Tentang proyek ini
Halo semuanya, ini proyek pertama saya, ThimbleKrox yang merupakan bidal yang memungkinkan Anda mengontrol penunjuk tetikus melalui pergerakan indeks (atau jari apa pun).
Langkah 1:Bahan dan alat yang dibutuhkan
Bahan yang dibutuhkan:
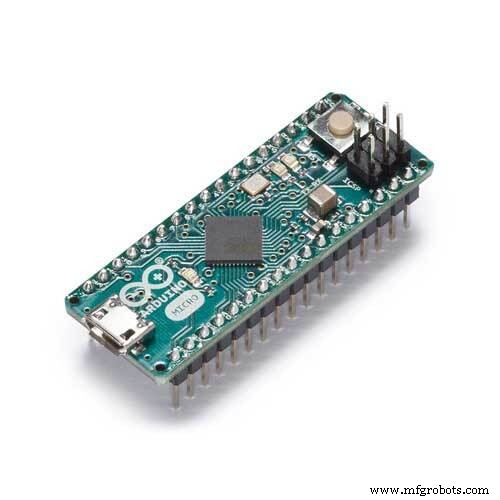
- Arduino Mikro
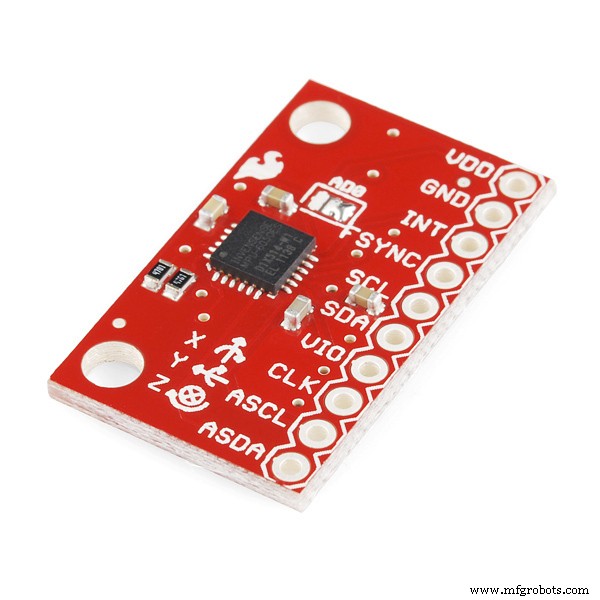
- MPU-6050
- kabel untuk menghubungkan Arduino dan PC (USB mikro ke USB)
- Jumper (untuk menghubungkan Arduino dan MPU-6050)
- elastis (jika Anda ingin memasang Arduino ke tangan Anda)
Alat yang dibutuhkan:
- komputer dengan Arduino IDE terpasang (untuk mem-boot kode di Arduino)
- Setrika solder (hanya jika Arduino belum memasang konektor pin)
- Printer 3D (jika Anda ingin bidal Anda terlihat keren)
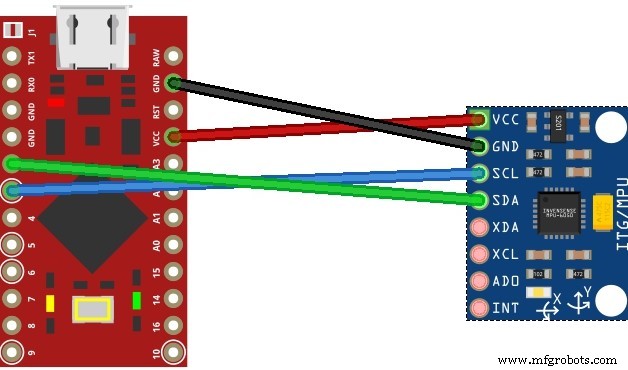
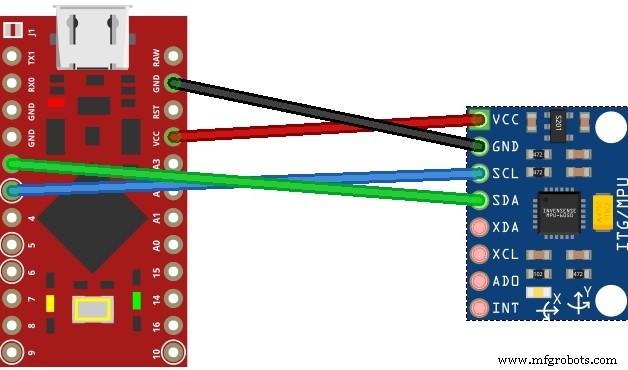
Langkah 2:Koneksi
Hubungkan pin arduino ke pin MPU-6050:
- pin VCC arduino ke pin VCC
- sematkan GND ke GND
- pin 2 ke SDA
- pin 3 ke SCL.
