Motor Stepper
Motor Stepper vs Motor Servo
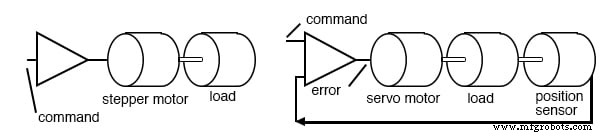
Sebuah motor langkah adalah versi "digital" dari motor listrik. Rotor bergerak dalam langkah-langkah diskrit seperti yang diperintahkan, daripada berputar terus menerus seperti motor konvensional. Saat berhenti tetapi diberi energi, stepper (kependekan dari motor stepper) menahan bebannya dengan stabil dengan menahan torsi .
Penerimaan luas motor stepper dalam dua dekade terakhir didorong oleh munculnya elektronik digital. Elektronik driver solid-state modern adalah kunci keberhasilannya. Dan, mikroprosesor siap berinteraksi dengan sirkuit driver motor stepper.
Dari segi aplikasi, pendahulu motor stepper adalah motor servo. Saat ini, ini adalah solusi biaya yang lebih tinggi untuk aplikasi kontrol gerakan berkinerja tinggi. Biaya dan kerumitan servomotor disebabkan oleh komponen sistem tambahan:sensor posisi dan penguat kesalahan) Ini masih merupakan cara untuk memposisikan beban berat di luar jangkauan stepper daya yang lebih rendah.
Akselerasi tinggi atau akurasi tinggi yang luar biasa masih membutuhkan motor servo. Jika tidak, defaultnya adalah stepper karena elektronik penggerak sederhana, akurasi bagus, torsi bagus, kecepatan sedang, dan biaya rendah.
Motor stepper vs motor servo
Motor stepper memposisikan kepala baca-tulis dalam floppy drive. Mereka pernah digunakan untuk tujuan yang sama di hard drive. Namun, kecepatan dan akurasi tinggi yang diperlukan untuk pemosisian kepala hard drive modern memerlukan penggunaan servomotor linier (kumparan suara).
Penguat servo adalah penguat linier dengan beberapa komponen diskrit yang sulit diintegrasikan. Upaya desain yang cukup besar diperlukan untuk mengoptimalkan penguatan servo vs respons fase ke komponen mekanis. Driver motor stepper adalah sakelar solid-state yang tidak terlalu rumit, baik "hidup" atau "mati". Dengan demikian, pengontrol motor stepper tidak terlalu rumit dan mahal dibandingkan pengontrol motor servo.
Slo-syn motor sinkron dapat berjalan dari tegangan saluran AC seperti motor induksi kapasitor permanen satu fasa. Kapasitor menghasilkan 90° fase kedua. Dengan tegangan saluran langsung, kami memiliki penggerak 2 fase.
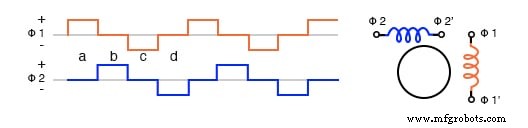
Mendorong bentuk gelombang bipolar (±) gelombang persegi 2-24V lebih umum akhir-akhir ini. Medan magnet bipolar juga dapat dihasilkan dari unipolar (satu polaritas) tegangan yang diterapkan ke ujung alternatif belitan sadap tengah (gambar di bawah).
Dengan kata lain, DC dapat dialihkan ke motor sehingga melihat AC. Saat belitan diberi energi secara berurutan, rotor menyinkronkan dengan medan magnet stator yang diakibatkannya. Jadi, kami memperlakukan motor stepper sebagai kelas motor sinkron AC.
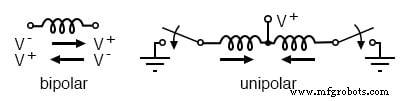
Penggerak unipolar dari kumparan yang disadap tengah di (b), mengemulasi arus AC dalam kumparan tunggal di (a)
Karakteristik
Motor stepper kasar dan murah karena rotor tidak mengandung cincin selip berliku atau komutator. Rotor adalah padatan silindris, yang mungkin juga memiliki kutub menonjol atau gigi halus. Lebih sering daripada tidak, rotor adalah magnet permanen.
Anda dapat menentukan bahwa rotor adalah magnet permanen dengan rotasi tangan tanpa daya yang menunjukkan torsi penahan , pulsa torsi. Kumparan motor stepper dililitkan di dalam stator yang dilaminasi, kecuali untuk can stack konstruksi. Mungkin ada sedikitnya dua fase berliku atau sebanyak lima.
Fase-fase ini sering dibagi menjadi pasangan. Dengan demikian, motor stepper 4 kutub mungkin memiliki dua fase yang terdiri dari pasangan kutub sejajar yang berjarak 90° terpisah. Mungkin juga ada beberapa pasangan kutub per fase. Misalnya, stepper 12 kutub memiliki 6 pasang kutub, tiga pasang per fase.
Karena motor stepper tidak perlu berputar terus menerus, tidak ada peringkat tenaga kuda. Jika mereka berputar terus menerus, mereka bahkan tidak mendekati kemampuan pengenal tenaga kuda sub-fraksional. Mereka benar-benar perangkat berdaya rendah yang kecil dibandingkan dengan motor lain.
