

Proses manufaktur

Manufaktur industri
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 |
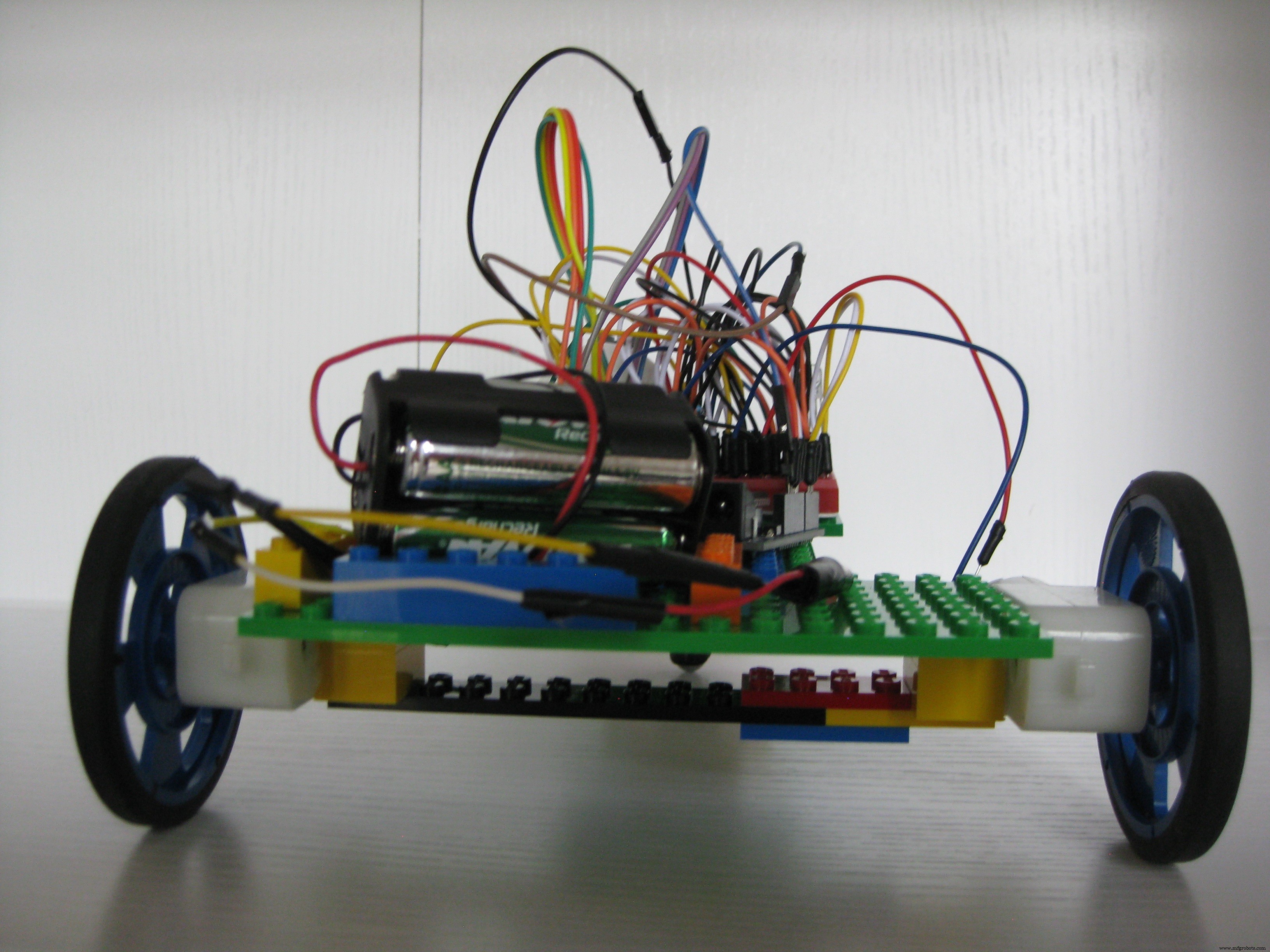
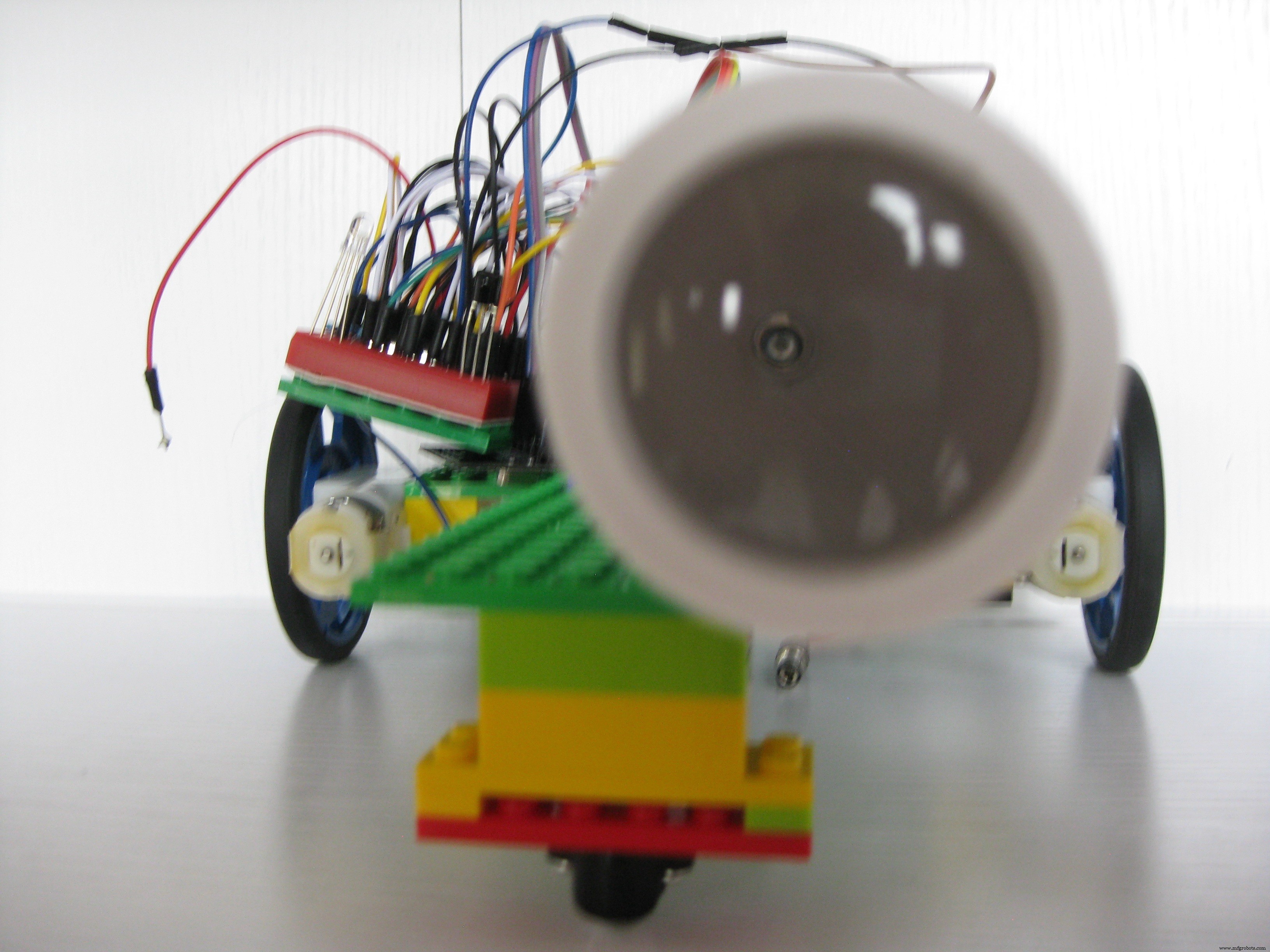
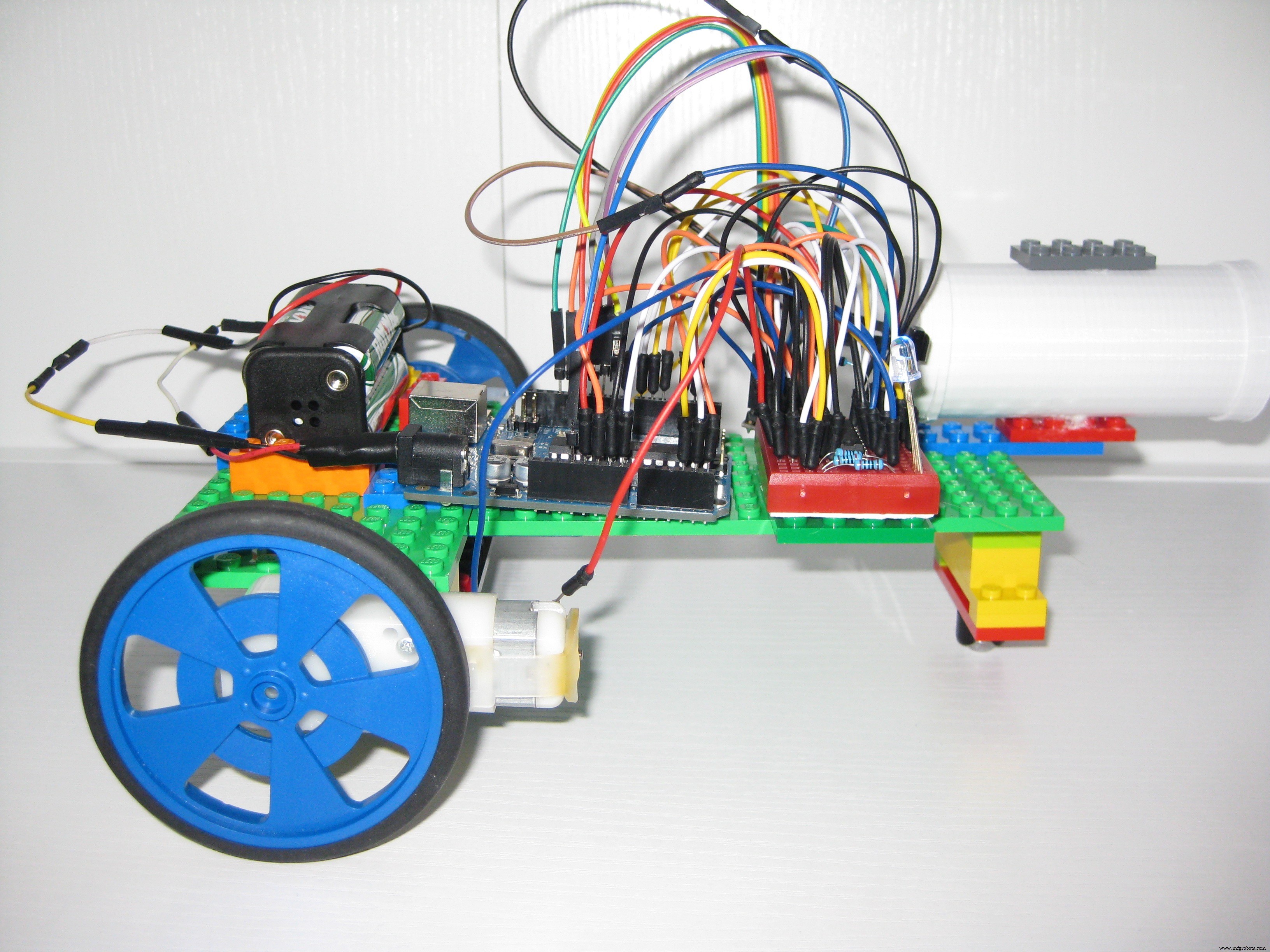
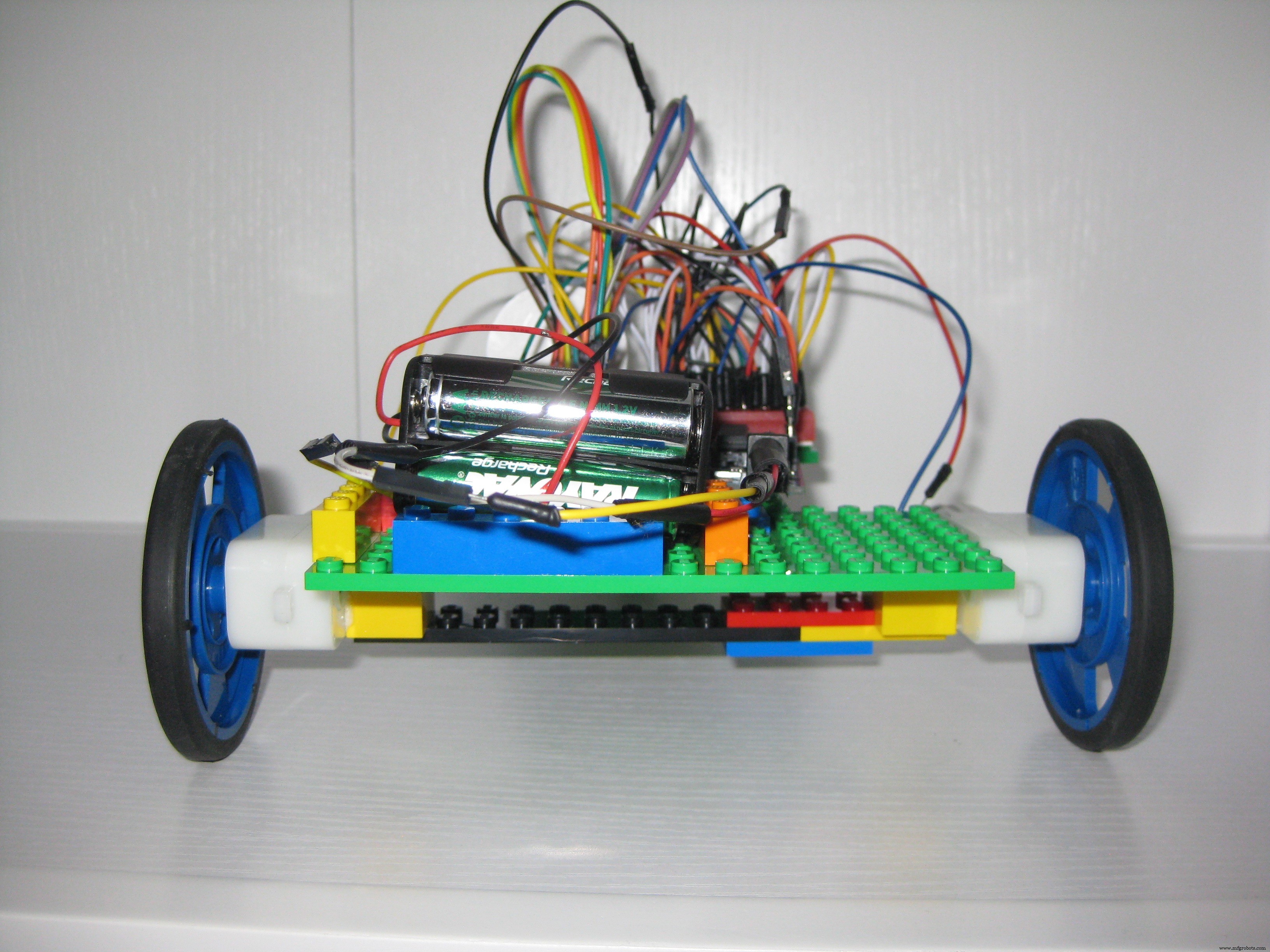
Tujuan dari proyek ini adalah untuk membuat satu set tank robot untuk melakukan pertempuran di mana operator mendapatkan perasaan yang lebih realistis untuk mengendalikan kendaraan menggunakan pengontrol Leap Motion. Saya ingin membuat tank robot dengan biaya murah, sehingga orang dapat mereplikasi proyek ini semudah mungkin.
