Semua yang perlu Anda ketahui tentang mobil otonom
Belum lama berselang, kami merasa sangat futuristik karena kami tidak harus mengemudi secara fisik agar mobil kami membawa kami dari titik A ke titik B tanpa harus mengambil kendali, tetapi hari itu lebih dekat dari yang kami kira.
Di blog hari ini kami memberi tahu Anda apa itu mobil otonom, teknologi apa yang membuat mobil otonom, klasifikasi apa yang mereka miliki menurut tingkat otonominya, dan model terkini yang menggabungkan teknologi ini. Ayo mulai? Atau lebih tepatnya “Mulai KITT”.
Apa itu mobil otonom?
Mobil otonom adalah mobil yang, dengan serangkaian sensor dan logika komputer, mampu menafsirkan dunia di sekitarnya dan melewatinya seperti yang dilakukan manusia tanpa campur tangan Anda atau dengan bantuan parsial Anda.
Sensor ini memungkinkan memperoleh informasi tentang lokasi kendaraan lain, posisi mereka, jarak dan jalur di mana mereka bepergian. Ini, bersama dengan informasi GPS dan peta yang cukup akurat, menunjukkan kepada mobil situasinya dan elemen di sekitarnya setiap saat. Dalam beberapa kasus, ini juga memungkinkan adaptasi terhadap kondisi cuaca.
Teknologi yang memungkinkan mobil menjadi otonom
Teknologi yang berbeda sedang digunakan untuk pengembangan mobil otonom. Kami menjelaskan yang paling sering digunakan:
Misalnya, navigasi melalui kamera yang terletak di sekitar kendaraan yang digunakan oleh Tesla . Sistem mengemudi otonom ini didasarkan pada kombinasi 8 kamera, 12 sensor ultrasound pendukung, dan radar depan. Secara keseluruhan, mobil mampu "melihat" lingkungan dan menafsirkannya seperti orang, tetapi dengan refleksi yang superior.
Sistem lain yang digunakan oleh perusahaan seperti Google, Ford, Toyota / Lexus, Nissan atau Volkswagen adalah LIDAR. LIDAR adalah pemancar sinar laser yang berputar , yang biasanya terletak di atap kendaraan dan bertanggung jawab untuk merekonstruksi lingkungan 360 derajat di sekitar kendaraan. Melalui pancaran sinar ini dan pantulannya, ia mampu membuat peta digital dari rintangan dalam jangkauannya, dan bersama-sama dengan sensor pendukung seperti casing sebelumnya (ultrasound, radar) ia menekan dan bertindak secara berurutan.
Selain sistem utama yang telah disebutkan (kamera, LIDAR), teknologi bantu juga digunakan yang digunakan untuk meningkatkan informasi yang ditangkap, jenis sinyal lain yang memberikan penilaian lengkap terhadap lingkungan.
Teknologi ini adalah sensor ultrasonik digunakan untuk jarak pendek, tetapi karena biayanya yang rendah, sensor ini memungkinkan untuk memiliki sensor perimeter tidak hanya untuk navigasi kendaraan, tetapi juga untuk keamanan di tempat parkir.
Sistem lain yang tersebar luas adalah radar , yang, tidak seperti LIDAR, memancarkan gelombang radio yang memantul dari objek dan cenderung bekerja lebih baik dalam kondisi cuaca buruk.
Klasifikasi mobil otonom berdasarkan tingkat otonominya
Mobil otonom diklasifikasikan menurut tingkat otonominya, yaitu tingkat kemandirian yang dimiliki mobil terhadap pengemudi.
Klasifikasi pertama dalam pengertian ini didirikan oleh NHTSA pada tahun 2013, badan keselamatan transportasi AS, melalui skala 0 hingga 4.
Ketika sistem telah berkembang, klasifikasi baru dan cara mengevaluasinya muncul, sampai metode saat ini yang digunakan dalam hampir semua kasus, dan yang paling luas, telah tercapai. Kita berbicara tentang standar SAE J3016, revisi terakhir yang terjadi pada tahun 2016.
Klasifikasi ini mencoba mengelompokkan semua merek yang muncul di berbagai negara, memberikan panduan evaluasi yang direkomendasikan, tetapi masing-masing merek dapat menggunakan atau tidak sesuai dengan minatnya.
Panduan ini menetapkan 6 tingkat mengemudi otonom , mulai dari 0 hingga 5. Level ini hanya menetapkan kapasitas minimum yang harus dimiliki kendaraan untuk mencapai setiap level, dan fungsi yang harus diotomatisasi.