Mereka memiliki peringkat torsi hingga seribu in-oz (inci-ons) atau sepuluh N-m (newton-meter) untuk unit ukuran 4 kg. Sebuah stepper ukuran "sepeser pun" kecil memiliki torsi seperseratus newton-meter atau beberapa inci-ons. Kebanyakan stepper berdiameter beberapa inci dengan torsi n-m atau beberapa inci.
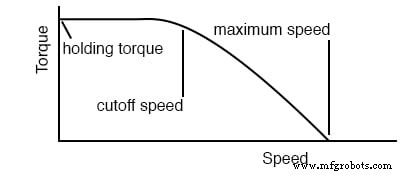
Torsi yang tersedia adalah fungsi dari kecepatan motor, inersia beban, torsi beban, dan elektronik penggerak seperti yang diilustrasikan pada kurva kecepatan vs torsi di bawah. Stepper penahan yang bertenaga memiliki torsi penahan yang relatif tinggi peringkat. Torsi yang tersedia untuk motor yang sedang berjalan lebih sedikit, menurun ke nol pada kecepatan tinggi tertentu.
Kecepatan ini seringkali tidak dapat dicapai karena resonansi mekanis dari kombinasi beban motor.
Karakteristik kecepatan stepper
Motor stepper bergerak selangkah demi selangkah, sudut langkah ketika bentuk gelombang drive diubah. Sudut langkah terkait dengan detail konstruksi motor:jumlah kumparan, jumlah kutub, jumlah gigi. Bisa dari 90° hingga 0,75° , sesuai dengan 4 hingga 500 langkah per putaran.
Elektronik penggerak dapat mengurangi separuh sudut langkah dengan menggerakkan rotor dalam setengah langkah .
Stepper tidak dapat mencapai kecepatan pada kurva kecepatan-torsi secara instan. Frekuensi mulai maksimum adalah tingkat tertinggi di mana stepper berhenti dan diturunkan dapat dimulai. Beban apa pun akan membuat parameter ini tidak dapat dicapai.
Dalam praktiknya, kecepatan langkah ditingkatkan selama memulai dari jauh di bawah frekuensi awal maksimum. Saat menghentikan motor stepper, kecepatan langkah mungkin dikurangi sebelum berhenti.
Torsi maksimum di mana stepper dapat mulai dan berhenti adalah torsi tarik . Beban torsi pada stepper ini disebabkan oleh beban gesek (rem) dan inersia (roda gila) pada poros motor. Setelah motor mencapai kecepatan, torsi tarik adalah torsi maksimum yang berkelanjutan tanpa kehilangan langkah.
Ada tiga jenis motor stepper dalam urutan peningkatan kompleksitas:keengganan variabel, magnet permanen, dan hibrida. Variabel reluktansi stepper memiliki rotor baja lunak padat dengan kutub yang menonjol. Stepper magnet permanen memiliki rotor magnet permanen berbentuk silinder.
Stepper hybrid memiliki gigi baja lunak yang ditambahkan ke rotor magnet permanen untuk sudut langkah yang lebih kecil.
Variabel Reluctance Stepper
Motor stepper keengganan variabel bergantung pada fluks magnet yang mencari jalur keengganan terendah melalui sirkuit magnetik. Ini berarti bahwa rotor magnet lunak berbentuk tidak beraturan akan bergerak untuk melengkapi sirkuit magnetik, meminimalkan panjang celah udara dengan reluktansi tinggi.
Stator biasanya memiliki tiga belitan yang didistribusikan di antara pasangan kutub, rotor empat kutub menonjol, menghasilkan 30° sudut langkah. Stepper yang tidak diberi energi tanpa torsi penahan saat tangan diputar dapat diidentifikasi sebagai stepper tipe reluktansi variabel.
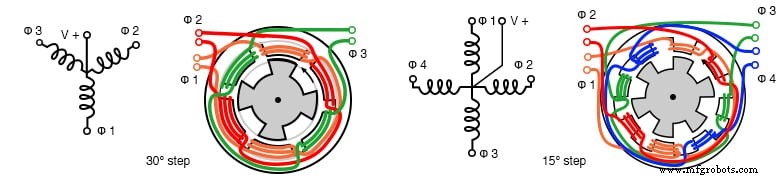
Motor stepper reluktansi variabel tiga fase dan empat fase
Bentuk gelombang penggerak untuk stepper 3-φ dapat dilihat di bagian “Reluctance motor”. Drive untuk stepper 4-φ ditunjukkan pada Gambar di bawah. Pergantian fase stator secara berurutan menghasilkan medan magnet berputar yang diikuti oleh rotor.
Namun, karena jumlah kutub rotor yang lebih sedikit, rotor bergerak lebih kecil dari sudut stator untuk setiap langkah. Untuk motor stepper reluktansi variabel, sudut langkah diberikan oleh:
S =360o/NS R =360o/NR ΘST =ΘR - S dimana:S =sudut stator, R =Sudut rotor, ST =sudut langkah NS =jumlah kutub stator, NP =jumlah kutub rotor
Urutan langkah untuk variabel reluctance stepper
Pada gambar di atas, bergerak dari 1 ke 2, dst., medan magnet stator berputar searah jarum jam. Rotor bergerak berlawanan arah jarum jam (CCW). Perhatikan apa yang tidak terjadi! Gigi rotor putus-putus tidak berpindah ke gigi stator berikutnya. Sebaliknya, medan stator 2 menarik gigi yang berbeda dalam menggerakkan CCW rotor, yang merupakan sudut yang lebih kecil (15° ) dari sudut stator 30° .
