Motor Sinkron
Motor Sinkron Satu Fasa
Motor sinkron fase tunggal tersedia dalam ukuran kecil untuk aplikasi yang membutuhkan pengaturan waktu yang tepat seperti penunjuk waktu, (jam) dan pemutar kaset. Meskipun jam teregulasi kuarsa bertenaga baterai tersedia secara luas, variasi yang dioperasikan saluran AC memiliki akurasi jangka panjang yang lebih baik—selama beberapa bulan.
Hal ini disebabkan operator pembangkit listrik sengaja menjaga akurasi frekuensi sistem distribusi AC dalam jangka panjang. Jika tertinggal beberapa siklus, mereka akan membuat siklus AC yang hilang sehingga jam tidak kehilangan waktu.
Motor Sinkron Besar vs. Kecil
Di atas 10 Horsepower (10 kW), efisiensi yang lebih tinggi dan faktor daya terdepan membuat motor sinkron besar berguna dalam industri. Motor sinkron besar beberapa persen lebih efisien daripada motor induksi yang lebih umum, meskipun motor sinkron lebih kompleks.
Karena motor dan generator memiliki konstruksi yang serupa, maka generator dapat digunakan sebagai motor, dan sebaliknya, menggunakan motor sebagai generator.
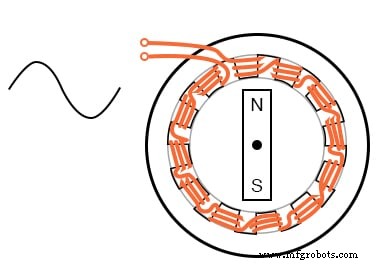
Motor asinkron mirip dengan alternator dengan medan putar. Gambar di bawah menunjukkan alternator kecil dengan medan putar magnet permanen. Gambar di bawah ini dapat berupa dua alternator paralel dan sinkron yang digerakkan oleh sumber energi mekanik, atau alternator yang menggerakkan motor sinkron. Atau, bisa jadi dua motor, jika sumber daya eksternal dihubungkan.
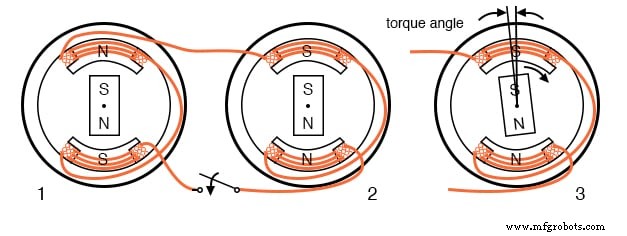
Intinya adalah bahwa dalam kedua kasus tersebut, rotor harus bekerja pada frekuensi nominal yang sama, dan berada dalam fase satu sama lain. Artinya, mereka harus disinkronkan . Prosedur sinkronisasi dua alternator adalah dengan (1) membuka sakelar, (2) menggerakkan kedua alternator pada kecepatan putaran yang sama, (3) memajukan atau memperlambat fase satu unit hingga kedua output AC sefasa, (4) menutup saklar sebelum mereka keluar dari fase.
Setelah disinkronkan, alternator akan terkunci satu sama lain, membutuhkan torsi yang cukup besar untuk melepaskan satu unit (tidak sinkron) dari unit lainnya.
Motor sinkron berjalan selangkah dengan alternator
Menghitung Torsi dengan Motor Sinkron
Jika lebih banyak torsi dalam arah rotasi diterapkan pada rotor dari salah satu alternator yang berputar di atas, sudut rotor akan maju (berlawanan dengan (3)) sehubungan dengan medan magnet dalam kumparan stator saat masih sinkron dan rotor akan mengirimkan energi ke saluran AC seperti alternator.
Rotor juga akan maju sehubungan dengan rotor di alternator lainnya. Jika beban seperti rem diterapkan ke salah satu unit di atas, sudut rotor akan tertinggal dari medan stator seperti pada (3), mengekstraksi energi dari saluran AC, seperti motor.
