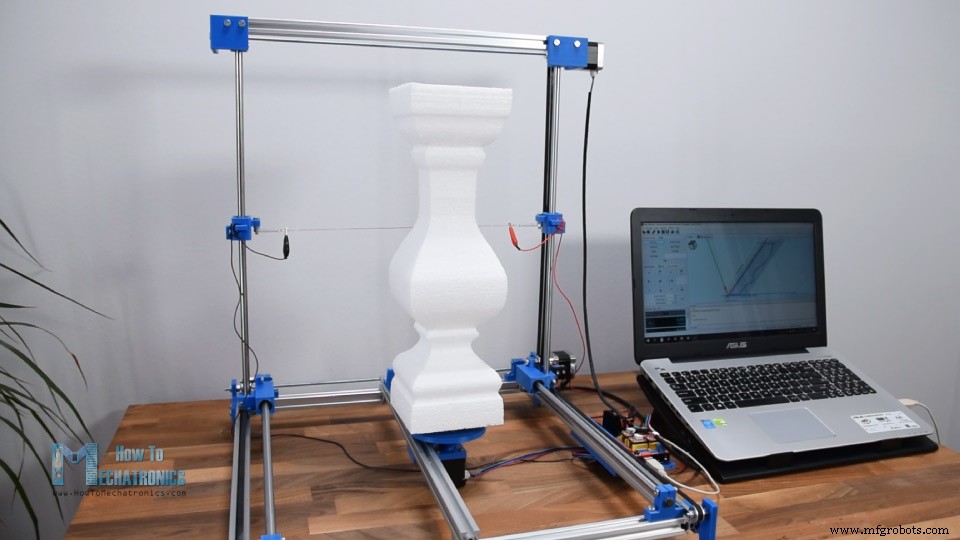
Dalam tutorial ini kita akan belajar cara membuat mesin pemotong busa Arduino CNC. Ini adalah mesin CNC DIY khas karena terbuat dari bahan yang sederhana dan murah, beberapa bagian yang dicetak 3D dan memiliki Arduino sebagai pengontrol.
Anda dapat menonton video berikut atau membaca tutorial tertulis di bawah ini.
Ringkasan
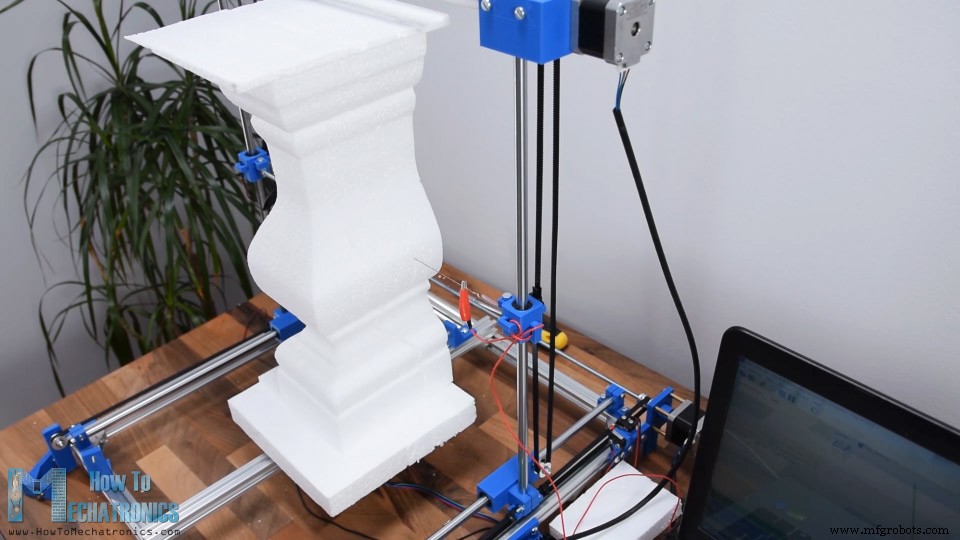
Alih-alih bit atau laser, alat utama mesin ini adalah kawat panas, atau jenis kawat resistansi khusus yang menjadi sangat panas ketika arus mengalir melaluinya. Kawat panas melelehkan atau menguapkan busa saat melewatinya sehingga kami dapat dengan tepat dan mudah mendapatkan bentuk apa pun yang kami inginkan.
Saya katakan dengan mudah karena membangun mesin CNC sebenarnya tidak terlalu sulit. Jika Anda seorang pemula dan berpikir untuk membuat mesin CNC DIY pertama Anda, tetap ikuti perkembangannya karena saya akan menjelaskan cara kerjanya. Saya akan menunjukkan kepada Anda seluruh proses pembuatannya, mulai dari merancang mesin, menghubungkan komponen elektronik, memprogram Arduino dan juga menjelaskan cara menyiapkan bentuk Anda, membuat kode-G, dan mengontrol mesin menggunakan program open source gratis. Jadi, mari selami.
Mesin Pemotong Busa CNC Arduino Model 3D
Untuk memulainya, inilah model 3D mesin ini. Anda dapat mengunduh dan model 3D di bawah ini.

Anda dapat menemukan dan mengunduh model 3D ini, serta menjelajahinya di browser Anda di Thangs.
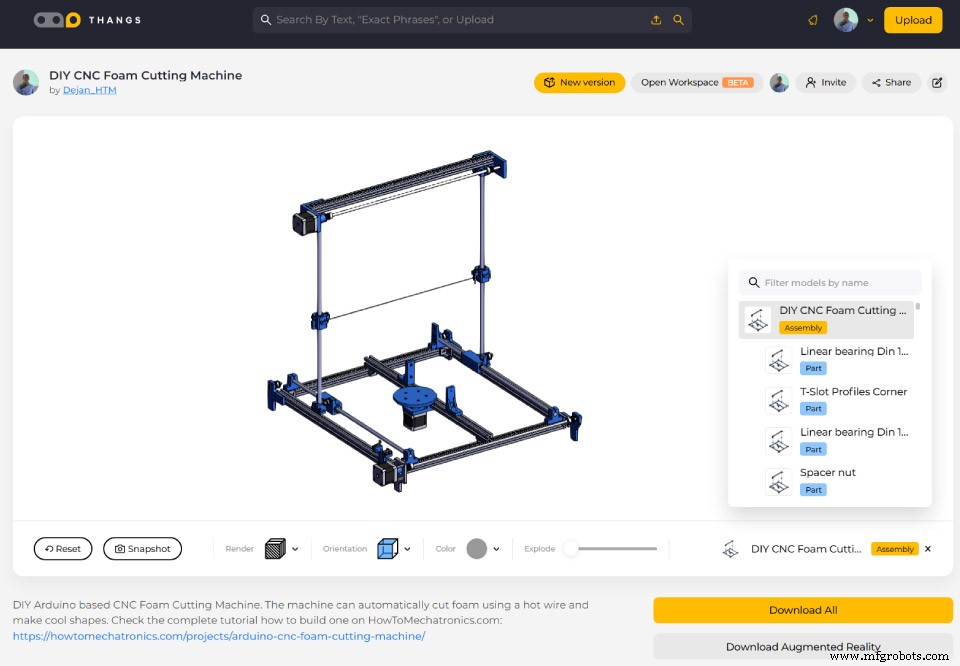
Unduh model perakitan 3D di Thans.
File STL untuk Pencetakan 3D:
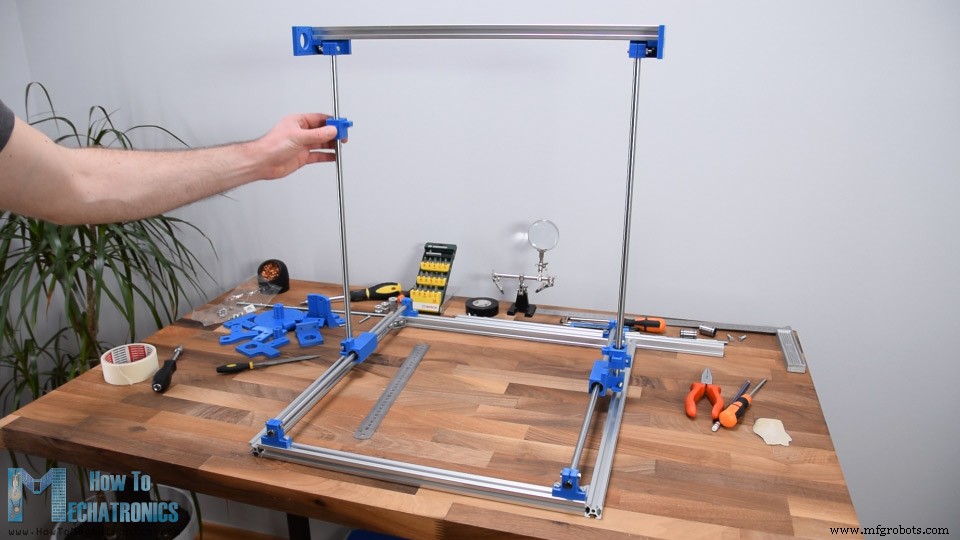
Konstruksi dasarnya terbuat dari profil aluminium slot-T 20x20mm. Saya memilih profil ini karena mudah digunakan, kami tidak perlu mengebor lubang atau apa pun saat merakit, dan selain itu dapat digunakan kembali, kami dapat dengan mudah membongkar dan menggunakannya untuk proyek lain. Gerakan setiap sumbu dicapai dengan menggunakan bantalan linier yang meluncur pada batang halus 10mm. Saya menggunakan dua batang untuk setiap sumbu.
Blok geser mungkin terlihat agak aneh tetapi dirancang sedemikian rupa sehingga dapat dengan mudah dicetak 3D sebagai satu bagian sekaligus memiliki banyak fungsi. Jadi, misalnya, balok geser X menampung dua bantalan linier, menahan batang sumbu Y, menahan katrol untuk sabuk sumbu Y, serta memiliki pegangan untuk memasang sabuk sumbu X.
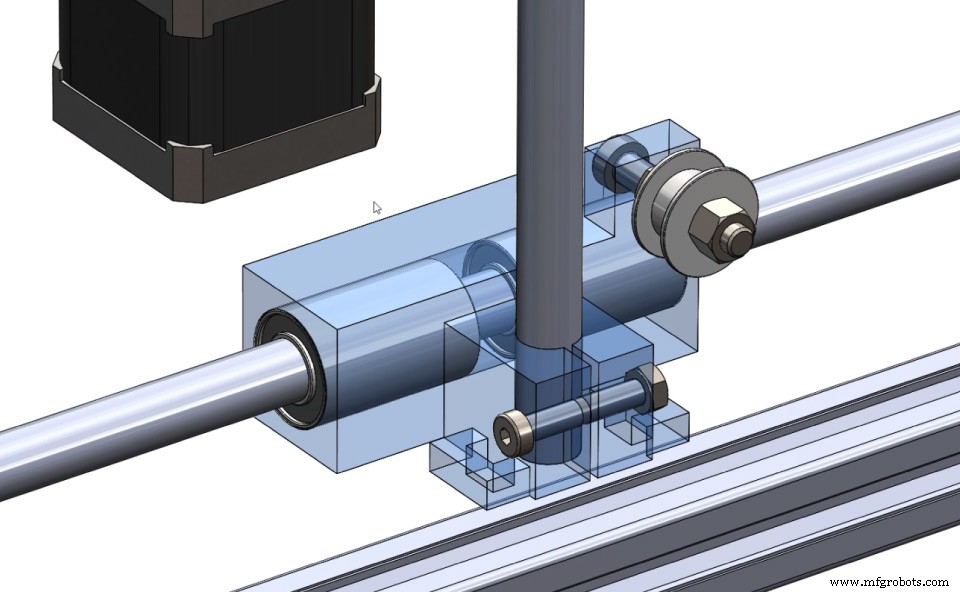
Untuk menggerakkan blok geser, kami menggunakan motor stepper NEMA 17. Dengan menggunakan coupler poros, batang berulir sederhana, dua puli, dan dua sabuk, kami dapat menggerakkan dua balok geser pada setiap rel secara merata pada saat yang bersamaan.
Di sini kami juga dapat melihat bahwa kami memiliki motor stepper ketiga yang memungkinkan mesin membuat bentuk 2.5D dan kami akan menjelaskan cara kerjanya nanti di video.
Secara keseluruhan, dalam hal konstruksi dan kekakuan, desainnya mungkin tidak begitu bagus, tapi maksud saya adalah membuat mesin yang berfungsi dengan suku cadang seminimal mungkin dan tetap dapat menyelesaikan pekerjaan.
Untuk bagian pencetakan 3D saya menggunakan printer 3D Creality CR-10 saya yang merupakan printer 3D yang sangat bagus dengan harga yang terjangkau.
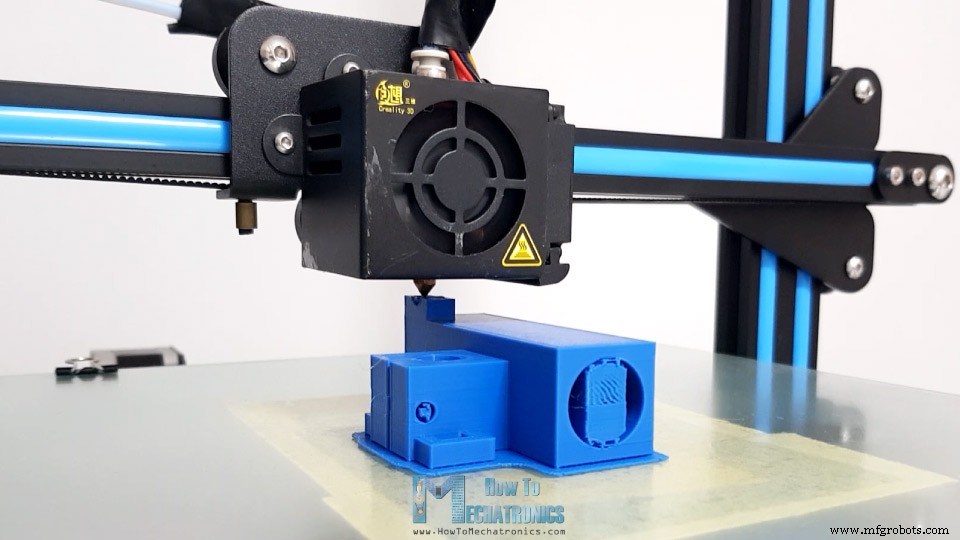
Perhatikan bahwa beberapa bagian cetakan 3D memerlukan sedikit pasca-pemrosesan, atau bahan pendukung harus dilepas sebelum digunakan.
