

Teknologi Industri

Manufaktur industri
Ketika seseorang menyebut kata "komputer", perangkat digital adalah yang biasanya muncul di benak. Sirkuit digital mewakili jumlah numerik dalam biner format:pola 1 dan 0 diwakili oleh banyak rangkaian transistor yang beroperasi dalam keadaan jenuh atau terputus. Namun, sirkuit analog juga dapat digunakan untuk mewakili kuantitas numerik dan melakukan perhitungan matematis, dengan menggunakan sinyal tegangan variabel alih-alih status on/off diskrit.
Berikut adalah contoh sederhana representasi biner (digital) versus representasi analog dari angka “dua puluh lima:”
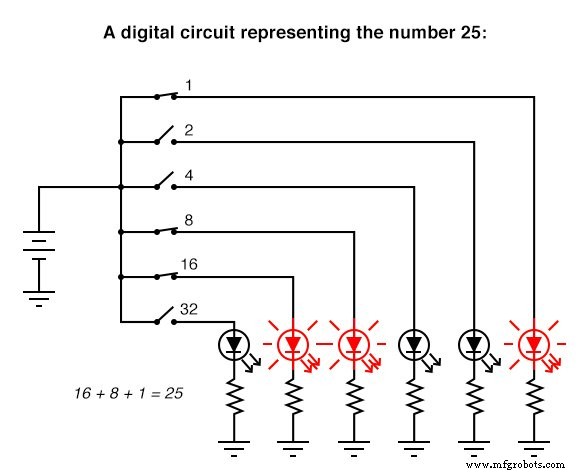
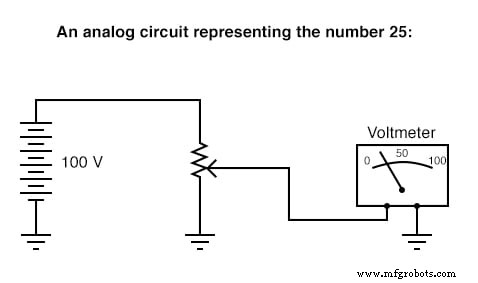
Sirkuit digital sangat berbeda dari sirkuit yang dibangun berdasarkan prinsip analog. Sirkuit komputasi digital bisa sangat kompleks, dan perhitungan harus sering dilakukan dalam "langkah" berurutan untuk mendapatkan jawaban akhir, seperti halnya manusia akan melakukan perhitungan aritmatika dalam langkah-langkah dengan pensil dan kertas. Sirkuit komputasi analog, di sisi lain, cukup sederhana dalam perbandingan, dan melakukan perhitungan mereka secara terus menerus, secara real-time. Ada kerugian menggunakan sirkuit analog untuk mewakili angka, meskipun:ketidaktepatan. Rangkaian digital yang ditunjukkan di atas mewakili angka dua puluh lima, tepatnya. Sirkuit analog yang ditunjukkan di atas mungkin atau mungkin tidak dikalibrasi secara tepat ke 25.000 volt, tetapi dapat mengalami “drift” dan kesalahan.
Dalam aplikasi di mana presisi tidak kritis, sirkuit komputasi analog sangat praktis dan elegan. Berikut ini adalah beberapa rangkaian op-amp untuk melakukan komputasi analog:
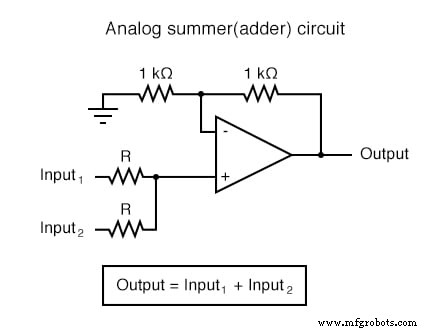
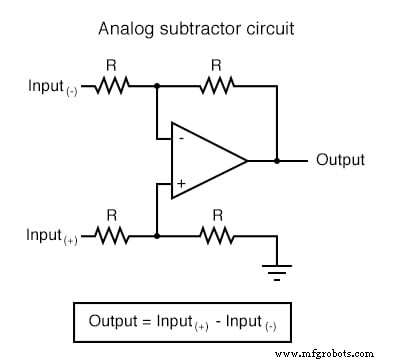
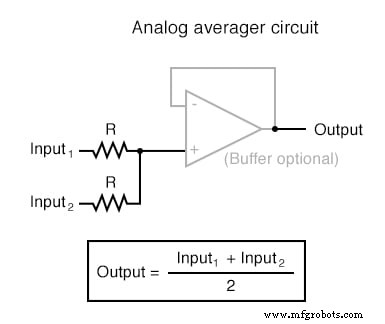
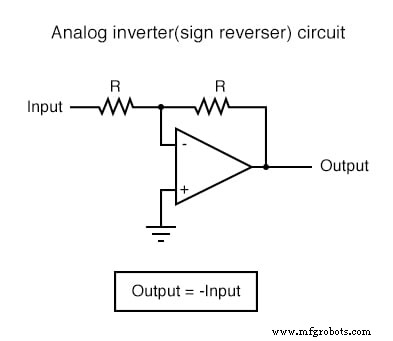
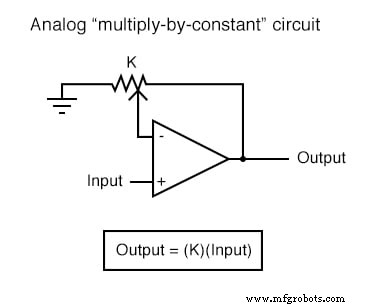
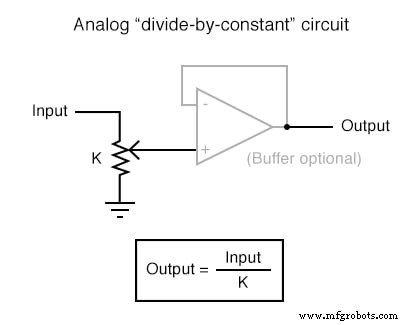
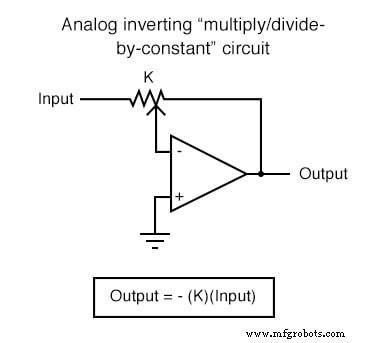
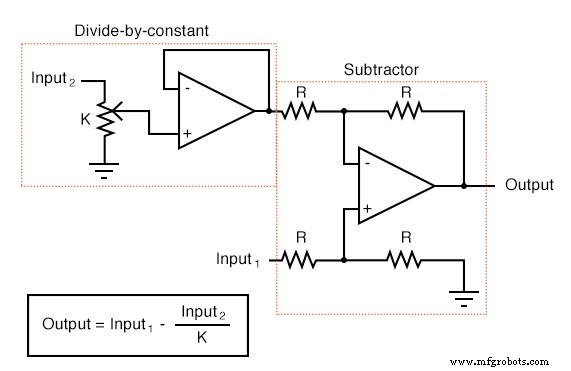
Masing-masing sirkuit ini dapat digunakan secara modular untuk membuat sirkuit yang mampu melakukan banyak perhitungan. Misalnya, kita perlu mengurangi pecahan tertentu dari satu variabel dari variabel lain. Dengan menggabungkan rangkaian bagi-per-konstan dengan rangkaian pengurang, kita dapat memperoleh fungsi yang diperlukan:
Perangkat yang disebut komputer analog dulu umum di universitas dan toko-toko teknik, di mana lusinan sirkuit op-amp dapat "ditambal" bersama dengan kabel jumper yang dapat dilepas untuk memodelkan pernyataan matematika, biasanya untuk tujuan mensimulasikan beberapa proses fisik yang persamaan dasarnya diketahui. Komputer digital telah membuat komputer analog menjadi usang, tetapi sirkuit komputasi analog tidak dapat dikalahkan oleh digital dalam hal keanggunan dan penghematan komponen yang diperlukan.
