Pengantar Akselerometer Kapasitif:Mengukur Akselerasi dengan Penginderaan Kapasitif
Dalam artikel ini, kita akan membahas cara menggunakan penginderaan kapasitif untuk mengukur akselerasi.
Akselerometer digunakan di berbagai area aplikasi. Misalnya, dalam aplikasi otomotif, akselerometer digunakan untuk mengaktifkan sistem airbag. Kamera menggunakan akselerometer untuk stabilisasi gambar secara aktif. Hard drive komputer juga mengandalkan akselerometer untuk mendeteksi guncangan eksternal yang dapat merusak kepala baca/tulis perangkat. Dalam hal ini, akselerometer menghentikan operasi penggerak saat terjadi guncangan eksternal. Ini hanya beberapa aplikasi akselerometer.
Kemungkinannya sebenarnya tidak terbatas untuk apa perangkat ini dapat digunakan. Kemajuan besar dalam teknologi fabrikasi mikro telah memungkinkan akselerometer mesin mikro kecil dan berbiaya rendah saat ini. Faktanya, ukuran kecil dan biaya rendah adalah dua faktor utama yang memungkinkan kami menerapkan perangkat ini ke spektrum aplikasi yang begitu luas.
Pada artikel ini, kita akan melihat fisika pengukuran percepatan. Kita akan melihat bagaimana struktur mass-spring-damper (atau dikenal sebagai mass-damper-spring) dapat mengubah percepatan menjadi besaran perpindahan dan bagaimana pendekatan penginderaan kapasitif dapat diterapkan untuk mengubah perpindahan ini menjadi sinyal listrik yang sebanding dengan percepatan yang diterapkan.
Mengukur Percepatan Menggunakan Mass-spring-damper
Struktur massa-pegas-peredam seperti yang ditunjukkan pada Gambar 1 dapat digunakan untuk mengukur percepatan.
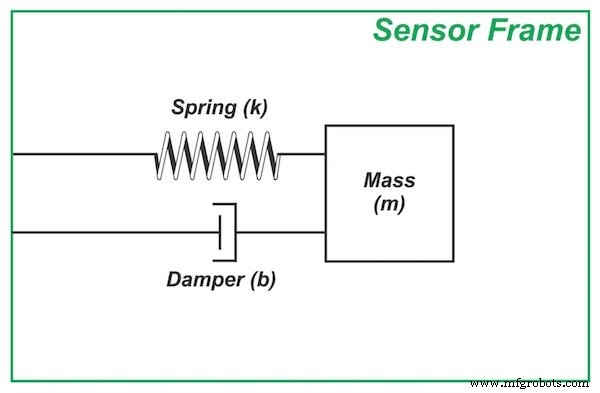
Gambar 1. Struktur peredam pegas-massa
Jumlah massa yang diketahui, biasanya disebut sebagai massa bukti (atau massa uji), dihubungkan ke bingkai sensor melalui pegas.
Meskipun peredam adalah komponen penting dari sistem ini, kami akan mengesampingkannya sampai artikel berikutnya dalam seri ini karena mungkin agak misterius bagi EE dan beberapa paragraf mungkin diperlukan untuk memperkenalkan konsep dasar peredam.
Mari kita lihat bagaimana struktur yang ditunjukkan pada Gambar 1 dapat mendeteksi percepatan.
Ketika bingkai sensor berakselerasi karena gaya eksternal, massa bukti cenderung "menjauh" karena kelembamannya. Ini mengubah posisi relatif massa bukti sehubungan dengan bingkai sensor seperti yang diilustrasikan di bawah ini.
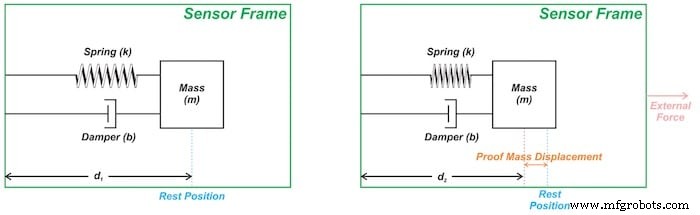
Gambar 2. (a) Massa bukti berada pada posisi diamnya ketika tidak ada gaya eksternal. (b) Ketika bingkai dipercepat ke kanan, pengamat di bingkai sensor mengamati bahwa massa bukti dipindahkan ke sisi kiri dari posisi diamnya.