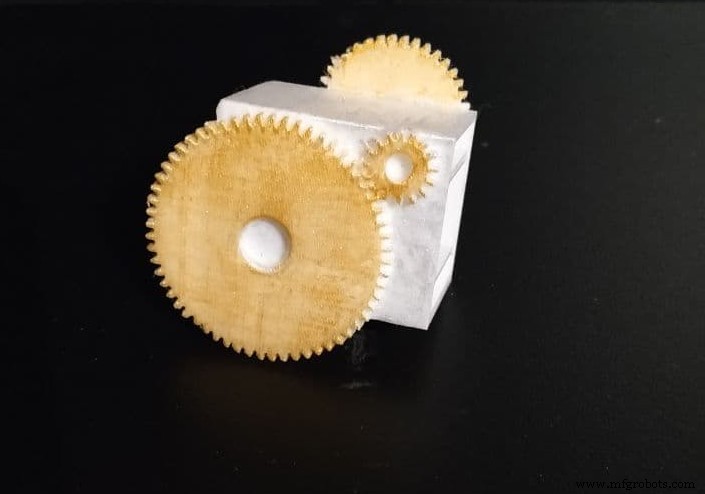
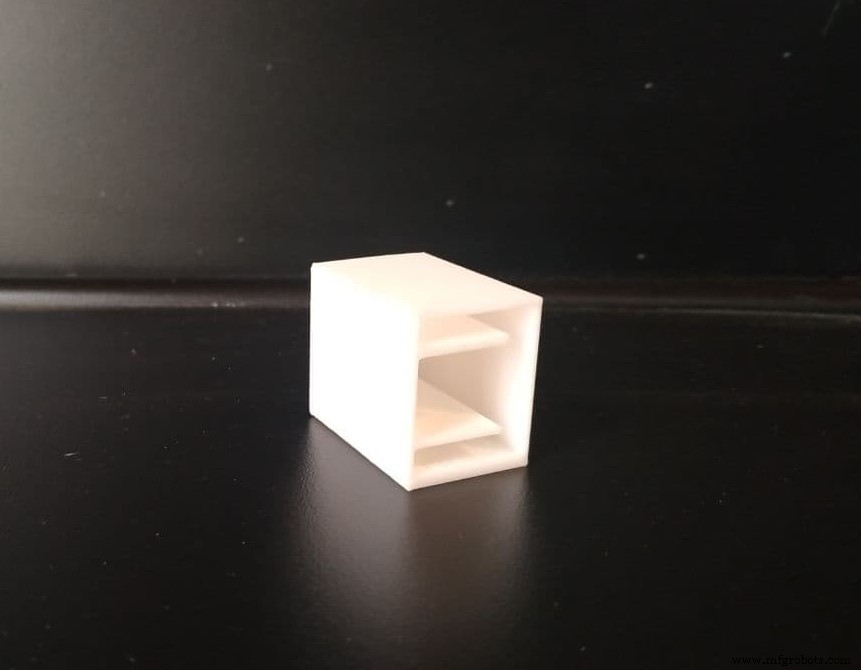
Langkah 3:Pencetakan 3D (opsional)
Jika Anda ingin bidal Anda terlihat bagus, dan jika Anda memiliki printer 3D, Anda dapat mencetak bidal fisik.