Sirkuit komputasi analog unggul dalam melakukan operasi kalkulus integrasi dan diferensiasi terhadap waktu, dengan menggunakan kapasitor dalam loop umpan balik op-amp. Namun, untuk sepenuhnya memahami operasi dan aplikasi rangkaian ini, pertama-tama kita harus memahami arti dari konsep kalkulus dasar ini. Untungnya, penerapan sirkuit op-amp untuk masalah dunia nyata yang melibatkan kalkulus berfungsi sebagai sarana yang sangat baik untuk mengajarkan kalkulus dasar. Dalam kata-kata John I. Smith, diambil dari buku teksnya yang luar biasa, Desain Sirkuit Operasional Modern :
“Sebuah catatan dorongan ditawarkan kepada pembaca tertentu:kalkulus integral adalah salah satu disiplin matematika yang dieksploitasi oleh sirkuit [penguat] operasional dan, dalam prosesnya, agak dihancurkan sebagai penghalang untuk memahami.” (hal. 4)
Sentimen Mr. Smith tentang nilai pedagogis sirkuit analog sebagai alat pembelajaran matematika tidaklah unik. Pertimbangkan pendapat insinyur George Fox Lang, dalam sebuah artikel yang dia tulis untuk jurnal Sound and Vibration edisi Agustus 2000 , berjudul, “Analog adalah tidak Merek Dagang Komputer!”:
“Membuat entitas fisik nyata (sirkuit) yang diatur oleh serangkaian persamaan tertentu dan berinteraksi dengannya memberikan wawasan unik ke dalam pernyataan matematika tersebut. Tidak ada cara yang lebih baik untuk mengembangkan "firasat" untuk interaksi antara fisika dan matematika daripada mengalami interaksi semacam itu. Komputer analog adalah alat pengajaran interdisipliner yang kuat; keusangannya disesalkan oleh banyak pendidik di berbagai bidang.” (hal. 23)
Diferensiasi adalah operasi pertama yang biasanya dipelajari oleh siswa kalkulus pemula. Sederhananya, diferensiasi adalah menentukan tingkat perubahan sesaat dari satu variabel yang berkaitan dengan yang lain. Dalam rangkaian pembeda analog, variabel bebasnya adalah waktu, sehingga laju perubahan yang kita hadapi adalah laju perubahan sinyal elektronik (tegangan atau arus) terhadap waktu.
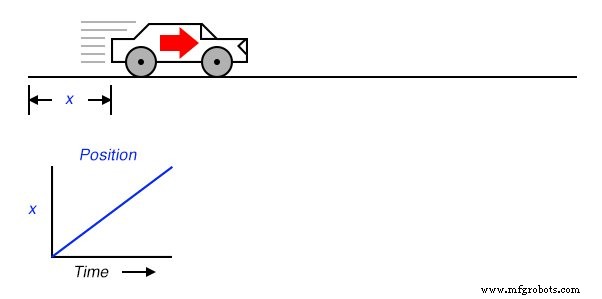
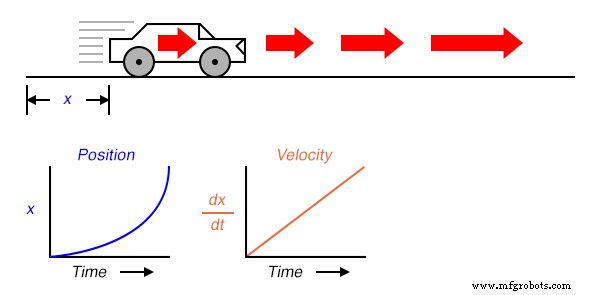
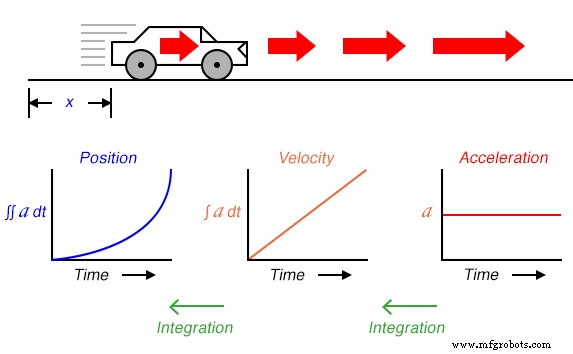
Misalkan kita mengukur posisi sebuah mobil, berjalan di jalur langsung (tidak berbelok), dari titik awalnya. Mari kita sebut pengukuran ini, x . Jika mobil bergerak dengan kecepatan sedemikian rupa sehingga jaraknya dari "mulai" meningkat terus dari waktu ke waktu, posisinya akan diplot pada grafik sebagai linier fungsi (garis lurus):
Jika kita menghitung turunan posisi mobil terhadap waktu (yaitu, tentukan laju perubahan posisi mobil terhadap waktu), kita akan sampai pada besaran yang mewakili kecepatan mobil. Fungsi diferensiasi diwakili oleh notasi pecahan d/d , jadi ketika membedakan posisi (x ) terhadap waktu (t ), kami menyatakan hasil (turunan) sebagai dx/dt :
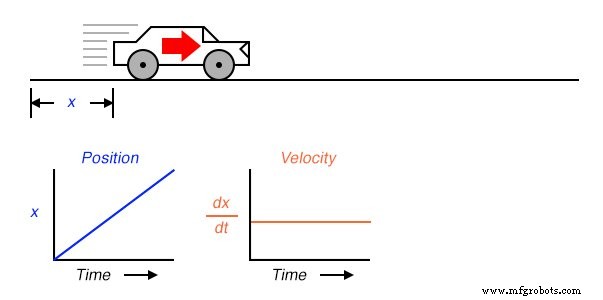
Untuk grafik linier x dari waktu ke waktu, turunan posisi (dx/dt ), sebaliknya dan lebih dikenal sebagai kecepatan , akan menjadi garis datar, tidak berubah nilainya. Turunan dari fungsi matematika dapat dipahami secara grafis sebagai kemiringan ketika diplot pada grafik, dan di sini kita dapat melihat bahwa posisi (x ) grafik memiliki kemiringan konstan, yang berarti turunannya (dx/dt ) harus konstan sepanjang waktu.