Jika torsi atau tarikan berlebihan diterapkan, rotor akan melebihi sudut torsi maksimum maju atau tertinggal sedemikian rupa sehingga sinkronisasi hilang. Torsi dikembangkan hanya jika sinkronisasi motor dipertahankan.
Meningkatkan Kecepatan Motor Sinkron
Dalam kasus motor sinkron kecil sebagai pengganti alternator, tidak perlu melalui prosedur sinkronisasi yang rumit untuk alternator. Namun, motor sinkron tidak dapat hidup sendiri dan masih harus dinaikkan ke perkiraan kecepatan listrik alternator sebelum akan mengunci (sinkronisasi) dengan kecepatan putaran generator.
Setelah mencapai kecepatan, motor sinkron akan mempertahankan sinkronisasi dengan sumber daya AC dan mengembangkan torsi.
Sinewave menggerakkan motor sinkron
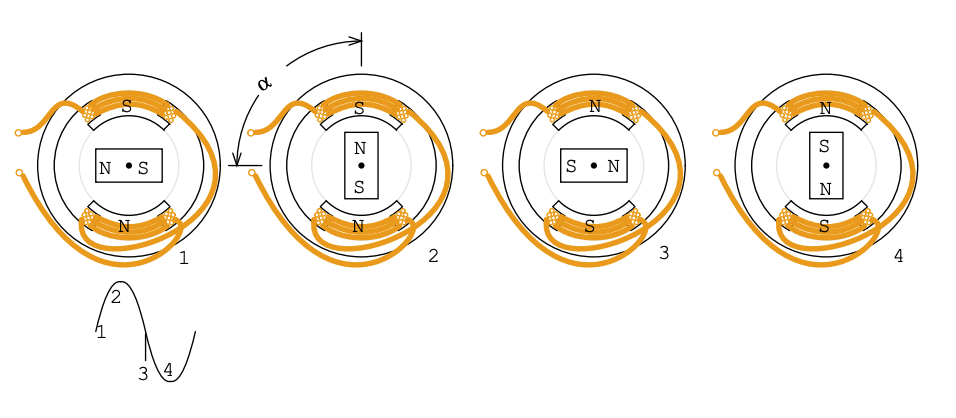
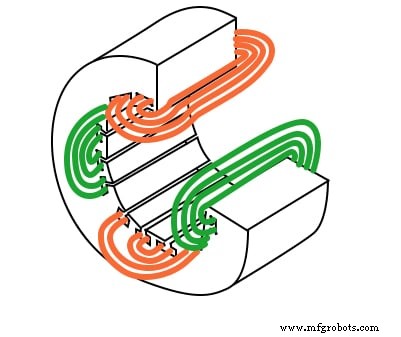
Dengan asumsi bahwa motor mencapai kecepatan sinkron, ketika gelombang sinus berubah menjadi positif pada Gambar di atas (1), kumparan utara bawah mendorong kutub rotor utara, sedangkan kumparan selatan atas menarik kutub utara rotor itu. Dengan cara yang sama, kutub selatan rotor ditolak oleh kumparan selatan atas dan ditarik ke kumparan utara bawah.
Pada saat gelombang sinus mencapai puncak pada (2), torsi yang menahan kutub utara rotor ke atas adalah maksimum. Torsi ini berkurang saat gelombang sinus berkurang menjadi 0 VDC pada (3) dengan torsi minimum.
Saat gelombang sinus berubah menjadi negatif antara (3&4), kumparan selatan bawah mendorong kutub rotor selatan, sambil menarik kutub rotor utara. Dengan cara yang sama, kutub rotor utara ditolak oleh kumparan utara atas dan ditarik ke kumparan selatan bawah. Pada (4) gelombang sinus mencapai puncak negatif dengan menahan torsi lagi pada maksimum. Saat gelombang sinus berubah dari negatif ke 0 VDC menjadi positif, proses berulang untuk siklus gelombang sinus baru.
Perhatikan, gambar di atas menggambarkan posisi rotor untuk kondisi tanpa beban (α=0°). Dalam prakteknya, pembebanan pada rotor akan menyebabkan rotor tertinggal pada posisi yang ditunjukkan oleh sudut . Sudut ini meningkat dengan pembebanan hingga torsi motor maksimum tercapai pada =90°.