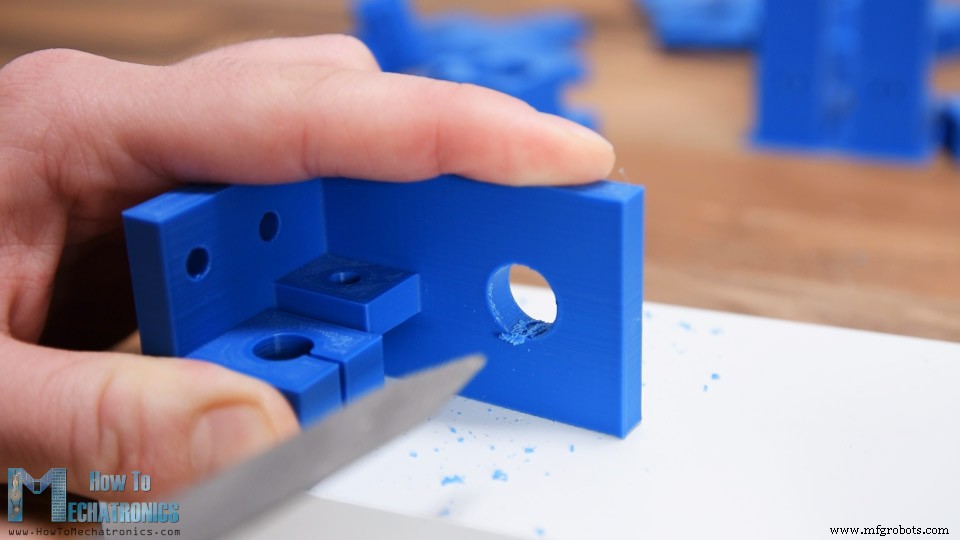
Dalam beberapa kasus, saya juga harus menggunakan serak untuk menghilangkan bahan berlebih, saya kira karena pengaturan dukungan yang buruk pada perangkat lunak pengiris.
Merakit CNC
Bagaimanapun, sekarang saya sudah menyiapkan semua bahan sehingga saya bisa mulai merakit mesin.
Berikut daftar semua komponen utama yang digunakan dalam mesin CNC ini. Daftar komponen elektronik dapat ditemukan di bawah di bagian diagram rangkaian artikel.
- Profil Aluminium Slot T 6x 20x20mm 500mm …. Amazon / Bagus / AliExpress
- Batang Rel Linear 4x 10mm ………………….. Amazon / Bagus / AliExpress
- 6x braket sudut profil slot-T ………….. Amazon / Bagus / AliExpress
- 50x mur M5 untuk Profil Slot-T………………. Amazon / Bagus / AliExpress
- Bantalan linier 6x 10mm ……………………… Amazon / Bagus / AliExpress
- Sabuk GT2 + Katrol Gigi + Katrol Pemalas …. Amazon / + Katrol Pemalas
- 2x Bantalan 5x16x5mm ……………………….. Amazon / Bagus / AliExpress ….. Catatan:Dalam video saya menggunakan bantalan 6mm serta batang berulir dan katrol GT2. Di sini saya menyarankan untuk menggunakan 5mm karena dimensi ini lebih umum dan dapat dengan mudah ditemukan. Oleh karena itu, dalam file unduhan STL, saya juga menyertakan dua versi skrup poros dan braket pemasangan untuk menyesuaikan dimensi ini. Jadi, pastikan Anda mempertimbangkan hal ini saat mencetak 3D bagian tersebut.
- Spacer Nuts ………………………………… / Banggood / AliExpress
- Set bermacam-macam musim semi……………….. Amazon / Bagus / AliExpress
- Kawat panas ………………………………………. Amazon / AliExpress
- Batang berulir 2x 50cm atau jenis batang apa pun berdiameter 6 atau 5mm tergantung diameter dalam puli
- Baut dan mur dari toko perangkat keras lokal: M3x30 x8, M4x25 x4, M4x30 x4, M5x10/12 x40, M5x15 x8, M5x25 x4, M5x30 x4

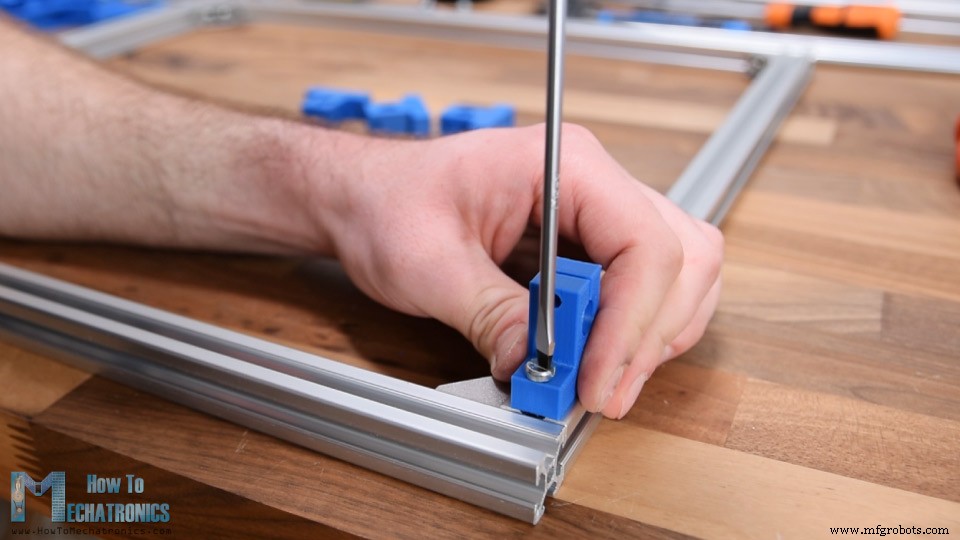
Profil aluminium slot-T yang saya miliki panjangnya 60cm, jadi menurut model 3D, saya memotong masing-masing sesuai ukuran menggunakan gergaji tangan logam. Kemudian menggunakan kurung sudut, saya merakit bingkai dasar. Selanjutnya, saya memasang tepukan poros untuk sumbu X. Anda tahu, bekerja dengan profil slot-T sangat mudah, kita hanya memerlukan beberapa baut M5 dan mur slot-T untuk memasang segala macam benda ke dalamnya.
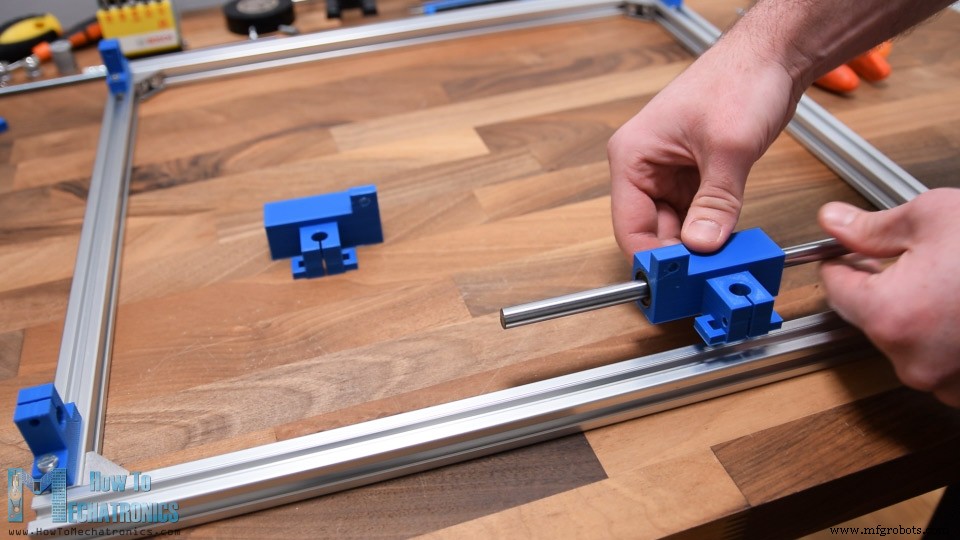
Selanjutnya, saya memasukkan batang poros melalui klem. Saat setengah dimasukkan, kita juga perlu menambahkan blok geser sumbu X. Kami hanya menempatkan dua bantalan di dalamnya dan kemudian memasukkannya ke poros. Sekarang kita dapat menggeser poros ke sisi lain dan menggunakan baut M4 dan mur, kita dapat mengencangkan poros di tempatnya. Saya mengulangi proses ini untuk sisi lain juga.
Selanjutnya, kita perlu menginstal sumbu Y. Untuk itu, pertama-tama kita perlu memasukkan batang ke dalam blok geser sumbu X, menempatkannya rata dengan bagian bawah bagian dan kencangkan menggunakan mur dan baut M4. Kemudian kita dapat memasukkan blok geser sumbu Y. Blok geser ini hanya menggunakan bantalan linier tunggal.

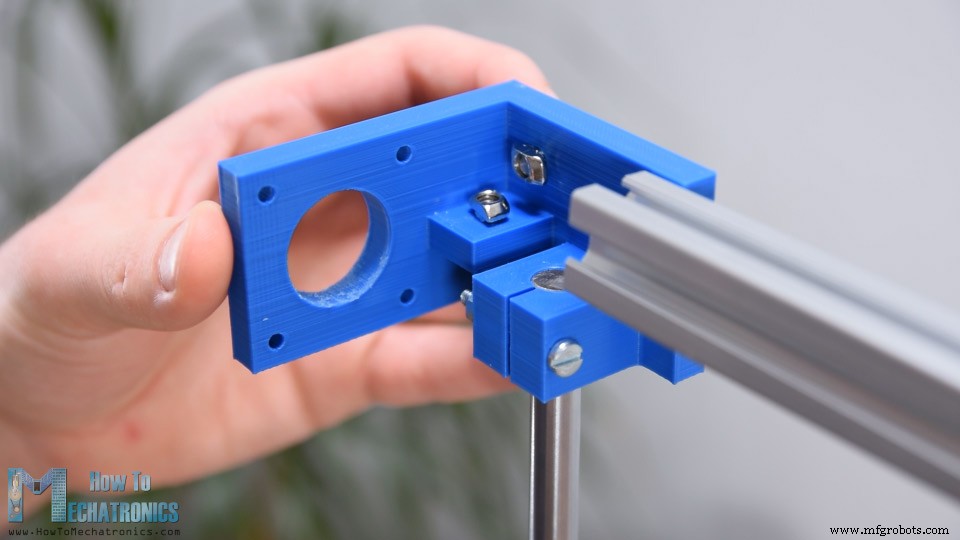
Di atas batang sumbu Y kita perlu memasang braket pemasangan yang akan menghubungkan kedua batang sumbu Y dengan profil slot-T di bagian atas. Sekali lagi, kami menggunakan metode yang sama untuk mengamankannya ke batang. Untuk memasang profil slot-T ke braket pemasangan, pertama-tama saya menambahkan 3 baut M5 dan mur slot-T. Kemudian saya hanya memasukkan profil, dan mengencangkan bautnya.
Jadi, dengan ini kita memiliki konstruksi utama yang dibangun dan kita dapat dengan bebas bergerak di sumbu X dan Y.
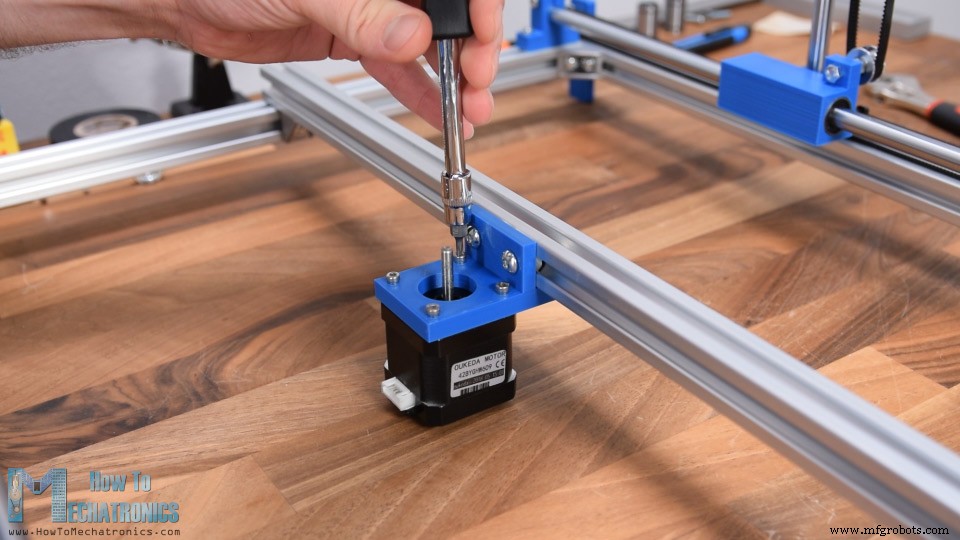
Selanjutnya, saya memasang kaki pada bingkai dasar. Sekali lagi, sangat mudah untuk melakukannya menggunakan profil slot-T. Setelah kaki diamankan, saya akan memasukkan motor stepper pertama untuk sumbu X. Dalam hal ini saya menggunakan mur pengatur jarak 20mm untuk menjauhkan poros motor sehingga nanti saya dapat menempatkan puli sabuk di dekat kaki.