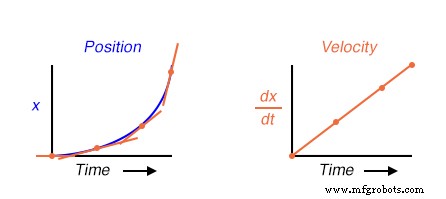
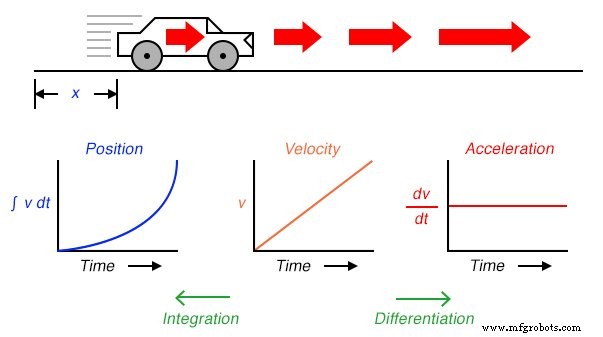
Sekarang, misalkan jarak yang ditempuh oleh mobil meningkat secara eksponensial dari waktu ke waktu:yaitu, ia memulai perjalanannya dengan gerakan lambat, tetapi menempuh jarak yang lebih jauh dengan setiap periode waktu yang lewat. Kita kemudian akan melihat bahwa turunan dari posisi (dx/dt ), atau dikenal sebagai kecepatan (v ), tidak akan konstan dari waktu ke waktu, tetapi akan meningkat:
Ketinggian titik pada grafik kecepatan sesuai dengan tingkat perubahan, atau kemiringan, titik pada waktu yang sesuai pada grafik posisi:
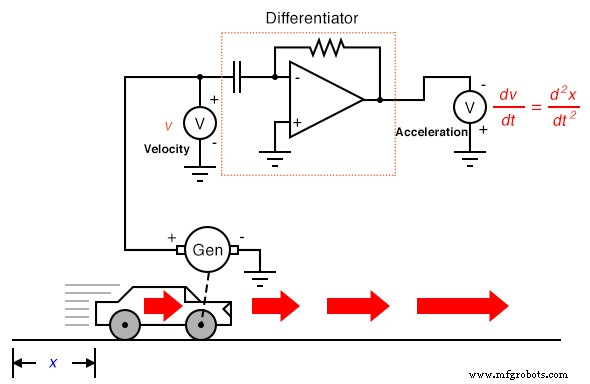
Apa hubungannya dengan sirkuit elektronik analog? Nah, jika kita memiliki sinyal tegangan analog yang mewakili posisi mobil (bayangkan potensiometer besar yang wipernya terpasang ke mobil, menghasilkan tegangan yang sebanding dengan posisi mobil), kita dapat menghubungkan rangkaian pembeda ke sinyal ini dan memiliki sirkuit terus menerus menghitung kecepatan mobil, menampilkan hasilnya melalui voltmeter yang terhubung ke output rangkaian pembeda:
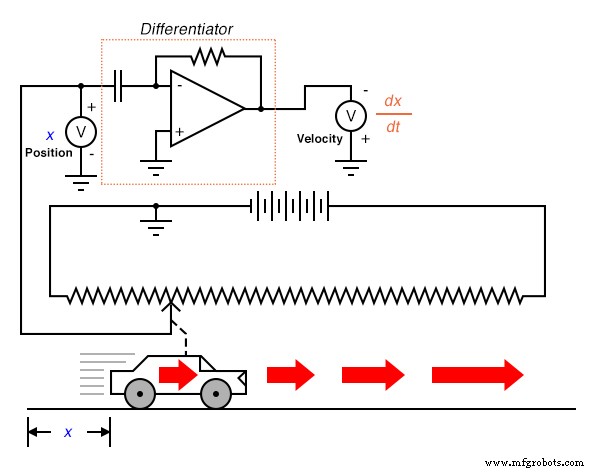
Ingat dari bab terakhir bahwa rangkaian pembeda menghasilkan tegangan yang sebanding dengan laju perubahan dari waktu ke waktu tegangan input (h/t ). Jadi, jika tegangan input berubah dari waktu ke waktu pada laju yang konstan , tegangan keluaran akan berada pada nilai konstan. Jika mobil bergerak sedemikian rupa sehingga jarak tempuhnya dari waktu ke waktu bertambah dengan kecepatan tetap, maka itu berarti mobil bergerak dengan kecepatan konstan, dan rangkaian pembeda akan menghasilkan tegangan konstan yang sebanding dengan kecepatan itu. Jika jarak tempuh mobil dari waktu ke waktu berubah dengan cara yang tidak tetap, keluaran rangkaian pembeda juga akan menjadi tidak tetap, tetapi selalu pada tingkat yang mewakili laju perubahan masukan dari waktu ke waktu.
Perhatikan bahwa kecepatan register voltmeter (pada keluaran rangkaian pembeda) dihubungkan dalam polaritas “terbalik” ke keluaran op-amp. Ini karena rangkaian pembeda yang ditampilkan adalah pembalik :keluaran tegangan negatif untuk laju perubahan tegangan masukan positif. Jika kita ingin voltmeter mencatat nilai positif untuk kecepatan, voltmeter harus dihubungkan ke op-amp seperti yang ditunjukkan. Meskipun mungkin tidak praktis untuk menghubungkan potensiometer raksasa ke objek bergerak seperti mobil, konsepnya harus jelas:dengan melakukan fungsi kalkulus diferensiasi secara elektronik pada sinyal yang mewakili posisi, kita memperoleh sinyal yang mewakili kecepatan.