Sinkronisasi dan torsi hilang di luar sudut ini. Arus dalam kumparan motor sinkron fase tunggal berdenyut saat polaritas bolak-balik.
Jika kecepatan rotor magnet permanen dekat dengan frekuensi pergantian ini, itu disinkronkan dengan pergantian ini. Karena medan kumparan berdenyut dan tidak berputar, maka rotor magnet permanen perlu dinaikkan kecepatannya dengan motor bantu. Ini adalah motor induksi kecil yang mirip dengan yang ada di bagian selanjutnya.
Penambahan tiang medan mengurangi kecepatan
Sebuah alternator 2 kutub (sepasang kutub N-S) akan menghasilkan gelombang sinus 60 Hz ketika diputar pada 3600 rpm (putaran per menit). 3600 rpm sesuai dengan 60 putaran per detik. Motor sinkron magnet permanen 2 kutub yang serupa juga akan berputar pada 3600 rpm.
Motor dengan kecepatan lebih rendah dapat dibuat dengan menambahkan lebih banyak pasangan kutub. Sebuah motor 4 kutub akan berputar pada 1800 rpm, motor 12 kutub pada 600 rpm. Gaya konstruksi yang ditunjukkan (Gambar di atas) adalah untuk ilustrasi. Efisiensi lebih tinggi, motor sinkron stator multi-kutub torsi tinggi sebenarnya memiliki banyak kutub di rotor.

Motor sinkron 12 kutub satu lilitan
Daripada memutar 12 kumparan untuk motor 12 tiang, gulung kumparan tunggal dengan dua belas potongan tiang baja interdigitasi seperti yang ditunjukkan pada Gambar di atas. Meskipun polaritas kumparan bergantian karena AC yang diterapkan, asumsikan bahwa bagian atas sementara utara, bagian bawah selatan.
Potongan kutub mengarahkan fluks selatan dari bawah dan di luar kumparan ke atas. 6-selatan ini disisipkan dengan tab 6-utara yang ditekuk dari atas potongan tiang baja kumparan. Dengan demikian, batang rotor magnet permanen akan menghadapi pasangan 6 kutub yang sesuai dengan 6 siklus AC dalam satu putaran fisik magnet batang.
Kecepatan putaran akan menjadi 1/6 dari kecepatan listrik AC. Kecepatan rotor akan menjadi 1/6 dari yang dialami dengan motor sinkron 2 kutub. Contoh:60 Hz akan memutar motor 2 kutub pada 3600 rpm, atau 600 rpm untuk motor 12 kutub.
Dicetak ulang atas izin Westclox History di www.clockHistory.com
Stator (Gambar di atas) menunjukkan motor jam sinkron Westclox 12 kutub. Konstruksinya mirip dengan gambar sebelumnya dengan koil tunggal. Gaya konstruksi satu kumparan ekonomis untuk motor torsi rendah. Motor 600 rpm ini menggerakkan roda gigi reduksi yang menggerakkan jarum jam.
T: Jika motor Westclox dijalankan pada 600 rpm dari sumber daya 50 Hz, berapa banyak kutub yang diperlukan?
J: Sebuah motor 10 kutub akan memiliki 5 pasang kutub N-S. Itu akan berputar pada 50/5 =10 putaran per detik atau 600 rpm (10 s-1 x 60 s/menit).

Dicetak ulang atas izin Westclox History di www.clockHistory.com
Rotor (Gambar di atas) terdiri dari batang magnet permanen dan cangkir motor induksi baja. Bilah motor sinkron yang berputar di dalam tab kutub menjaga waktu yang akurat. Cangkir motor induksi di luar magnet batang pas di luar dan di atas tab untuk memulai sendiri. Pada suatu waktu motor yang tidak dapat hidup sendiri tanpa cangkir motor induksi diproduksi.
Motor Sinkron 3-Fase
Motor sinkron 3 fasa seperti yang ditunjukkan pada gambar di bawah ini menghasilkan medan putar listrik di stator. Motor tersebut tidak dapat memulai sendiri jika dimulai dari sumber daya frekuensi tetap seperti 50 atau 60 Hz seperti yang ditemukan dalam pengaturan industri.