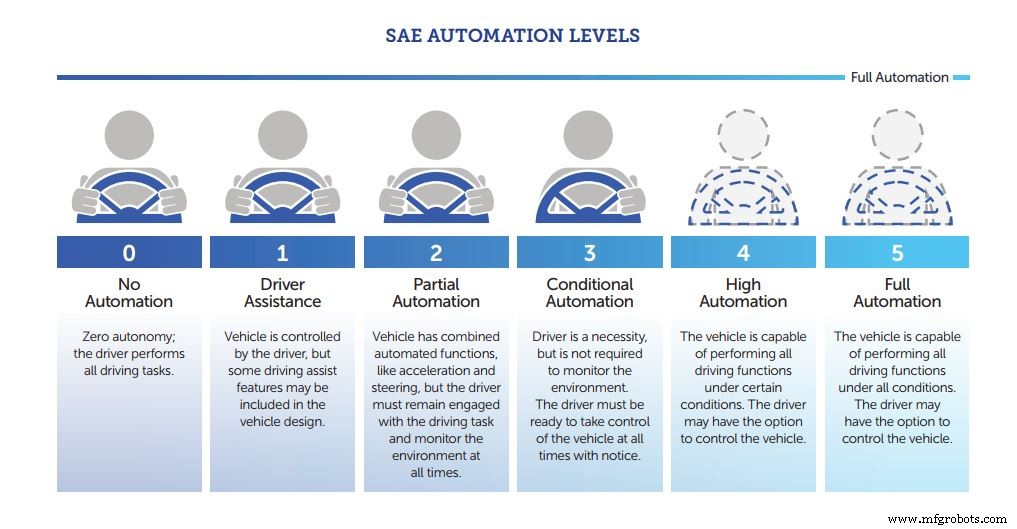
- Tingkat 0. Tanpa otomatisasi apa pun.
- Pengemudi bertanggung jawab 100% atas semua elemen dan ketentuan mengemudi.
- Level 1. Bantuan mengemudi dasar.
- Kendaraan memiliki elemen dasar yang membantu atau membebaskan pengemudi dari tugas-tugas sederhana.
- Ini bisa berupa otomatisasi kecepatan atau pemeliharaan lintasan, tetapi hanya salah satunya.
- Semua tugas lainnya tetap menjadi tanggung jawab pengemudi.
- Tidak ada sistem deteksi otomatis untuk rintangan, objek, atau kejadian saat mengemudi.
- Bantuan hanya dapat digunakan dalam kondisi ideal.
- Tingkat 2. Otomatisasi sebagian.
- Pemeliharaan kecepatan dan lintasan dilakukan secara otomatis.
- Pengemudi dibebaskan dari fungsi yang terkait dengan pergerakan kendaraan.
- Tidak ada sistem deteksi otomatis untuk rintangan, objek, atau kejadian saat mengemudi.
- Bantuan hanya dapat digunakan dalam kondisi ideal.
- Level 3. Otomatisasi mengemudi bersyarat.
- Seperti pada kasus sebelumnya, kecepatan dikontrol baik dengan jalur tuas otonom.
- Sudah ada sistem untuk mendeteksi objek dan situasi mengemudi, serta rintangan.
- Sistem dapat beroperasi tanpa interaksi pengemudi kecuali jika sistem memerlukannya atau ada situasi yang berpotensi berbahaya yang memerlukan intervensi mereka. Pemberitahuan ini harus diberikan jauh sebelumnya sehingga pengemudi punya waktu untuk bereaksi.
- Hanya diperbolehkan untuk digunakan dalam kondisi tertentu.
- Level 4. Otomatisasi mengemudi sepenuhnya.
- Seperti pada kasus sebelumnya, kecepatan dikontrol baik dengan jalur tuas otonom.
- Ada cukup sensor untuk memberikan respons kompleks terhadap situasi dan rintangan, bereaksi sepenuhnya terhadapnya.
- Kendaraan memiliki sistem alternatif jika sistem utama gagal atau tidak dapat mengambil kendali. Sistem alternatif ini tidak memungkinkan semua fungsi mengemudi, tetapi cukup memungkinkan untuk mengemudikan kendaraan ke area yang aman untuk berhenti.
- Mungkin ada situasi di mana sistem tidak bekerja dengan baik dan Anda tidak dapat mengemudi.
- Tingkat 5. Otomatisasi lengkap.
- Seperti pada kasus sebelumnya, kecepatan dikontrol baik dengan jalur tuas otonom.