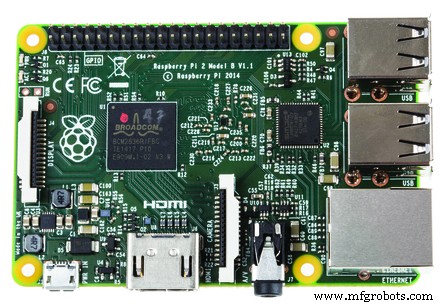
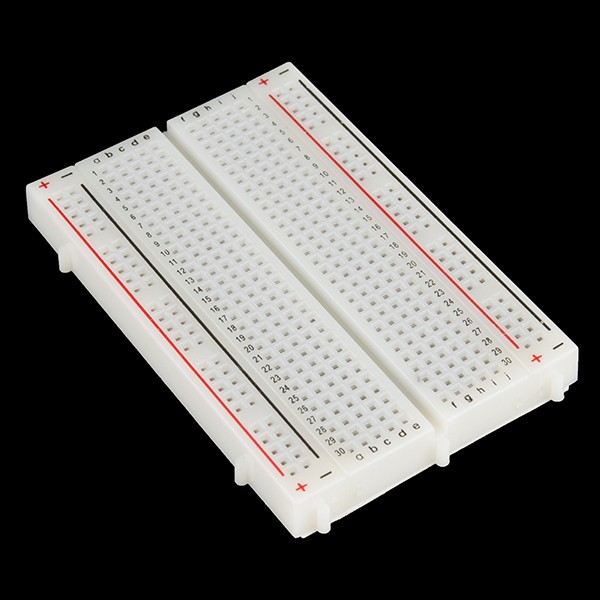
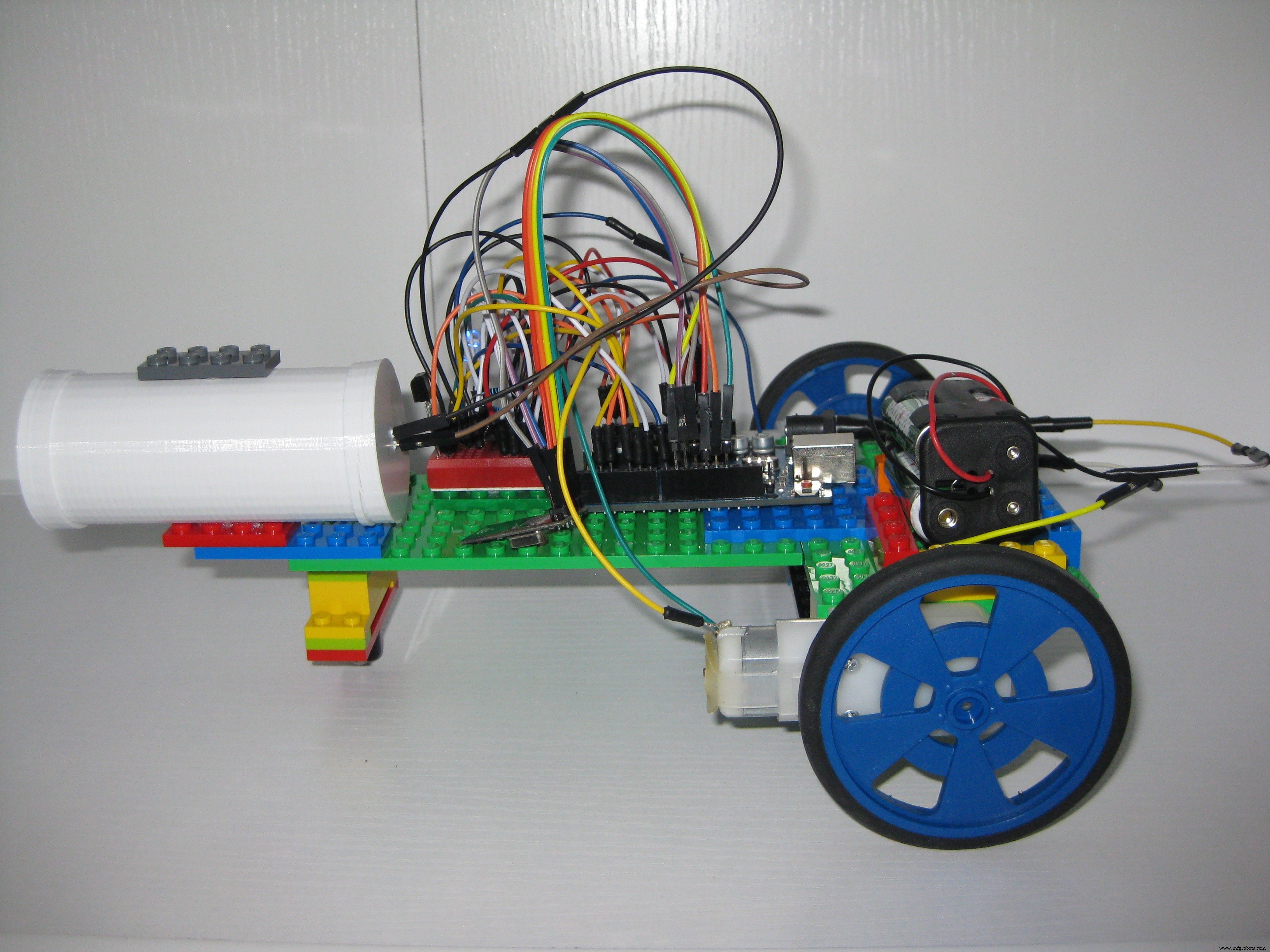
Badan tangki terbuat dari batu bata dan pelat Lego generik. Sumber daya adalah blok sederhana dari 4 baterai isi ulang AA. Kontroler untuk tangki adalah Arduino Uno R3. "Propulsi" adalah dua motor DC sederhana dengan roda di belakang dengan kastor tunggal di depan menggunakan sirkuit terintegrasi L293D tunggal. "Persenjataan" adalah lampu LED IR tunggal dan "baju besi" adalah seperangkat sensor IR yang mendeteksi serangan dari tangki IR LED lawan. "Tampilan kepala" adalah LED multi-warna tunggal yang memberi tahu Anda tentang tindakan apa pun yang terjadi pada tangki termasuk status pelindung Anda. Akhirnya "kontrol" tangki ditangani secara nirkabel melalui Raspberry Pi 2 yang menjalankan NodeJS yang terhubung melalui modul nirkabel RF24 yang juga dilengkapi dengan masing-masing tangki.
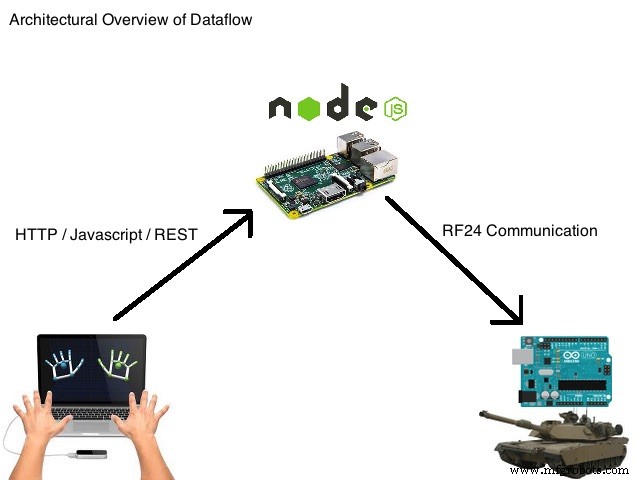
Menggunakan tangan operator, Leap Motion mengontrol tangki menggunakan Leap Motion Javascript SDK. Menggunakan SDK untuk mendeteksi gerakan tangan, javascript berkomunikasi dengan server NodeJS pada Raspberry PI 2, yang pada gilirannya berkomunikasi dengan tangki melalui modul RF24. Kedua tangan ke depan, tangki bergerak maju. Kedua tangan ke belakang, tangki bergerak mundur. Tangan kiri ke depan, tangan kanan ke belakang, tangki berbelok ke kanan. Tangan kanan ke depan, tangan kiri ke belakang, tangki berbelok ke kiri. Kedua tangan dalam posisi "netral" akan menghentikan tangki. Satu tangan ke depan (kiri atau kanan) sambil menjatuhkan tangan lainnya akan "menembakkan" senjata tank.
Berikut adalah demonstrasi singkat dari senjata Tank, baju besi dan tampilan kepala.
Menggunakan armor canggih dan kotak kardus omni directional sebagai tempat berlindung, Laser Tank menjadi permainan berburu dan menghindar.
Langkah-Langkah Penyiapan Proyek:
1) Rakit tangki dan sambungkan menggunakan skema di bawah ini. Unduh perpustakaan Arduino yang diperlukan (lihat README di repositori github), Kompilasi, dan Unggah sketsa thearduino untuk tangki1 ke satu tangki, dan tangki2 ke tangki lainnya.
2) Hubungkan transceiver RF24 ke Raspberry Pi. Instal Raspbian OS dan node JS di Pi.
3) Unduh, Konfigurasi, dan Bangun (lihat README di repositori github) pustaka RF24 di Pi.
