

Proses manufaktur

Manufaktur industri
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 |
 |
|
Latar belakang
Ini adalah robot kecil yang cepat dan mudah yang dapat dibuat dan dirakit dalam waktu sekitar setengah jam dengan alat dan suku cadang yang tepat.
Saya tidak menciptakannya. Saya melihat video seperti ini di YouTube dan berpikir 'Hei, itu terlihat menyenangkan, saya akan membuatnya.'
Jadi saya mengambil beberapa servos dari kotak sampah saya, baterai ponsel lama yang saya simpan dengan harapan menemukan sesuatu yang keren untuk dilakukan dengannya, Arduino Pro 3.3v yang saya beli karena keinginan untuk mencapai kuota. pengiriman gratis dan mulai bekerja.
Sekitar satu jam kemudian, ini dia!
Perakitan
Mari kita mulai dengan perakitan dasar.
Potong lengan pemasangan yang berada di seberang sisi tempat kabel keluar pada salah satu servos (ini akan menjadi servo belakang Anda). Servo belakang mengarah ke bawah dan yang lainnya ke depan. Anda dapat menggunakan perekat atau pengikat kabel untuk menyatukannya.

Selanjutnya, kaitkan kabel merah dan hitam ke positif dan negatif baterai ponsel Anda (saya menahannya dengan selotip listrik). Jika Anda memiliki baterai Li-Ion, Anda tidak perlu repot dengan itu :)
Lalu saya menempelkan papan tempat memotong roti mini ke baterai. Anda tidak harus, tentu saja. Itu tergantung apakah Anda berencana untuk menggunakan kembali bagian-bagian robot ini atau tidak.
Ikat kabel baterai dan papan tempat memotong roti ke alat servo.
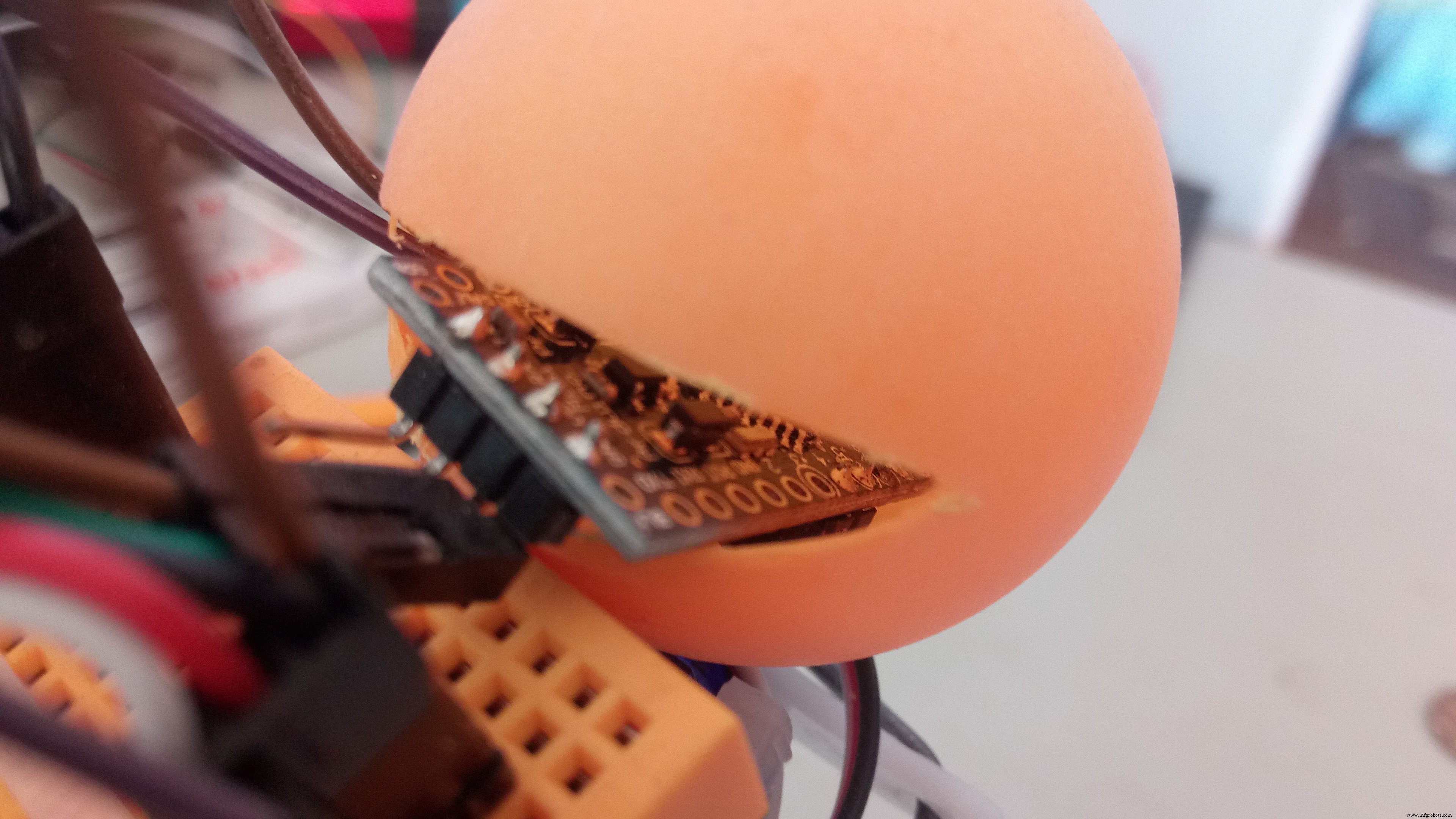
