Mengotomatiskan Proses Anda Melalui Pengambilan Bin – Inilah yang Harus Diperhatikan
Mengapa baca ini: Pengambilan bin telah menjadi salah satu proses yang paling menantang dalam otomatisasi selama bertahun-tahun. Meskipun teknologi dapat mengoptimalkan produksi Anda dalam beberapa cara, beberapa tugas mungkin masih terlalu rumit untuk ditangani. Artikel ini menunjukkan proses yang dapat diotomatisasi melalui pemilihan bin, potensi tantangan, dan solusinya.
Apa yang dimaksud dengan pengambilan sampah?
Tujuan dari bin-picking adalah untuk mengambil objek serupa yang ditempatkan dan diorientasikan secara acak dari bin, menggunakan sistem penglihatan, robot, dan gripper. Sistem penglihatan biasanya melakukan pemindaian 3D terhadap objek yang memberikan titik awannya (kumpulan titik dalam ruang yang membentuk suatu objek) dan dengan demikian mengenalinya.
Kemudian robot didorong ke dalam nampan, mengambil objek, keluar dari nampan dan ke target penempatan, biasanya sebuah kotak atau perlengkapan lainnya.
Tantangan dan solusi untuk robotika bagian dari proses pengambilan sampah
Beberapa item akan sulit dijangkau
Salah satu masalah utama dengan pengambilan bin adalah ketidakmampuan robot untuk mengambil semua bagian dari bin. Mengambil 80 hingga 85 persen di antaranya dapat diatur karena sistem penglihatan akan memerintahkan robot untuk mengambil objek yang mudah diambil (misalnya, yang duduk di atas).
Bagian yang sulit adalah mengatur untuk mengambil barang-barang terakhir yang terjalin atau duduk di sudut tempat sampah. Hal ini dapat diselesaikan dengan dua cara. Yang pertama menyiratkan mendesain ulang tempat sampah, memberikan bentuk yang lebih praktis. Misalnya, bentuk kerucut akan membuat semua bagian selalu berada di tengah.
Perbaikan kedua adalah menggoyang wadah (misalnya secara otomatis menggunakan motor) sehingga posisi dan orientasi bagian diatur ulang dan tidak tercampur lagi. Kamera kemudian akan mengidentifikasi mereka dengan lebih mudah.
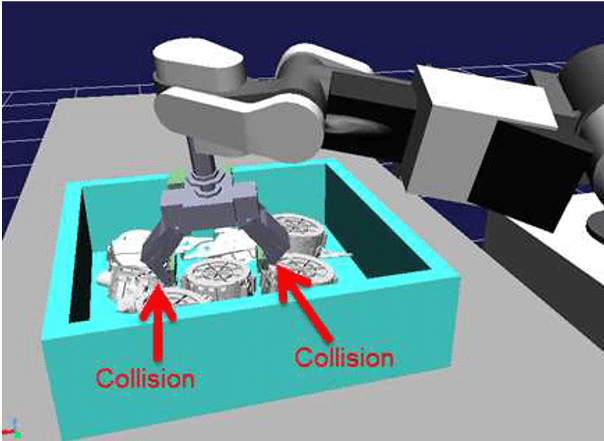
Gripper dapat merusak item yang dikumpulkan
Masalah lain adalah kemungkinan tabrakan gripper dengan benda-benda lain saat mencoba mengambilnya. Strategi pengambilan harus tepat untuk menghindari kerusakan pada bagian yang tersisa (terutama yang rapuh).
Solusi untuk itu adalah algoritma perencanaan jalur yang akurat dengan penghindaran rintangan. Perencanaan jalur dalam robotika adalah proses menemukan jalur kontinu yang optimal dari titik A ke titik B. Jika penghindaran rintangan juga disertakan, tugas yang sama dilakukan tanpa menabrak rintangan apa pun.
Mungkin ada kasus di mana benda-benda di tempat sampah memiliki bentuk atau sifat yang berbeda (misalnya apel dan jeruk). Dalam hal ini, gripper lembut atau gripper vakum dengan cangkir hisap dapat digunakan sehingga dapat beradaptasi dengan berbagai ukuran dan bentuk.