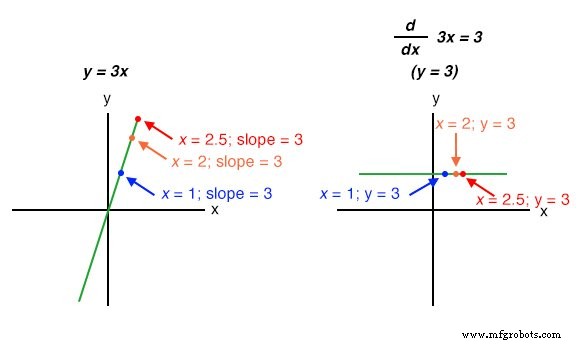
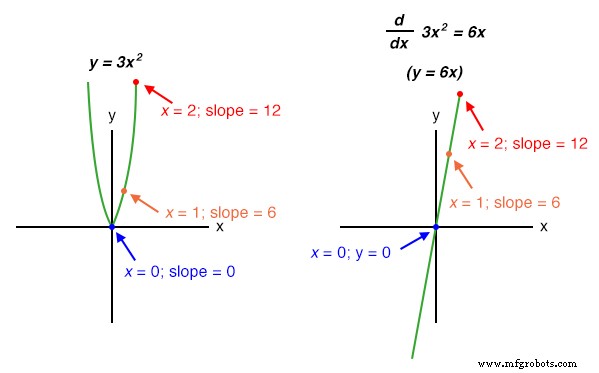
Siswa kalkulus pemula mempelajari teknik simbolis untuk diferensiasi. Namun, ini mengharuskan persamaan yang menggambarkan grafik asli diketahui. Misalnya, siswa kalkulus mempelajari cara mengambil fungsi seperti y =3x dan temukan turunannya terhadap x (h/dx ), 3 , hanya dengan memanipulasi persamaan. Kami dapat memverifikasi keakuratan manipulasi ini dengan membandingkan grafik dari dua fungsi:
Fungsi nonlinier seperti y =3x 2 juga dapat dibedakan dengan cara simbolis. Dalam hal ini, turunan dari y =3x 2 sehubungan dengan x adalah 6x :
Namun, dalam kehidupan nyata, kita sering tidak dapat menggambarkan perilaku peristiwa fisik apa pun dengan persamaan sederhana seperti y =3x , dan diferensiasi simbolis dari jenis yang dipelajari oleh siswa kalkulus mungkin tidak mungkin untuk diterapkan pada pengukuran fisik. Jika seseorang ingin menentukan turunan dari posisi mobil hipotetis kita (dx/dt =kecepatan) dengan cara simbolis, pertama-tama mereka harus mendapatkan persamaan yang menggambarkan posisi mobil dari waktu ke waktu, berdasarkan pengukuran posisi yang diambil dari eksperimen nyata—tugas yang hampir mustahil kecuali mobil dioperasikan di bawah kondisi yang dikontrol dengan hati-hati yang mengarah ke sangat sederhana grafik posisi. Namun, rangkaian diferensial analog, dengan memanfaatkan perilaku kapasitor terhadap tegangan, arus, dan waktu i =C(dv/dt) , secara alami membedakan sinyal nyata apa pun dalam kaitannya dengan waktu, dan akan mampu mengeluarkan sinyal yang sesuai dengan kecepatan sesaat (dx/dt ) setiap saat. Dengan mencatat sinyal posisi mobil bersama dengan sinyal keluaran pembeda menggunakan perekam grafik atau perangkat akuisisi data lainnya, kedua grafik secara alami akan muncul untuk diperiksa dan dianalisis.
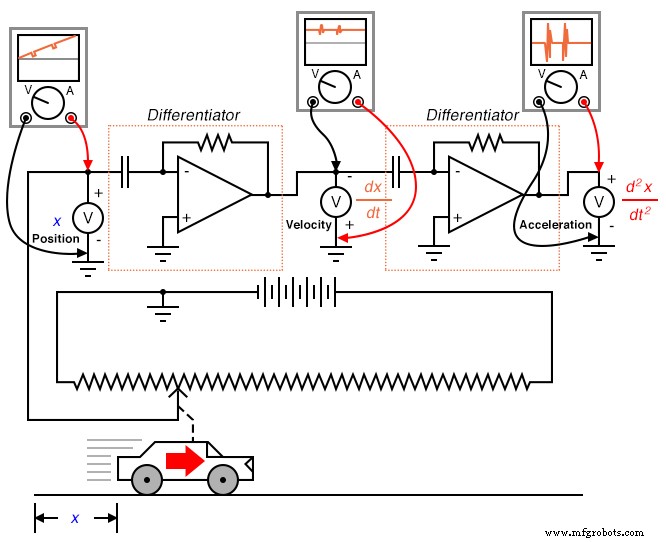
Kita dapat mengambil prinsip diferensiasi satu langkah lebih jauh dengan menerapkannya pada sinyal kecepatan menggunakan rangkaian pembeda lain. Dengan kata lain, gunakan untuk menghitung laju perubahan kecepatan, yang kita ketahui adalah laju perubahan posisi. Tindakan praktis apa yang akan kita dapatkan jika kita melakukan ini? Pikirkan ini dalam hal unit yang kita gunakan untuk mengukur posisi dan kecepatan. Jika kita mengukur posisi mobil dari titik awalnya dalam mil, maka kita mungkin akan menyatakan kecepatannya dalam satuan mil per jam (dx/dt ). Jika kita membedakan kecepatan (diukur dalam mil per jam) terhadap waktu, kita akan mendapatkan satuan mil per jam per jam . Kelas pengantar fisika mengajarkan siswa tentang perilaku benda jatuh, mengukur posisi dalam meter , kecepatan dalam meter per detik , dan perubahan kecepatan dari waktu ke waktu dalam meter per detik, per detik . Langkah terakhir ini disebut percepatan :laju perubahan kecepatan terhadap waktu:
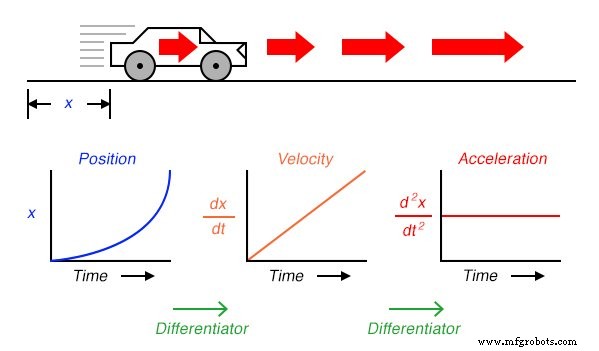
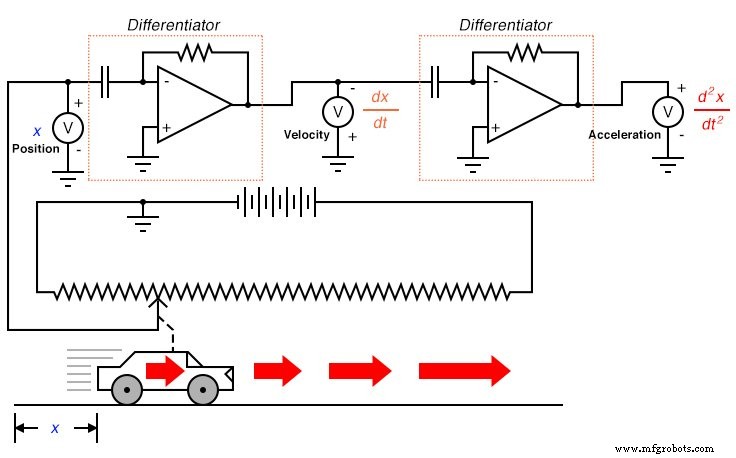
Ekspresi d 2 x/dt 2 disebut turunan kedua posisi (x ) sehubungan dengan waktu (t ). Jika kita menghubungkan rangkaian pembeda kedua ke keluaran yang pertama, voltmeter terakhir akan mencatat percepatan:
Berasal dari kecepatan dari posisi, dan percepatan dari kecepatan, kita melihat prinsip diferensiasi diilustrasikan dengan sangat jelas. Ini bukan satu-satunya pengukuran fisik yang terkait satu sama lain dengan cara ini, tetapi mungkin ini yang paling umum. Contoh lain dari kalkulus dalam aksi adalah hubungan antara aliran cairan (q ) dan volume cairan (v ) terakumulasi dalam wadah dari waktu ke waktu:
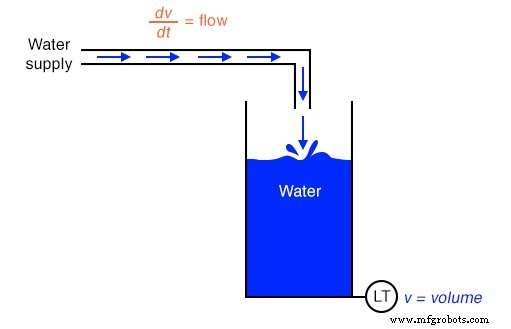
Perangkat “Pemancar Level” yang dipasang pada tangki penyimpanan air memberikan sinyal yang berbanding lurus dengan ketinggian air di dalam tangki, yang—jika tangki memiliki luas penampang konstan sepanjang ketinggiannya—secara langsung menyamakan volume air yang disimpan. Jika kita mengambil sinyal volume ini dan membedakannya terhadap waktu (dv/dt ), kita akan mendapatkan sinyal yang sebanding dengan laju aliran air melalui pipa yang membawa air ke tangki. Sirkuit pembeda yang terhubung sedemikian rupa untuk menerima sinyal volume ini akan menghasilkan sinyal output yang sebanding dengan aliran, mungkin menggantikan perangkat pengukur aliran (“Flow Transmitter”) yang dipasang di pipa.
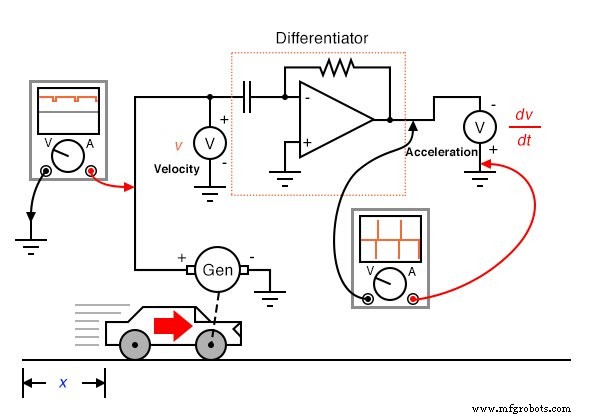
Kembali ke eksperimen mobil, misalkan mobil hipotetis kita dilengkapi dengan tachogenerator di salah satu roda, menghasilkan sinyal tegangan yang berbanding lurus dengan kecepatan. Kita bisa membedakan sinyal untuk mendapatkan percepatan dengan satu rangkaian, seperti ini:
Sesuai sifatnya, tachogenerator membedakan posisi mobil terhadap waktu, menghasilkan tegangan yang sebanding dengan seberapa cepat posisi sudut roda berubah dari waktu ke waktu. Ini memberi kita sinyal mentah yang sudah mewakili kecepatan, dengan hanya satu langkah diferensiasi yang diperlukan untuk mendapatkan sinyal percepatan. Sebuah tachogenerator mengukur kecepatan, tentu saja, adalah contoh yang jauh lebih praktis dari instrumentasi mobil daripada potensiometer raksasa yang mengukur posisi fisiknya, tetapi apa yang kita peroleh dalam kepraktisan kita kehilangan dalam pengukuran posisi. Tidak peduli berapa kali kita membedakan, kita tidak akan pernah bisa menyimpulkan posisi mobil dari sinyal kecepatan. Jika proses diferensiasi membawa kita dari posisi ke kecepatan ke percepatan, maka entah bagaimana kita perlu melakukan proses diferensiasi "terbalik" untuk beralih dari kecepatan ke posisi. Proses matematika seperti itu memang ada, dan ini disebut integrasi . Sirkuit "integrator" dapat digunakan untuk melakukan fungsi integrasi ini terhadap waktu:
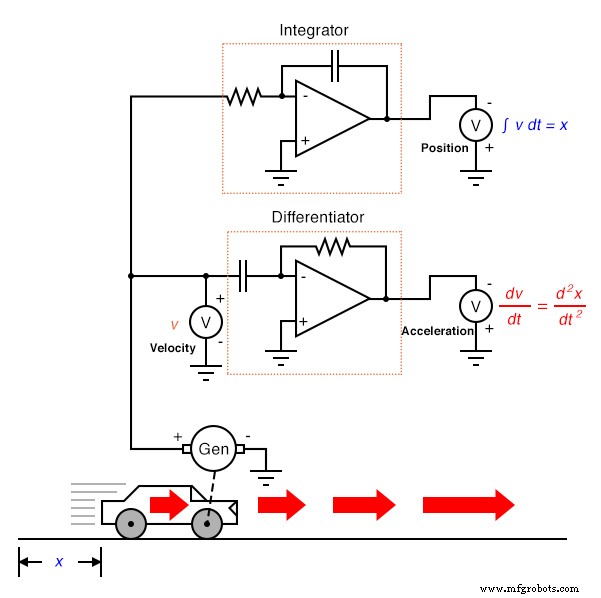
Ingat dari bab terakhir bahwa rangkaian integrator menghasilkan tegangan yang laju perubahannya dari waktu ke waktu sebanding dengan besarnya tegangan input. Jadi, dengan tegangan input yang konstan, tegangan output akan berubah dengan laju constant yang konstan . Jika mobil bergerak dengan kecepatan konstan (tegangan konstan masuk ke sirkuit integrator dari tachogenerator), maka jarak yang ditempuh akan meningkat terus seiring berjalannya waktu, dan integrator akan mengeluarkan tegangan yang terus berubah sebanding dengan jarak itu. Jika kecepatan mobil tidak konstan, maka laju perubahan dari waktu ke waktu juga tidak akan menjadi keluaran rangkaian integrator, tetapi tegangan keluaran akan dengan tepat mewakili jumlah jarak yang ditempuh oleh mobil pada suatu titik waktu tertentu.
