Tentang proyek ini
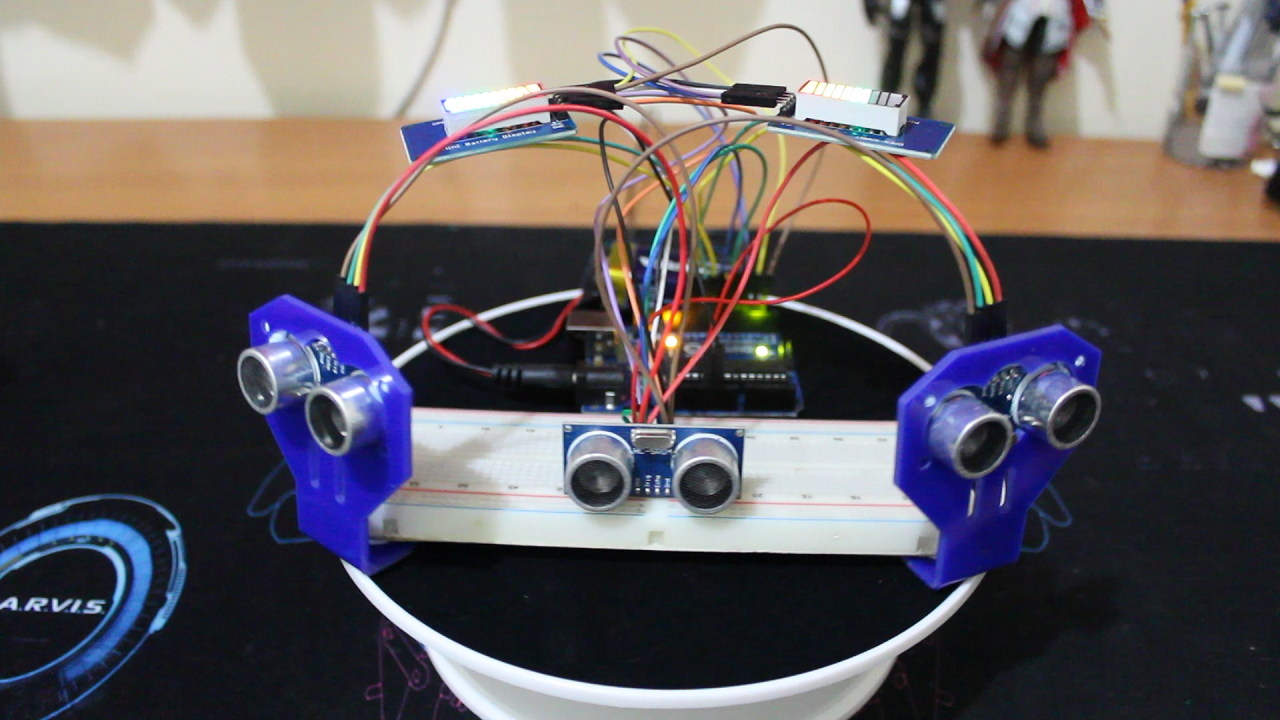
Hai, proyek ini tentang Sensor Radar Parkir DIY, sangat mudah dibuat, didasarkan pada sensor Ultrasound HC SR-04, saya menggunakan 3 di antaranya:Satu untuk setiap sisi dan satu untuk tengah, lalu 2 mini tampilan baterai, yang sebenarnya dibuat untuk menunjukkan kepada Anda status baterai, tetapi di sini saya menggunakannya untuk menunjukkan jarak antara sensor dan rintangan, tergantung sisi mana, juga tergantung pada jarak maksimum yang dapat Anda atur , di atas jarak itu selalu dianggap cukup ruang, di bawah itu tampilan akan berubah tergantung pada jarak dan arahnya.