4)Unduh perangkat lunak server NodeJS dari situs github, konfigurasikan, dan mulai Server Aplikasi/server Web (lihat README di githubrepository).
5) Instal Leap Motion dan driver ke komputer Anda. Buka browser dan muat URL ke server Raspberry Pi Rest/Web untuk memuat halaman web (lihat README di repositori github) untuk mengontrol tangki satu atau tangki dua.
6) Klik tombol kalibrasi dan tahan tangan Anda di atas gerakan lompatan sehingga mendeteksi dua tangan dan mengetahui posisi netral Anda. Setelah kalibrasi selesai, Anda dapat mengontrol tangki dengan tangan Anda.
Catatan singkat tentang sasis tangki:
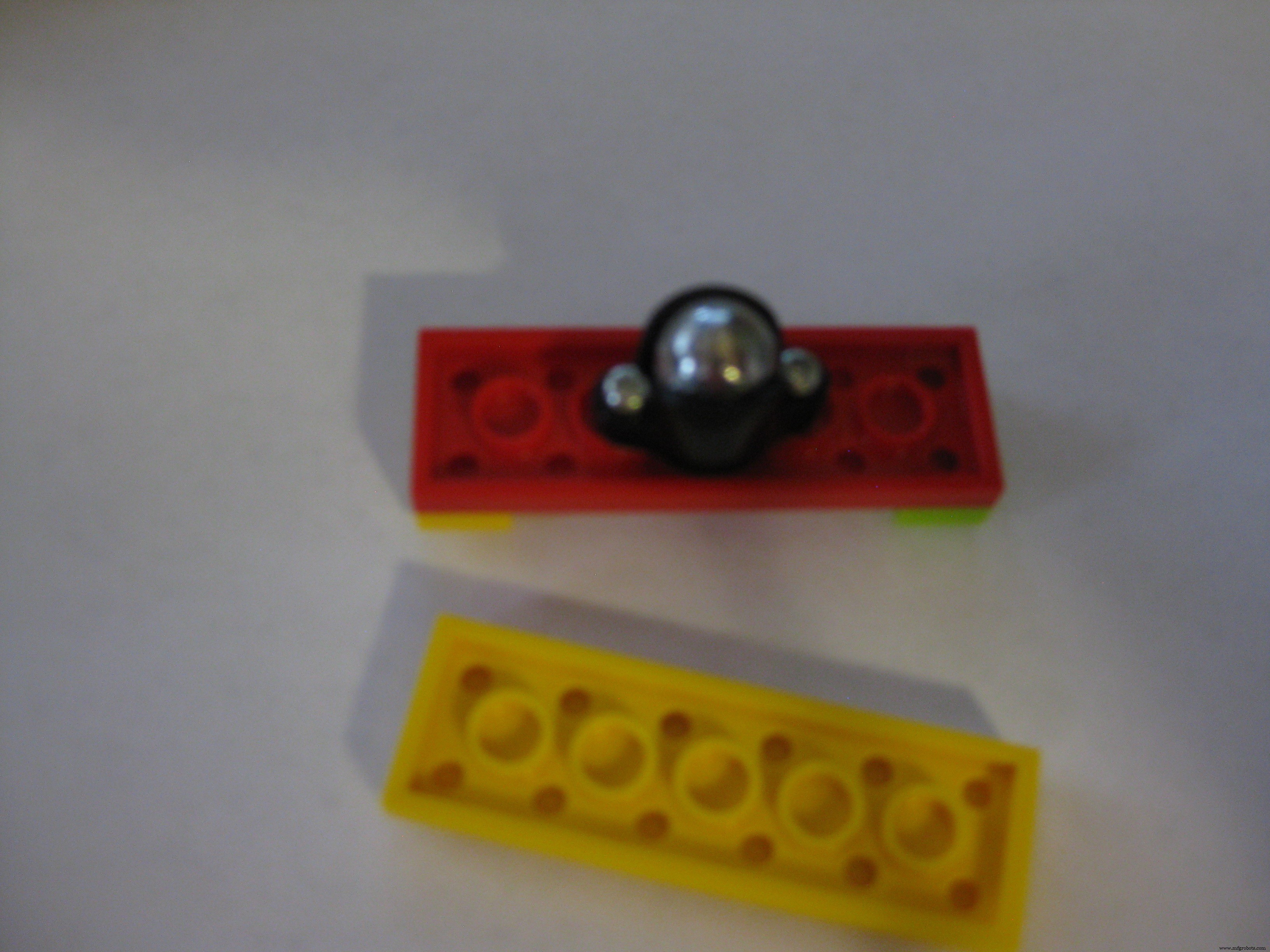
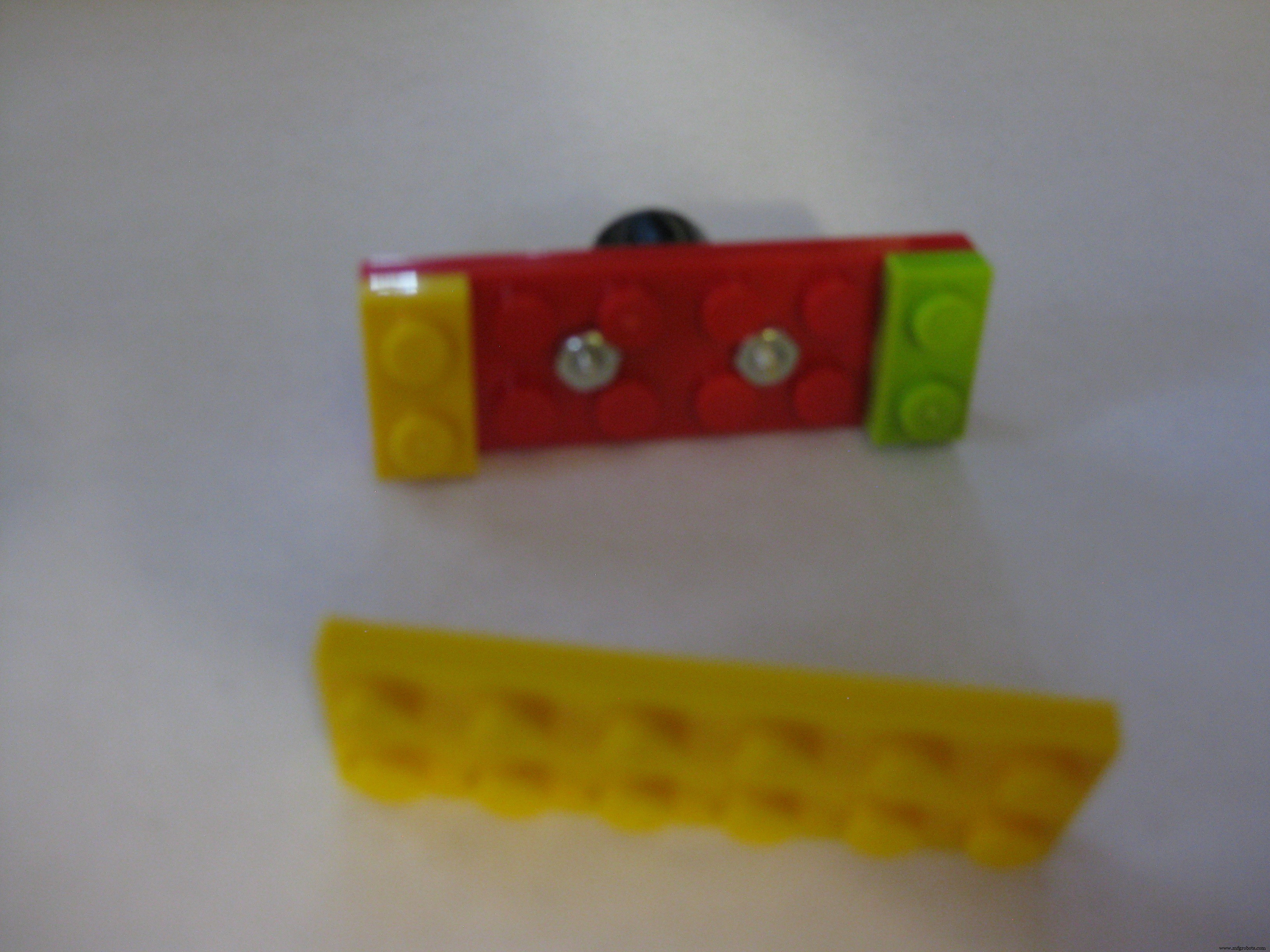
Tubuh tangki dirakit dari lego sederhana yang "dilem gorila" ke bagian-bagian (motor, papan tempat memotong roti, dll) tangki untuk membantu menyatukannya. Berikut adalah tayangan slide untuk menunjukkan bagaimana hal ini dilakukan.