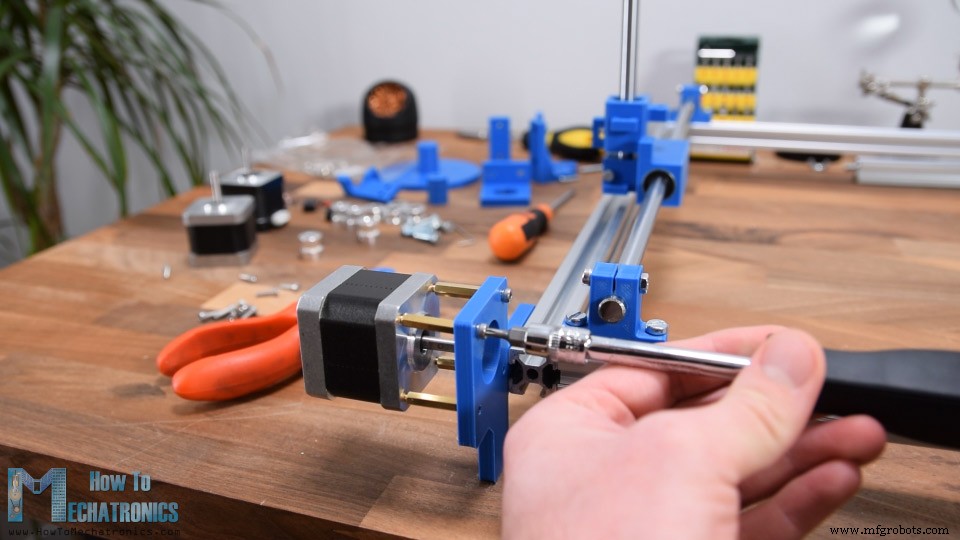
Ok jadi selanjutnya saya memiliki batang ulir 6mm sederhana yang akan menggerakkan dua sabuk pada saat yang bersamaan. Jadi pertama-tama saya memotongnya sesuai ukuran, menempatkan bantalan dengan diameter dalam 6mm pada kaki stepper yang berlawanan dan melewati batang berulir melaluinya. Kemudian saya memasukkan mur untuk mengencangkan batang ke bantalan dan dua katrol bergigi untuk sabuk.
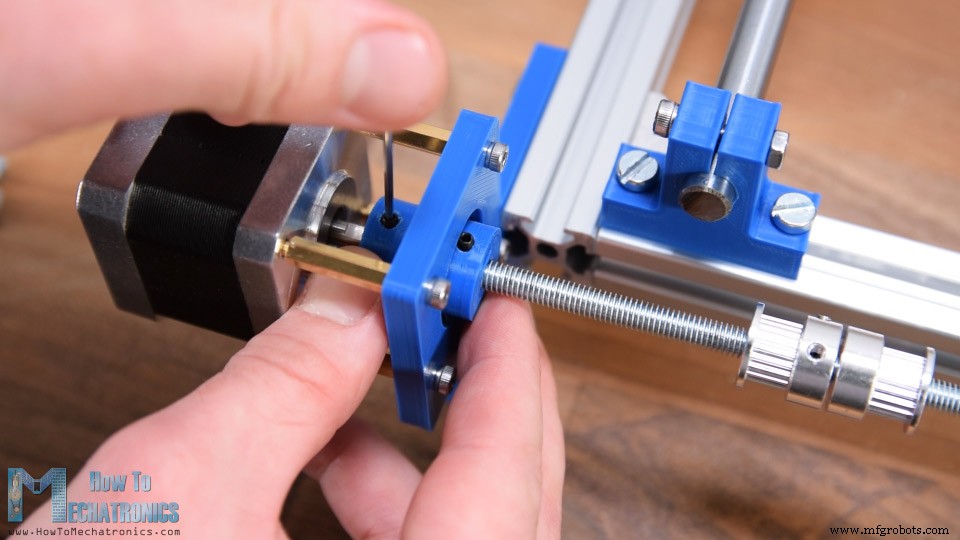
Untuk menghubungkan batang berulir ke motor stepper, saya mencetak 3D poros coupler dengan lubang 5 mm di sisi stepper dan lubang 6 mm di sisi batang. Coupler poros memiliki slot untuk memasukkan mur M3, dan kemudian menggunakan baut M3 atau sekrup grub kita dapat dengan mudah mengamankannya ke poros motor dan batang berulir. Selanjutnya, kita perlu memposisikan katrol sejajar dengan pegangan balok geser dan juga mengencangkannya dengan sekrup grub.
Di sisi berlawanan dari mesin kita dapat memasukkan dua katrol pemalas. Saya menggunakan beberapa baut dan mur M5 untuk tujuan itu.
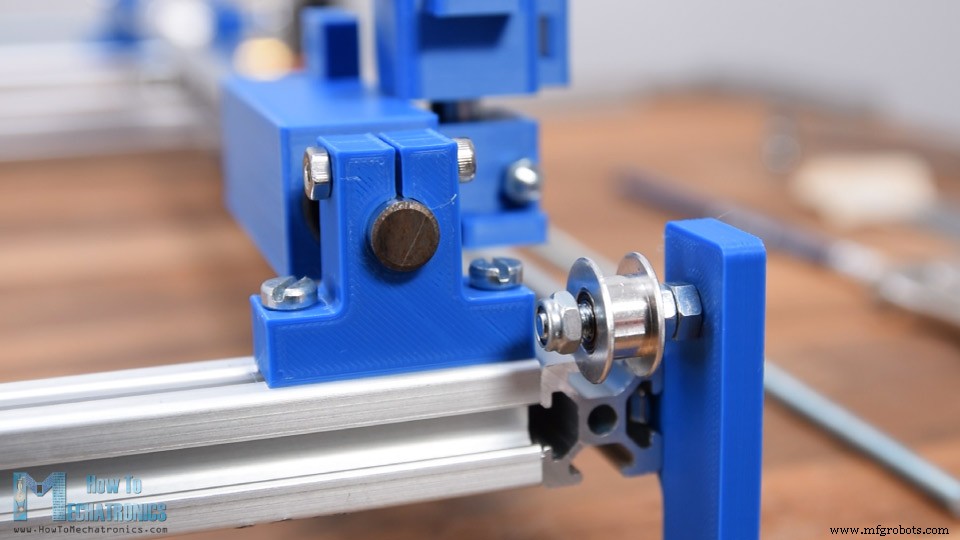
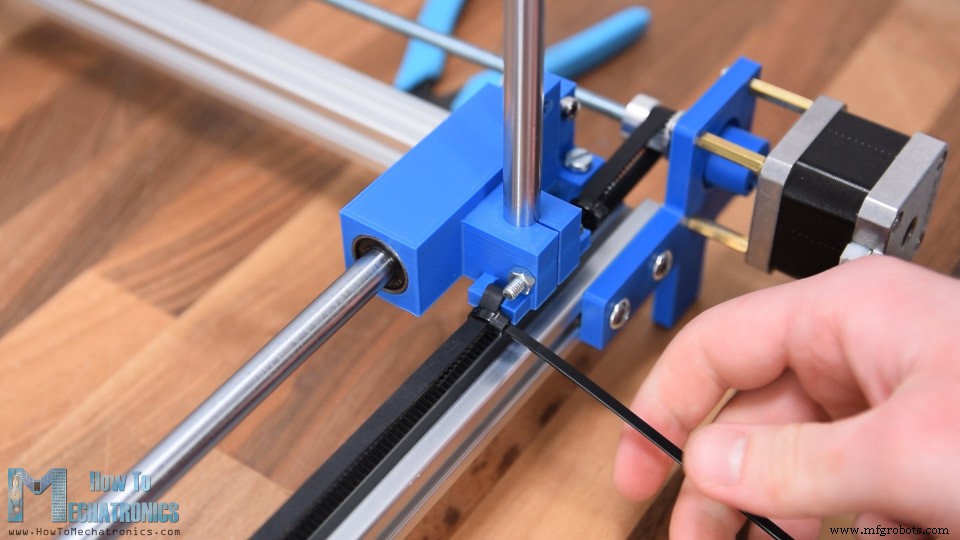
Ok jadi sekarang kita siap memasang sabuk GT2 untuk sumbu X. Pertama, saya memasukkan dan mengamankan sabuk ke blok geser dengan bantuan dasi ritsleting. Kemudian saya melewati sabuk di sekitar katrol gigi, di sisi lain di sekitar katrol pemalas, memotongnya ke ukuran yang sesuai dan sekali lagi mengamankannya ke sisi lain blok geser menggunakan dasi ritsleting.
Saya mengulangi proses ini untuk sisi lain juga. Saat mengamankan sisi lain, kita harus memastikan bahwa kedua balok geser berada pada posisi yang sama pada sumbu X. Untuk tujuan itu, kita cukup memindahkannya ke ujung rel sehingga kita bisa mengencangkan ikat pinggang dan mengamankannya dengan dasi ritsleting. Dengan ini mekanisme geser sumbu X selesai.
Terkait: Plotter Pena DIY dengan Pengubah Alat Otomatis | Mesin Gambar CNC
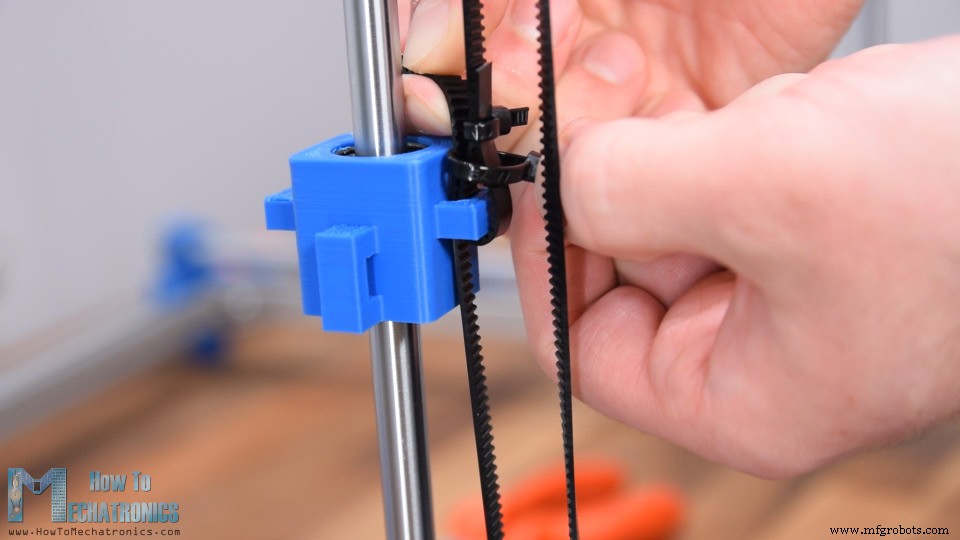
Selanjutnya dengan cara yang sama kita akan merakit mekanisme sumbu Y. Untuk mengamankan sabuk ke blok geser lagi kami menggunakan ikatan zip. Di sini blok geser hanya memiliki satu pegangan dan untuk mengamankan sabuk, pertama-tama saya mengikat salah satu ujung sabuk, kemudian saya meregangkan sabuk agar cukup kencang dan dengan ikatan lain saya menangkap kedua ujung sabuk. Sekarang saya bisa melepas dasi zip sebelumnya dan memotong sabuk berlebih. Seperti disebutkan sebelumnya, saat mengamankan sabuk di sisi lain, kita harus memastikan bahwa kedua balok geser berada pada posisi yang sama pada sumbu Y. Dengan ini mekanisme sumbu Y juga dilakukan.
Selanjutnya, saya akan melampirkan satu lagi profil slot-T di sumbu X. Profil ini akan berfungsi untuk memasang motor stepper ke-3 padanya serta untuk menempatkan potongan busa di atasnya. Dengan motor stepper ke-3 kita bisa membuat 2.5D atau sebenarnya bentuk tiga dimensi dengan mesin ini, seperti misalnya bidak catur.
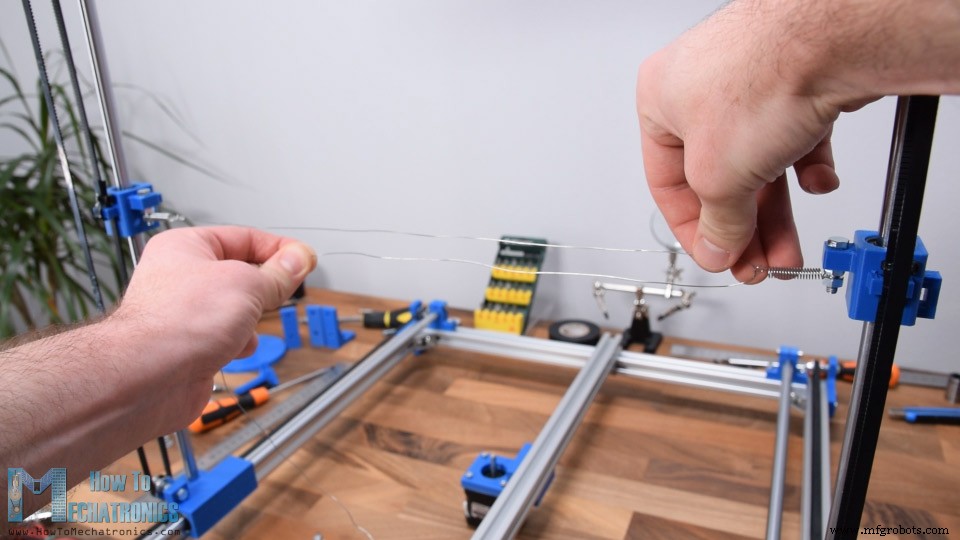
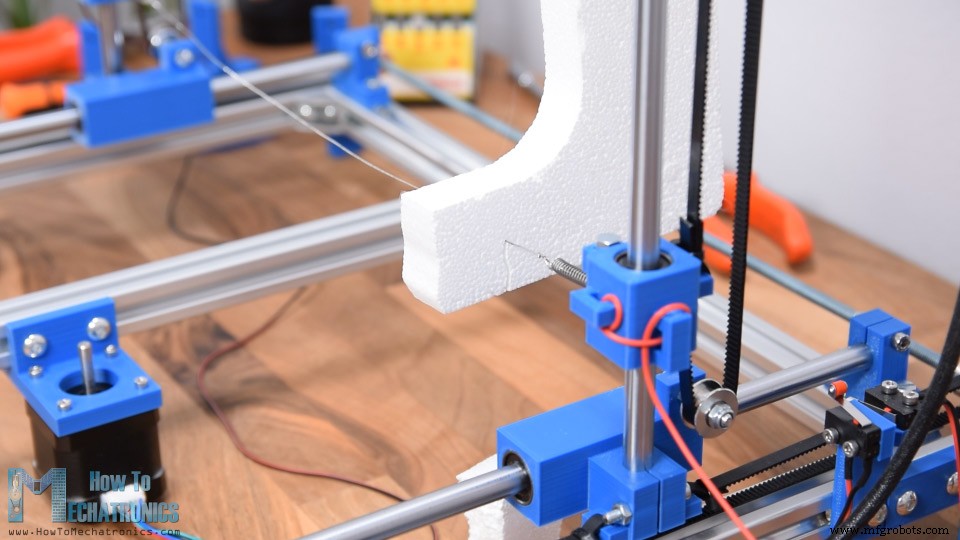
Baiklah, jadi selanjutnya kita perlu memasang kabel resistansi. Kawat ini harus mampu menahan panas tinggi sambil mempertahankan suhu yang seragam di seluruh panjangnya. Itu biasanya kawat Nichrome atau kawat pancing stainless steel yang sebenarnya murah dan mudah didapat. Agar berfungsi dengan baik, kawat perlu dikencangkan di antara dua menara atau balok geser dan inilah cara saya melakukannya. Saya memasang baut M5 di kedua blok geser dan menambahkan pegas ekstensi kecil ke sana.
