














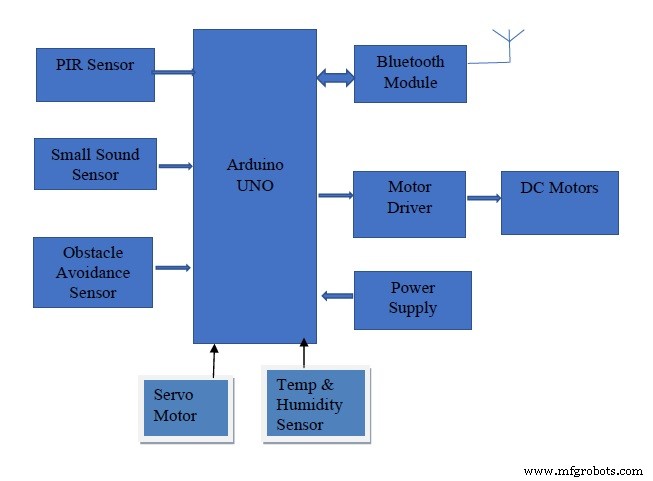
 Diagram Sirkuit ini menunjukkan konfigurasi koneksi antara berbagai Sensor dengan Board Arduino Uno
Diagram Sirkuit ini menunjukkan konfigurasi koneksi antara berbagai Sensor dengan Board Arduino Uno 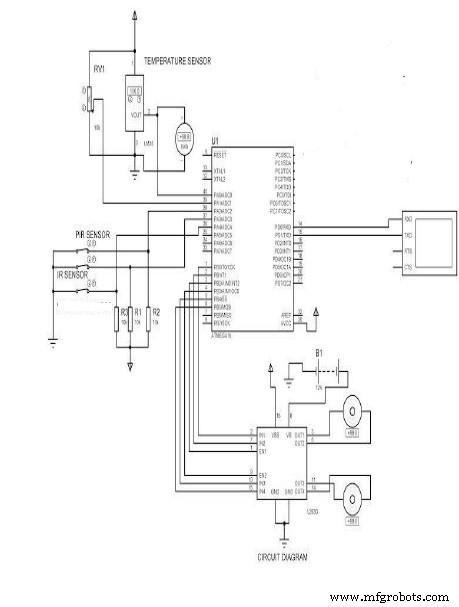 Bagan Alur ini menunjukkan cara kerja sistem
Bagan Alur ini menunjukkan cara kerja sistem 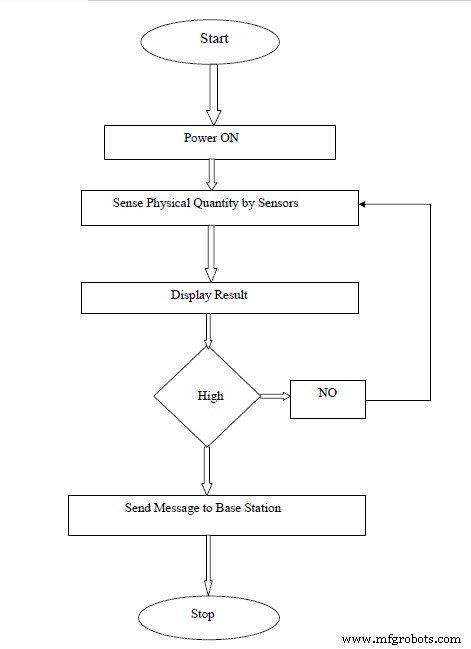
Proses manufaktur
- DETEKSI MANUSIA ROBOT SONBI MENGGUNAKAN KINECT DAN RASPBERRY PI
- Membuat Boneka Permainan Squid menggunakan Arduino UNO
- Kirim data sensor dari satu Arduino ke Arduino lainnya menggunakan Firebase
- Sistem Kehadiran Menggunakan Arduino dan RFID dengan Python
- Sensor Detak Jantung Inframerah DIY menggunakan Arduino
- Mainan yang Dikendalikan Android Menggunakan Raspberry Motor Shield
- IOT - Smart Jar Menggunakan ESP8266, Arduino dan Sensor Ultrasonik
- WebServerBlink Menggunakan Arduino Uno WiFi
- Sistem Pemantauan &Deteksi Kebakaran Hutan (dengan Peringatan SMS)
- Menggunakan sensor pulsa wearable MAX30100 dengan Arduino