Kait S-R
Multivibrator bistable memiliki dua keadaan stabil, seperti yang ditunjukkan oleh awalan bi dalam namanya. Biasanya, satu negara bagian disebut sebagai set dan yang lainnya sebagai reset . Oleh karena itu, perangkat bistable yang paling sederhana dikenal sebagai set-reset , atau S-R, kait. Untuk membuat gerendel S-R, kita dapat menghubungkan dua gerbang NOR sedemikian rupa sehingga keluaran yang satu diumpankan kembali ke masukan yang lain, dan sebaliknya, seperti ini:
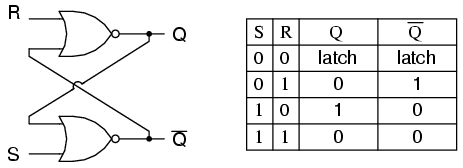
Keluaran Q dan bukan-Q seharusnya dalam keadaan yang berlawanan. Saya katakan “seharusnya” karena membuat input S dan R sama dengan 1 menghasilkan Q dan bukan-Q menjadi 0. Karena alasan ini, memiliki S dan R sama dengan 1 disebut tidak valid atau ilegal status untuk multivibrator S-R.
Jika tidak, buat S=1 dan R=0 “mengatur” multivibrator sehingga Q=1 dan bukan-Q=0. Sebaliknya, membuat R=1 dan S=0 “mengatur ulang” multivibrator dalam keadaan yang berlawanan. Ketika S dan R keduanya sama dengan 0, output multivibrator "mengunci" di status sebelumnya.
Perhatikan bagaimana fungsi multivibrator yang sama dapat diimplementasikan dalam logika tangga, dengan hasil yang sama:
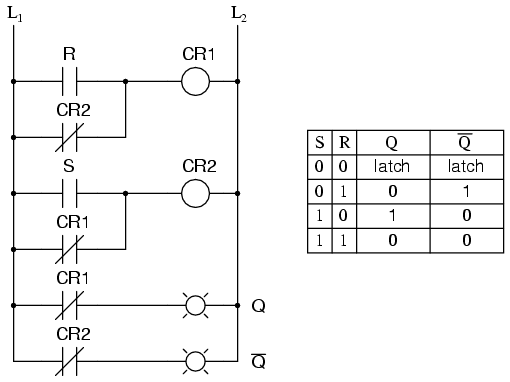
Menurut definisi, kondisi Q=1 dan bukan-Q=0 adalah set . Kondisi Q=0 dan bukan-Q=1 adalah reset . Istilah-istilah ini bersifat universal dalam menggambarkan status keluaran dari setiap rangkaian multivibrator. Pengamat yang lihai akan mencatat bahwa kondisi penyalaan awal baik gerbang atau tangga berbagai gerendel S-R sedemikian rupa sehingga kedua gerbang (kumparan) mulai dalam mode de-energi.
Dengan demikian, orang akan berharap bahwa rangkaian akan memulai dalam kondisi yang tidak valid, dengan output Q dan bukan-Q berada dalam kondisi yang sama. Sebenarnya, ini benar! Namun, kondisi invalid tidak stabil dengan input S dan R tidak aktif, dan rangkaian akan cepat stabil baik dalam kondisi set atau reset karena satu gerbang (atau relai) terikat untuk bereaksi sedikit lebih cepat daripada yang lain.
Jika kedua gerbang (atau gulungan) sama persis , mereka akan berosilasi antara tinggi dan rendah seperti multivibrator astabil saat dinyalakan tanpa pernah mencapai titik stabilitas! Untungnya untuk kasus seperti ini, kecocokan komponen yang tepat adalah kemungkinan yang jarang terjadi.
Harus dicatat bahwa meskipun kondisi astabil (osilasi terus-menerus) akan sangat jarang, kemungkinan besar akan ada satu atau dua siklus osilasi di sirkuit di atas, dan keadaan akhir sirkuit (diset atau reset) setelah power-up tidak dapat diprediksi.
Akar masalahnya adalah kondisi balapan antara dua relai CR1 dan CR2 .
Kondisi balapan terjadi ketika dua peristiwa yang saling eksklusif dimulai secara bersamaan melalui elemen sirkuit yang berbeda oleh satu penyebab. Dalam hal ini, elemen rangkaiannya adalah relai CR1 dan CR2 , dan status de-energinya saling eksklusif karena kontak interlocking yang biasanya tertutup.
Jika satu koil relai tidak diberi energi, kontak yang biasanya tertutup akan menjaga koil lainnya tetap berenergi, dengan demikian mempertahankan sirkuit di salah satu dari dua keadaan (set atau reset). Saling mengunci mencegah keduanya relai dari penguncian.
Namun, jika keduanya kumparan relai mulai dalam keadaan tidak diberi energi (seperti setelah seluruh rangkaian dihilangkan energinya dan kemudian dihidupkan) kedua relai akan "berlomba" untuk menjadi terkunci saat menerima daya ("penyebab tunggal") melalui kontak normal-tertutup dari relai lain. Salah satu relai tersebut pasti akan mencapai kondisi tersebut sebelum relai lainnya, sehingga membuka kontak interlocking yang biasanya tertutup dan menghilangkan energi koil relai lainnya.