Selanjutnya, rotor bukanlah magnet permanen untuk motor multi-tenaga kuda (multi-kilowatt) yang digunakan dalam industri, tetapi elektromagnet. Motor sinkron industri besar lebih efisien daripada motor induksi. Mereka digunakan ketika kecepatan konstan diperlukan. Memiliki faktor daya terdepan, mereka dapat memperbaiki saluran AC untuk faktor daya yang tertinggal.
Tiga fase eksitasi stator ditambahkan secara vektor untuk menghasilkan medan magnet resultan tunggal yang berputar f/2n kali per detik, di mana f adalah frekuensi saluran listrik, 50 atau 60 Hz untuk motor yang dioperasikan saluran listrik industri. Jumlah kutub adalah n. Untuk kecepatan rotor dalam rpm, kalikan dengan 60.
S =f120/n dimana:S =kecepatan rotor dalam rpm f =Frekuensi saluran AC n =jumlah kutub per fasa
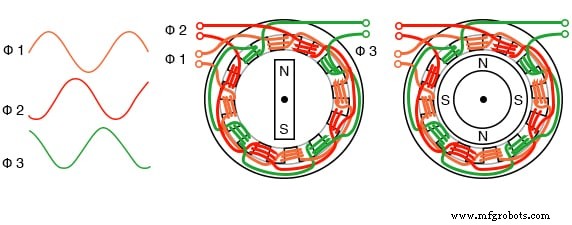
Motor sinkron 3 fasa 4 kutub (per fasa) akan berputar pada 1800 rpm dengan daya 60 Hz atau 1500 rpm dengan daya 50 Hz. Jika kumparan diberi energi satu per satu dalam urutan -1, -2, -3, rotor harus menunjuk ke kutub yang sesuai secara bergantian.
Karena gelombang sinus sebenarnya tumpang tindih, bidang yang dihasilkan akan berputar, tidak secara bertahap, tetapi dengan lancar. Misalnya, ketika gelombang sinus -1 dan -2 bertepatan, medan akan berada di puncak yang menunjuk di antara kutub-kutub ini. Rotor magnet batang yang ditampilkan hanya cocok untuk motor kecil.
Rotor dengan banyak kutub magnet (kanan bawah) digunakan pada motor yang efisien yang menggerakkan beban besar. Ini akan menjadi elektromagnet yang diberi makan cincin slip di motor industri besar. Motor sinkron industri besar dimulai sendiri oleh konduktor sangkar tupai tertanam di angker, bertindak sebagai motor induksi.
Armature elektromagnetik hanya diberi energi setelah rotor dinaikkan mendekati kecepatan sinkron.
Motor sinkron tiga fase, 4 kutub
Motor Sinkron Multi-Fase Kecil
Motor sinkron multi-fase kecil dapat dimulai dengan meningkatkan frekuensi penggerak dari nol ke frekuensi akhir yang berjalan. Sinyal penggerak multi-fase dihasilkan oleh sirkuit elektronik dan akan menjadi gelombang persegi di semua aplikasi kecuali yang paling menuntut.
Motor seperti itu dikenal sebagai motor DC tanpa sikat. Motor sinkron sejati digerakkan oleh bentuk gelombang sinus. Penggerak dua atau tiga fasa dapat digunakan dengan mensuplai jumlah belitan yang sesuai pada stator. Hanya 3 fase yang ditampilkan di atas.
Motor sinkron elektronik
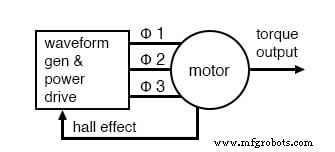
Diagram blok menunjukkan elektronik penggerak yang terkait dengan motor sinkron tegangan rendah (12 V DC). Motor ini memiliki sensor posisi terintegrasi di dalam motor, yang memberikan sinyal tingkat rendah dengan frekuensi yang sebanding dengan kecepatan putaran motor.