Potong irisan ke dalam bola pingpong. Kedengarannya mudah, bukan? :) Ini mungkin langkah tersulit dari keseluruhan tutorial ini! Bola pingpong sangat padat dan juga... bulat. Memotong sesuatu membutuhkan kesabaran. Dan pakai kacamata !!! Tidak masalah perangkat apa yang Anda gunakan untuk memotongnya. Plastik (atau bahan aneh apa pun yang terbuat dari tambang) banyak pecah. Jadi kacamata ! Saya ingin Anda tetap dapat membaca sisa tutorial ini setelah Anda selesai memotong!
Periksa apakah Arduino Anda pas di lubang dengan baik. Lalu rekatkan bola pingpong ke hewan lainnya.
Untuk kaki, saya meninggalkan Anda ke perangkat Anda sendiri. Milik saya adalah potongan sederhana dari kawat baja setebal 1mm yang ditekuk ke dalam dan di sekitar pemasangan sayap servos (seperti pada gambar) Di ujung setiap kaki, saya menempatkan potongan kaki kecil dari tongkat lem untuk pegangan.
Cukup panaskan kawat dengan pemantik api dan tanam di kaki pengganti Anda. lem akan meleleh saat disentuh dan mengeras kembali dengan sangat cepat.
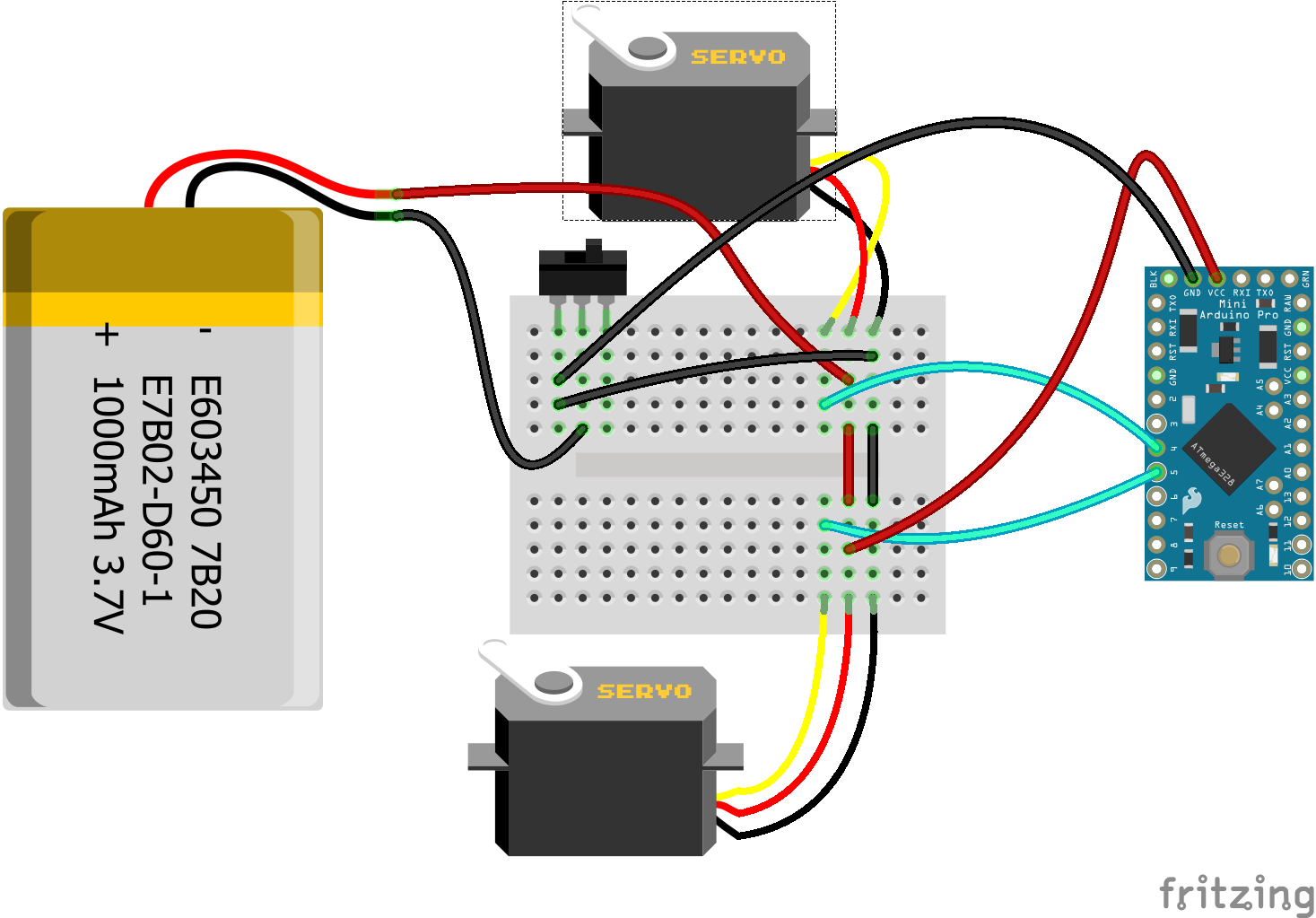
Sebelum Anda menempelkan kaki ke sisa monster, Anda harus melakukan sirkuit dan memuat sketsa ke papan. Anda perlu membaca ini jika Anda tidak tahu cara mengunggah sketsa ke Arduino Pro Mini. https://www.arduino.cc/en/Guide/ArduinoProMini
Kode untuk yang satu ini sangat sederhana jadi saya tidak akan membahasnya.
Ini memiliki penundaan 5 detik di akhir pengaturan sehingga Anda punya waktu untuk mencabut Arduino Anda sebelum kaki mulai bergerak tetapi setelah memusatkannya.
Sekarang Anda dapat menempatkan kaki Anda dan mengencangkannya di tempatnya.
Setelah kaki disekrup pada tempatnya, Anda bahkan dapat memilih untuk mengedit program dan mempersingkat (atau menghapus) penundaan pada baris 13.
Demonstrasi
Jika semuanya berjalan dengan baik, Anda sekarang harus memiliki seorang pria kecil yang lucu yang terlihat sedikit seperti ini:
Dan lihat video Triceratops ClaudioGasp di komentar! Luar biasa!
#includeint FRONT =4;int BACK =5;Servo frontLegs, backLegs;void setup() { pinMode(13, OUTPUT); //Ini hanya untuk frontLegs.attach(FRONT); kaki belakang.attach(KEMBALI); kaki depan.tulis(90); //Tengahkan servo backLegs.write(90); //Tengahkan penundaan servo(5000); //Tunggu 5 detik (Ini memberi kita waktu untuk mencabut arduino // jadi kita bisa memasang kaki.}void loop() { digitalWrite(13,HIGH); //LED on delay(200); frontLegs.write(70 ); //gerakkan kaki depan sedikit delay(200); backLegs.write(70); //gerakkan kaki belakang sedikit digitalWrite(13,LOW); //LED off delay(200); frontLegs.write(110); //gerakkan kaki depan sedikit delay(200); backLegs.write(110); //gerakkan kaki belakang sedikit}
Proses manufaktur
Komponen dan persediaan Arduino UNO × 1 Adafruit 16 Channel PWM Servo Motor Controller × 3 Motor servo mikro SG90 × 36 Sumber Daya Sakelar 5 volt 30 watt × 1 Ekstensi Kabel Motor Servo × 1 24 inci x 48 inci. Papan Pasak × 1 Stik es kr
Komponen dan persediaan Arduino MKR1000 × 1 Nano Hub Sensor Infineon × 1 LCD Nokia 5110 × 1 Modul Bluetooth HC-05 × 1 Breadboard (generik) × 1 Kabel jumper (generik) × 1 Sakelar Tombol Tekan SparkFun 12mm × 1 Buzzer
Komponen dan persediaan Arduino UNO Salah satu komponen utama. × 1 Sensor Ultrasonik - HC-SR04 (Generik) Salah satu komponen utama. × 1 Baterai Li-Ion 1000mAh Salah satu komponen utama. × 2 Katoda Umum Difusi RGB Salah satu komponen utama. × 1 Buzzer Sala
Komponen dan persediaan Arduino MKR IoT Bundle × 1 Aplikasi dan layanan online Zpier ThingSpeak API Tentang proyek ini Catatan:Tutorial ini mungkin sudah usang, silakan buka di sini untuk versi yang lebih baru. Pendahuluan Seperti yang pernah