Saya melakukannya dalam dua versi, satu jelas yang karenanya tidak memerlukan dukungan untuk dicetak dan tidak terlalu besar, yang kedua sebagai gantinya saya mencoba melakukannya dengan gaya steampunk tanpa membuatnya terlalu besar (masih lebih besar daripada yang jelas one ), tetapi yang ini membutuhkan dukungan untuk dicetak dan hanya menghasilkan yang terbaik jika diwarnai (untuk PLA saya cocok dengan tempera). Keduanya harus dicetak dengan bagian dengan dua tonjolan internal di bagian bawah
Langkah 4:Perakitan
Dengan bidal cetak 3D
Untuk memasang semuanya dengan bidal yang dicetak, setelah membuat sambungan, perlu untuk memasukkan MPU-6050 ke dalam rongga atas bidal yang menampung kabel di rongga bawah
Tanpa bidal cetak 3D
Dalam hal ini, perakitan dilakukan dengan cara yang lebih amatir, yaitu dengan menempatkan MPU-6050 di phalanx terakhir dari jari yang tertarik dan memblokirnya dengan pita perekat atau karet.
Langkah 5:Kode dan Kalibrasi
Hal pertama yang harus dilakukan untuk menjalankan kode adalah menginstal library yang diperlukan yaitu Wire.h, I2Cdev.h, MPU6050.h dan Mouse.h
Setelah melakukan ini saran saya untuk memuat kode kalibrasi ThimbleKrox, pasang bidal dan buka serial monitor (Ctrl + Shift + M).
Anda sekarang akan melihat sesuatu seperti ini:
kanan | gx =3165 gy =469 gz =-1055 | kapak =15232 ay =2064 az =-4496
Di mana ditunjukkan arah di mana, jika dikalibrasi dengan benar, Anda ingin mengarahkan penunjuk dan kemudian beberapa nilai yang diperlukan untuk kalibrasi.
Sekarang Anda harus membuka kembali kode dan pergi ke garis yang ditandai dengan "// garis kalibrasi" dan ubah nilai numerik sampai Anda mendapatkan arah yang benar. (Setiap kali Anda mengubah nilai dalam kode, Anda perlu mengunggahnya kembali ke Arduino)
Mis.
Pemantau serial:
kiri | gx =3165 gy =469 gz =-1055 | kapak =5232 ay =2064 az =-4496
Kode kalibrasi:
if (ax> =15000) { // garis kalibrasi
kanan ();
}
Monitor serial menandai "kiri" tetapi kami ingin baris ini ditandai "kanan" sehingga kami perlu mengubah nilai "15000" menjadi "5000". Ini karena, dalam hal ini, kita harus memastikan bahwa "kapak" yang terdeteksi lebih besar dari nilai dalam kode. Kita maklum harus lebih besar karena di kode ada tanda mayor dan kita harus melihat "kapak" serial monitor karena di kode ada "kapak". (hanya nilai numerik dari kode yang perlu diubah)
Setelah memuat ulang kode di Arduino kita akan memiliki:
Pemantau serial:
kanan | gx =3165 gy =469 gz =-1055 | kapak =5232 ay =2064 az =-4496
Kode kalibrasi:
if (ax> =5000) { // garis kalibrasi
kanan ();
}
Ketika semua garis kalibrasi dalam kode kalibrasi telah disesuaikan dan oleh karena itu bidal versi kalibrasi berfungsi, nilai kode utama harus disesuaikan agar sesuai dengan kode kalibrasi.
Mis.
Kode Kalibrasi:
if (ax> =5000) { // garis kalibrasi
kanan ();
}
Kode utama:
if (ax> =15000) { // garis kalibrasi
kanan ();
}
Kode utama harus diubah menjadi:
if (ax> =5000) { // garis kalibrasi
kanan ();
}
Sekarang saatnya mengupload kode utama
Langkah 6:Selesaikan proyek
Sekarang saatnya untuk memakai bidal Anda dan bermain dengannya!