Bagian
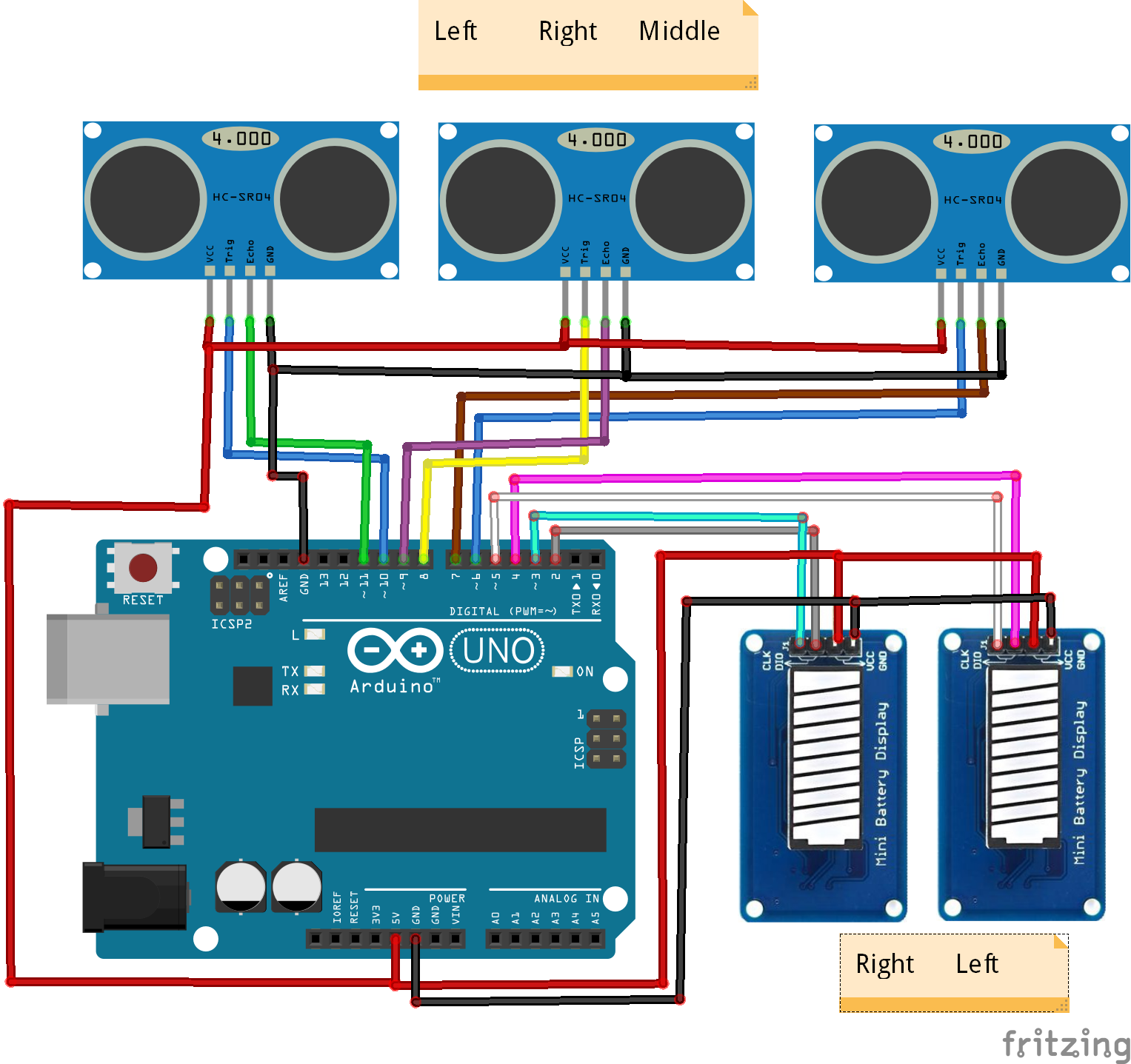
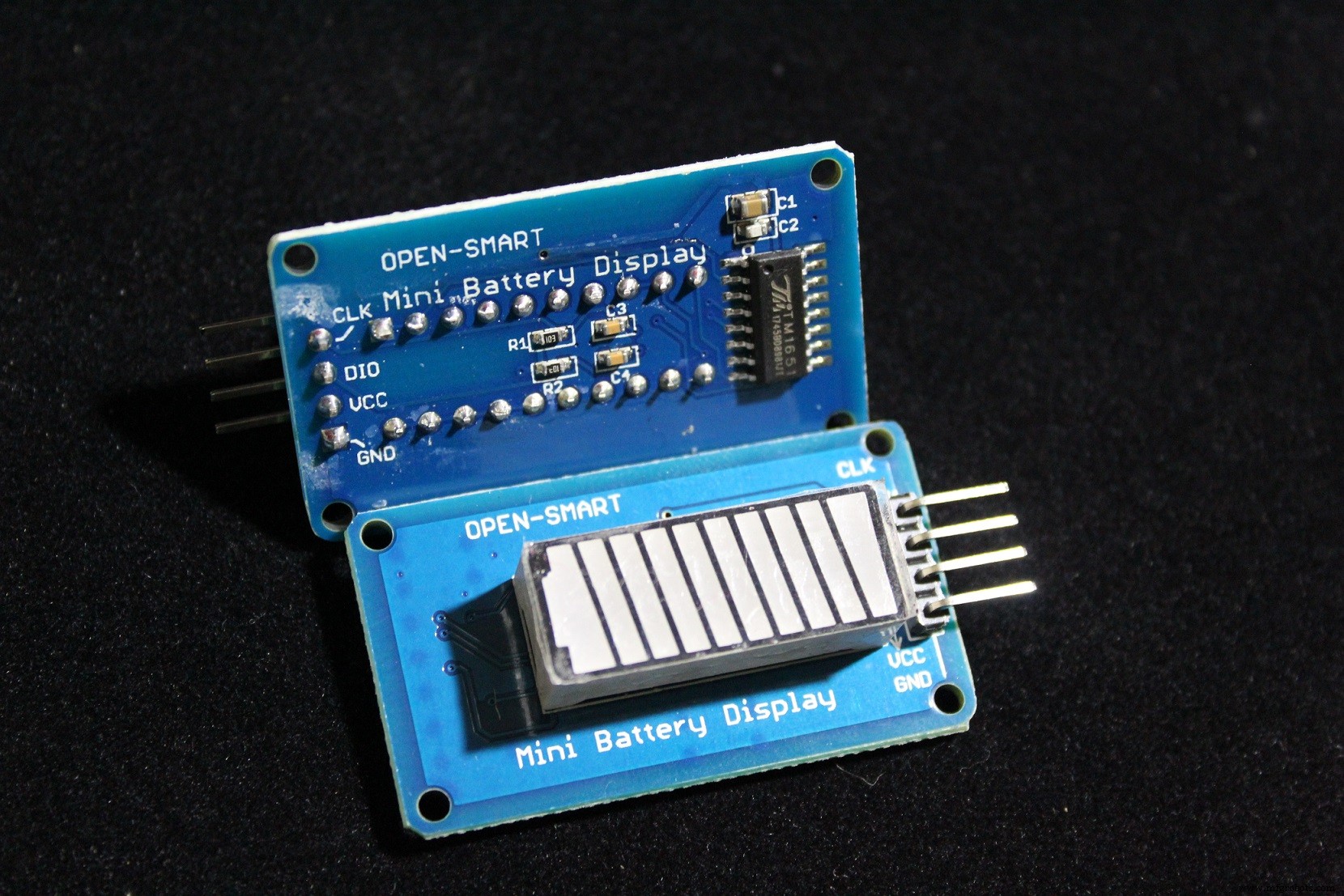
Itu adalah bagian yang saya gunakan, Anda dapat menambahkan beberapa kabel