Desain Magnetik Efek Hall:Konfigurasi Head-on dan Slide-by
Pelajari tentang bagaimana efek Hall digunakan dalam aplikasi penginderaan posisi.
Penginderaan posisi adalah salah satu aplikasi terpenting dari sensor efek Hall. Perangkat efek Hall merasakan kekuatan medan magnet yang diterapkan. Untuk mendeteksi posisi suatu benda, kita dapat menempelkan magnet permanen kecil pada benda tersebut. Saat objek menggerakkan magnet dalam kaitannya dengan perangkat Hall, kekuatan medan magnet berubah. Perubahan tersebut dapat diproses oleh sistem untuk mendeteksi posisi objek.
Ada beberapa konfigurasi sensor-magnet yang berbeda yang dapat digunakan dalam aplikasi penginderaan posisi berbasis efek Hall. Dengan setiap konfigurasi sensor-magnet, magnet digerakkan dalam kaitannya dengan sensor dengan cara yang berbeda. Ini mempengaruhi medan magnet yang dirasakan oleh perangkat Hall dan mengubah karakteristik sistem.
Dalam artikel ini, kita akan melihat beberapa konfigurasi magnetik dasar yang digunakan dalam penginderaan posisi berbasis efek Hall dan membahas kelebihan dan kekurangannya.
Konfigurasi Langsung
Konfigurasi magnetik paling sederhana adalah penginderaan langsung yang ditunjukkan pada Gambar 1.
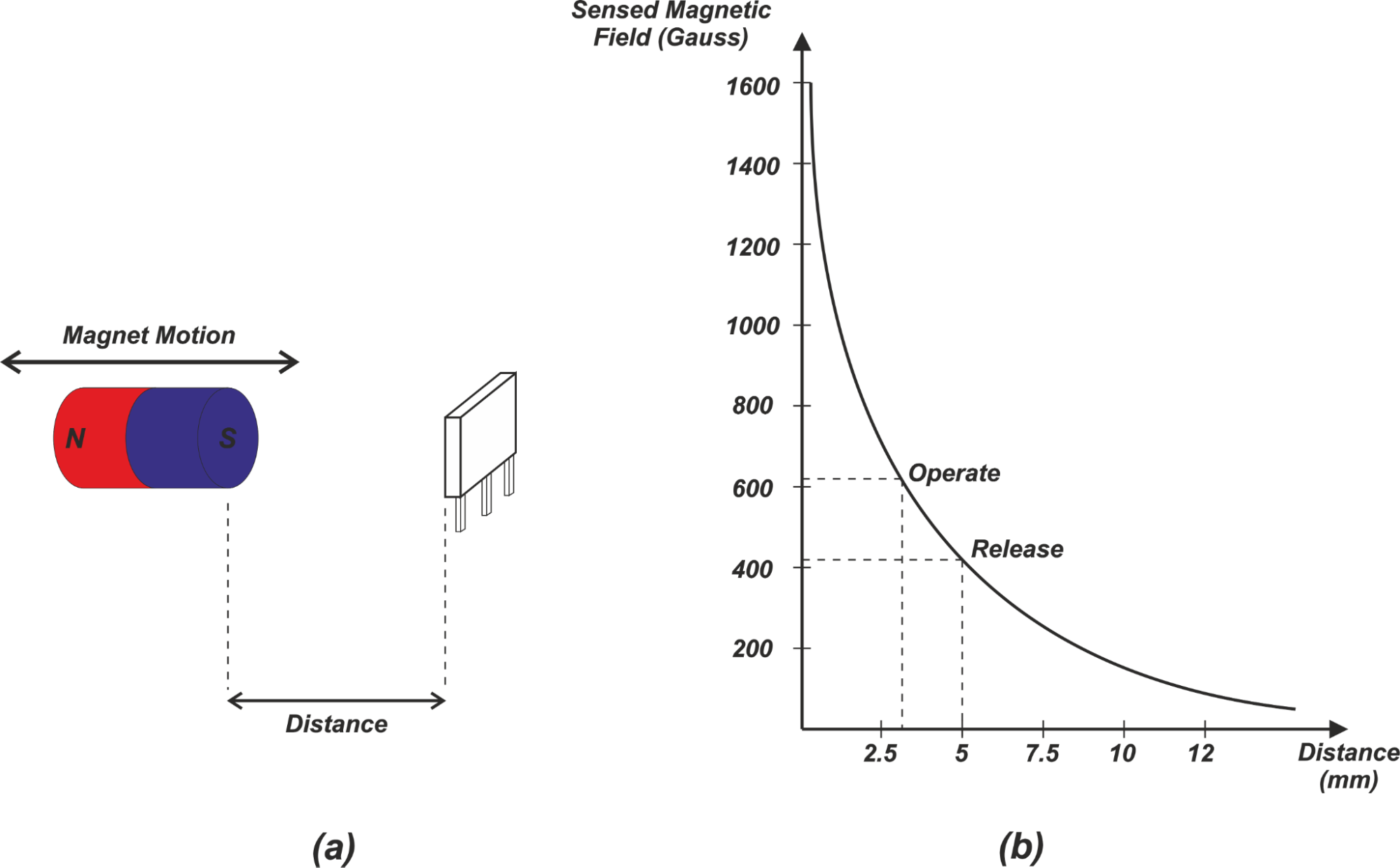
Gambar 1.