Gambar 2(a) menunjukkan massa bukti pada posisi diamnya ketika tidak ada gaya eksternal. Ketika gaya eksternal diterapkan pada bingkai, seperti yang ditunjukkan pada Gambar 2 (b), bingkai dipercepat ke kanan. Massa bukti awalnya cenderung diam, yang mengubah posisi relatif massa bukti terhadap rangka (d2 1 ).
Seorang pengamat dalam kerangka non-inersia (yaitu, percepatan) dari sensor mengamati bahwa massa bukti dipindahkan ke sisi kiri dari posisi diamnya. Pegas dikompresi karena perpindahan massa bukti dan memberikan gaya yang sebanding dengan perpindahan pada massa bukti. Gaya yang diberikan oleh pegas mendorong massa bukti ke kanan dan membuatnya berakselerasi ke arah gaya eksternal.
Jika nilai yang sesuai dipilih untuk parameter sistem yang berbeda, perpindahan massa bukti akan sebanding dengan nilai percepatan rangka (setelah respons transien sistem padam).
Untuk meringkas, struktur peredam pegas-massa mengubah percepatan bingkai sensor menjadi perpindahan massa bukti. Pertanyaan selanjutnya adalah, bagaimana kita bisa mengukur perpindahan ini?
Mengukur Perpindahan Massa Bukti:Pendekatan Penginderaan Kapasitif
Perpindahan massa bukti dapat diukur dengan beberapa cara. Salah satu metode umum adalah pendekatan penginderaan kapasitif yang digambarkan pada Gambar 3.
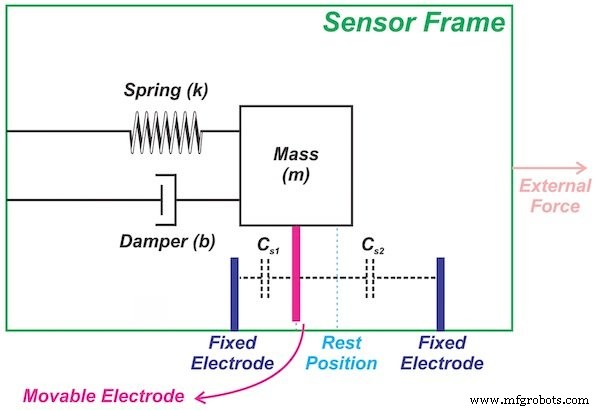
Gambar 3
Ada dua elektroda yang dipasang pada bingkai sensor bersama dengan elektroda bergerak yang terhubung ke massa bukti. Ini menciptakan dua kapasitor, Cs1 dan Cs2 , seperti yang ditunjukkan pada Gambar 3.
Ketika massa bukti bergerak dalam satu arah, kapasitansi antara elektroda bergerak dan salah satu elektroda tetap meningkat sementara kapasitansi kapasitor lainnya berkurang. Inilah sebabnya mengapa kita hanya perlu mengukur perubahan arti kapasitor untuk mendeteksi perpindahan massa bukti, yang sebanding dengan percepatan input.
Pengkondisian Sinyal Akselerometer Menggunakan Demodulasi Sinkron
Untuk mengukur secara akurat perubahan kapasitor arti, kita dapat menerapkan teknik demodulasi sinkron. Gambar 4 menunjukkan versi sederhana dari pengkondisian sinyal yang digunakan dalam keluarga akselerometer ADXL dari Perangkat Analog.