Relai mana yang "memenangkan" perlombaan ini bergantung pada karakteristik fisik relai dan bukan desain sirkuit, sehingga perancang tidak dapat memastikan keadaan sirkuit yang akan terjadi setelah power-up. Kondisi balapan harus dihindari dalam desain sirkuit terutama untuk ketidakpastian yang akan dibuat. Salah satu cara untuk menghindari kondisi seperti itu adalah dengan memasukkan relai tunda waktu ke dalam sirkuit untuk menonaktifkan salah satu relai yang bersaing untuk waktu yang singkat, memberikan keuntungan yang jelas kepada yang lain.
Dengan kata lain, dengan sengaja memperlambat de-energi dari satu estafet, kami memastikan bahwa estafet lainnya akan selalu "menang" dan hasil balapan akan selalu dapat diprediksi.
Berikut adalah contoh bagaimana relay waktu tunda dapat diterapkan pada sirkuit di atas untuk menghindari kondisi balapan:
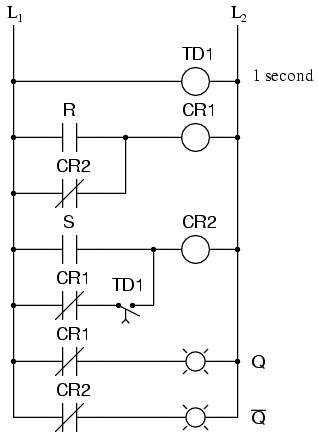
Saat sirkuit menyala, relai tunda waktu menghubungi TD1 di anak tangga kelima ke bawah akan menunda penutupan selama 1 detik. Membuka kontak tersebut selama 1 detik akan mencegah relai CR2 dari memberi energi melalui kontak CR1 dalam keadaan normal-tertutup setelah dinyalakan.
Oleh karena itu, relai CR1 akan diizinkan untuk memberi energi terlebih dahulu (dengan start awal 1 detik), sehingga membuka CR yang biasanya tertutup1 kontak di anak tangga kelima, mencegah CR2 dari diberi energi tanpa input S aktif.
Hasil akhirnya adalah bahwa rangkaian menyala dengan bersih dan dapat diprediksi dalam keadaan reset dengan S=0 dan R=0. Harus disebutkan bahwa kondisi balapan tidak terbatas pada sirkuit estafet. Sirkuit gerbang logika solid-state juga dapat mengalami efek buruk dari kondisi balapan jika dirancang dengan tidak benar.
Program komputer yang rumit, dalam hal ini, juga dapat menimbulkan masalah balapan jika dirancang dengan tidak benar. Masalah balapan adalah kemungkinan untuk sistem sekuensial apa pun, dan mungkin tidak ditemukan sampai beberapa saat setelah pengujian awal sistem. Mereka bisa menjadi masalah yang sangat sulit untuk dideteksi dan dihilangkan.
Aplikasi praktis dari rangkaian kait SR mungkin untuk menghidupkan dan menghentikan motor, menggunakan kontak sakelar tombol tekan sesaat yang biasanya terbuka untuk keduanya start (S) dan berhenti (R) beralih, kemudian memberi energi pada kontaktor motor dengan salah satu CR1 atau CR2 kontak (atau menggunakan kontaktor sebagai pengganti CR1 atau CR2 ).
Biasanya, rangkaian logika tangga yang lebih sederhana digunakan, seperti ini:
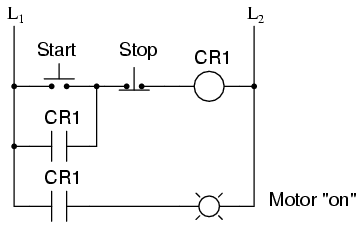
Pada rangkaian start/stop motor di atas, CR1 kontak secara paralel dengan mulai kontak sakelar disebut sebagai kontak “seal-in”, karena kontak tersebut “menyegel” atau mengunci relai kontrol CR1 dalam keadaan berenergi setelah start sakelar telah dilepaskan.
Untuk memecahkan “segel”, atau untuk “membuka” atau “mengatur ulang” sirkuit, tombol berhenti tombol ditekan, yang menghilangkan energi CR1 dan mengembalikan kontak segel ke status biasanya terbuka. Namun, perhatikan bahwa sirkuit ini menjalankan fungsi yang hampir sama dengan gerendel S-R.
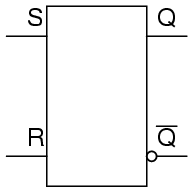
Juga, perhatikan bahwa sirkuit ini tidak memiliki masalah ketidakstabilan yang melekat (jika bahkan kemungkinan kecil) seperti halnya desain kait S-R relai ganda. Dalam bentuk semikonduktor, gerendel S-R tersedia dalam unit yang sudah dikemas sebelumnya sehingga Anda tidak perlu membuatnya dari masing-masing gerbang. Mereka dilambangkan seperti ini:
TINJAUAN:
- Sebuah bistable multivibrator adalah satu dengan dua status keluaran stabil.
- Dalam multivibrator bistabil, kondisi Q=1 dan bukan-Q=0 didefinisikan sebagai set . Kondisi Q=0 dan bukan-Q=1 sebaliknya didefinisikan sebagai reset . Jika Q dan bukan-Q kebetulan dipaksa ke keadaan yang sama (keduanya 0 atau keduanya 1), keadaan itu disebut sebagai tidak valid .
- Dalam kait S-R, aktivasi input S mengatur sirkuit, sementara aktivasi input R mengatur ulang sirkuit. Jika input S dan R diaktifkan secara bersamaan, sirkuit akan berada dalam kondisi tidak valid.
- Sebuah kondisi balapan adalah keadaan dalam sistem sekuensial di mana dua peristiwa yang saling eksklusif secara bersamaan diprakarsai oleh satu penyebab.