Dalam hal ini, kutub selatan magnet digerakkan langsung menuju atau menjauhi sensor. Ketika magnet sangat dekat dengan sensor, sejumlah besar garis fluks magnet melewati permukaan sensor. Namun, saat kutub selatan magnet menjauh dari sensor, intensitas medan magnet menurun dengan cepat seperti yang ditunjukkan pada Gambar 1(b).
Perhatikan bahwa kurva Gauss versus jarak kadang-kadang disebut sebagai peta fluks struktur. Kerapatan fluks magnet konfigurasi head-on berbanding terbalik dengan kuadrat jarak antara magnet dan sensor. Nilai fluks yang diberikan pada Gambar 1(b) dapat dihasilkan oleh magnet yang panjangnya kira-kira 30 mm dan diameternya sekitar 6 mm.
Aplikasi:Mendeteksi Keberadaan Objek
Konfigurasi langsung dapat digunakan dengan sensor efek Hall digital (ON/OFF) untuk mendeteksi keberadaan suatu objek. Asumsikan bahwa titik operasi dan pelepasan magnet dari sensor seperti yang ditunjukkan pada Gambar 1(b). Titik operasi Magnetik menentukan tingkat penguatan medan magnet di mana perangkat Hall menyala. Titik pelepasan magnet sesuai dengan medan magnet yang melemah di mana perangkat Hall dimatikan.
Saat magnet mendekati sensor, intensitas medan magnet menjadi semakin besar. Pada jarak sekitar 3,1 mm, medan magnet yang dirasakan sama dengan titik operasi magnet (sekitar 620 Gauss dalam contoh kita) yang mengaktifkan sensor. Membawa magnet lebih dekat ke sensor mengarah ke medan magnet yang lebih besar dan membuat sensor ON. Saat sensor menjauh dari magnet, medan magnet berkurang.
Namun, selama medan magnet tidak lebih kecil dari titik pelepasan (sekitar 420 Gauss dalam contoh kita), sensor tetap ON. Hanya ketika medan magnet turun di bawah titik pelepasan perangkat mati. Dengan cara ini, kita dapat mendeteksi keberadaan suatu objek.
Batasan Penginderaan Langsung
Konfigurasi ini kurang tepat terutama dari segi jarak yang membuat sensor mati. Hal ini disebabkan oleh fakta bahwa kemiringan peta fluks (kurva Gauss versus jarak) lebih kecil di sekitar titik pelepasan. Variasi tertentu dalam nilai titik pelepasan magnetik dapat menyebabkan variasi yang relatif besar dalam nilai jarak di mana sensor dimatikan. Variasi yang sama pada titik operasi magnetik menyebabkan variasi jarak yang lebih kecil. Ini diilustrasikan pada Gambar 2.