lompat dan papan tempat memotong roti jika Anda mau. (Tampilan baterai didasarkan pada chip TM1651)

Bekerja
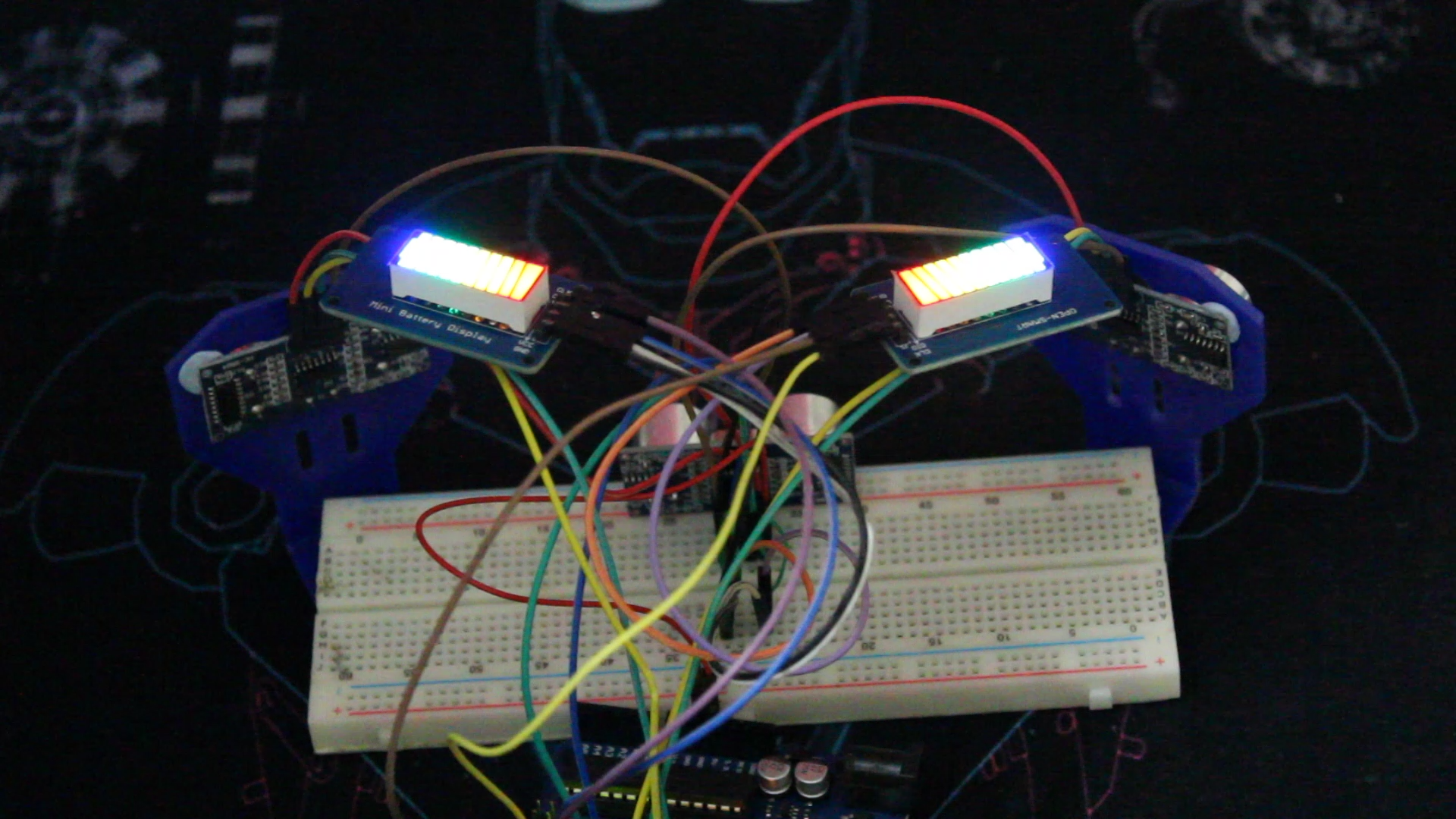
Ada 3 modul ultrasound:Kanan, Tengah dan Kiri, dan dua layar:Kanan dan KIRI. Sensor tengah dapat memengaruhi kedua tampilan, tetapi dua lainnya hanya dapat memengaruhi sisi masing-masing.