Sudut gigi rotor 45° masuk ke dalam perhitungan dengan persamaan di atas. Rotor memindahkan CCW ke gigi rotor berikutnya pada 45° , tetapi sejajar dengan CW sebesar 30° gigi stator. Jadi, sudut langkah sebenarnya adalah perbedaan antara sudut stator sebesar 45° dan sudut rotor 30°.
Seberapa jauh stepper akan berputar jika rotor dan stator memiliki jumlah gigi yang sama? Nol—tidak ada notasi.
Mulai saat istirahat dengan fase 1 diberi energi, tiga pulsa diperlukan (φ2, 3, 4) untuk menyelaraskan gigi rotor “bertitik” ke Gigi stator CCW berikutnya, yaitu 45° . Dengan 3-pulsa per gigi stator dan 8 gigi stator, 24-pulsa atau langkah menggerakkan rotor melalui 360° .
Dengan membalik urutan pulsa, arah putaran dibalikkan ke kanan atas. Arah, laju langkah, dan sejumlah langkah dikendalikan oleh pengontrol motor stepper yang memberi makan driver atau amplifier. Ini dapat digabungkan menjadi satu papan sirkuit.
Pengontrol bisa berupa mikroprosesor atau sirkuit terintegrasi khusus. Pengemudi bukanlah penguat linier, tetapi sakelar hidup-mati sederhana yang mampu mengalirkan arus yang cukup tinggi untuk memberi energi pada stepper. Pada prinsipnya, driver dapat berupa relay atau bahkan sakelar sakelar untuk setiap fase. Dalam praktiknya, drivernya berupa sakelar transistor diskrit atau sirkuit terintegrasi.
Baik driver dan pengontrol dapat digabungkan menjadi satu sirkuit terpadu yang menerima perintah langsung dan pulsa langkah. Ini mengeluarkan arus ke fase yang tepat secara berurutan.
Motor stepper reluktansi variabel
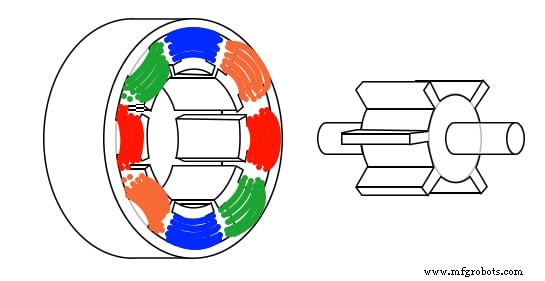
Anda dapat membongkar reluctance stepper untuk melihat komponen internal. Konstruksi internal motor stepper reluktansi variabel ditunjukkan pada gambar di atas. Rotor memiliki kutub yang menonjol sehingga dapat ditarik ke medan stator yang berputar saat diaktifkan. Motor sebenarnya lebih panjang dari ilustrasi sederhana kami.
Variable reluctance stepper drive lead screw
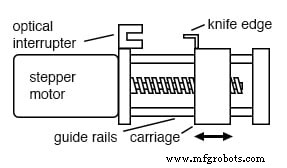
Poros sering dilengkapi dengan sekrup penggerak (gambar di atas). Ini dapat memindahkan kepala floppy drive atas perintah pengontrol floppy drive.
Motor stepper reluktansi variabel diterapkan ketika hanya tingkat torsi sedang yang diperlukan dan sudut langkah kasar memadai. Drive sekrup, seperti yang digunakan dalam drive floppy disk, adalah aplikasi semacam itu. Saat pengontrol menyala, ia tidak mengetahui posisi kereta.
Namun, ini dapat mengarahkan media ke pengganggu optik, mengkalibrasi posisi di mana ujung pisau memotong pengganggu sebagai "rumah". Kontroler menghitung pulsa langkah dari posisi ini. Selama torsi beban tidak melebihi torsi motor, pengontrol akan mengetahui posisi carriage.
Ringkasan:motor stepper keengganan variabel
- Rotor adalah silinder besi lunak dengan kutub menonjol (menonjol).
- Ini adalah motor stepper yang paling tidak rumit dan paling murah.
- Satu-satunya tipe stepper tanpa torsi penahan pada putaran tangan dari poros motor yang tidak diberi energi.
- Sudut langkah besar
- Sekrup timah sering dipasang ke poros untuk gerakan loncatan linier.
Stepper Magnet Permanen
Motor stepper magnet permanen memiliki rotor magnet permanen berbentuk silinder. Stator biasanya memiliki dua belitan. Gulungan dapat disadap di tengah untuk memungkinkan unipolar rangkaian driver di mana polaritas medan magnet diubah dengan mengalihkan tegangan dari satu ujung ke ujung lainnya dari belitan.
Seorang bipolar penggerak polaritas bolak-balik diperlukan untuk memberi daya pada belitan tanpa keran tengah. Stepper magnet permanen murni biasanya memiliki sudut langkah yang besar. Rotasi poros motor yang tidak diberi energi menunjukkan torsi yang menahan. Jika sudut penahannya besar, katakan 7,5° hingga 90° , kemungkinan ini adalah stepper magnet permanen daripada stepper hibrida.