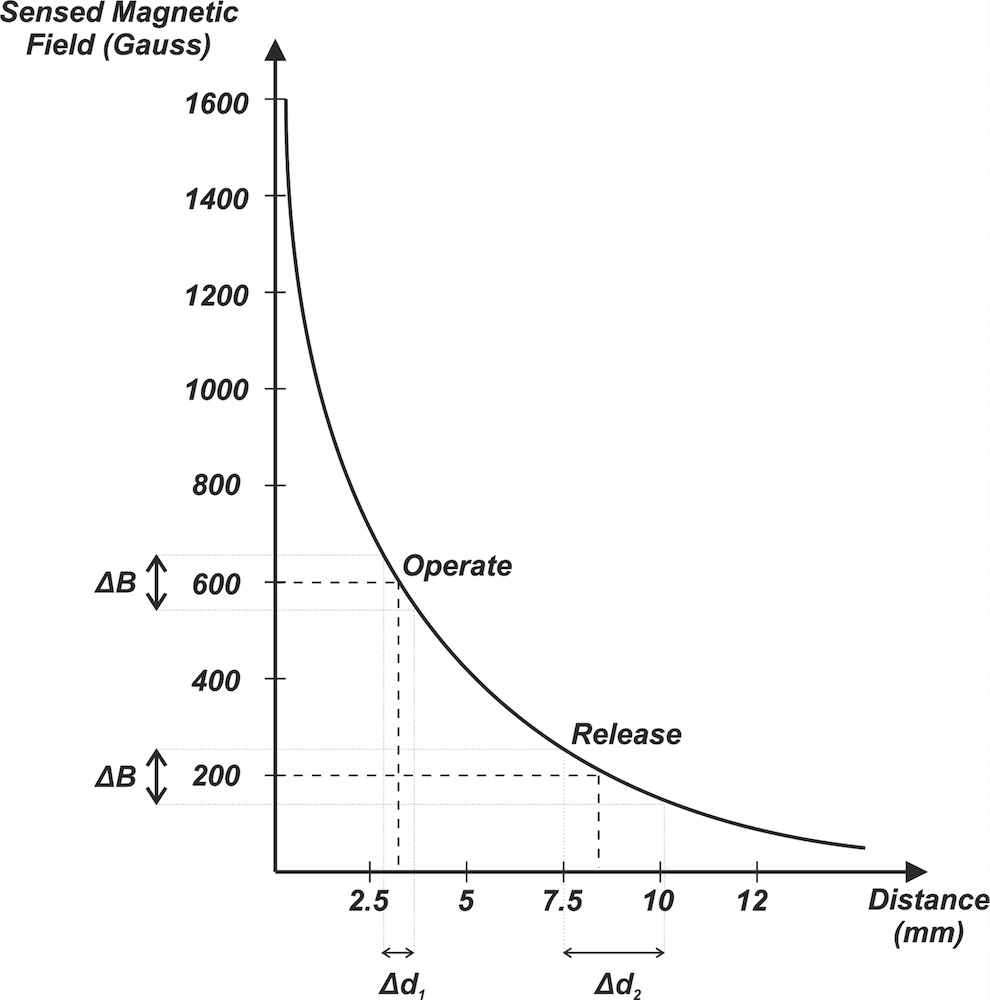
Gambar 2
Asumsikan bahwa variasi unit-ke-unit dari titik operasi dan pelepasan adalah B untuk sensor hipotetis seperti yang ditunjukkan pada Gambar 2. Karena kurva memiliki kemiringan yang lebih besar pada titik operasi magnetik, Δd1 jauh lebih kecil dari d2 . Oleh karena itu, jarak yang sesuai dengan titik operasi magnetik akan lebih konsisten antara papan yang berbeda.
Kerugian lain adalah bahwa penginderaan langsung tidak dapat digunakan untuk mendeteksi rentang perpindahan yang besar karena garis medan magnet meluruh dengan sangat cepat. Selain itu, dengan konfigurasi head-on, hubungan antara medan penginderaan dan jarak tidak linier. Hal ini membuat deteksi gerakan pukulan panjang menjadi sulit ketika pengukuran posisi linier diperlukan. Karena keterbatasan ini, penginderaan langsung biasanya digunakan sebagai pendeteksi jarak dalam aplikasi yang persyaratan akurasinya tidak terlalu menuntut.
Unipolar Slide-By Sensing
Dalam pengaturan ini, satu kutub magnet bergerak menyamping melewati permukaan sensor. Ini ditunjukkan pada Gambar 3(a).
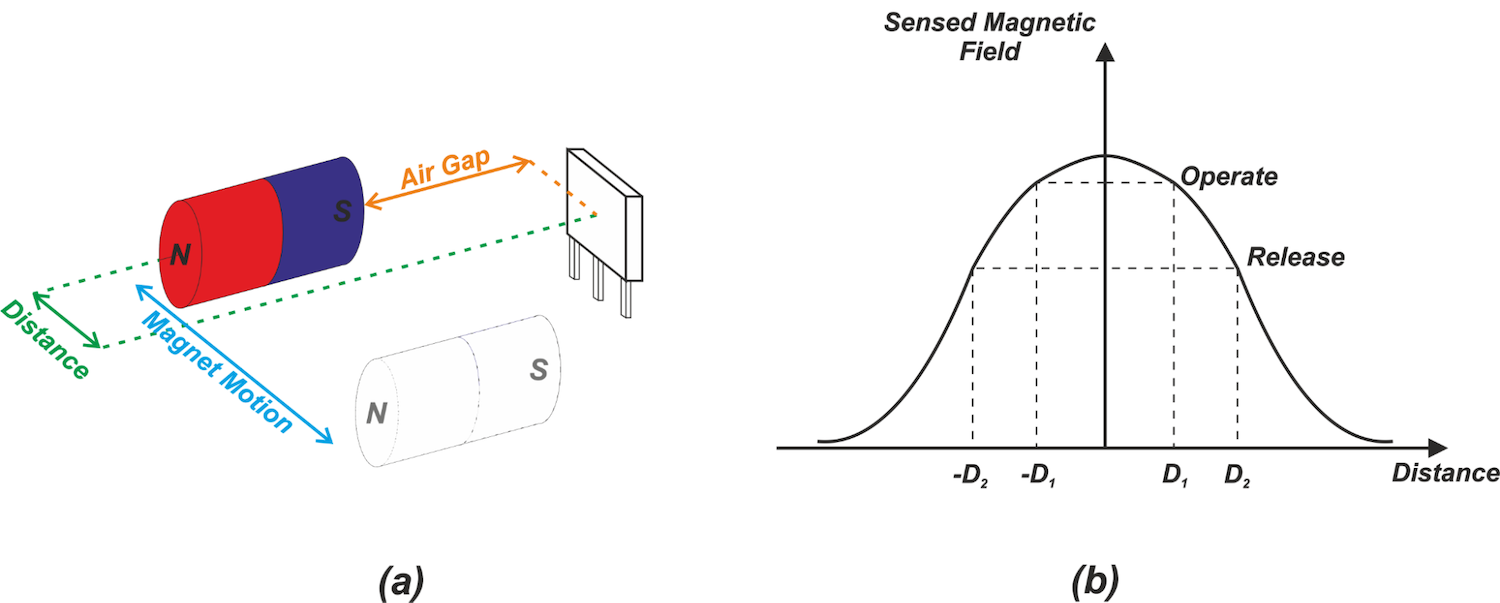
Gambar 3
Kutub magnet berada pada jarak tegak lurus yang konstan (ditunjukkan oleh "celah udara" pada gambar) saat bergerak melewati sensor. Pada posisi tengah (jarak=0), medan magnet yang dirasakan berada pada titik maksimumnya. Saat magnet menjauh dari sensor, medan magnet berkurang. Karena medan magnet yang dihasilkan magnet adalah simetris, peta fluks simetris di sekitar titik asal seperti yang ditunjukkan pada Gambar 3(b).