Misalnya ada dua rintangan , satu di sisi Kanan dan satu lagi di Tengah, kode akan mengambil yang paling dekat untuk menampilkannya di layar,.
Jika tengah adalah yang terdekat kedua tampilan akan berubah sesuai dengan jaraknya.
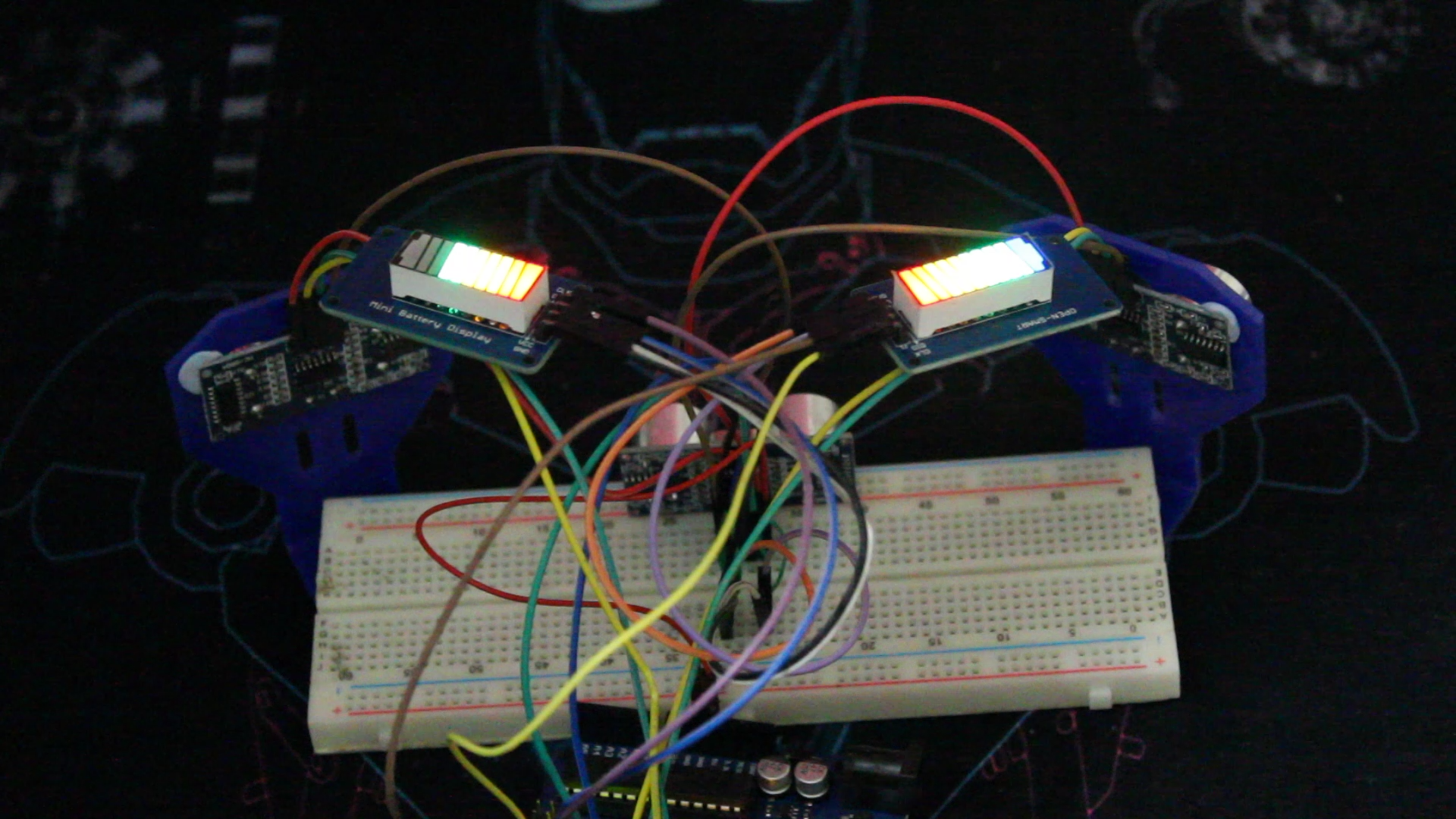
Jika sisi kanan adalah yang terdekat tampilan kanan akan berubah dan lebih rendah dari sisi kiri.