Simbol untuk integrasi terlihat seperti huruf kursif yang sangat sempit “S” (∫). Persamaan yang menggunakan simbol ini (∫v dt =x ) memberitahu kita bahwa kita mengintegrasikan kecepatan (v ) terhadap waktu (dt ), dan mendapatkan posisi (x ) sebagai hasilnya.
Jadi, kita dapat menyatakan tiga ukuran gerak mobil (posisi, kecepatan, dan percepatan) dalam bentuk kecepatan (v ) semudah mungkin dalam hal posisi (x ):
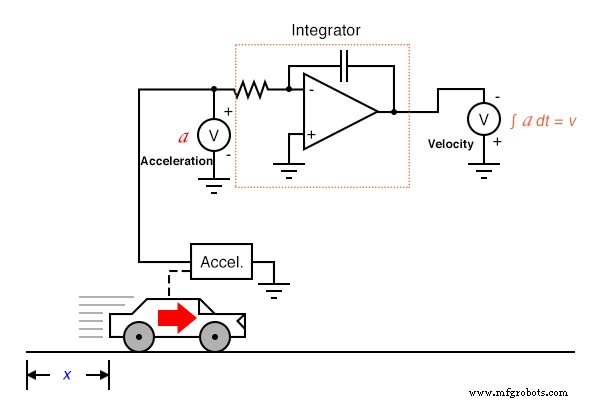
Jika kita memiliki akselerometer yang terpasang pada mobil, menghasilkan sinyal yang sebanding dengan laju akselerasi atau deselerasi, kita dapat (secara hipotetis) memperoleh sinyal kecepatan dengan satu langkah integrasi, dan sinyal posisi dengan integrasi langkah kedua:
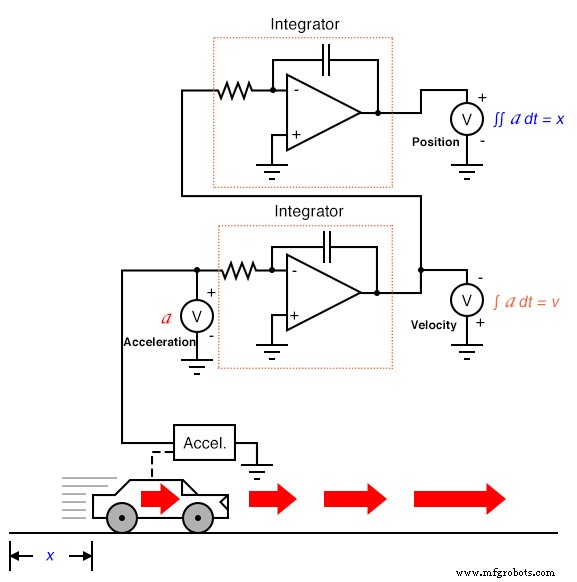
Jadi, ketiga ukuran gerak mobil (posisi, kecepatan, dan percepatan) dapat dinyatakan dalam percepatan:
Seperti yang mungkin Anda duga, proses integrasi dapat diilustrasikan, dan diterapkan pada, sistem fisik lainnya juga. Ambil contoh tangki penyimpanan air dan contoh aliran yang ditunjukkan sebelumnya. Jika laju aliran adalah turunan volume tangki terhadap waktu (q =dv/dt ), maka kita juga dapat mengatakan bahwa volume adalah integral laju aliran terhadap waktu:
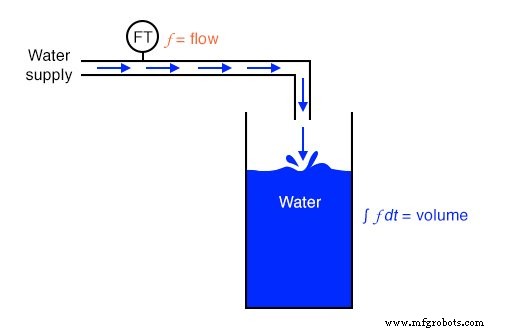
Jika kita menggunakan alat “Pemancar Aliran” untuk mengukur aliran air, maka dengan integrasi waktu kita dapat menghitung volume air yang terakumulasi dalam tangki dari waktu ke waktu. Meskipun secara teori dimungkinkan untuk menggunakan rangkaian integrator op-amp kapasitif untuk memperoleh sinyal volume dari sinyal aliran, perangkat "integrator" elektronik mekanis dan digital lebih cocok untuk integrasi dalam jangka waktu yang lama, dan sering digunakan di dalam air. industri pengolahan dan distribusi.
Sama seperti ada teknik simbolis untuk diferensiasi, ada juga teknik simbolis untuk integrasi, meskipun cenderung lebih kompleks dan bervariasi. Menerapkan integrasi simbolis ke masalah dunia nyata seperti akselerasi mobil, bagaimanapun, masih bergantung pada ketersediaan persamaan yang secara tepat menggambarkan sinyal yang diukur—sering kali merupakan hal yang sulit atau tidak mungkin untuk diturunkan dari data yang diukur. Namun, sirkuit integrator elektronik menjalankan fungsi matematika ini secara terus-menerus, dalam waktu nyata, dan untuk setiap profil sinyal input, sehingga menyediakan alat yang ampuh bagi para ilmuwan dan insinyur.
Karena itu, ada peringatan untuk menggunakan teknik kalkulus untuk menurunkan satu jenis pengukuran dari yang lain. Diferensiasi memiliki kecenderungan yang tidak diinginkan untuk memperkuat "kebisingan" yang ditemukan dalam variabel yang diukur, karena kebisingan biasanya akan muncul sebagai frekuensi yang jauh lebih tinggi daripada variabel yang diukur, dan frekuensi tinggi pada dasarnya memiliki tingkat perubahan yang tinggi dari waktu ke waktu.