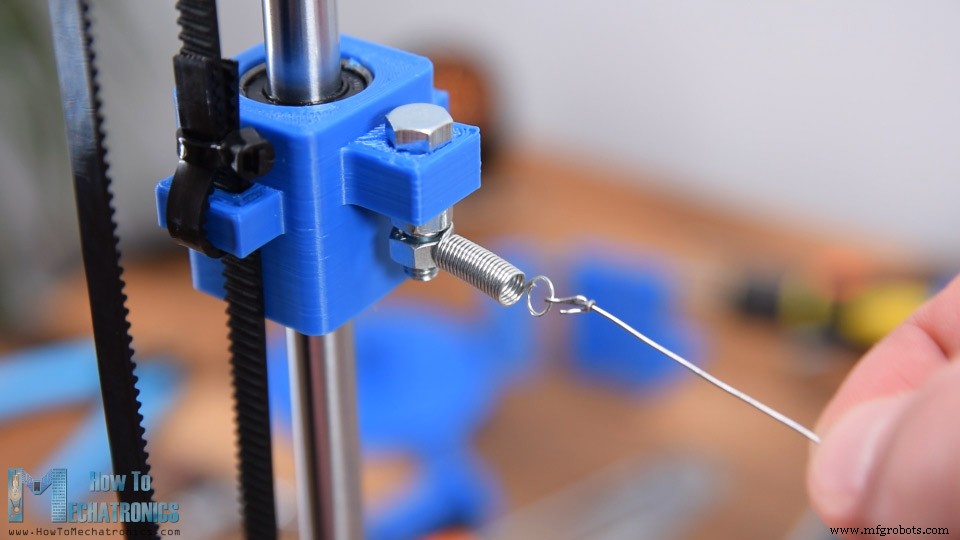
Lalu saya cukup memasang kawat ke pegas. Saya mengencangkan kawat sebanyak yang diizinkan pegas. Kawat perlu dikencangkan seperti ini dengan pegas karena ketika menjadi panas ia juga akan memperpanjang panjangnya sehingga pegas dapat mengimbanginya.
Ok, jadi selanjutnya kita bisa menghubungkan kabel resistansi dengan kabel listrik. Kami akan menggunakan daya DC sehingga polaritasnya tidak masalah, yang penting arus mengalir melalui kawat agar menjadi panas. Di sini pastikan kabel listrik Anda cukup centang untuk mendukung penarikan arus sekitar 3 hingga 5 amp. Dalam kasus saya, saya menggunakan kabel 22-gauge tetapi saya akan menyarankan kawat 20- atau 18-gauge untuk memastikannya.
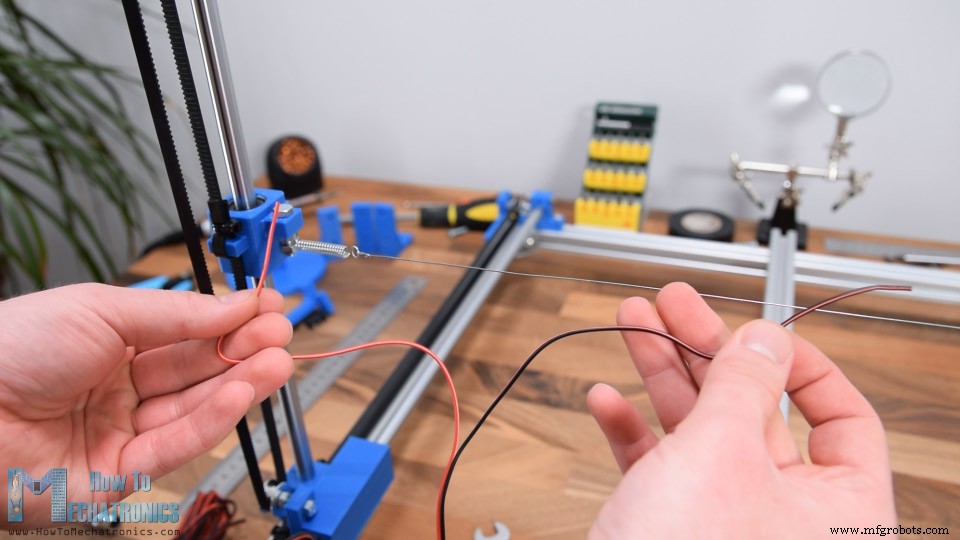
Awalnya saya memasang kabel listrik di antara kedua mur, sehingga arus bisa melewati koil ke kabel resistansi. Ini sebenarnya tidak bekerja dengan baik dan saya akan menunjukkan alasannya sebentar lagi. Saya mengarahkan kawat melalui pegangan balok geser agar tetap rapi dan jauh dari kawat panas.
Selanjutnya, kita perlu memasang end-stop atau limit switch mesin CNC. Saklar batas mikro ini memiliki 3 koneksi, Ground, koneksi normal terbuka dan koneksi normal tertutup. Awalnya saya menghubungkannya ke koneksi Biasanya Terbuka tetapi setelah con
melakukan beberapa pengujian, saya beralih ke koneksi yang biasanya tertutup karena dengan cara itu mesin bekerja lebih stabil.
Masalahnya adalah kebisingan listrik yang dihasilkan saat mesin CNC bekerja yang secara salah memicu sakelar seperti ditekan dan menyebabkan mesin berhenti bekerja.
Diagram Sirkuit Pemotong Busa CNC Arduino
Selanjutnya, kita dapat menghubungkan kabel motor stepper dan kemudian melihat bagaimana menghubungkan semua komponen elektronik. Berikut adalah diagram sirkuit tentang bagaimana segala sesuatu perlu dihubungkan.
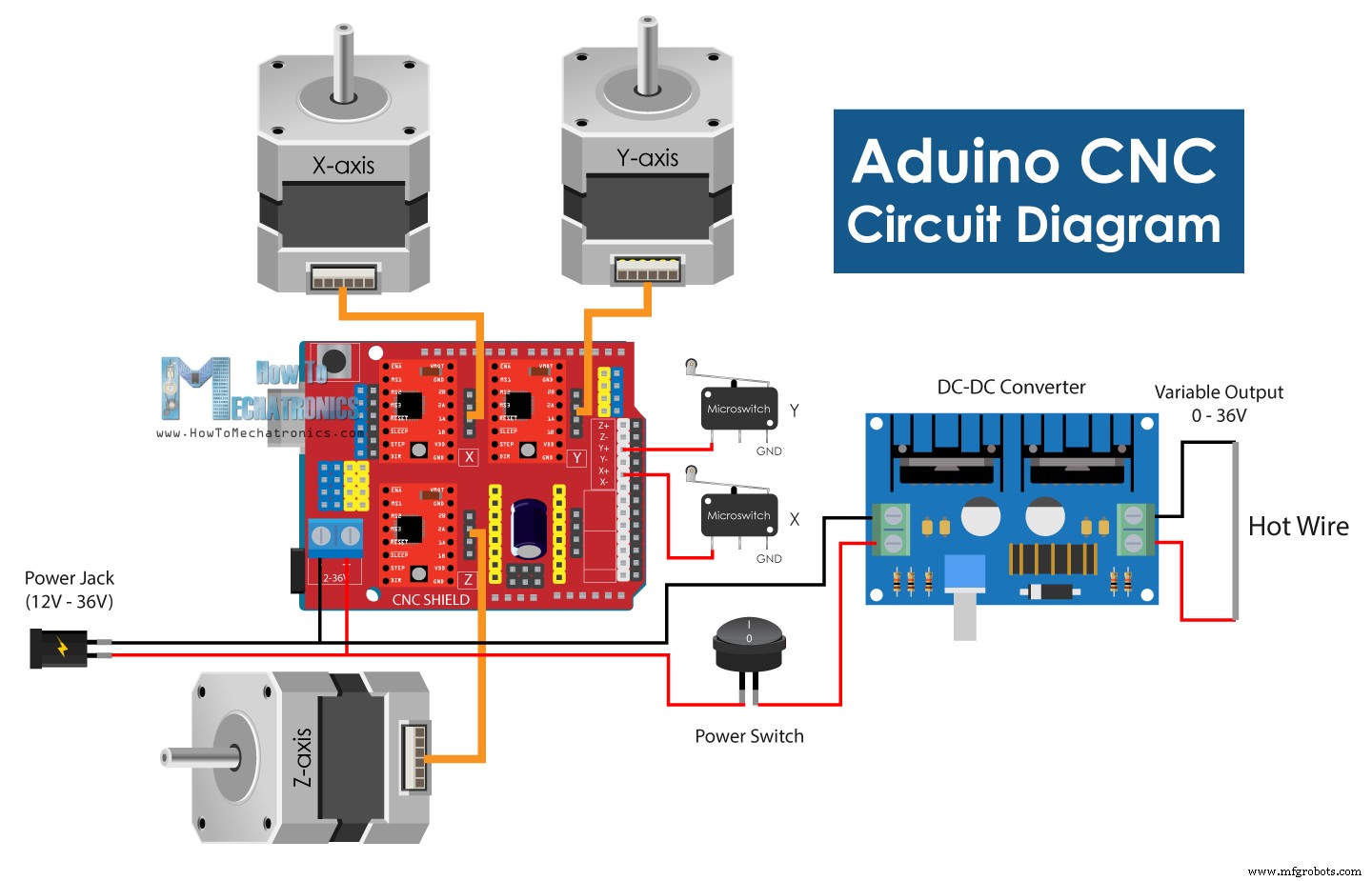
Tentu saja, otak dari mesin CNC ini adalah papan Arduino. Bersamaan dengan itu kita juga membutuhkan Arduino CNC Shield, tiga driver stepper A4988 dan konverter DC ke DC untuk mengontrol suhu kabel panas.
Anda bisa mendapatkan komponen yang dibutuhkan untuk proyek ini dari tautan di bawah ini:
- Motor Stepper – NEMA 17…………
- A4988 Stepper Driver……………….…
- Perisai CNC Arduino …………………….. Amazon / Bagus / AliExpress
- Arduino Uno……………………………..…
- Konverter DC-DC …………………………
- Limit Switch ………………………………….. Amazon / Bagus / AliExpress
- Pasokan Daya DC ………………………… Amazon / Banggood / AliExpress
Saya 3D mencetak dudukan untuk komponen elektronik yang saya kencangkan ke satu sisi profil slot-T. Dengan menggunakan baut M3, saya mengamankan papan Arduino ke dudukannya terlebih dahulu, lalu memasang pelindung Arduino CNC di atasnya.
Selanjutnya, kita perlu memilih resolusi di mana driver stepper akan menggerakkan motor menggunakan beberapa jumper. Dalam kasus saya, saya memilih resolusi langkah ke-16 dengan menambahkan tiga jumper ke setiap driver sehingga stepper akan memiliki gerakan yang lebih halus.
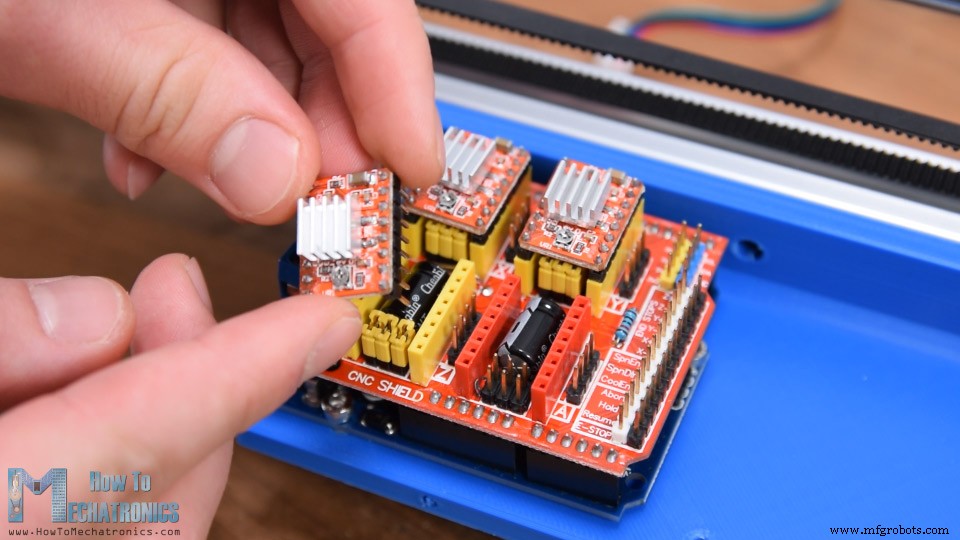
Saat menempatkan driver, pastikan orientasinya benar, potensiometer kecil dapat menjadi indikator yang harus diorientasikan ke sisi bawah pelindung.
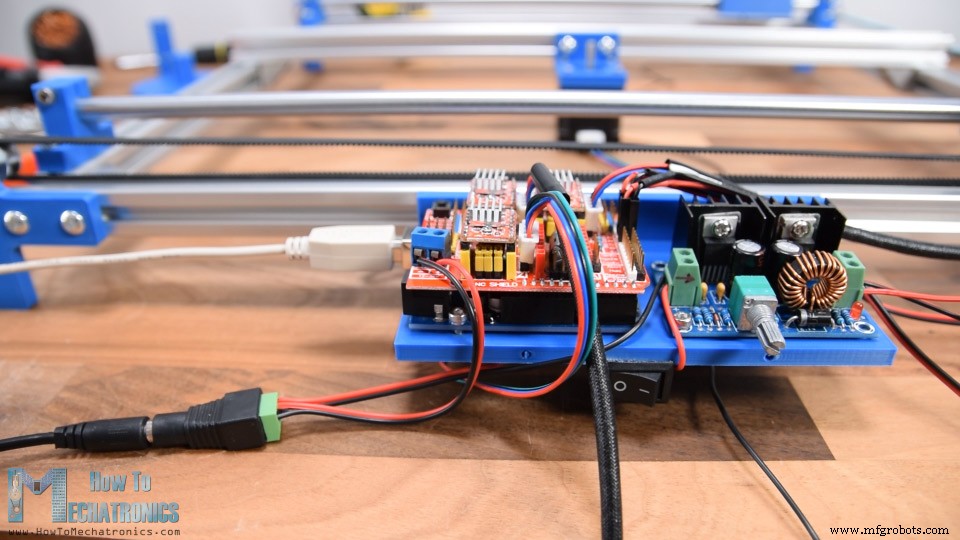
Saya melanjutkan dengan mengamankan konverter DC di tempatnya. Kemudian saya menghubungkan ketiga motor stepper ke pelindung Arduino CNC, serta dua sakelar batas ke pin penghenti ujung X+ dan Y+. Untuk menyalakan mesin, saya akan menggunakan catu daya 12V 6A DC. Perisai Arduino CNC sebenarnya dapat bekerja dari 12 hingga 36 volt dan juga konverter DC tertentu yang saya gunakan dapat bekerja dengan voltase yang sama. Pada input Konverter DC saya menambahkan sakelar sehingga saya dapat menghidupkan dan mematikan kabel panas secara terpisah. Pada output konverter DC saya cukup menghubungkan dua kabel dari kedua ujung kabel resistansi. Terakhir, kita dapat menghubungkan dan memberi daya pada Arduino melalui port USB dan memberi daya pada pelindung Arduino CNC dan motor stepper melalui steker listrik DC.