- Ini sepenuhnya mengotomatiskan respons terhadap mengemudi atau rintangan yang tidak terduga.
- Ada sistem cadangan yang mampu mengambil kendali hingga kendaraan berhenti.
- Tidak ada batasan untuk penggunaan sistem dan dapat digunakan dalam kondisi apa pun, seperti halnya manusia.
- Tidak perlu kehadiran orang di dalam kendaraan.
Model mobil otonom saat ini
Kita dapat menemukan semakin banyak model mobil otonom di pasar, dengan tingkat otonomi yang berbeda. Dalam klasifikasi yang diberikan di atas, kita dapat menemukan kasus kendaraan dari tingkat yang berbeda.
Pada level 0, hampir semua model yang ada di pasaran, baik ekonomis maupun lama , yang tidak memiliki bantuan apa pun dan membutuhkan tindakan 100% dari pengemudi. Juga termasuk dalam kelompok ini adalah mereka yang memiliki bantuan seperti pengereman darurat atau lajur atau penjagaan kecepatan.
Jika kendaraan ini menambahkan fungsi kontrol jelajah adaptif , kita akan berbicara tentang level 1, karena mampu menjaga jarak ke kendaraan sebelumnya secara otomatis. Juga termasuk yang menggabungkan dibantu parkir kapasitas jika hanya bekerja pada putaran roda. Dalam kategori ini juga ada sejumlah besar kendaraan di pasar .
Pada level 2 terdapat lebih sedikit model yang terdapat dalam kategori ini. Mereka berorientasi pada sistem untuk digunakan di jalan raya , jauh lebih rumit yang memungkinkan reaksi otomatis dengan kondisi lalu lintas, yang bahkan dapat berhenti dalam kemacetan lalu lintas.
Merek yang paling representatif dengan sistem seperti ini adalah Mercedes-Benz (Drive Pilot ), Nissan (ProPilot ), Volvo (Bantuan Pilot ), Audi atau BMW . Terakhir, jika sistem bantuan parkir tambahan mengontrol throttle, mereka juga termasuk dalam level ini.
Di level 3 mengemudi otonom , kasus merek atau model yang menggabungkannya bersifat diskrit. Yang paling terkenal adalah Tesla dengan Autopilot-nya, yang memungkinkan Anda memprediksi kondisi lalu lintas di jalan dan bahkan mengubah jalur untuk menyalip tanpa campur tangan pengemudi, tanpa membatasi fungsinya di jalan raya.
Untuk tingkat 4 otonomi sangat sulit untuk menemukan model komersial , karena, meskipun banyak dari mereka sedang dalam pengembangan, mereka belum dikomersialkan. Yang paling penting adalah Google, yang telah mengumpulkan banyak kilometer mengemudi secara mandiri dan semakin mendekati kenyataan.
Seperti pada kasus sebelumnya, hanya ada prototipe kendaraan dengan level 5 , dan yang paling canggih lagi adalah Google. Ada varian model ini tanpa setir atau pedal, yang telah diuji untuk tur singkat dan dalam kondisi ideal.

Perkiraan masa depan untuk mobil otonom
Sulit untuk memperkirakan bagaimana evolusi sistem ini akan maju, karena setiap merek berbagi cakrawala mereka dengan cara yang sangat halus. Yang jelas penerapan mengemudi secara otonom harus berjalan seiring dengan kesadaran pengemudi, untuk menghindari kecelakaan karena pengemudi tidak memperhatikan kemungkinan kejadian.
Sekarang, diharapkan pada tahun 2025 sebagian besar model dengan otonomi hingga level 3 akan dirilis, yang akan membantu meletakkan dasar bagi undang-undang baru yang harus berjalan seiring dengan kemajuan ini.
Sejak musim panas ini, PBB telah menandatangani peraturan untuk membatasi penggunaan kendaraan otonom level 4 dan 5 dan mencegahnya beroperasi di dekat pejalan kaki. Menurut dokumen ini, untuk saat ini sistem ini (level 4 dan 5) hanya dapat diaktifkan di jalan yang tidak mengizinkan pejalan kaki, pengendara sepeda, atau lalu lintas serupa.
Juga harus ada pemisahan fisik antara arah pergerakan, dengan kecepatan dibatasi hingga 60km/jam. Terakhir, semua penumpang wajib duduk dengan benar dan dengan sabuk pengaman terpasang.
Apakah Anda ingin menerapkan AGV di salah satu Proyek Anda? Hubungi kami!