Nilai puncak dari peta fluks berubah dengan nilai "celah udara" seperti yang ditunjukkan pada Gambar 4.
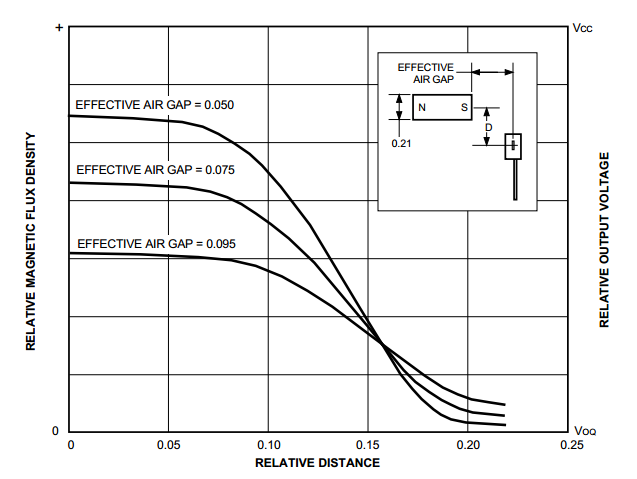
Gambar 4. Gambar milik Allegro.
Konfigurasi Head-On atau Slide-By?
Penting untuk dicatat bahwa pilihan konfigurasi magnetik bergantung pada jenis gerakan yang dideteksi. Setiap sistem mungkin memiliki batasan dan fitur mekanis yang berbeda. Misalnya, dengan konfigurasi head-on, objek tidak dapat bergerak melewati sensor. Pengaturan ini sesuai dengan aplikasi di mana objek yang dideteksi memiliki posisi akhir yang pasti dan kami tertarik untuk mendeteksi ada/tidaknya objek pada titik akhir ini.
Misalnya, penginderaan langsung mungkin merupakan pilihan yang baik untuk mendeteksi apakah penutup penutup ponsel cerdas terbuka atau tertutup. Penginderaan slide-by tidak memiliki batasan ini; itu dapat digunakan tidak peduli apakah objek bergerak melewati sensor atau tidak.
Salah satu fitur menarik tentang konfigurasi slide-by adalah simetrinya. Karena kurva Gauss versus jarak dari struktur ini simetris di sekitar titik asal, titik operasi dan pelepasan tidak bergantung pada apakah kita bergerak menuju atau menjauhi sensor. Ini berguna saat mendeteksi penyimpangan dari garis tengah.
Perhatikan bahwa ada konfigurasi slide-by lain yang beberapa di antaranya tidak memberikan respons simetris. Di artikel berikutnya, kita akan melihat konfigurasi magnetik yang lebih canggih yang biasanya digunakan dalam aplikasi penginderaan posisi efek Hall.
Untuk melihat daftar lengkap artikel saya, silakan kunjungi halaman ini.