Baiklah, jadi sekarang saatnya untuk menguji mesin apakah itu berfungsi dengan baik dan saya akan mulai dengan kabel panas. Anda dapat melihat di sini saya memiliki 0 volt pada input konverter DC, dan begitu saya menyalakan sakelar, saya mendapatkan 12V pada input. Kemudian pada output dari konverter DC lagi, kita memiliki voltase nol tetapi ketika kita mulai memutar potensiometer, kita dapat menyesuaikan tegangan output dari 0 hingga 12V sehingga arus mengalir melalui kabel panas dan suhunya tidak tepat waktu.
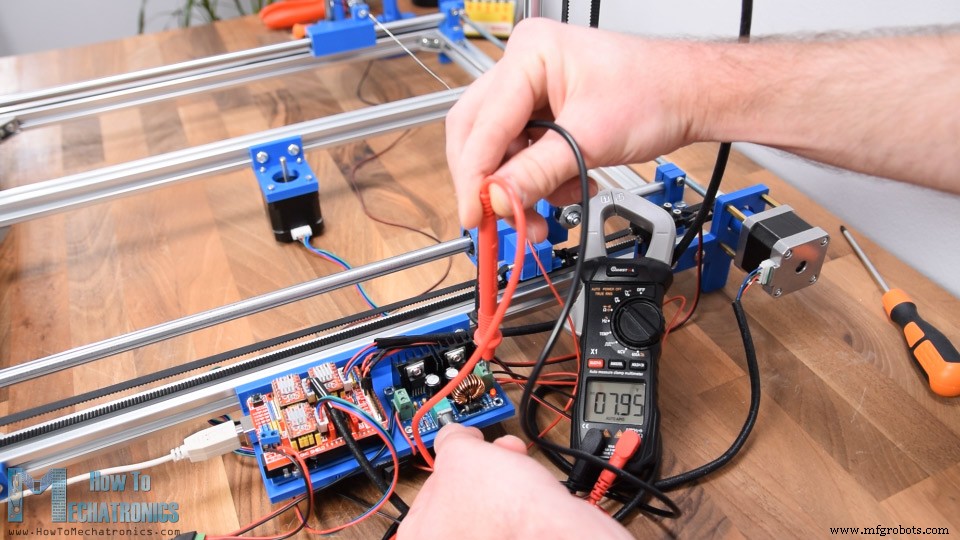
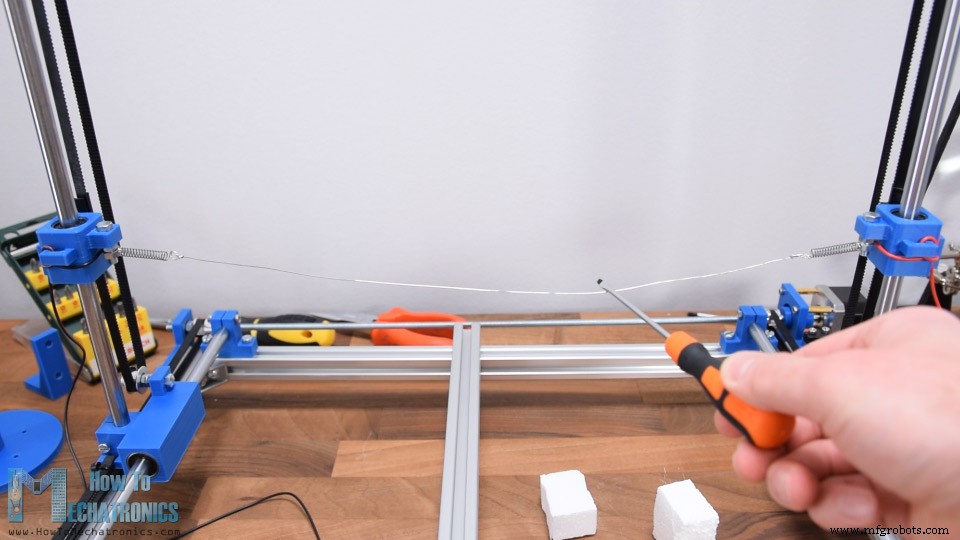
Cara terbaik untuk menguji pada tegangan berapa Anda harus mengatur output konverter DC adalah dengan mencoba memotong beberapa bagian busa. Kawat panas harus dapat memotong busa tanpa banyak hambatan dan tekukan.
Namun, setelah pengujian awal, Anda dapat melihat apa yang terjadi pada kabel panas saya. Itu diperpanjang karena panas dan mata air yang seharusnya mengimbanginya tidak berfungsi.
Sebenarnya, pegas kehilangan fungsinya karena terlalu panas, karena dengan konfigurasi ini arus juga mengalir melaluinya.

Jadi, saya mengganti pegas lama dengan yang baru, dan sekarang saya melewati pegas dengan menghubungkan kabel listrik langsung ke kabel resistansi dengan bantuan beberapa klem buaya.
Perangkat Lunak untuk Mesin CNC Arduino
Oke, jadi sekarang saatnya menghidupkan mesin ini dan menjadikannya mesin CNC yang sebenarnya.
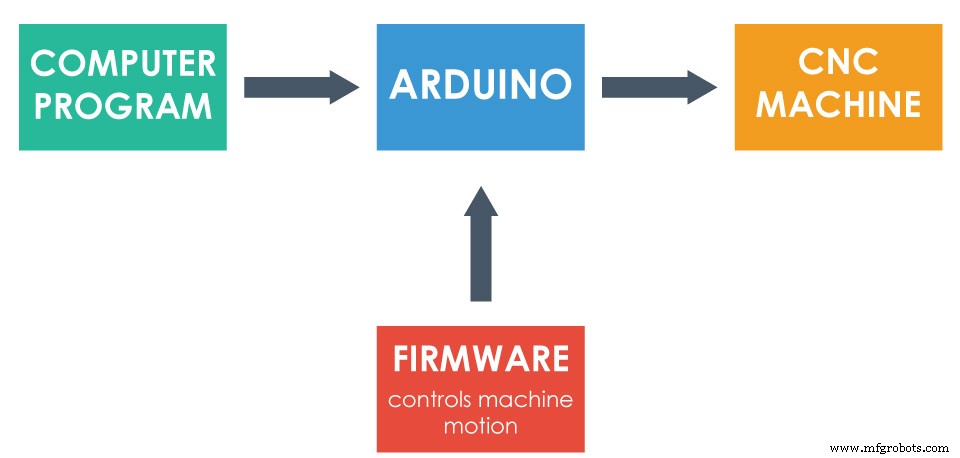
Untuk tujuan itu, pertama-tama kita perlu mengunggah firmware ke Arduino yang mengontrol gerakan mesin. Pilihan paling populer untuk mesin CNC DIY adalah firmware GRBL.
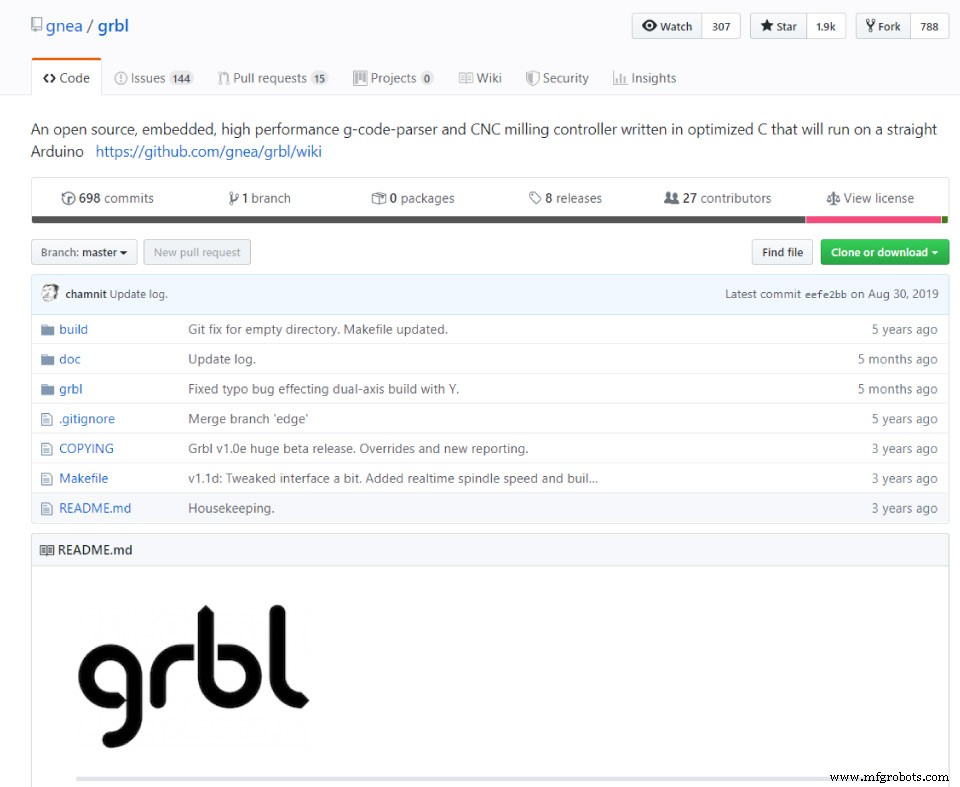
Ini open source dan kami dapat mengunduhnya dari GitHub.com. Setelah kami mengunduhnya sebagai file zip, kami dapat mengekstraknya, menyalin folder "grbl" dan menempelkannya ke direktori perpustakaan Arduino. Kemudian kita bisa membuka Arduino IDE dan dari File> Contoh> grbl pilih contoh grblUpload. Sekarang kita perlu memilih papan Arduino yang kita gunakan, Arduino UNO, dan pilih port COM yang terhubung dengan Arduino kita dan akhirnya unggah sketsa ini ke Arduino. Setelah diunggah, sekarang Arduino tahu cara membaca kode-G dan cara mengontrol mesin sesuai dengan itu.
Selanjutnya, kita memerlukan semacam antarmuka atau pengontrol yang akan berkomunikasi dan memberi tahu Arduino apa yang harus dilakukan. Sekali lagi, saya memilih program sumber terbuka untuk tujuan itu dan itu adalah Pengirim G-Code Universal.

Saya mengunduh versi Platform 2.0. Untuk menjalankan program, kita perlu mengekstrak file zip, buka folder "bin" dan buka salah satu file ugsplatfrom yang dapat dieksekusi. Ini sebenarnya adalah program JAVA, jadi untuk dapat menjalankan program ini terlebih dahulu kita perlu menginstal JAVA Runtime Environment. Kami juga dapat mengunduh ini secara gratis dari situs resminya.
Jadi, setelah kita membuka program Universal G-Code Sender, pertama-tama kita perlu menjalankan Setup wizard untuk mengonfigurasi mesin.
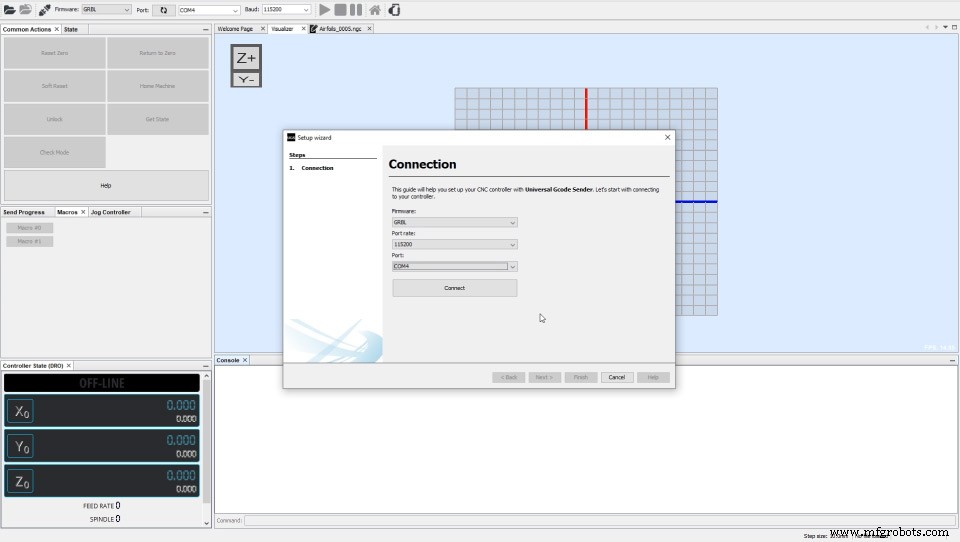
Di sini kita hanya perlu memilih Port yang tepat dan menghubungkan program ke Arduino. Setelah koneksi dibuat, kita dapat memeriksa arah pergerakan motor dengan mengklik tombol. Jika perlu kita bisa membalikkan arah. Saya memilih gerakan positif untuk berpindah dari posisi awal di mana sakelar batas berada di sisi lain.
Selanjutnya, kita perlu mengkalibrasi langkah-langkah motor untuk mencapai gerakan yang benar dan akurat. Saat kami memilih tanggal 16
resolusi langkah pada driver, dan motor memiliki 200 langkah fisik, itu berarti akan mengambil 3200 langkah agar motor membuat gerakan 360 derajat penuh. Sekarang tergantung pada jenis transmisi, atau dalam hal ini ukuran puli, kita perlu menghitung jumlah langkah yang dibutuhkan motor agar mesin bergerak 1 mm. Nilai default di sini diatur ke 250 langkah per mm. Jadi, begitu kita mengklik salah satu tombol gerak ini, motor akan membuat 250 langkah.