Sensor posisi bisa sesederhana sensor medan magnet solid-state seperti Hall effect perangkat yang menyediakan waktu pergantian (arah arus jangkar) ke elektronik penggerak. Sensor posisi dapat berupa sensor sudut beresolusi tinggi seperti resolver, inductosyn (magnetic encoder), atau optical encoder.
Jika kecepatan rotasi yang konstan dan akurat diperlukan, (seperti untuk drive disk) tachometer dan loop terkunci fase dapat disertakan (gambar di bawah). Sinyal takometer ini, rangkaian pulsa yang sebanding dengan kecepatan motor, diumpankan kembali ke loop fase-terkunci, yang membandingkan frekuensi dan fase takometer dengan sumber frekuensi referensi yang stabil seperti osilator kristal.
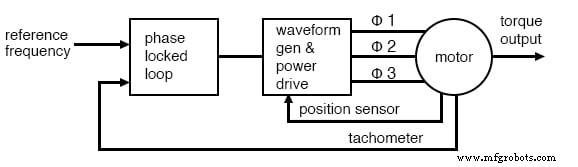
Loop fase-terkunci mengontrol kecepatan motor sinkron
Motor DC Tanpa Kuas
Motor yang digerakkan oleh gelombang persegi arus, seperti yang disediakan oleh sensor efek hall sederhana, dikenal sebagai motor DC brushless . Jenis motor ini memiliki torsi riak yang lebih tinggi variasi melalui revolusi poros dari gelombang sinus didorong motor. Ini bukan masalah bagi banyak aplikasi. Padahal, kami terutama tertarik pada motor sinkron di bagian ini.
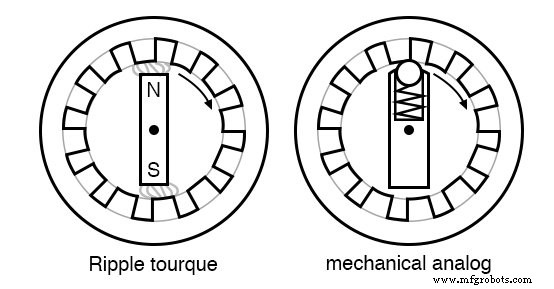
Torsi riak motor dan analog mekanis
Torsi riak, atau cogging, disebabkan oleh gaya tarik magnet kutub rotor ke potongan kutub stator. (Gambar di atas) Perhatikan bahwa tidak ada kumparan stator. Rotor PM dapat diputar dengan tangan tetapi akan mengalami tarikan pada potongan kutub saat berada di dekatnya.
Ini analog dengan situasi mekanis. Apakah torsi riak menjadi masalah bagi motor yang digunakan dalam pemutar kaset? Ya, kami tidak ingin motor secara bergantian mempercepat dan memperlambat saat memutar kaset melewati kepala pemutaran kaset. Apakah torsi riak menjadi masalah bagi motor kipas? Tidak.
Gulungan yang didistribusikan dalam sabuk menghasilkan medan yang lebih sinusoidal
Jika motor digerakkan oleh gelombang sinus arus sinkron dengan ggl balik motor, itu diklasifikasikan sebagai motor AC sinkron, terlepas dari apakah bentuk gelombang penggerak dihasilkan oleh sarana elektronik. Sebuah motor sinkron akan menghasilkan kembali sinusoidal ggl jika medan magnet stator memiliki distribusi sinusoidal.
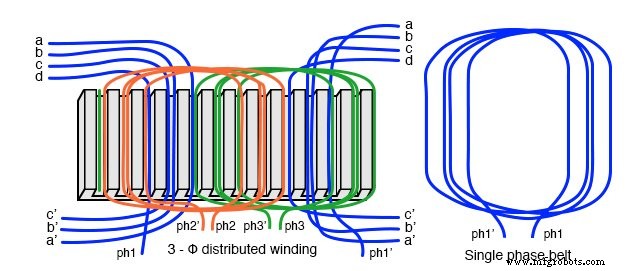
Akan lebih sinusoidal jika gulungan kutub didistribusikan dalam sabuk di banyak slot alih-alih terkonsentrasi pada satu kutub besar (seperti yang digambarkan di sebagian besar ilustrasi kami yang disederhanakan). Pengaturan ini membatalkan banyak harmonik ganjil medan stator.