Catatan singkat tentang LED Inframerah:
Remote control inframerah sangat fungsional ketika Anda ingin duduk di sofa, atau lantai, atau kursi dan dapat mengubah saluran di TV Anda dari mana saja. LED inframerah dibuat agar berkas cahaya masuk ke berbagai arah untuk meningkatkan jangkauan. Tapi, jika ingin mengontrol pancaran LED menjadi lebih kecil agar lebih sulit untuk menekan sensor jarak jauh (seperti di game tank battle) sedikit lebih sulit. Dalam bacaan saya, saya menemukan bahwa dengan menggunakan lensa kaca pembesar yang sangat sederhana di ujung tabung, Anda dapat memfokuskan sinar Inframerah. Berikut adalah diagram yang menunjukkan apa yang saya bicarakan:
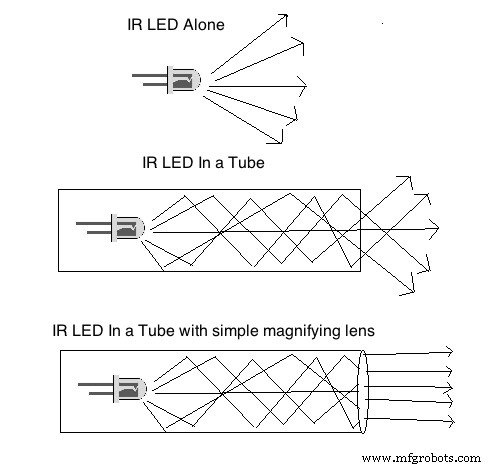
Saya akhirnya membeli kaca pembesar saku yang sangat murah di toko obat, mengeluarkan lensa dari itu dan membuat tabung di sekelilingnya dan memiliki LED Inframerah di ujung tabung yang lain, dan ini bekerja dengan sempurna untuk mempersempit pancaran sinar. IR LED lebih tepatnya.
Catatan singkat tentang Sensor Inframerah 360 derajat
Sensor inframerah mampu mendeteksi sinyal dari LED inframerah ketika LED tersebut berada tepat di depannya atau sekitar 90 derajat fokus. Jika LED Inframerah berada di belakang sensor, ia tidak akan dapat mendeteksi sinyal yang dikirim.
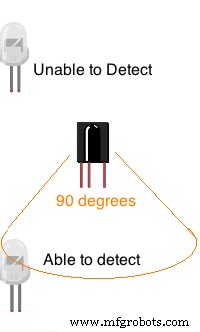