Ada jarak maksimal yang bisa kamu atur dari kode, di atas jarak itu dianggap aman dan layar akan menyala penuh, di bawah jarak itu layar mulai berubah dan sebanding dengan jarak maksimum.
Contoh
Berikut adalah beberapa kasus untuk membuatnya mudah dijelaskan
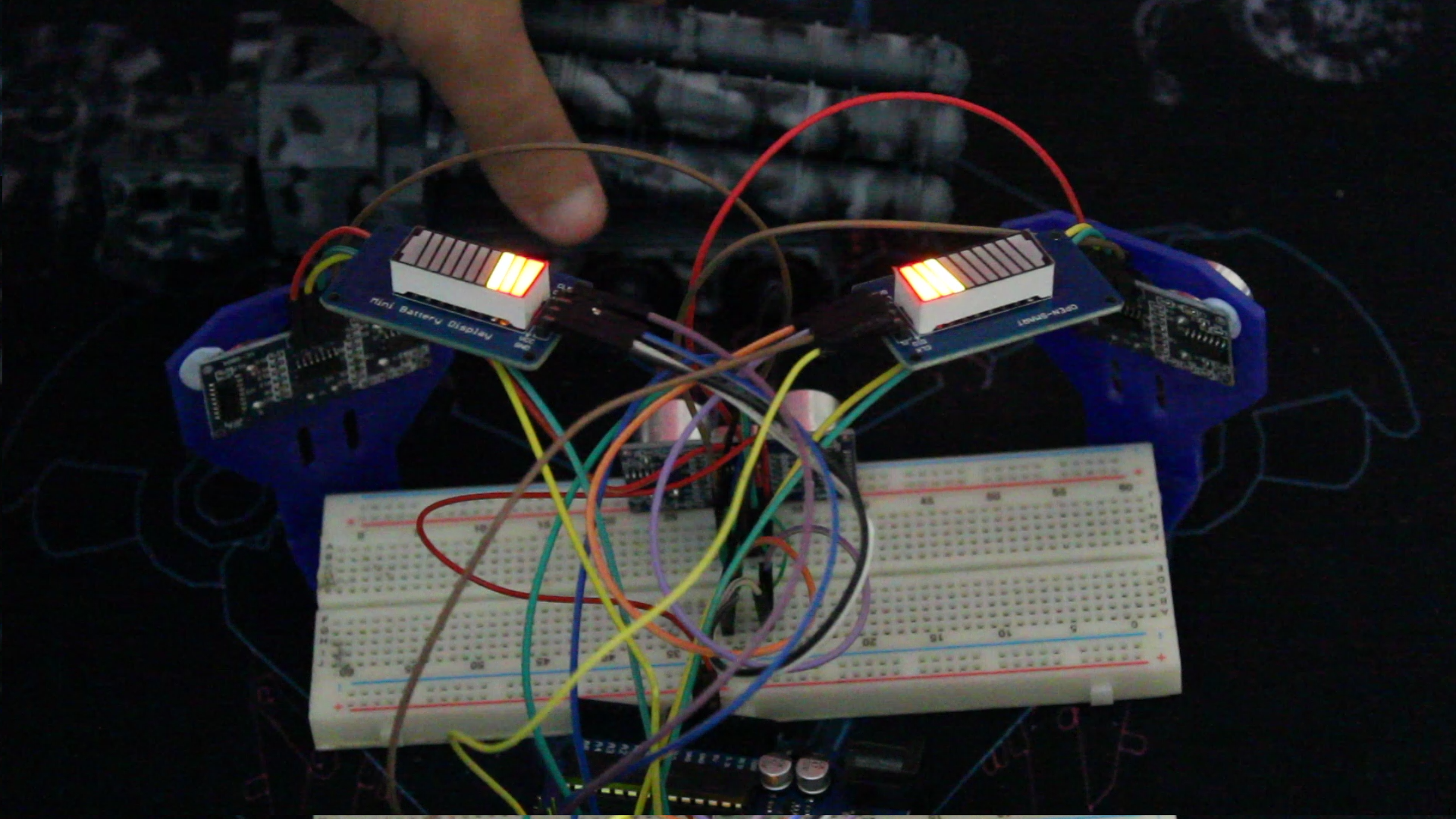
Kasus terakhir bisa terjadi jika Anda memiliki rintangan di tengah dan kanan (kanan lebih dekat) atau di kiri dan kanan (sisi kanan lebih dekat), atau semua sisi tapi (kanan lebih dekat).