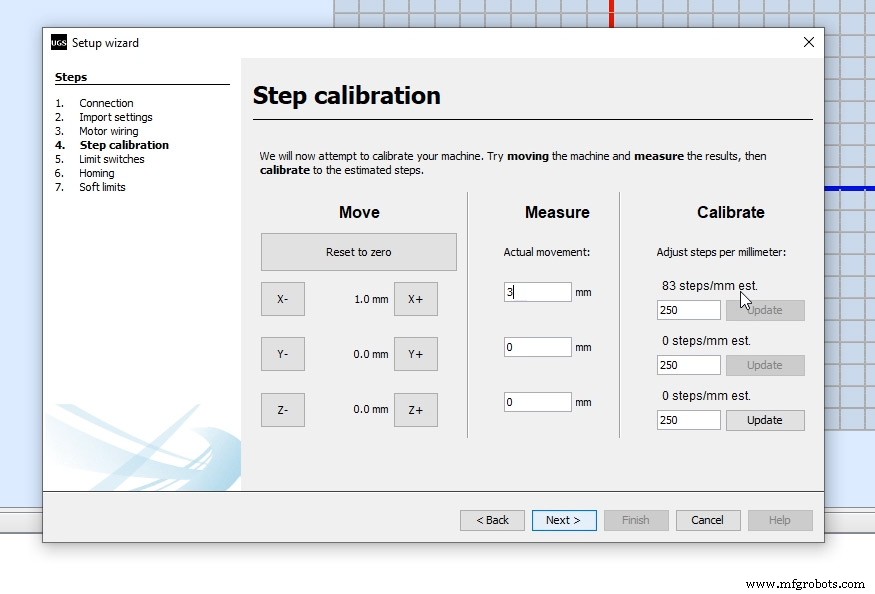
Sekarang pada kenyataannya, menggunakan penggaris kami mengukur gerakan sebenarnya yang dibuat mesin dan kami memasukkan angka itu di sini dalam program. Menurut ini, program akan menghitung dan memberi tahu kami nilai yang harus kami ubah dan perbarui parameter langkah/mm. Dalam kasus saya itu 83 langkah/mm. Untuk sumbu Z, saya set ke 400 langkah/mm, atau itu berarti nilai 1mm untuk sumbu Z akan membuat rotasi 45 derajat.
Selanjutnya, kita perlu memeriksa apakah sakelar batas berfungsi dengan baik. Tergantung apakah kita telah menghubungkannya NO atau NC, kita juga dapat membalikkannya di sini. Seperti yang saya katakan sebelumnya, koneksi NC bekerja lebih baik untuk saya. Bagaimanapun, di sini kita perlu memperhatikan bahwa kita perlu mematikan sakelar batas sumbu Z karena kita tidak memilikinya di mesin kita. Jika kami tidak mematikannya, kami tidak akan dapat menghidupkan mesin tersebut. Untuk melakukan itu, kita perlu membuka folder grbl di perpustakaan Arduino, dan mengedit file config.h.
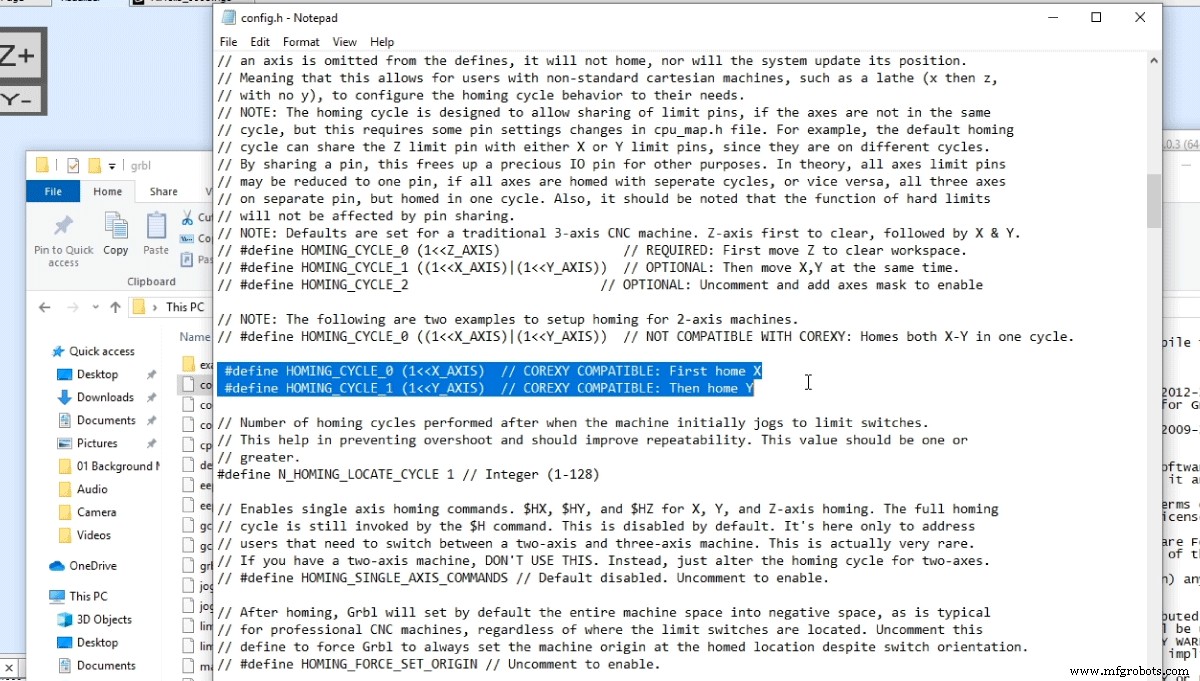
Di sini kita perlu menemukan garis siklus homing dan mengomentari set default untuk mesin CNC 3 sumbu dan menghapus komentar pengaturan untuk mesin 2 sumbu. Sekarang kita perlu menyimpan file dan mengupload ulang contoh grblUpload ke Arduino. Perhatikan bahwa Anda mungkin harus memulai ulang program lagi agar semuanya berfungsi dengan baik.
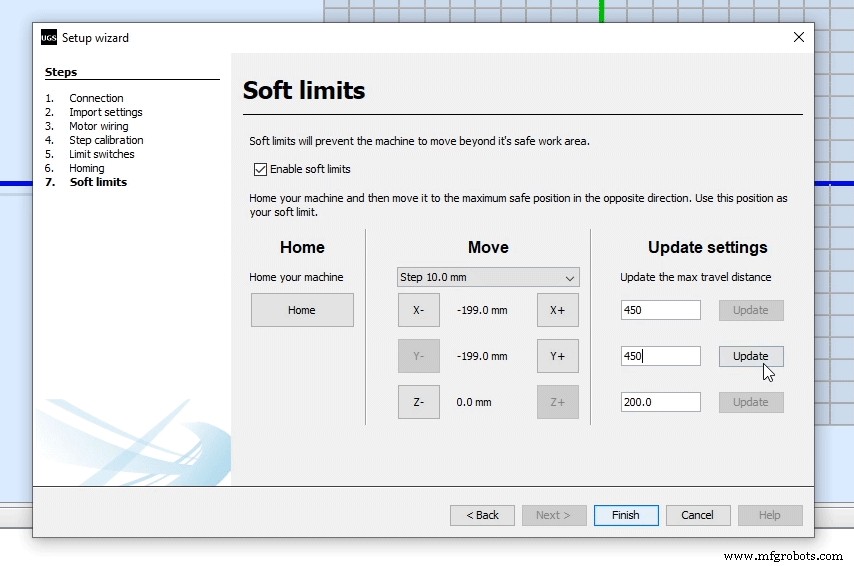
Baiklah, jadi selanjutnya kita bisa mencoba menghidupkan mesin menggunakan tombol Coba homing. Ketika diklik, mesin harus mulai bergerak menuju sakelar batas X, dan sekali ditekan, ia akan mulai menggerakkan sumbu Y. Jika diperlukan kita dapat mengubah arah limit switch. Di akhir wizard pengaturan, kita dapat mengatur Batas Lunak yang sebenarnya membatasi jarak maksimum yang dapat ditempuh mesin di setiap arah. Dalam kasus saya, itu adalah 45x45cm.
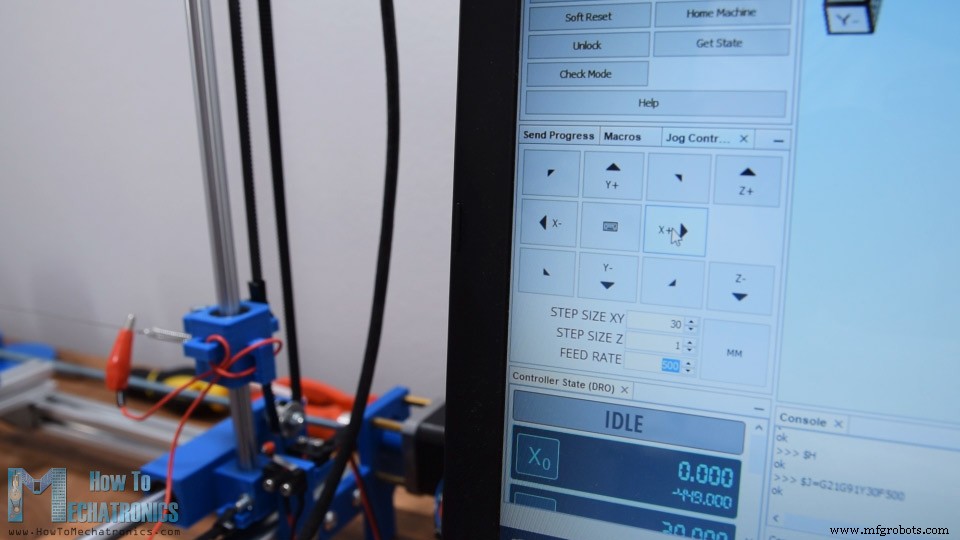
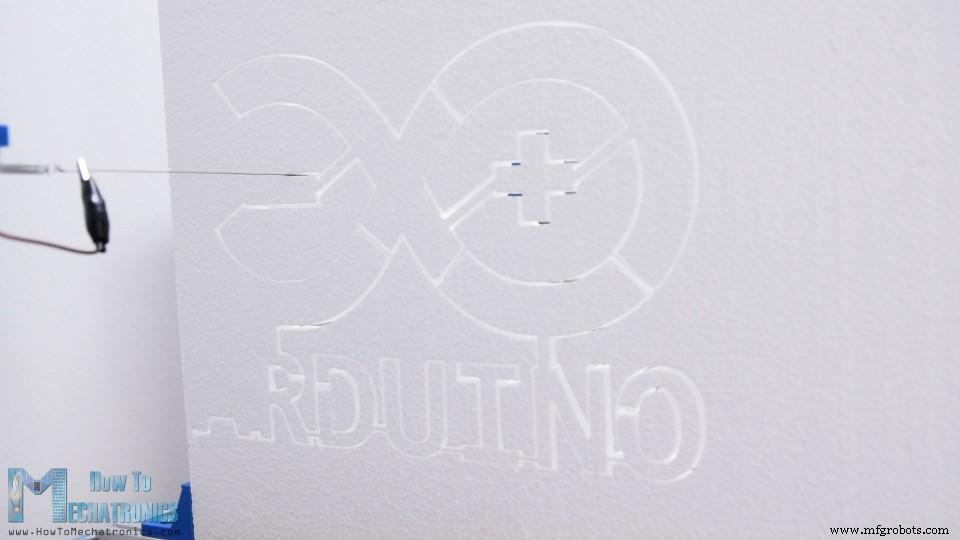
Ok jadi sekarang program sudah siap untuk bekerja. Sebelum setiap penggunaan, Anda harus selalu Rumah mesin dan kemudian Anda dapat melakukan apa pun yang Anda inginkan. Pertama, saya sarankan untuk bermain-main dan menguji pengontrol Jog atau memindahkan mesin secara manual. Selain itu, pada titik ini Anda harus mencoba memotong beberapa bagian busa untuk mengetahui laju umpan atau kecepatan gerakan yang paling sesuai untuk Anda.
Jadi, Anda harus bermain-main dengan suhu kawat panas dan kecepatan pengumpanan untuk mengetahui apa yang akan membuat potongan busa Anda paling bersih dan presisi.
Membuat kode-G untuk Mesin CNC
Terakhir, apa yang tersisa dari video ini adalah melihat bagaimana mempersiapkan gambar sehingga mesin CNC dapat membuat bentuk dari gambar tersebut. Untuk itu, kita memerlukan software grafik vektor, dan sekali lagi, saya memilih yang open source, yaitu Inkscape. Anda dapat mengunduhnya dari situs resminya secara gratis.
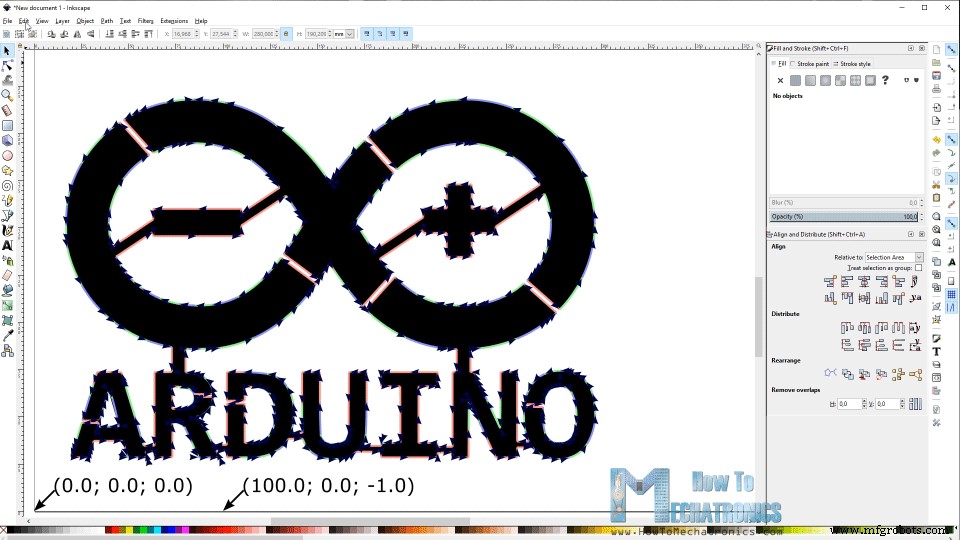
Saya akan menunjukkan dua contoh bagaimana mempersiapkan G-code untuk mesin CNC Arduino menggunakan Inkscape. Jadi pertama-tama kita harus mengatur ukuran halaman dengan ukuran area kerja kita yaitu 45x45cm. Untuk contoh pertama saya download dan gambar logo Arduino dan diimpor ke dalam program. Menggunakan fungsi Trace Bitmap, kita perlu mengonversi gambar ke format vektor.