Untuk mencapai sudut deteksi 360 derajat penuh, Anda perlu memodifikasi pustaka inframerah untuk mendeteksi sinyal pada 4 pin berbeda dari 4 sensor berbeda, atau membuat solusi perangkat keras yang memungkinkan 4 sensor dirangkai daisy untuk melaporkan satu pin. Saya menemukan beberapa artikel online yang menunjukkan bagaimana Anda dapat mencapai ini dengan sirkuit terpadu DAN sederhana untuk menghubungkan 4 sensor ke satu pin input. Ketika salah satu sensor inframerah mendeteksi sinyal inframerah, ia melaporkannya pada pin itu. Ini memungkinkan untuk mendapatkan deteksi 360 derajat, tanpa perlu memodifikasi library Inframerah, atau menggunakan hingga 4 pin input.

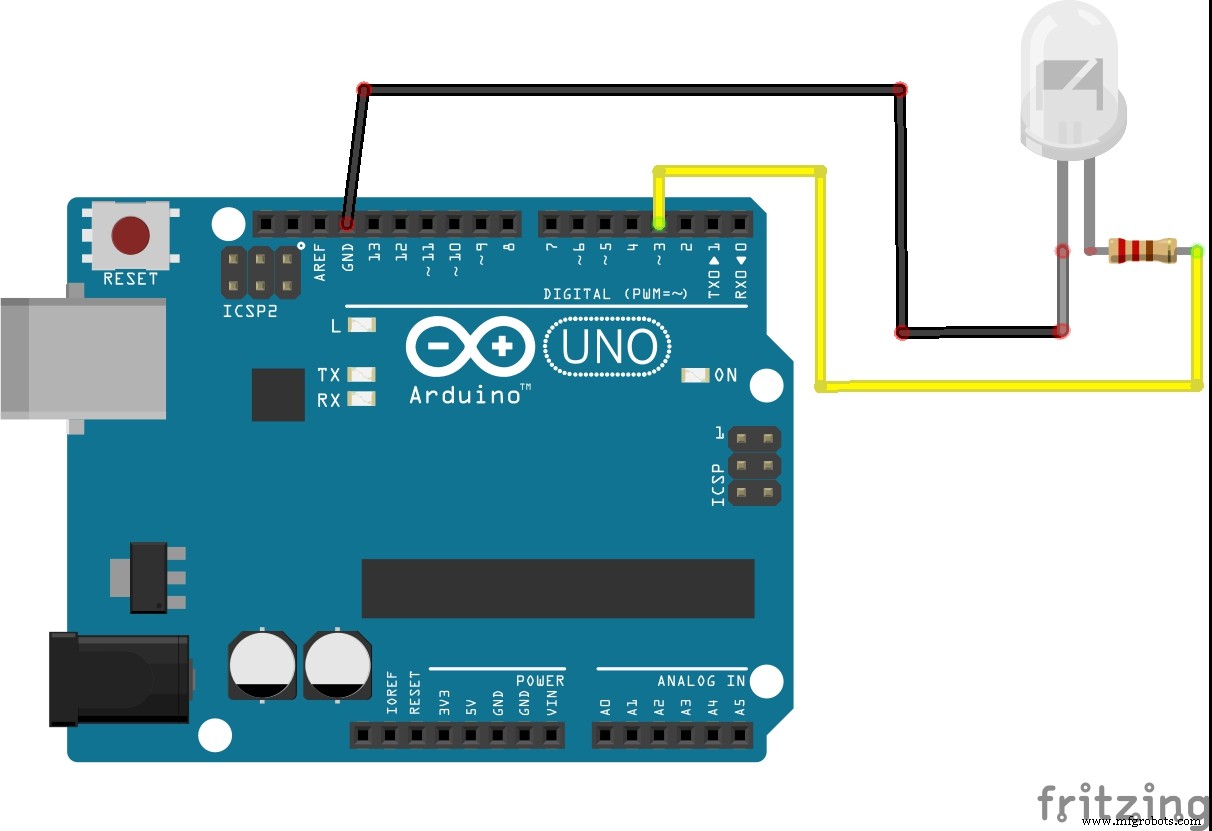 Menggunakan Sensor Inframerah tunggal, tangki dapat mendeteksi ketika sinyal inframerah datang dari tangki lawan dan mendaftarkannya sebagai hits
Menggunakan Sensor Inframerah tunggal, tangki dapat mendeteksi ketika sinyal inframerah datang dari tangki lawan dan mendaftarkannya sebagai hits 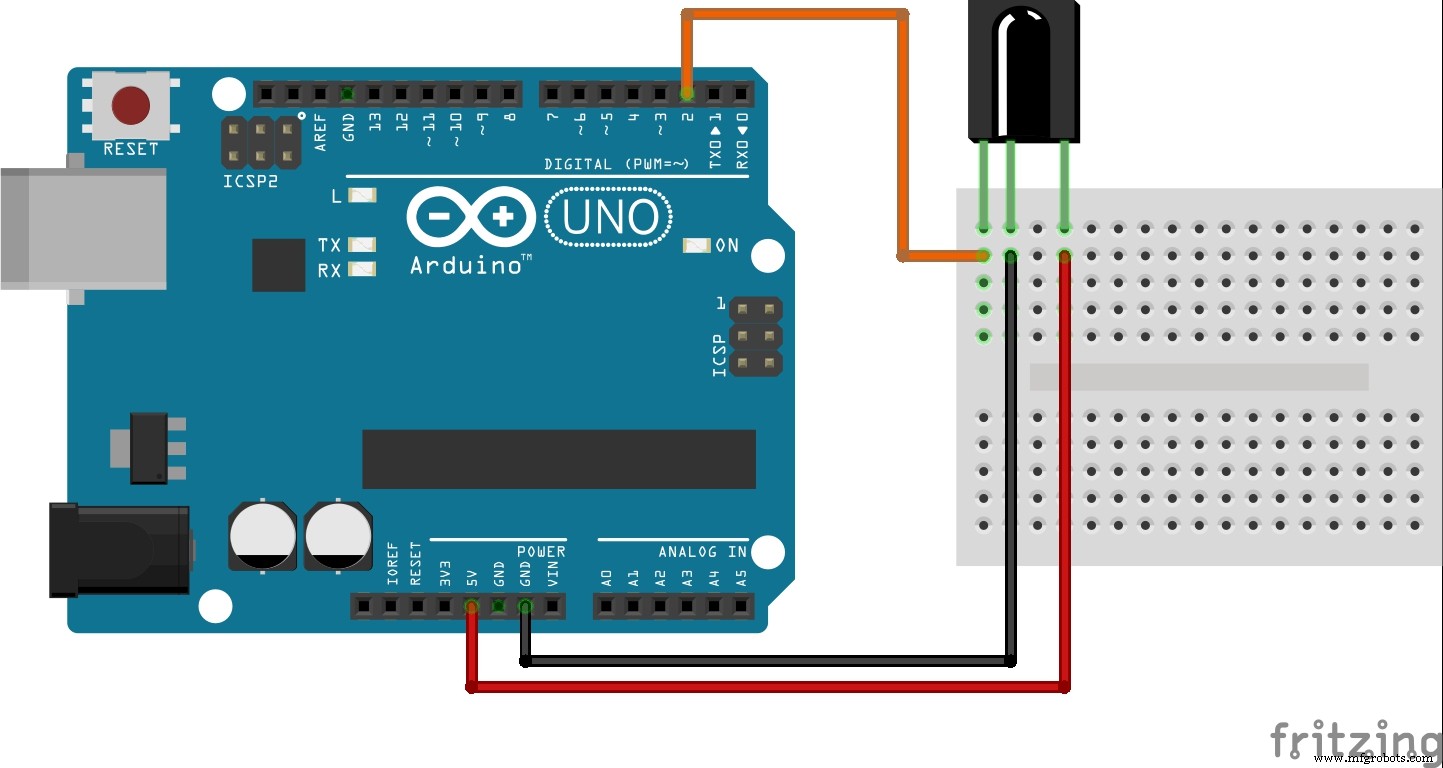 Menggunakan 4 sensor inframerah, daisy dirantai bersama dengan sirkuit terpadu gerbang AND sederhana (74HCT21), sebuah Tank mampu untuk mengidentifikasi sinyal inframerah dari LED Tank lawan sebagai hit dari 360 derajat di sekitarnya.
Menggunakan 4 sensor inframerah, daisy dirantai bersama dengan sirkuit terpadu gerbang AND sederhana (74HCT21), sebuah Tank mampu untuk mengidentifikasi sinyal inframerah dari LED Tank lawan sebagai hit dari 360 derajat di sekitarnya. 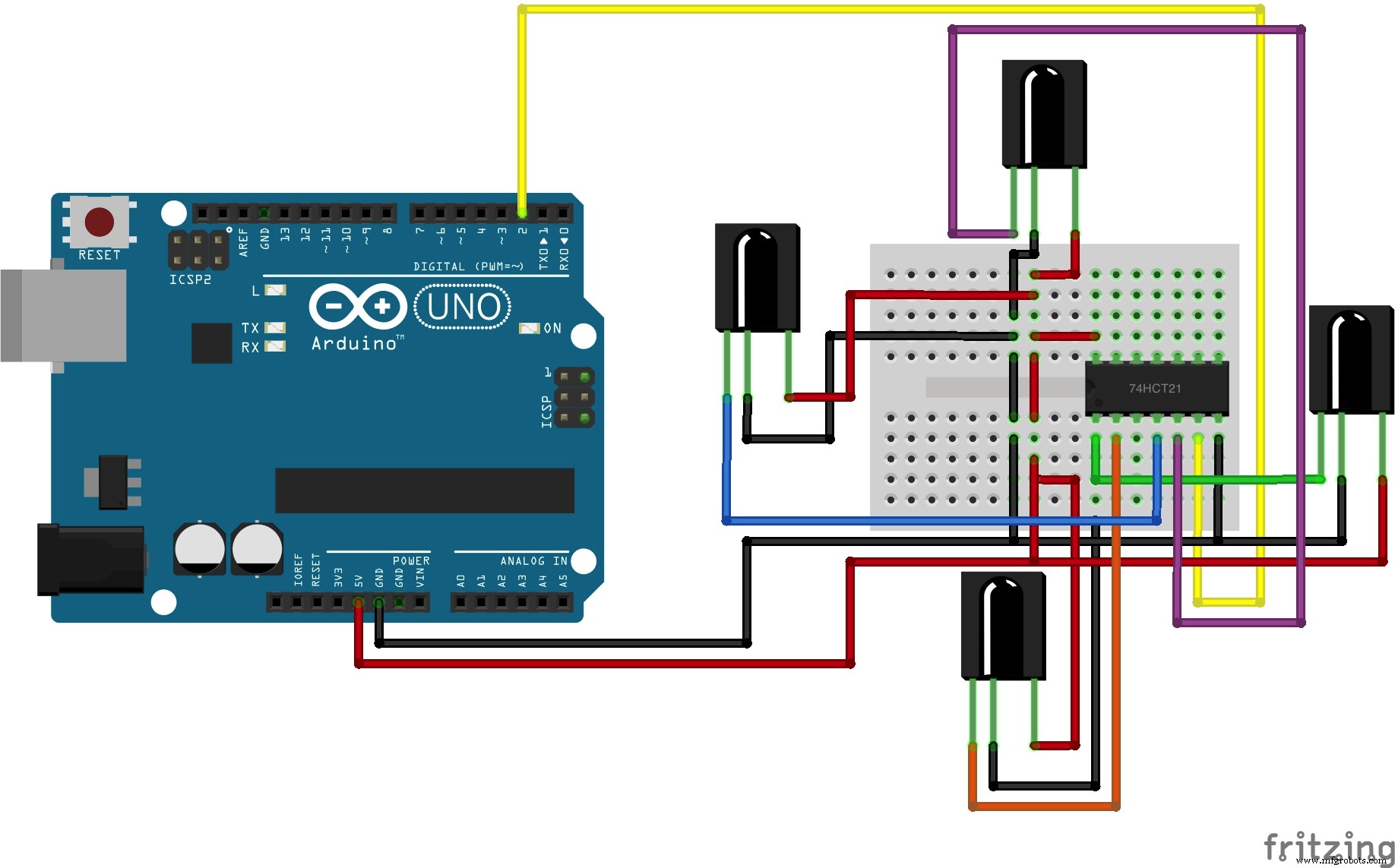 Menggunakan LED RGB, Tangki mengidentifikasi statusnya saat ini (berapa banyak pukulan yang telah diambil) dengan mengubah warna dari LED. Juga, tangki mengubah warna LED menjadi Hijau untuk setiap tembakan yang ditembakkan.