Motor stepper magnet permanen memerlukan arus bolak-balik bertahap yang diterapkan pada dua (atau lebih) belitan. Dalam praktiknya, ini hampir selalu berupa gelombang persegi yang dihasilkan dari DC oleh elektronik solid-state.
bipolar drive adalah gelombang persegi bolak-balik antara (+) dan (-) polaritas, katakanlah, +2,5 V hingga -2,5 V. Unipolar drive memasok fluks magnet (+) dan (-) bolak-balik ke kumparan yang dikembangkan dari sepasang gelombang persegi positif yang diterapkan ke ujung berlawanan dari kumparan yang disadap di tengah. Waktu gelombang bipolar atau unipolar adalah penggerak gelombang, langkah penuh, atau setengah langkah.
Penggerak Gelombang
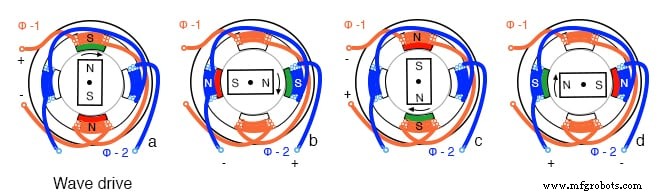
Urutan penggerak gelombang PM (a) 1+ , (b) 2+ , (c) 1- , (d) 2-
Secara konseptual, drive paling sederhana adalah wave drive . Urutan putaran dari kiri ke kanan adalah positif -1 poin rotor kutub utara ke atas, (+) -2 poin rotor utara kanan, negatif -1 menarik rotor utara ke bawah, (-) -2 poin rotor kiri. Bentuk gelombang penggerak gelombang di bawah ini menunjukkan bahwa hanya satu kumparan yang diberi energi pada suatu waktu. Meskipun sederhana, ini tidak menghasilkan torsi sebanyak teknik penggerak lainnya.
Bentuk gelombang:penggerak gelombang bipolar
Bentuk gelombang (gambar di atas) adalah bipolar karena kedua polaritas, (+) dan (-) menggerakkan stepper. Medan magnet kumparan terbalik karena polaritas arus penggerak terbalik.
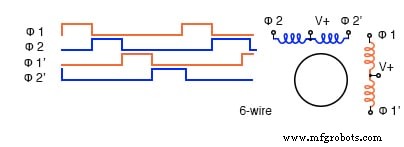
Bentuk gelombang:penggerak gelombang unipolar
Bentuk gelombang (gambar di atas) adalah unipolar karena hanya satu polaritas yang diperlukan. Ini menyederhanakan elektronik drive tetapi membutuhkan driver dua kali lebih banyak. Ada dua kali lebih banyak bentuk gelombang karena sepasang gelombang (+) diperlukan untuk menghasilkan medan magnet bolak-balik dengan aplikasi ke ujung berlawanan dari kumparan yang disadap tengah.
Motor membutuhkan medan magnet bolak-balik. Ini dapat dihasilkan oleh gelombang unipolar atau bipolar. Namun, kumparan motor harus memiliki center tap untuk drive unipolar.
Motor stepper magnet permanen diproduksi dengan berbagai konfigurasi kawat timah.
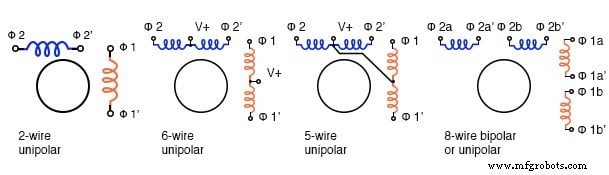
Diagram pengkabelan motor stepper
- Motor 4-kawat hanya dapat digerakkan oleh bentuk gelombang bipolar.
- Motor 6-kawat, pengaturan paling umum, ditujukan untuk penggerak unipolar karena ketukan tengah. Padahal, itu mungkin didorong oleh gelombang bipolar jika center tap diabaikan.
- Motor 5-kawat hanya dapat digerakkan oleh gelombang unipolar, karena keran tengah umum mengganggu jika kedua belitan diberi energi secara bersamaan.
- Konfigurasi 8-kawat jarang terjadi tetapi memberikan fleksibilitas maksimum. Ini mungkin kabel untuk drive unipolar seperti untuk motor 6-kawat atau 5-kawat. Sepasang kumparan dapat dihubungkan secara seri untuk penggerak arus rendah bipolar tegangan tinggi, atau secara paralel untuk penggerak arus tinggi tegangan rendah.
Sebuah belitan bifilar dihasilkan dengan melilitkan kumparan dengan dua kabel secara paralel, seringkali berupa kawat berenamel merah dan hijau. Metode ini menghasilkan rasio putaran 1:1 yang tepat untuk belitan yang disadap tengah. Metode penggulungan ini berlaku untuk semua kecuali susunan 4-kawat di atas.
Drive Langkah Penuh
Langkah penuh drive memberikan torsi lebih dari gelombang drive karena kedua kumparan diberi energi pada waktu yang sama. Ini menarik kutub rotor di tengah-tengah antara dua kutub medan. (Gambar di bawah)
Langkah penuh, penggerak bipolar
Penggerak bipolar langkah penuh, seperti yang ditunjukkan di atas, memiliki sudut langkah yang sama dengan penggerak gelombang. Penggerak unipolar (tidak diperlihatkan) akan membutuhkan sepasang bentuk gelombang unipolar untuk masing-masing bentuk gelombang bipolar di atas yang diterapkan pada ujung belitan yang disadap tengah. Drive unipolar menggunakan sirkuit driver yang tidak terlalu rumit dan lebih murah. Biaya tambahan untuk penggerak bipolar dapat dibenarkan jika diperlukan lebih banyak torsi.