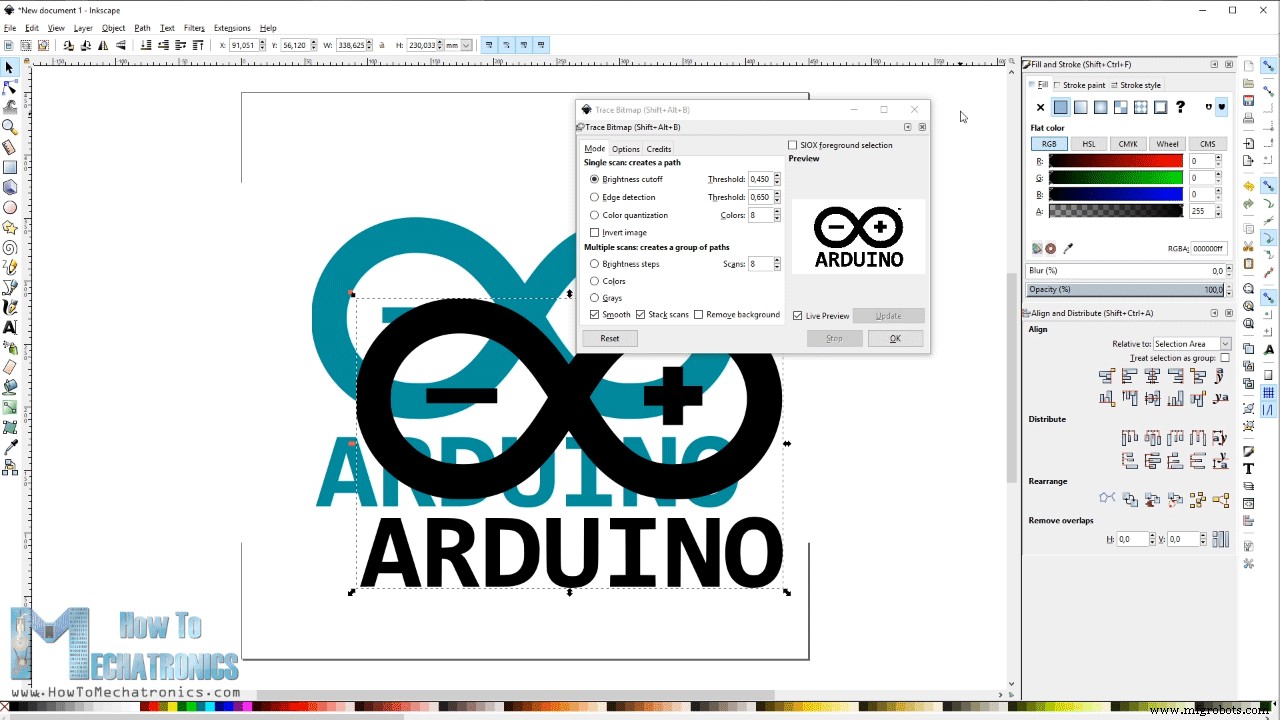
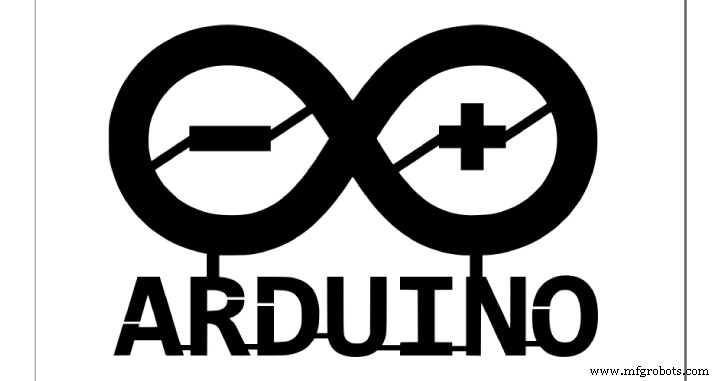
Sekarang agar dapat memotong bentuk ini dengan kawat panas, kita perlu membuat bentuknya menjadi jalur yang kontinu. Itu karena kawat panas selalu ada di area kerja, tidak dapat dinaikkan seperti misalnya sedikit atau dimatikan dalam kasus laser, saat bepergian dari satu ke huruf atau bentuk lainnya. Jadi oleh karena itu, dengan menggunakan kotak sederhana saya menghubungkan semua bagian yang terpisah menjadi satu. Kami melakukannya dengan memilih potongan dan kemudian menggunakan fungsi Union. Di sisi lain, loop tertutup bagian dalam perlu dibuka dan kita melakukannya menggunakan fungsi Difference.
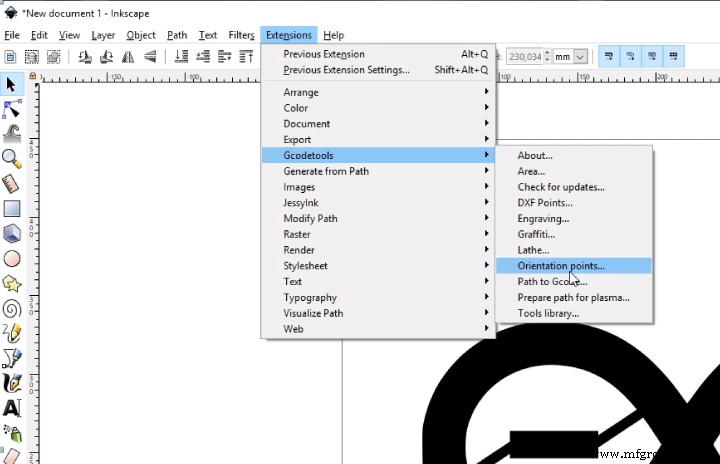
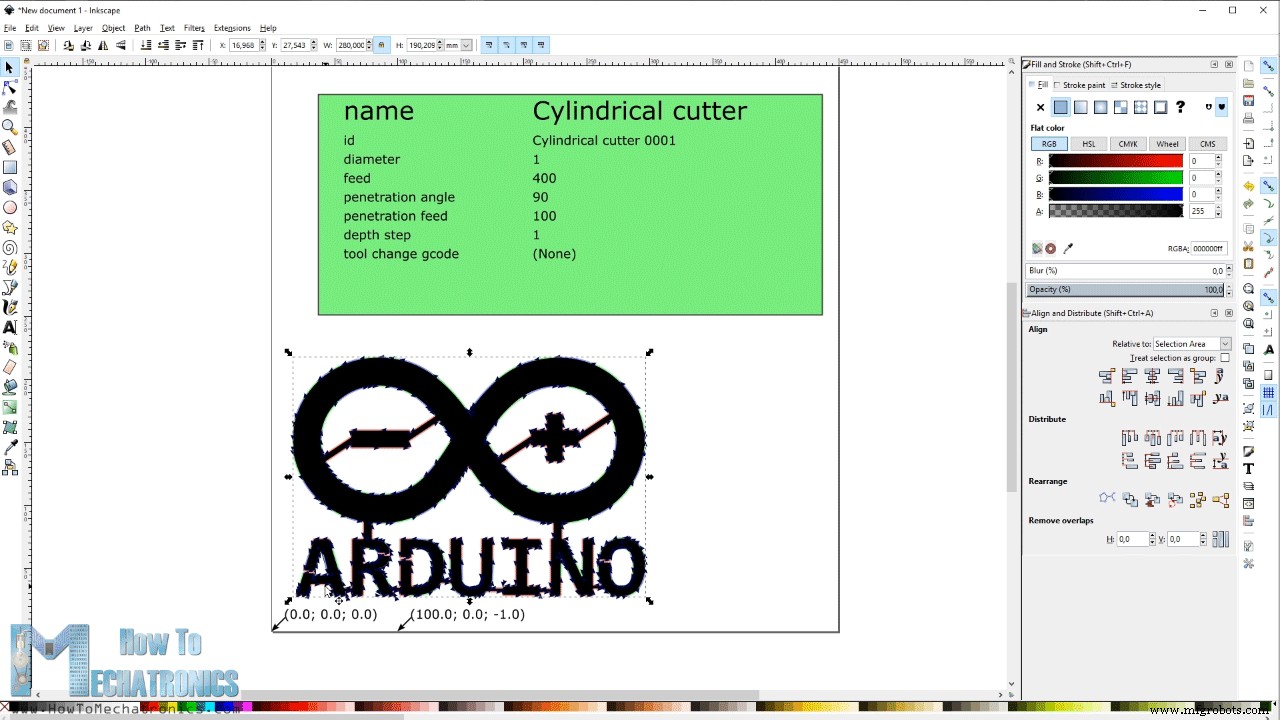
Jadi, setelah gambar kita siap, kita dapat menggunakan ekstensi Gcodetools untuk menghasilkan G-code. Pertama, kita perlu membuat titik Orientasi.
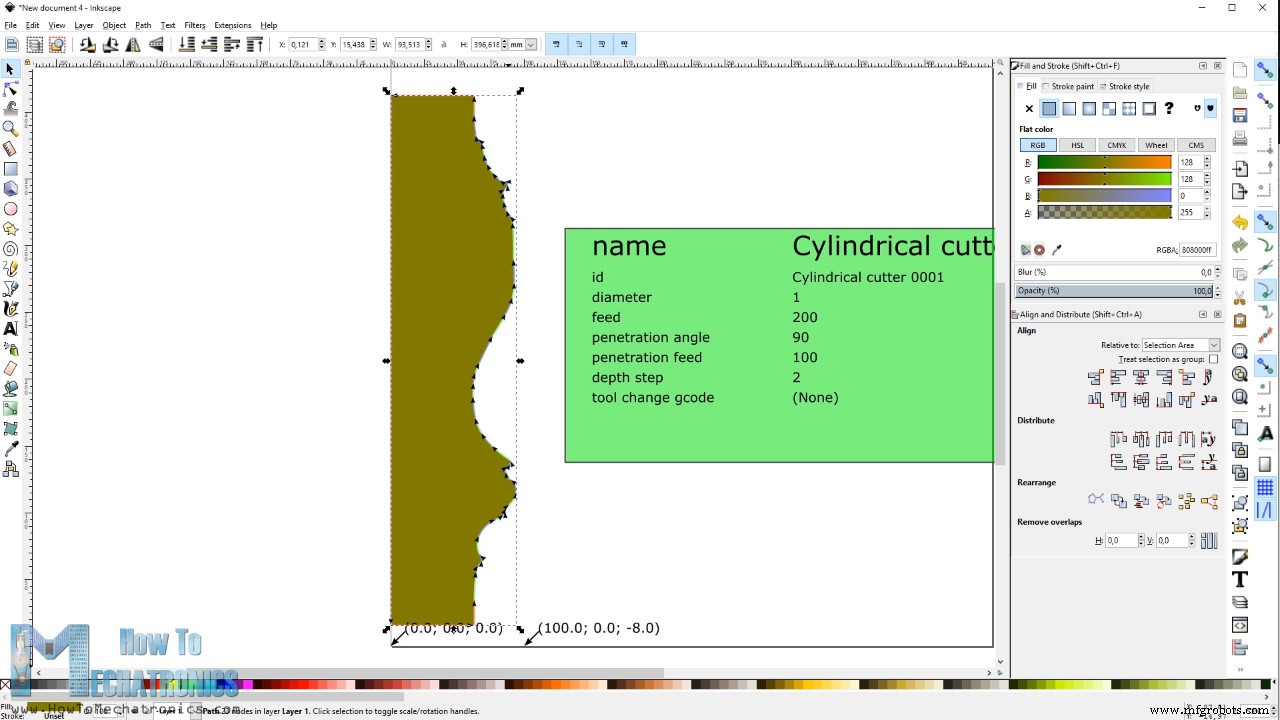
Kemudian kita dapat menskalakan model kita ke ukuran yang diinginkan. Selanjutnya, kita perlu pergi ke perpustakaan alat dan dengan ini menentukan alat yang kita gunakan untuk mesin CNC Arduino. Kita dapat memilih silinder karena kawat jelas memiliki bentuk silinder. Di sini kita dapat mengubah parameter seperti diameter alat, saya mengaturnya ke 1mm, serta laju umpan. Parameter lain tidak penting saat ini. Terakhir, sekarang kita dapat membuat G-code untuk bentuk ini menggunakan fungsi Path to Gcode.
Kode-G hanyalah sekumpulan instruksi yang dapat dipahami oleh GRBL atau Arduino dan menurut mereka menggerakkan motor stepper. Jadi sekarang, kita dapat membuka Gcode di program pengirim G-code Universal dan melalui jendela Visualizer kita dapat melihat jalur yang harus dilalui mesin.