Menggunakan LED RGB, Tangki mengidentifikasi statusnya saat ini (berapa banyak pukulan yang telah diambil) dengan mengubah warna dari LED. Juga, tangki mengubah warna LED menjadi Hijau untuk setiap tembakan yang ditembakkan. 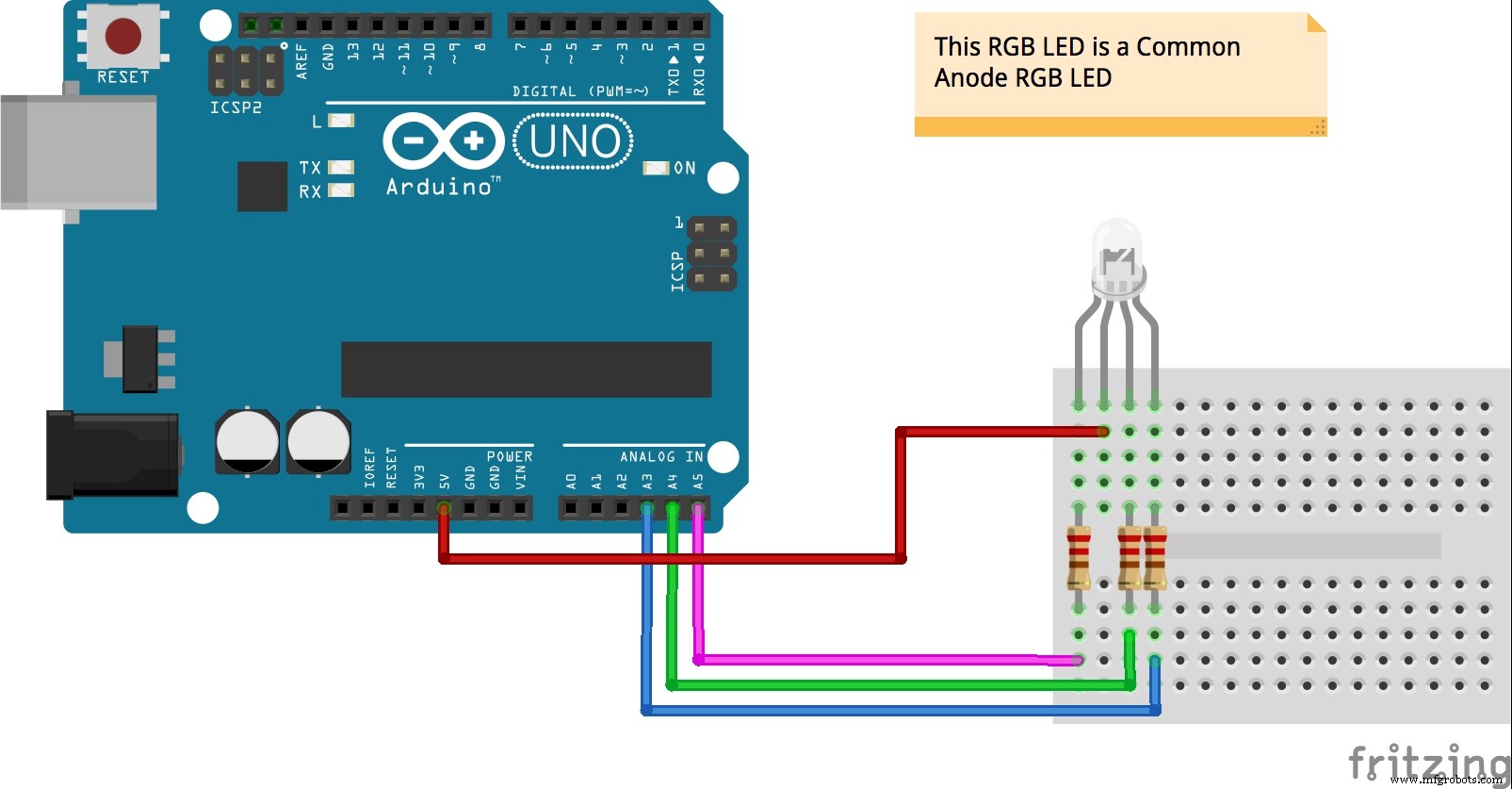 Menggunakan sirkuit terintegrasi L293D, dan beberapa motor DC sederhana, tangki dapat bergerak maju, mundur, dan berputar kiri atau kanan.
Menggunakan sirkuit terintegrasi L293D, dan beberapa motor DC sederhana, tangki dapat bergerak maju, mundur, dan berputar kiri atau kanan. 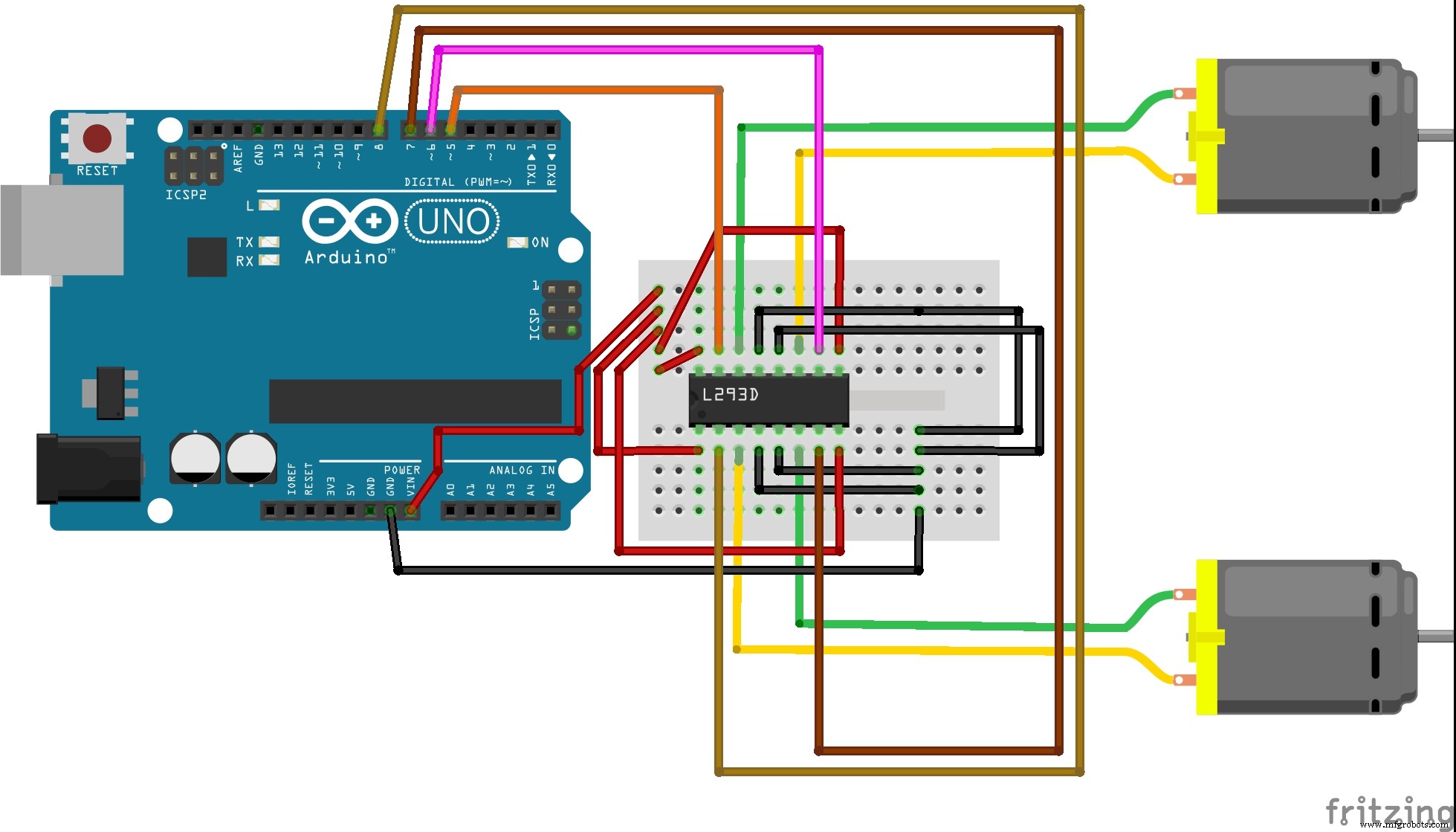 Menggunakan transciever RF24 yang sederhana dan murah, tangki dapat berkomunikasi dan menerima perintah dari operator.