Tantangan dan solusi untuk bagian visi dari proses pengambilan sampah
Sistem penglihatan dari solusi pengambilan tempat sampah dapat mencakup kamera 2D atau 3D. Jelas bahwa kamera 3D (kamera ganda yang menghasilkan gambar 3D) lebih mahal, tetapi lebih efektif. Selain itu, pemindai laser 3D yang menghasilkan awan titik yang disebutkan di atas dapat digunakan.
Petir, oklusi, dan deteksi tepi dapat mempersulit proses
Masalah berulang dalam penglihatan termasuk pencahayaan, oklusi dan deteksi tepi. Mereka berlaku untuk sistem penglihatan 2D dan 3D.
Pencahayaan artinya bayangan dilemparkan dari setiap objek ke objek lainnya sehingga kamera sulit mendeteksinya. Hal ini dapat diatasi dengan memberikan pemandangan dengan pencahayaan tambahan yang dapat dipasang di sebelah kamera atau di pergelangan tangan robot.
Oklusi terjadi saat objek tidak sepenuhnya terlihat oleh kamera karena objek lain diletakkan di atasnya. Sekali lagi, mengocok tempat sampah dapat berguna dalam kasus ini, sehingga objek dapat lebih mudah dideteksi. Lebih mudah dideteksi.
Deteksi tepi adalah tantangan untuk mengetahui garis keliling (tepi) suatu objek. Itu menjadi lebih sulit ketika sejumlah besar objek ditempatkan bersebelahan seperti di tempat sampah. Perbaikan untuk masalah ini bergantung pada perangkat lunak dan metode yang digunakan.
Cara menemukan potensi untuk mengotomatisasi proses Anda melalui pemilihan bin
Jika Anda mempertimbangkan untuk mengotomatisasi proses di perusahaan Anda dengan menggunakan bin picking, poin-poin berikut dapat menyarankan beberapa potensi untuk otomatisasi:
- Jumlah bagian kecil yang tinggi: Jika sistem diatur dengan benar, robot dapat mengambil bagian tersebut (seperti sekrup atau ring) dengan cepat dan kuat.
- Item yang tidak dipesan: Proses di mana tidak mungkin untuk menerima barang secara berurutan dari proses atau subpemasok sebelumnya. Dalam kebanyakan kasus, akan lebih efektif untuk meminta item dikirimkan secara terstruktur, dan dengan demikian menghindari pengambilan sampah sepenuhnya.
- Bagian yang memiliki permukaan matte. Jika bagian sangat reflektif, seperti bagian logam mesin, mungkin ada tantangan dengan petir. Sebagian besar sistem kamera akan kesulitan menemukan item untuk pengambilan sampah.
- Proses di mana waktu siklus lebih dari sekitar 10 detik , dan lebih disukai dengan penyangga untuk bagian yang dipilih. Sistem pengambilan sampah membutuhkan waktu untuk menemukan dan mengambil setiap item.
Kesimpulan
Bagi para pengembang, pemilihan bin benar-benar merupakan cawan suci. Bagi pelanggan mungkin tidak demikian. Biasanya, ada baiknya mencoba menghindari penggunaan solusi pengambilan bin, cukup dengan memastikan bahwa format pengiriman item teratur, bukan acak dalam bin.
Ini biasanya akan menambah sedikit biaya, tetapi seringkali lebih murah dan memungkinkan pemrosesan lebih cepat daripada menggunakan bin picking.
Namun, dalam beberapa kasus ini tidak mungkin, atau sangat mahal. Dalam kasus tersebut, sangat bagus untuk dapat menggunakan bin picking.
Jika proses Anda menandai keempat poin sebelumnya, itu mungkin sangat cocok untuk bin picking. Saat menemukan solusi yang akan digunakan, berhati-hatilah karena beberapa solusi masih sangat eksperimental, sementara yang lain memiliki beberapa tahun untuk matang dan membuktikan kekokohannya.