Peningkatan:
- Anda dapat menambahkan sensor lain untuk mencakup area yang luas
- Tambahkan layar untuk menunjukkan nilai jarak
- Ubah sensor menjadi yang tahan air seperti JSN SR-04
- Tambahkan suara
Kode
Parking_sensor_v1.inoArduino
/* Kode ini dimaksudkan untuk bekerja dengan modul ultrasound HC-SR04 x3 dan tampilan baterai TM1651 x2 * Proyek ini adalah sensor parkir yang menunjukkan seberapa dekat rintangan dan dari mana * tergantung pada Maxdistance yang di atasnya tampilan akan menunjukkan jarak aman * di bawah ini mulai berubah * Lihat www.SurtrTech.com untuk detail lebih lanjut */#include #define CLK 3 //Pengkabelan tampilan kanan#define DIO 2#define CLK2 5 //Pengkabelan tampilan kiri#define DIO2 4#define trigPin 6 //Pengkabelan modul ultrasound R=Kanan L=Kiri yang lain adalah tengah#define echoPin 7#define trigPinR 8#define echoPinR 9#define trigPinL 10#define echoPinL 11 #define Maxdistance 20 //Durasi maksimum jarak 20cm; int jarak;TM1651 DisplayR(CLK,DIO); //Menampilkan instanceTM1651 DisplayL(CLK2,DIO2);void setup() { pinMode(trigPin, OUTPUT); //Pinmode dari HC-SR04 dan memulai tampilan pinMode(echoPin, INPUT); pinMode(trigPinR, OUTPUT); pinMode(echoPinR, INPUT); pinMode(trigPinL, OUTPUT); pinMode(echoPinL, INPUT); TampilanR.init(); DisplayR.set(TERANG); TampilanL.init(); DisplayL.set(TERANG);}void loop() { int jarakM =CDistance(trigPin,echoPin); //Menghitung semua jarak dengan memanggil fungsi di bawah ini int distanceR =CDistance(trigPinR,echoPinR); int jarakL =CDJarak(trigPinL,echoPinL); int R=min(jarakM,jarakR); //Kita memiliki dua tampilan R dan L, pertama kita ambil jarak minimum antara M/R dan M/L int L=min(jarakM,jarakL); if(R>0 &&R Maxdistance) //Kami aman dan tampilan selalu menunjukkan ada cukup ruang DisplayR.displayLevel (7); if(L>0 &&L Maxdistance) DisplayL.displayLevel(7); delay(50);}int CDistance(int a, int b){ //Menghitung fungsi jarak, dibutuhkan dua argumen (Pemicu dan Gema) dan menjalankan proses biasa dari HC-SR04 digitalWrite(a, LOW); delayMicroseconds(2); digitalWrite(a, TINGGI); delayMicroseconds(10); digitalWrite(a, RENDAH); durasi =pulseIn(b, TINGGI); jarak =durasi*(0.034/2); jarak kembali; //Mengembalikan jarak yang dihitung}
TM1651 Pustaka tampilan baterai
Perpustakaan membuat pekerjaan menjadi sangat mudahhttps://github.com/ne0x/fuel_display Skema