Menggunakan transciever RF24 yang sederhana dan murah, tangki dapat berkomunikasi dan menerima perintah dari operator. 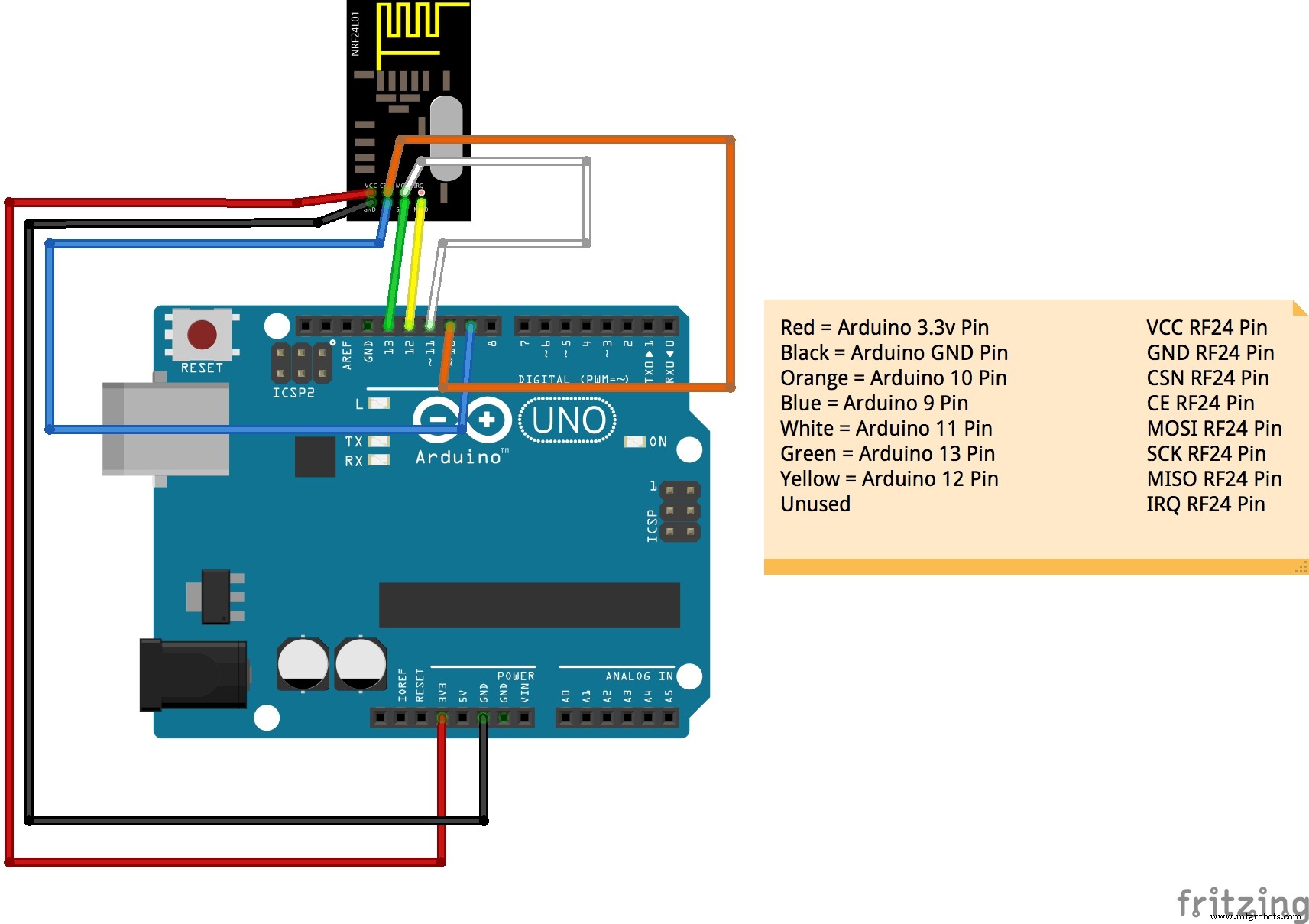 Menggunakan Raspberry Pi2, transciever RF24 yang sederhana dan murah, dan Node JS, Operator dapat berkomunikasi dengan setiap tangki melalui panggilan REST API.
Menggunakan Raspberry Pi2, transciever RF24 yang sederhana dan murah, dan Node JS, Operator dapat berkomunikasi dengan setiap tangki melalui panggilan REST API. 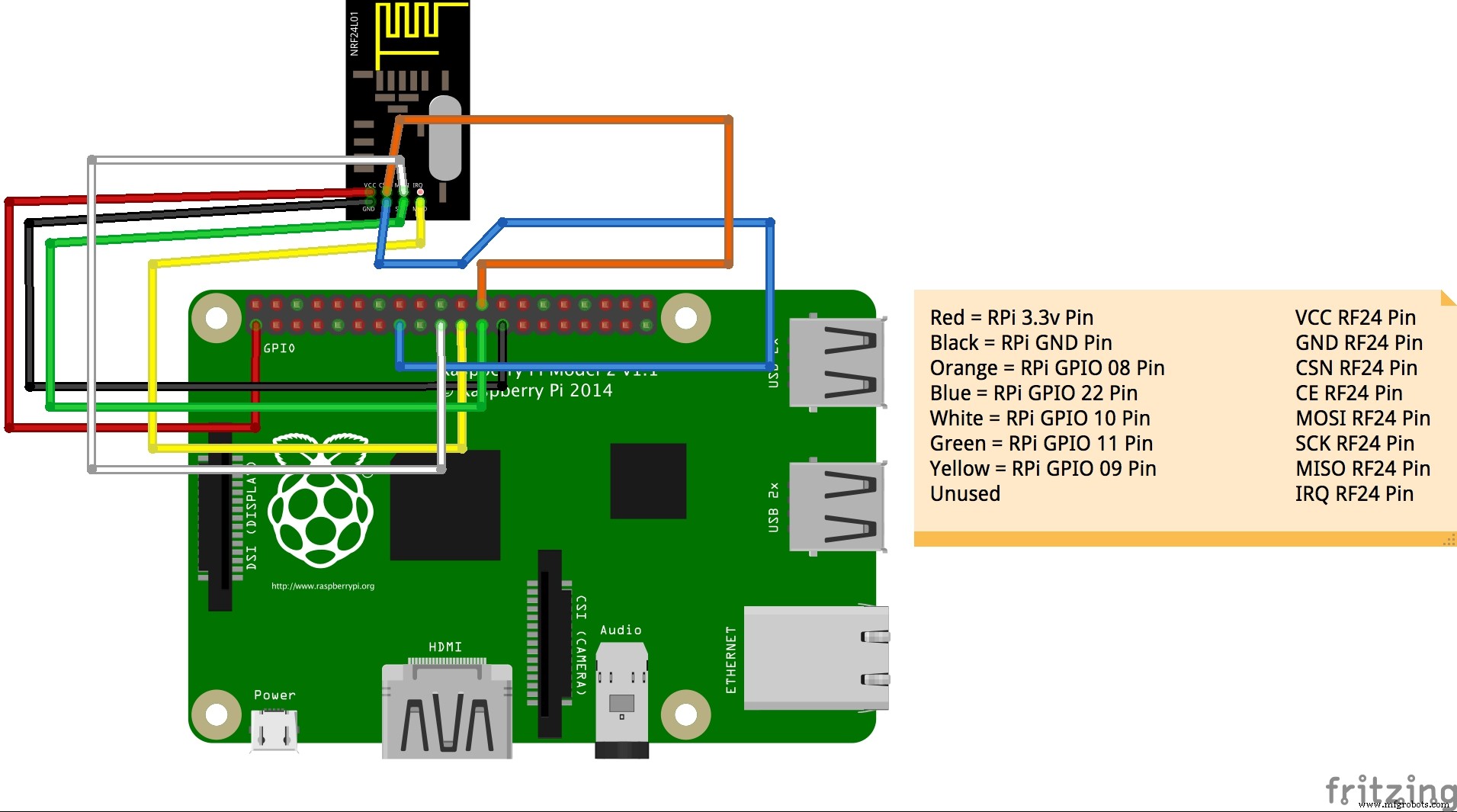
Proses manufaktur
Komponen dan persediaan SparkFun Arduino Pro Mini 328 - 3.3V/8MHz × 1 Servo (Tower Pro MG996R) × 1 Sakelar Geser × 1 OpenBuilds Cable Ties (10 Pack) × 1 Kabel jumper (generik) × 1 Baterai Li-Ion 1000mAh × 1 Bola Ping Pong × 1
Komponen dan persediaan SparkFun Arduino Pro Mini 328 - 5V/16MHz × 1 Adafruit LiIon/LiPoly Backpack Add-On untuk Pro Trinket/ItsyBitsy × 1 strip NeoPixel × 1 Sensor Pemantulan QTR-1A × 1 Baterai LiPo 3,7 V × 1 Aplikasi dan layanan online
Komponen dan persediaan Arduino UNO Atau Papan Arduino Uno yang kompatibel × 1 Ukuran Setengah Papan Tempat Memotong Roti Tanpa Solder × 1 Resistor 10k ohm × 3 Kabel jumper (generik) × 1 Resistor foto × 2 Dioda Laser × 1 Sakelar Tom
Komponen dan persediaan Arduino UNO Salah satu komponen utama. × 1 Sensor Ultrasonik - HC-SR04 (Generik) Salah satu komponen utama. × 1 Baterai Li-Ion 1000mAh Salah satu komponen utama. × 2 Katoda Umum Difusi RGB Salah satu komponen utama. × 1 Buzzer Sala