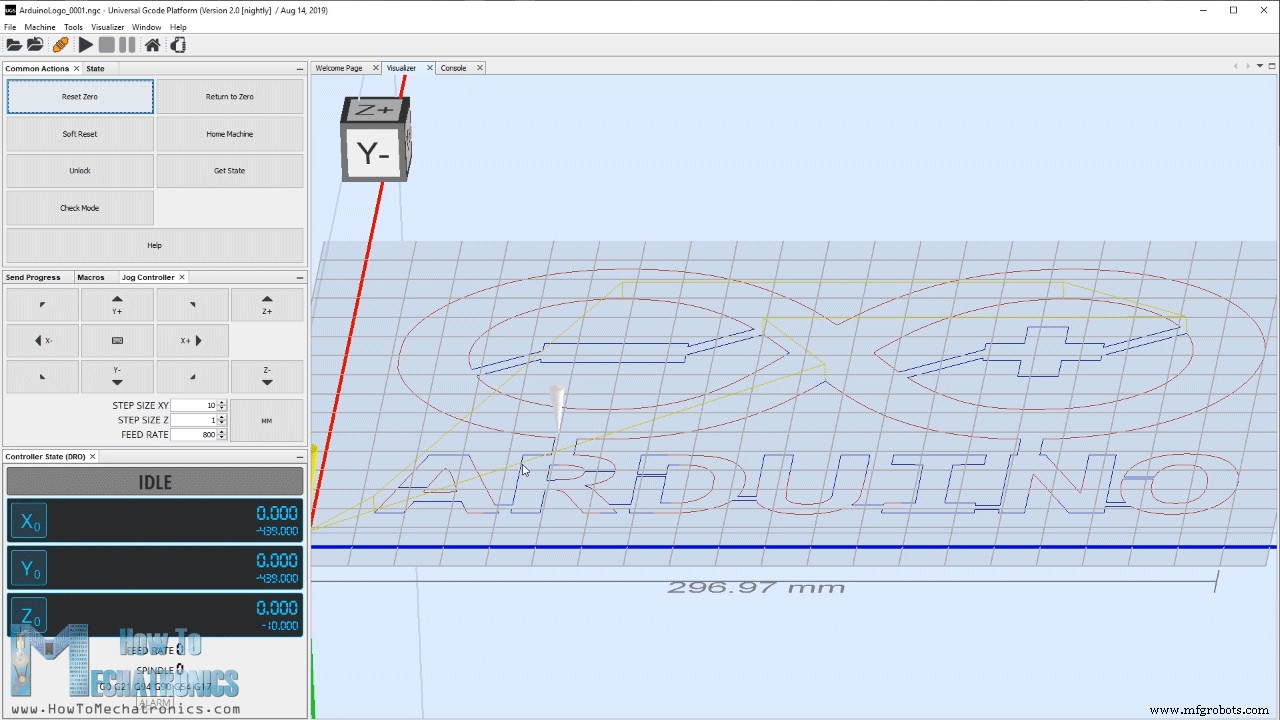
Namun, kita dapat melihat di sini garis kuning yang mewakili perjalanan kosong, atau perjalanan melalui udara jika menggunakan bit atau laser. Seperti yang saya sebutkan sebelumnya, dalam hal ini kawat panas tidak dapat bergerak dalam perjalanan ini, karena kawat akan memotong material dan merusak bentuknya. Di sini kita benar-benar dapat melihat bahwa kita tidak memiliki satu jalur pun untuk keseluruhan bentuk karena kita lupa membuka area tertutup di dalam logo. Jadi, kita bisa kembali ke gambar, membuat area tertutup ini terbuka dan kemudian membuat G-code lagi.
Satu hal lagi yang perlu disebutkan bahwa ada baiknya untuk memilih titik awal Anda sendiri dengan mengklik dua kali bentuk, pilih Node dan pilih Break path di node yang dipilih. Sekarang jika kita membuka G-code yang baru, kita dapat melihat bahwa jalur dimulai dari A kemudian, melewati seluruh bentuk, dan berakhir kembali pada huruf A.
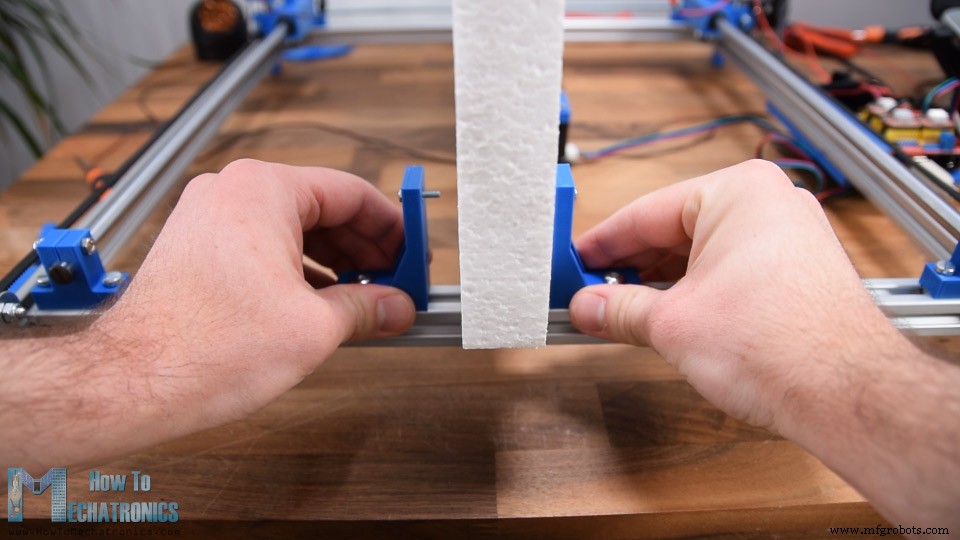
Untuk mengamankan potongan busa ke mesin CNC saya membuat pemegang sederhana ini yang memiliki baut M3 yang menembus busa dan menahannya di tempatnya.
Ok, jadi sekarang saya akan menunjukkan satu lagi contoh cara membuat bentuk tiga dimensi. Kami akan membuat bentuk pilar persegi yang perlu dipotong di empat sisi 90 derajat dari satu sama lain.
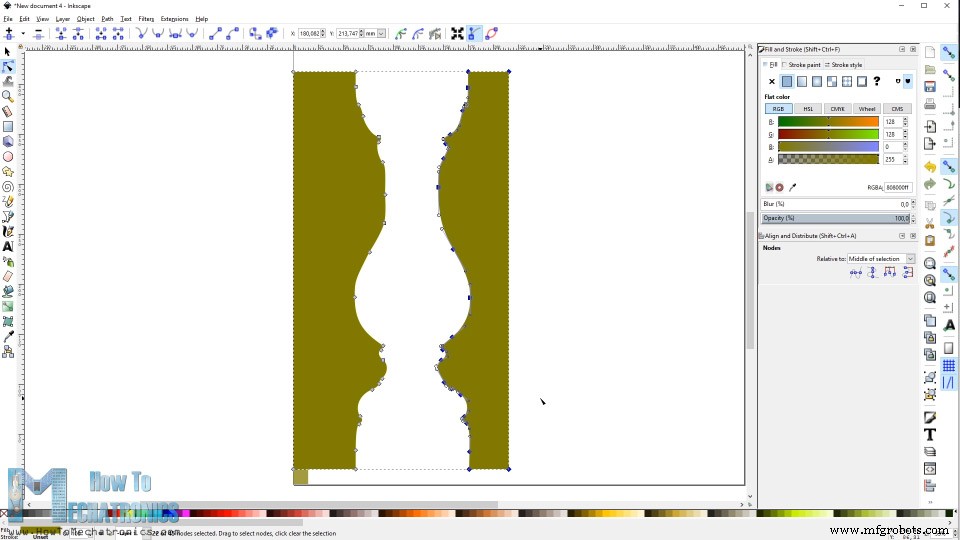
Saya mendapatkan bentuk pilar dengan metode Trace Bitmap yang ditunjukkan sebelumnya. Sekarang kita bisa menggambar persegi panjang sederhana sebesar pilar dan kita akan mengurangi pilar dari persegi panjang. Kami akan menghapus salah satu sisi karena kami hanya membutuhkan satu jalur profil pilar. Jadi, ini adalah jalur sebenarnya yang harus dibuat oleh mesin CNC, dan setelah setiap lintasan, kita perlu memutar yang ke-3
stepper 90 derajat.
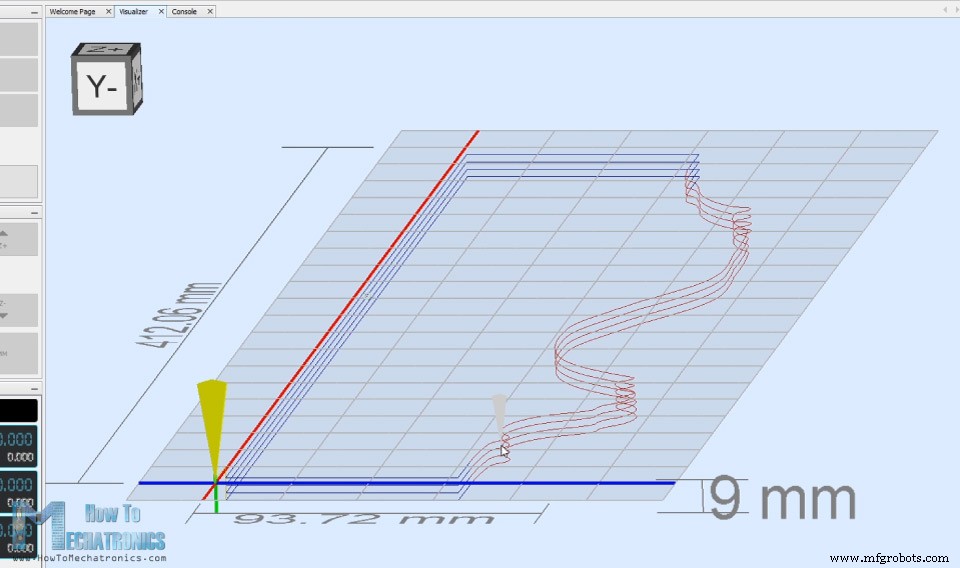
Untuk melakukan itu saat membuat titik Orientasi, kita perlu mengatur kedalaman Z ke -8mm. Kemudian pada parameter pahat kita perlu mengatur langkah kedalaman ke nilai 2mm. Sekarang setelah menghasilkan kode-G, kita dapat membukanya di pengirim kode-G dan kita dapat melihat bahwa mesin akan melakukan 4 lintasan yang sama pada perbedaan kedalaman 2mm. Dalam kasus router CNC itu berarti bahwa setiap kali bit akan menjadi 2mm lebih dalam untuk memotong material, tetapi di sini seperti yang ditunjukkan sebelumnya, kami mengatur sumbu Z untuk berputar 45 derajat dengan setiap milimeter atau 90 derajat untuk perjalanan motor stepper Z 2mm .
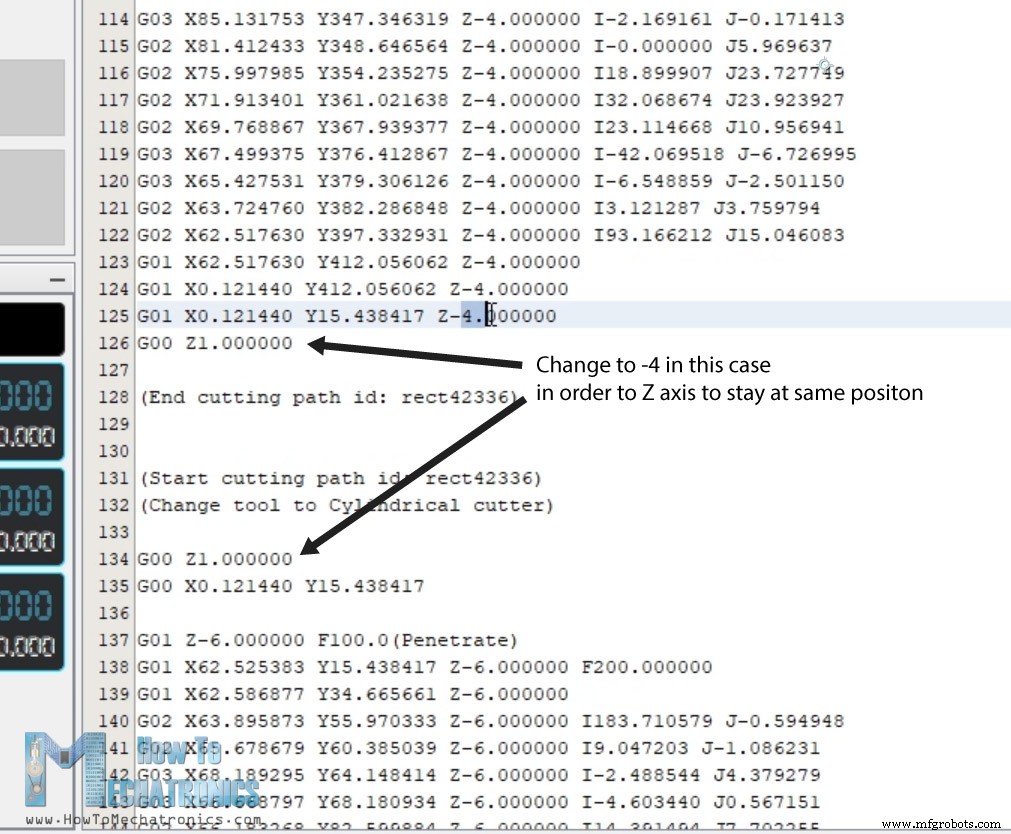
Bagaimanapun, di sini kita juga perlu sedikit memodifikasi G-code. Secara default, kode-G yang dihasilkan setelah setiap passing menggerakkan sumbu Z ke nilai 1mm, yang dalam kasus router CNC berarti menaikkan bit saat diperlukan perjalanan kosong.
Sebenarnya, kita dapat membiarkan kode-G tidak dimodifikasi tetapi itu akan membuat gerakan sumbu Z yang tidak perlu, atau memutar busa tanpa alasan. Oleh karena itu, setelah setiap iterasi kode, kita hanya perlu memodifikasi nilai sumbu Z agar tetap di tempat yang sama, tanpa kembali ke nilai 1mm.
Untuk memasang potongan busa untuk membuat bentuk 3D, kami menggunakan platform ini yang berisi beberapa baut M3 yang ditumpuk ke dalam potongan busa dan menahannya saat sedang dibentuk.

Sebelum menjalankan kode-G, kita perlu membawa kabel panas secara manual di dekat potongan busa. Jarak dari pusat ke kawat panas harus sebanyak yang kita inginkan agar bentuk kita dicentang. Atau jika kita menginginkan dimensi yang tepat seperti pada gambar, kita perlu mengukur jarak dari titik asal ke pusat bentuk dalam gambar.

Kemudian kita perlu mengklik tombol Atur Ulang Nol di pengontrol untuk memberi tahu program bahwa itu harus dimulai dari sini, bukan dari posisi awal. Dan itu saja, sekarang kita tinggal mengklik tombol Play dan mesin CNC Arduino akan membuat bentuk 3D.
Anda dapat mendownload file G-code dan file Inkscape untuk semua contohnya di sini:
Jadi itu cukup banyak untuk tutorial ini. I hope the explanation was clear enough and that you will be able to make your own CNC machine. Jangan ragu untuk mengajukan pertanyaan apa pun di bagian komentar di bawah dan periksa Koleksi Proyek Arduino saya.