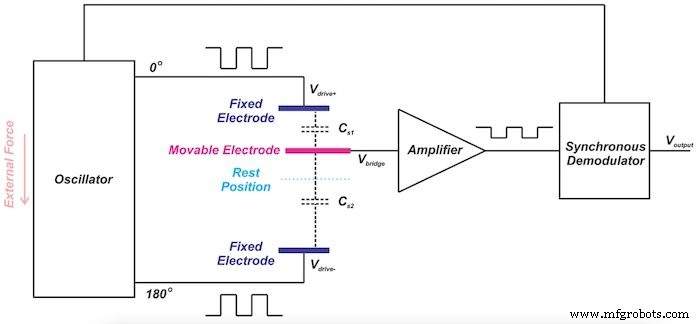
Gambar 4. Gambar (diadaptasi) milik Perangkat Analog
Dalam hal ini, gelombang persegi 1 MHz digunakan sebagai eksitasi AC dari kapasitor indra Cs1 dan Cs2 . Gelombang persegi diterapkan pada elektroda tetap memiliki amplitudo yang sama tetapi 180 ° keluar dari fase terhadap satu sama lain. Ketika elektroda yang dapat bergerak berada pada posisi istirahatnya, tegangan pada input amplifier adalah nol volt.
Ketika elektroda bergerak bergerak lebih dekat ke salah satu elektroda tetap, bagian yang lebih besar dari tegangan eksitasi dari elektroda itu muncul di input penguat Vjembatan , yang berarti gelombang persegi yang muncul pada input penguat sefasa dengan tegangan eksitasi dari elektroda yang lebih dekat.
Misalnya, pada Gambar 4, output yang diperkuat adalah gelombang persegi dalam fase dengan Vdrive+ karena Cs1 lebih besar dari Cs2 .
Amplitudo Vjembatan adalah fungsi dari perpindahan massa bukti; Namun, kita juga perlu mengetahui hubungan fase Vjembatan sehubungan dengan Vdrive+ dan Vdrive- untuk menentukan ke arah mana massa bukti dipindahkan.
Demodulator sinkron pada dasarnya mengalikan output penguat dengan tegangan eksitasi (baik Vdrive+ atau Vdrive- ) untuk mengubah gelombang persegi pada keluaran penguat menjadi tegangan DC yang menunjukkan jumlah perpindahan serta arahnya.
Untuk mempelajari bagaimana demodulasi sinkron mencapai ini, silakan merujuk ke artikel saya tentang teknik demodulasi LVDT:Demodulasi LVDT:Tipe Penyearah vs. Demodulasi Sinkron.
Mengapa Kita Tidak Menggunakan Kapasitor Penginderaan Tunggal?
Penginderaan kapasitif, digambarkan pada Gambar 3, memiliki sifat diferensial:ketika Cs1 meningkat, Cs2 menurun, dan sebaliknya.
Dimungkinkan juga untuk menggunakan penginderaan kapasitif ujung tunggal di mana salah satu elektroda tetap dihilangkan, dengan demikian, hanya ada satu kapasitor variabel. Dalam hal ini, kita dapat memodelkan sistem seperti yang ditunjukkan pada Gambar 5.
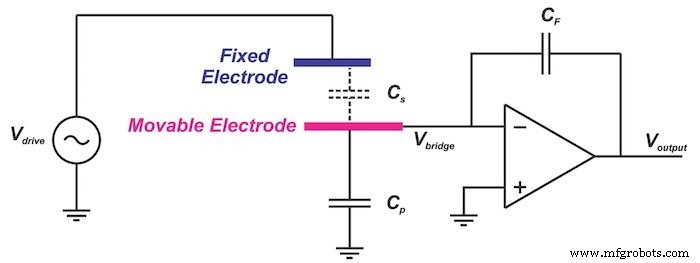
Gambar 5
Versi single-ended ini tampaknya menjadi solusi yang lebih sederhana. Jadi, mengapa kita tidak menggunakan kapasitor penginderaan tunggal?
Struktur Kapasitor Penginderaan Tunggal:Output Nonlinier
Mari kita periksa sirkuit ini lebih dekat.
Pada gambar di atas, Cp memodelkan kapasitansi parasit total dari elektroda bergerak ke tanah. Idealnya, Vjembatan ada di dunia maya dan kita dapat mengabaikan Cp karena memiliki tanah di satu sisi dan tanah virtual di sisi lain.