Untuk mengilustrasikan masalah ini, misalkan kita menurunkan pengukuran akselerasi mobil dari sinyal kecepatan yang diperoleh dari tachogenerator dengan sikat aus atau batang komutator. Titik kontak yang buruk antara sikat dan komutator akan menghasilkan "penurunan" sesaat pada tegangan keluaran tachogenerator, dan rangkaian pembeda yang terhubung dengannya akan menafsirkan penurunan ini sebagai perubahan kecepatan yang sangat cepat. Untuk mobil yang bergerak dengan kecepatan konstan—tidak akselerasi atau deselerasi—sinyal akselerasi harus 0 volt, tetapi “noise” pada sinyal kecepatan yang disebabkan oleh tachogenerator yang rusak akan menyebabkan sinyal (percepatan) yang berbeda mengandung “paku”, yang menunjukkan secara salah periode singkat akselerasi dan deselerasi tinggi:
Tegangan noise yang ada dalam sinyal yang akan dibedakan tidak perlu amplitudo yang signifikan untuk menyebabkan masalah:semua yang diperlukan adalah profil noise memiliki waktu naik atau turun yang cepat. Dengan kata lain, kebisingan listrik dengan dv/dt tinggi komponen akan bermasalah saat dibedakan, meskipun amplitudonya rendah.
Perlu dicatat bahwa masalah ini bukanlah artefak (kesalahan idiosinkratik dari instrumen pengukuran/komputasi) dari sirkuit analog; melainkan, itu melekat pada proses diferensiasi. Tidak peduli bagaimana kita melakukan diferensiasi, "noise" dalam sinyal kecepatan akan selalu merusak sinyal output. Tentu saja, jika kita membedakan sinyal dua kali, seperti yang kita lakukan untuk mendapatkan kecepatan dan percepatan dari sinyal posisi, keluaran sinyal noise yang diperkuat oleh rangkaian diferensiator pertama akan diperkuat lagi oleh diferensiator berikutnya, sehingga menambah masalah:
Integrasi tidak mengalami masalah ini, karena integrator bertindak sebagai filter lolos rendah, melemahkan sinyal input frekuensi tinggi. Akibatnya, semua puncak tinggi dan rendah yang dihasilkan dari kebisingan pada sinyal menjadi rata-rata bersama dari waktu ke waktu, untuk hasil bersih yang berkurang. Orang mungkin mengira, kemudian, bahwa kita dapat menghindari semua masalah dengan mengukur percepatan secara langsung dan mengintegrasikan sinyal itu untuk memperoleh kecepatan; sebenarnya, menghitung secara “terbalik” dari cara yang ditunjukkan sebelumnya:
Sayangnya, mengikuti metodologi ini mungkin membawa kita ke kesulitan lain, salah satunya adalah artefak umum dari sirkuit integrator analog yang dikenal sebagai drift . Semua op-amp memiliki sejumlah arus bias input, dan arus ini akan cenderung menyebabkan muatan terakumulasi pada kapasitor selain muatan apa pun yang terakumulasi sebagai akibat dari sinyal tegangan input. Dengan kata lain, semua rangkaian integrator analog mengalami kecenderungan tegangan keluarannya "melayang" atau "merangkak" bahkan ketika sama sekali tidak ada masukan tegangan, akibatnya kesalahan terakumulasi dari waktu ke waktu. Juga, kapasitor yang tidak sempurna akan cenderung kehilangan muatan yang tersimpan dari waktu ke waktu karena hambatan internal, menghasilkan "melayang" menuju tegangan keluaran nol. Masalah ini adalah artefak sirkuit analog, dan dapat dihilangkan melalui penggunaan komputasi digital.
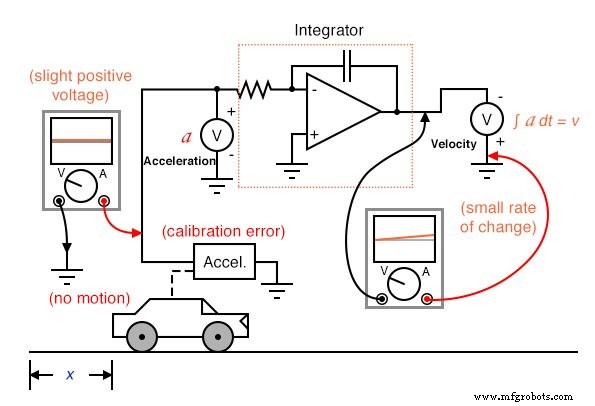
Terlepas dari artefak sirkuit, kemungkinan kesalahan dapat terjadi dari integrasi satu pengukuran (seperti percepatan) untuk mendapatkan yang lain (seperti kecepatan) hanya karena cara kerja integrasi. Jika titik kalibrasi "nol" dari sensor sinyal mentah tidak sempurna, ia akan mengeluarkan sedikit sinyal positif atau negatif bahkan dalam kondisi yang seharusnya tidak menghasilkan apa-apa. Pertimbangkan sebuah mobil dengan akselerometer yang dikalibrasi tidak sempurna, atau yang dipengaruhi oleh gravitasi untuk mendeteksi sedikit percepatan yang tidak terkait dengan gerakan mobil. Bahkan dengan komputer yang terintegrasi sempurna, kesalahan sensor ini akan menyebabkan integrator menumpuk kesalahan, menghasilkan sinyal keluaran yang menunjukkan perubahan kecepatan saat mobil tidak berakselerasi atau melambat.
Seperti halnya diferensiasi, kesalahan ini juga akan bertambah jika sinyal terintegrasi diteruskan ke sirkuit integrator lain, karena output "melayang" dari integrator pertama akan segera memberikan sinyal positif atau negatif yang signifikan untuk integrasi integrator berikutnya. Oleh karena itu, harus berhati-hati saat mengintegrasikan sinyal sensor:jika penyetelan sensor “nol” tidak sempurna , hasil terintegrasi akan melayang, bahkan jika rangkaian integrator itu sendiri sempurna.