Perjalanan Setengah Langkah
Sudut langkah untuk geometri motor langkah tertentu dipotong setengah dengan setengah langkah menyetir. Ini sesuai dengan pulsa langkah dua kali lebih banyak per putaran. (Gambar di bawah) Half stepping memberikan resolusi yang lebih besar dalam pemosisian poros motor.
Misalnya, setengah langkah motor menggerakkan kepala cetak melintasi kertas printer inkjet akan menggandakan kerapatan titik.
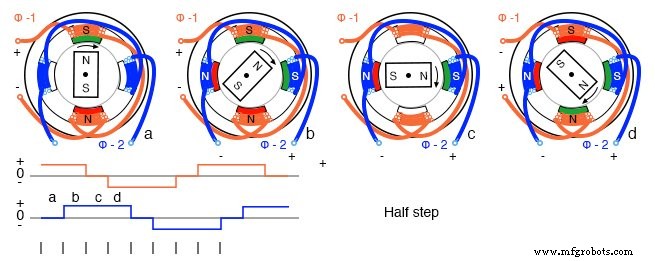
Setengah langkah, penggerak bipolar
Penggerak setengah langkah adalah kombinasi penggerak gelombang dan penggerak langkah penuh dengan satu belitan yang diberi energi, diikuti oleh kedua belitan yang diberi energi, menghasilkan langkah dua kali lebih banyak. Bentuk gelombang unipolar untuk penggerak setengah langkah ditunjukkan di atas. Rotor sejajar dengan kutub medan seperti untuk penggerak gelombang dan di antara kutub seperti untuk penggerak langkah penuh.
Microstepping dimungkinkan dengan pengontrol khusus. Dengan memvariasikan, arus ke belitan secara sinusoidal banyak langkah mikro dapat diinterpolasi di antara posisi normal. Konstruksi motor stepper magnet permanen sangat berbeda dari gambar di atas.
Diinginkan untuk meningkatkan jumlah kutub di luar yang diilustrasikan untuk menghasilkan sudut langkah yang lebih kecil. Juga diinginkan untuk mengurangi jumlah lilitan, atau setidaknya tidak menambah jumlah lilitan untuk kemudahan pembuatan.
Konstruksi
Konstruksi motor stepper magnet permanen sangat berbeda dari gambar di atas. Diinginkan untuk meningkatkan jumlah kutub di luar yang diilustrasikan untuk menghasilkan sudut langkah yang lebih kecil. Juga diinginkan untuk mengurangi jumlah lilitan, atau setidaknya tidak menambah jumlah lilitan untuk kemudahan pembuatan.
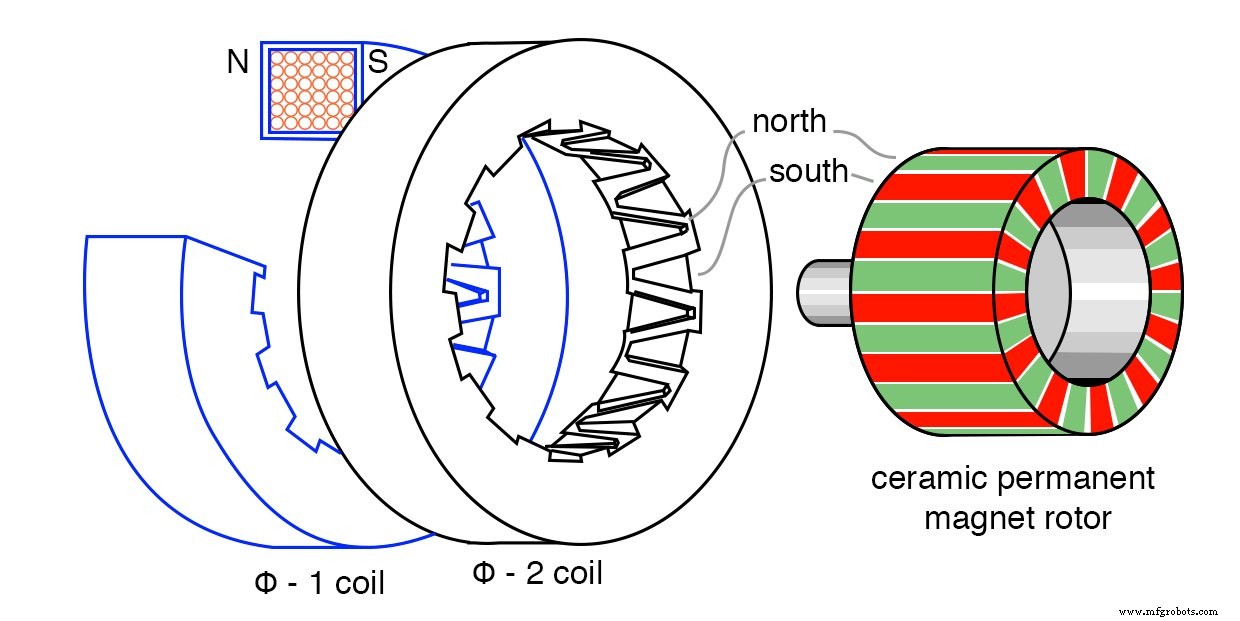
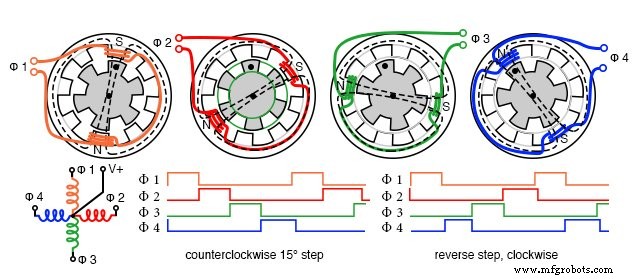
Motor stepper magnet permanen, konstruksi can-stack 24 tiang
Stepper magnet permanen hanya memiliki dua belitan, namun memiliki 24 kutub di masing-masing dua fase. Gaya konstruksi ini dikenal sebagai dapat ditumpuk . Gulungan fase dibungkus dengan cangkang baja ringan, dengan jari-jari dibawa ke tengah.