Oleh karena itu, output dapat diperoleh secara sederhana sebagai:
\[ V_{output} =-\frac{C_s}{C_F} V_{drive}\]
Persamaan 1
Perhatikan bahwa jalur arus bias tidak ditunjukkan pada Gambar 5. Dengan menggunakan persamaan dasar kapasitor, kita dapat menyatakan output dalam bentuk perpindahan massa bukti.
Untuk kapasitor C, kita memiliki:
\[ C =\epsilon \frac{A}{d}\]
Persamaan 2
di mana adalah permitivitas dielektrik, A adalah luas pelat sejajar, dan d adalah jarak antara dua pelat konduktif. Untuk mempermudah, asumsikan bahwa kedua kapasitor Cs dan CF memiliki dan A yang sama.
Persamaan 1 kemudian dapat disederhanakan menjadi:
\[ V_{output} =-\frac{d_F}{d_s} V_{drive}\]
di mana dF dan ds menunjukkan jarak antara elektroda CF dan Cs , masing-masing. ds dapat dinyatakan sebagai jumlah dari jarak awal d0 dan nilai perpindahan d.
Dari sana kita dapat memperoleh:
\[ V_{output} =-\frac{d_F}{d_0 + \Delta d} V_{drive}\]
Seperti yang Anda lihat, suku perpindahan (Δd) ada dalam penyebut persamaan keluaran. Oleh karena itu, outputnya adalah fungsi nonlinier dari perpindahan massa bukti d.
Struktur Diferensial:Output Linier
Mari kita periksa fungsi transfer dari penginderaan kapasitif diferensial yang digambarkan pada Gambar 4.
Anda dapat memverifikasi bahwa, dengan penginderaan kapasitif diferensial, Vjembatan diberikan oleh:
\[ V_{jembatan} =\frac{C_{s1} V_{drive+} + C_{s2} V_{drive-}}{C_{s1} + C_{s2 }} \]
Menerapkan Persamaan 2 dan mengasumsikan bahwa kedua kapasitor Cs1 dan Cs2 memiliki nilai dan A yang sama, diperoleh:
\[ V_{jembatan} =\frac{d_{s2} V_{drive+} + s_{s1} V_{drive-}}{d_{s1} + d_{s2 }} \]
Persamaan 3
di mana ds1 dan ds2 menunjukkan jarak antara elektroda Cs1 dan Cs2 , masing-masing. Ketika ds1 meningkat, ds2 berkurang dengan jumlah yang sama dan sebaliknya.
Dengan asumsi bahwa:
\[ d_{s1} =d_0 - \Delta d \]
\[ d_{s2} =d_0 + \Delta d \]
\[ V_{drive+} =- V_{drive-} \]
Persamaan 3 disederhanakan menjadi:
\[ V_{bridge} =\frac{\Delta d}{d_0} V_{drive+} \]
Seperti yang Anda lihat, dengan struktur diferensial, tegangan keluaran adalah fungsi linier dari perpindahan massa bukti d. Perhatikan bahwa, meskipun kita dapat menggunakan perangkat lunak untuk menghilangkan kesalahan linearitas sensor, memiliki respons linier diinginkan karena meningkatkan presisi pengukuran dan memfasilitasi kalibrasi sistem.
Kesimpulan
Kami melihat bagaimana struktur peredam pegas massa dapat mengubah percepatan menjadi besaran perpindahan dan bagaimana pendekatan penginderaan kapasitif dapat diterapkan untuk mengubah perpindahan ini menjadi sinyal listrik yang sebanding dengan percepatan yang diterapkan.
Kami juga secara singkat menyebutkan bahwa, agar perpindahan massa bukti sebanding dengan percepatan yang diterapkan, parameter yang berbeda dari sistem peredam pegas massa harus dipilih dengan tepat.
Pada artikel berikutnya, kita akan mendapatkan fungsi transfer dari sistem peredam pegas-massa untuk mendapatkan wawasan yang lebih dalam tentang operasi sistem.
Untuk melihat daftar lengkap artikel saya, silakan kunjungi halaman ini.