Kode
- Kode ThimbleKrox
- Kode kalibrasi ThimbleKrox
Kode ThimbleKroxArduino
Kode utama ThimbleKrok//Kode untuk mengontrol penunjuk tetikus melalui gerakan jari//Untuk mengkalibrasi perangkat, jalankan "Kode kalibrasi ThimbleKrox" dan ikuti tutorial yang ada di https://www.hackster.io/projects /dd8881///Garis yang perlu diubah untuk kalibrasi memiliki "//calibration line" //kode ditulis oleh Magform#include #include #include #include MPU6050 mpu;int16_t ax, ay, az, gx, gy, gz;int vx, vy;int sensibility=10; //Ubah nilai ini untuk mengubah sensitivitas perangkat void setup() { Serial.begin(9600); Kawat.mulai(); mpu.initialize(); if (!mpu.testConnection()) { //periksa koneksi dengan MPU-6050, jika tidak ada koneksi berhenti bekerja sementara (1); }}void up(){ Mouse.move(0, -sensibilitas); }void down(){ Mouse.move(0, sensibilitas); }kosongkan kiri(){ Mouse.move(-sensibilitas, 0); }void right(){ Mouse.move(sensibilitas, 0); }void loop() { mpu.getMotion6(&ax, &ay, &az, &gx, &gy, &gz); if(ax>=15000){ //kalibrasi garis kanan(); } if(ax<=-9000){ //kalibrasi garis kiri(); } if(ay<=-8000){ //kalibrasi line up(); } if(ay>=10000){ //kalibrasi garis bawah(); }//batalkan komentar pada baris berikut untuk mengatur klik kanan dengan sprint ke atas dan klik kiri dengan sprint down (Work in progress part)/* if(gy>=20000){ //calibration line Mouse.click(MOUSE_RIGHT); penundaan(100); } if(gy<=-20000){ //garis kalibrasi Mouse.click(MOUSE_LEFT); penundaan(100); }*/delay(10);}
Kode kalibrasi ThimbleKroxArduino
Kode untuk kalibrasi ThimbleKrox//Kode untuk mengkalibrasi ThimbleKrox//Untuk mengkalibrasi perangkat, jalankan kode ini dan ikuti tutorial yang ada di https://www.hackster.io/projects/dd8881///Garis yang diperlukan untuk diubah (sebagai kode lainnya) untuk kalibrasi memiliki "//calibration line" //kode yang ditulis oleh Magform#include #include #include #include MPU6050 mpu;int16_t ax, ay, az, gx, gy, gz;int vx, vy;int Nwrong=1;void setup() { Nwrong=1; Serial.begin(9600); Kawat.mulai(); mpu.initialize(); while(Salah!=0){ if (!mpu.testConnection()) { Serial.print("Nomor koneksi salah:"); Serial.print(Salah); salah++; penundaan (1000); }else{ Salah=0; } }}void up(){ Serial.print(" up "); }void down(){ Serial.print("down"); }kosong kiri(){ Serial.print(" kiri "); }batal kanan(){ Serial.print("kanan"); }void klik kanan(){ Serial.print("Klik Kanan");; }void klik kiri(){ Serial.print("Klik Kiri");; } void loop() { mpu.getMotion6(&ax, &ay, &az, &gx, &gy, &gz); if(ax>=15000){ //kalibrasi garis kanan(); } if(ax<=-9000){ //kalibrasi garis kiri(); } if(ay<=-8000){ //kalibrasi line up(); } if(ay>=10000){ //kalibrasi garis bawah(); }//batalkan komentar pada baris berikut untuk mengatur klik kanan dengan sprint ke atas dan klik kiri dengan sprint down (bagian Work in progress)/* if(gy>=20000){ //calibration line rightclick(); penundaan(100); } if(gy<=-20000){ //garis kalibrasi klik kiri(); penundaan(100); }*/ Serial.print(" | gx="); Serial.print(gx); Serial.print("gi="); Serial.print(gy); Serial.print("gz="); Serial.print(gz); Serial.print(" | kapak="); Serial.print(kapak); Serial.print("ay="); Serial.print(ay); Serial.print("az="); Serial.print(az); Serial.print("\n"); penundaan(5000); }
ThimbleKrox
https://github.com/Magform/ThimbleKrox Suku cadang dan penutup khusus
Model cetak 3D ThimbleKrox
Bagi mereka yang lebih suka mengambil model dari file ThingiverseCAD di thingiverse.com Dukungan diperlukanTidak diperlukan dukungan Skema