Satu fase, secara sementara, akan memiliki sisi utara dan selatan. Setiap sisi membungkus ke tengah donat dengan dua belas jari interdigitated untuk total 24 tiang. Jari-jari utara-selatan yang berselang-seling ini akan menarik rotor magnet permanen.
Jika polaritas fase dibalik, rotor akan melompat 360° /24 =15° . Kami tidak tahu arah mana, yang tidak berguna. Namun, jika kita memberi energi -1 diikuti oleh -2, rotor akan bergerak 7,5° karena -2 diimbangi (diputar) sebesar 7,5° dari -1. Lihat di bawah untuk offset. Dan, itu akan berputar ke arah yang dapat direproduksi jika fase berganti-ganti.
Penerapan salah satu bentuk gelombang di atas akan memutar rotor magnet permanen.
Perhatikan bahwa rotor adalah silinder keramik ferit abu-abu yang dimagnetisasi dalam pola 24 kutub yang ditunjukkan. Ini dapat dilihat dengan film penampil magnet atau serbuk besi yang diaplikasikan pada kertas pembungkus. Padahal, warna akan menjadi hijau untuk kutub utara dan selatan dengan film tersebut.
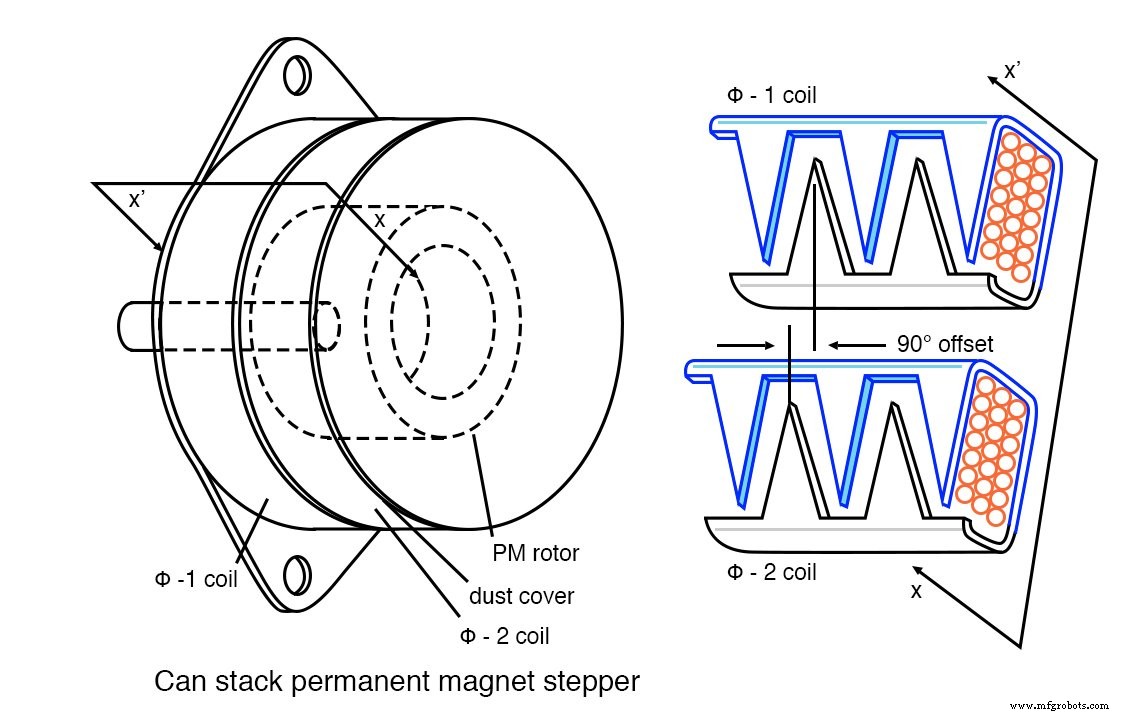
(a) Tampilan eksternal can stack, (b) detail offset bidang
Konstruksi gaya tumpukan kaleng dari stepper PM khas dan mudah diidentifikasi dengan "kaleng" yang ditumpuk (gambar di atas). Perhatikan offset rotasi antara bagian dua fase. Ini adalah kunci untuk membuat rotor mengikuti peralihan medan antara dua fase.