Sejauh ini, satu-satunya kesalahan integrasi yang dibahas bersifat buatan:berasal dari ketidaksempurnaan dalam sirkuit dan sensor. Ada juga sumber kesalahan yang melekat pada proses integrasi itu sendiri, dan itu adalah konstanta tidak diketahui masalah. Siswa kalkulus pemula belajar bahwa setiap kali suatu fungsi terintegrasi, terdapat konstanta yang tidak diketahui (biasanya direpresentasikan sebagai variabel C ) ditambahkan ke hasil. Ketidakpastian ini paling mudah dipahami dengan membandingkan turunan dari beberapa fungsi yang berbeda hanya dengan penambahan nilai konstan:
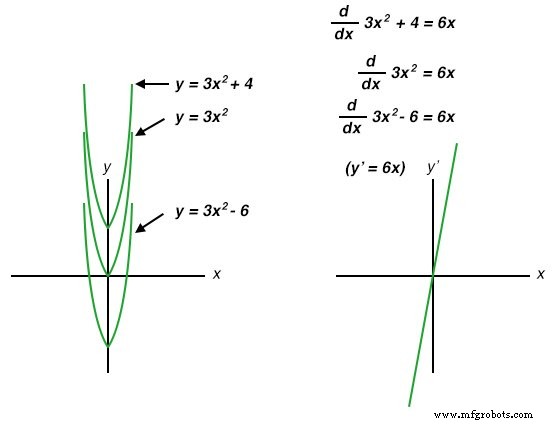
Perhatikan bagaimana masing-masing kurva parabola (y =3x 2 + C ) memiliki bentuk yang sama persis, berbeda satu sama lain dalam hal offset vertikal. Namun, mereka semua memiliki fungsi turunan yang sama persis:y’ =(d/dx)( 3x 2 + C) =6x , karena semuanya memiliki tingkat perubahan yang identik (lereng) pada titik yang sesuai di sepanjang x sumbu. Meskipun hal ini tampak wajar dan diharapkan dari perspektif diferensiasi (persamaan yang berbeda berbagi turunan yang sama), biasanya siswa pemula menganggapnya aneh dari perspektif integrasi, karena ada beberapa jawaban yang benar untuk integral suatu fungsi. Beralih dari persamaan ke turunannya, hanya ada satu jawaban, tetapi beralih dari turunan itu kembali ke persamaan semula membawa kita ke serangkaian solusi yang benar. Untuk menghormati ketidakpastian ini, fungsi simbolis dari integrasi disebut integral tak tentu .
Ketika integrator melakukan integrasi sinyal langsung terhadap waktu, outputnya adalah jumlah dari sinyal input terintegrasi dari waktu ke waktu dan nilai awal yang besarnya sewenang-wenang, yang mewakili keluaran integrator yang sudah ada sebelumnya pada saat integrasi dimulai. Misalnya, jika saya mengintegrasikan kecepatan mobil yang melaju dalam garis lurus menjauhi kota, menghitung bahwa kecepatan konstan 50 mil per jam selama 2 jam akan menghasilkan jarak (∫v dt ) dari 100 mil, itu tidak berarti mobil akan menempuh jarak 100 mil dari kota setelah 2 jam. Semua itu memberitahu kita bahwa mobil akan berada 100 mil lebih jauh jauh dari kota setelah 2 jam berkendara. Jarak sebenarnya dari kota setelah 2 jam berkendara tergantung pada seberapa jauh mobil dari kota saat integrasi dimulai. Jika kita tidak mengetahui nilai awal jarak ini, kita tidak dapat menentukan jarak pasti mobil dari kota setelah 2 jam perjalanan.
Masalah yang sama muncul ketika kita mengintegrasikan percepatan terhadap waktu untuk mendapatkan kecepatan:
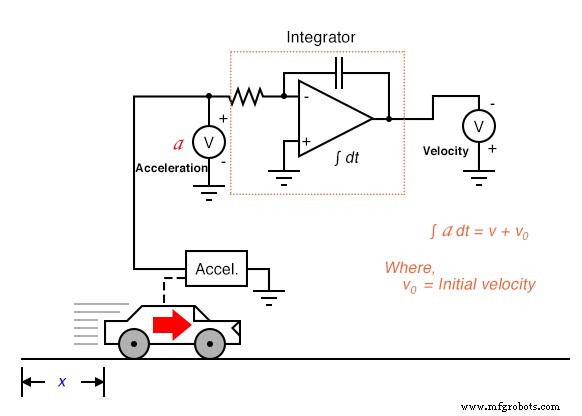
Dalam sistem integrator ini, perhitungan kecepatan mobil hanya akan valid jika rangkaian integrator diinisialisasi ke nilai keluaran nol ketika mobil diam (v =0). Jika tidak, integrator dapat mengeluarkan sinyal bukan-nol untuk kecepatan (v0 ) ketika mobil diam, karena akselerometer tidak dapat membedakan antara keadaan diam (0 mil per jam) dan keadaan kecepatan konstan (katakanlah, 60 mil per jam, tidak berubah). Ketidakpastian dalam keluaran integrator ini melekat pada proses integrasi, dan bukan merupakan artefak dari sirkuit atau sensor.
Singkatnya, jika akurasi maksimum diinginkan untuk pengukuran fisik apa pun, yang terbaik adalah mengukur variabel itu secara langsung daripada menghitungnya dari pengukuran lain. Ini bukan untuk mengatakan bahwa perhitungan itu tidak berharga. Justru sebaliknya, seringkali itu adalah satu-satunya cara praktis untuk mendapatkan pengukuran yang diinginkan. Namun, batas komputasi harus dipahami dan dihormati agar pengukuran yang tepat dapat diperoleh.
LEMBAR KERJA TERKAIT:
Teknologi Industri
Apa yang kita lakukan jika kita menemukan rangkaian yang lebih kompleks daripada konfigurasi seri sederhana yang telah kita lihat sejauh ini? Ambil rangkaian ini sebagai contoh: Rumus konstanta waktu sederhana (τ =RC) didasarkan pada resistansi seri sederhana yang terhubung ke kapasitor. Untu
Mari kita ambil komponen yang sama untuk rangkaian contoh seri kita dan hubungkan secara paralel: Sirkuit RL paralel. Karena sumber daya memiliki frekuensi yang sama dengan rangkaian contoh seri, dan resistor dan induktor keduanya memiliki nilai resistansi dan induktansi yang sama, masing-ma
Karena tiga fase sering digunakan untuk sistem distribusi daya, masuk akal jika kita memerlukan transformator tiga fase untuk dapat menaikkan atau menurunkan tegangan. Ini hanya sebagian yang benar, karena transformator fase tunggal biasa dapat disatukan untuk mengubah daya antara dua sistem tiga f
Seperti yang kita lihat dengan rangkaian pengukuran DC, konfigurasi rangkaian dikenal sebagai jembatan bisa menjadi cara yang sangat berguna untuk mengukur nilai resistansi yang tidak diketahui. Hal ini juga berlaku untuk AC, dan kita dapat menerapkan prinsip yang sama untuk pengukuran akurat dari