Slot yang memiliki lebih sedikit belitan di tepi belitan fase dapat berbagi ruang dengan fase lainnya. Belt berliku dapat mengambil bentuk konsentris alternatif seperti yang ditunjukkan pada Gambar di bawah.
Sabuk konsentris
Untuk motor 2 fase, digerakkan oleh gelombang sinus, torsi konstan sepanjang putaran dengan identitas trigonometri:
sin2θ + cos2θ =1
Pembuatan dan sinkronisasi bentuk gelombang penggerak memerlukan indikasi posisi rotor yang lebih presisi daripada yang disediakan oleh sensor efek hall yang digunakan pada motor DC tanpa sikat. Seorang penyelesai , atau pengenkode optik atau magnetik , memberikan resolusi ratusan hingga ribuan bagian (pulsa) per putaran.
Resolver memberikan sinyal posisi sudut analog dalam bentuk sinyal yang sebanding dengan sinus dan cosinus sudut poros. Encoder memberikan indikasi posisi sudut digital dalam format serial atau paralel.
Penggerak gelombang sinus sebenarnya berasal dari PWM, Pulse Width Modulator , metode efisiensi tinggi untuk mendekati gelombang sinus dengan bentuk gelombang digital. Setiap fase memerlukan elektronik penggerak untuk pergeseran fase bentuk gelombang ini dengan jumlah yang sesuai per fase.
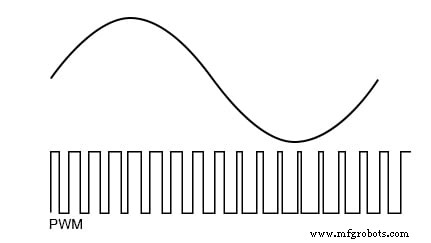
PWM mendekati gelombang sinus
Manfaat Motor Sinkron
Efisiensi motor sinkron lebih tinggi daripada motor induksi. Motor sinkron juga bisa lebih kecil, terutama jika magnet permanen berenergi tinggi digunakan di rotor. Munculnya elektronik solid-state modern memungkinkan untuk menggerakkan motor ini dengan kecepatan yang bervariasi.
Motor induksi banyak digunakan dalam traksi kereta api. Namun, motor sinkron kecil, yang dipasang di dalam roda penggerak, membuatnya menarik untuk aplikasi semacam itu. Superkonduktor suhu tinggi versi motor ini seperlima hingga sepertiga berat motor lilitan tembaga.
Motor sinkron superkonduktor eksperimental terbesar mampu mengemudikan kapal kelas perusak angkatan laut. Dalam semua aplikasi ini, penggerak kecepatan variabel elektronik sangat penting. Penggerak kecepatan variabel juga harus mengurangi tegangan penggerak pada kecepatan rendah karena penurunan reaktansi induktif pada frekuensi yang lebih rendah.
Untuk mengembangkan torsi maksimum, rotor perlu mengikuti arah medan stator sebesar 90°. Lagi pula, ia kehilangan sinkronisasi. Jauh lebih sedikit menghasilkan torsi yang berkurang. Dengan demikian, posisi rotor perlu diketahui secara akurat. Dan posisi rotor terhadap medan stator perlu dihitung dan dikontrol.
Jenis kontrol ini dikenal sebagai kontrol fase vektor . Ini diimplementasikan dengan mikroprosesor cepat yang menggerakkan modulator lebar pulsa untuk fase stator. Stator motor sinkron sama dengan motor induksi yang lebih populer.
Akibatnya, kontrol kecepatan elektronik tingkat industri yang digunakan dengan motor induksi juga berlaku untuk motor sinkron industri besar. Jika rotor dan stator dari motor sinkron rotari konvensional dibuka gulungannya, akan dihasilkan motor linier sinkron.
Jenis motor ini diterapkan pada pemosisian linier berkecepatan tinggi yang presisi.
LEMBAR KERJA TERKAIT:
- Lembar Kerja Teori Motor AC