Ringkasan:motor stepper magnet permanen
- Rotor adalah magnet permanen, sering kali selongsong ferit dimagnetisasi dengan banyak kutub.
- Konstruksi can-stack menyediakan banyak tiang dari satu kumparan dengan jari-jari besi lunak yang disisipkan.
- Sudut langkah besar hingga sedang.
- Sering digunakan pada printer komputer untuk memajukan kertas.
Motor Stepper Hibrida
motor langkah hibrida menggabungkan fitur stepper keengganan variabel dan stepper magnet permanen untuk menghasilkan sudut langkah yang lebih kecil. Rotor adalah magnet permanen berbentuk silinder, termagnetisasi sepanjang sumbu dengan gigi besi lunak radial.
Kumparan stator dililitkan pada kutub bolak-balik dengan gigi yang sesuai. Biasanya ada dua fase belitan yang didistribusikan di antara pasangan kutub. Belitan ini mungkin disadap tengah untuk penggerak unipolar. Ketukan tengah dicapai dengan belitan bifilar , sepasang kabel dililit secara fisik secara paralel tetapi dihubungkan secara seri.
Kutub utara-selatan dari polaritas pertukaran fase ketika arus penggerak fase dibalik. Penggerak bipolar diperlukan untuk belitan yang tidak disadap.
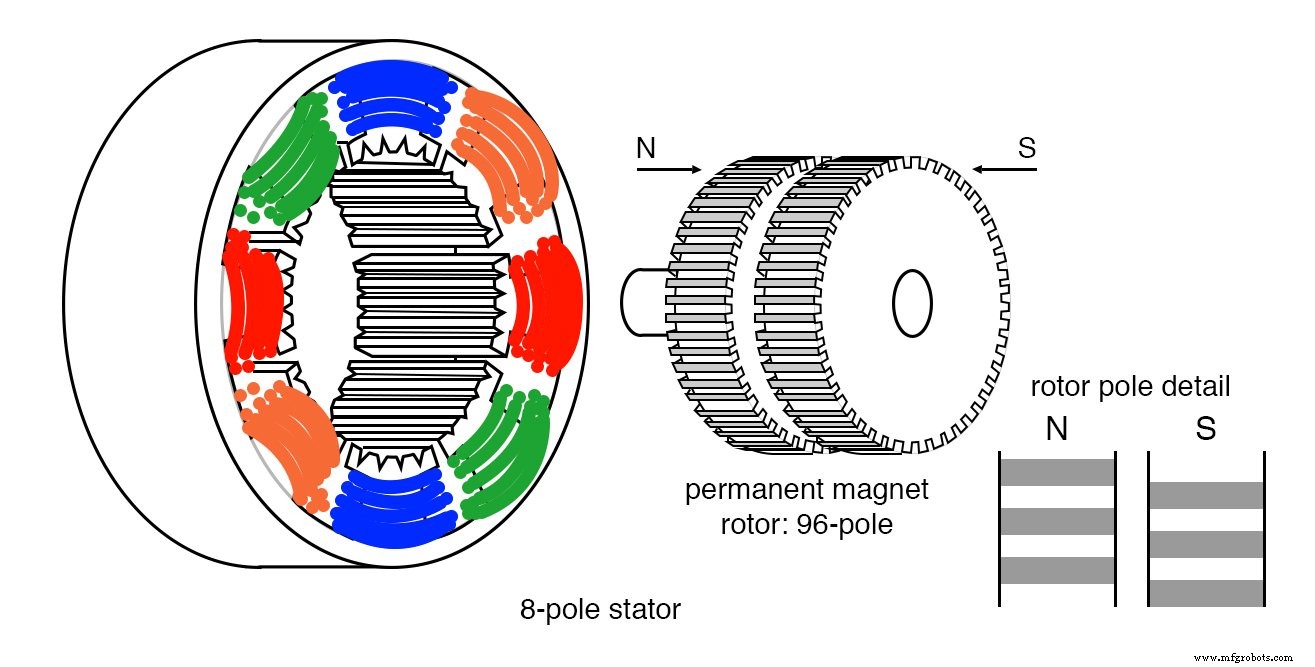
Motor stepper hibrida
Perhatikan bahwa 48-gigi pada satu bagian rotor diimbangi dengan setengah nada dari yang lain. (Lihat detail kutub rotor di atas. Offset gigi rotor ini juga ditunjukkan di bawah.) Karena offset ini, rotor secara efektif memiliki 96 kutub yang disisipkan dengan polaritas yang berlawanan.
Offset ini memungkinkan rotasi dalam 1/96 langkah revolusi dengan membalikkan polaritas medan satu fase. Gulungan dua fase yang umum seperti yang ditunjukkan di atas dan di bawah. Padahal, mungkin ada sebanyak lima fase.
Gigi stator pada 8 kutub sesuai dengan gigi 48 rotor, kecuali gigi yang hilang di ruang antara kutub. Jadi, satu kutub rotor, katakanlah kutub selatan, dapat sejajar dengan stator dalam 48 posisi berbeda. Namun, gigi kutub selatan diimbangi dari gigi utara dengan setengah gigi.
Oleh karena itu, rotor dapat sejajar dengan stator dalam 96 posisi berbeda. Offset setengah gigi ini ditunjukkan pada detail kutub rotor di atas atau Gambar di bawah.
Seolah-olah ini belum cukup rumit, kutub utama stator dibagi menjadi dua fase (φ-1, -2). Fase stator ini diimbangi satu sama lain dengan seperempat gigi. Detail ini hanya dapat dilihat pada diagram skematik di bawah ini. Hasilnya adalah rotor bergerak dalam langkah seperempat gigi ketika fase diberi energi secara bergantian.
Dengan kata lain, rotor bergerak dalam 2x96=192 langkah per putaran untuk langkah di atas.
Gambar di atas mewakili motor stepper hybrid yang sebenarnya. Namun, kami menyediakan representasi bergambar dan skema yang disederhanakan untuk mengilustrasikan detail yang tidak jelas di atas. Perhatikan pengurangan jumlah kumparan dan gigi di rotor dan stator untuk kesederhanaan.
Dalam dua gambar berikutnya, kami mencoba untuk mengilustrasikan seperempat putaran gigi yang dihasilkan oleh dua fase stator yang diimbangi oleh seperempat gigi, dan setengah offset gigi rotor. Offset seperempat gigi stator dalam hubungannya dengan pengaturan waktu arus penggerak juga menentukan arah rotasi.
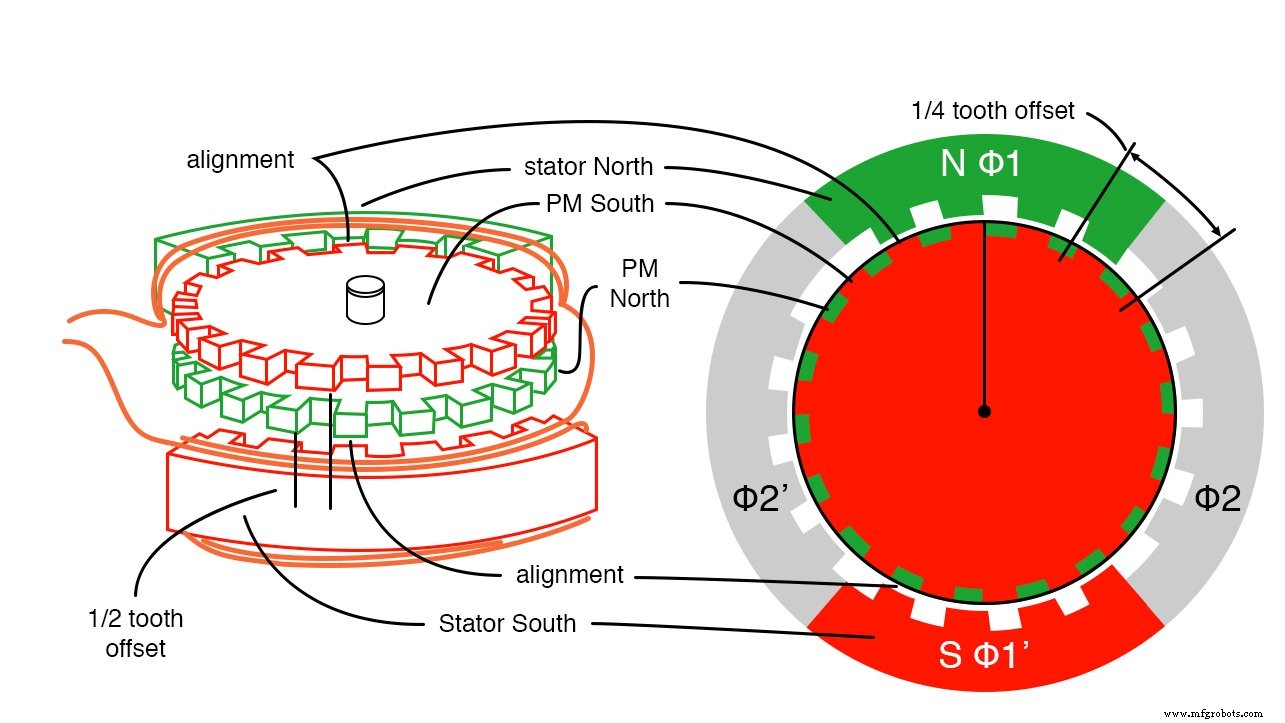
Diagram skema motor stepper hybrid
Fitur Skema Stepper Hibrida
- Bagian atas rotor magnet permanen adalah kutub selatan, utara bawah.
- Gigi utara-selatan rotor diimbangi oleh setengah gigi.
- Jika stator -1 diberi energi sementara di utara atas, selatan bawah.
- Gigi stator φ-1 atas sejajar utara dengan gigi selatan atas rotor.
- Gigi stator bawah -1’ sejajar dengan selatan ke gigi utara bawah rotor.
- Torsi yang cukup diterapkan pada poros untuk mengatasi torsi penahan akan menggerakkan rotor satu gigi.
- Jika polaritas -1 dibalik, rotor akan bergerak dengan setengah gigi, arahnya tidak diketahui. Penjajarannya adalah bagian atas stator selatan ke bagian bawah rotor utara, bagian bawah stator utara ke rotor selatan.
- Gigi stator -2 tidak sejajar dengan gigi rotor saat -1 diberi energi. Faktanya, gigi stator -2 diimbangi oleh seperempat gigi. Ini akan memungkinkan rotasi sebesar itu jika -1 tidak diberi energi dan -2 diberi energi. Polaritas -1 dan drive menentukan arah putaran.
-
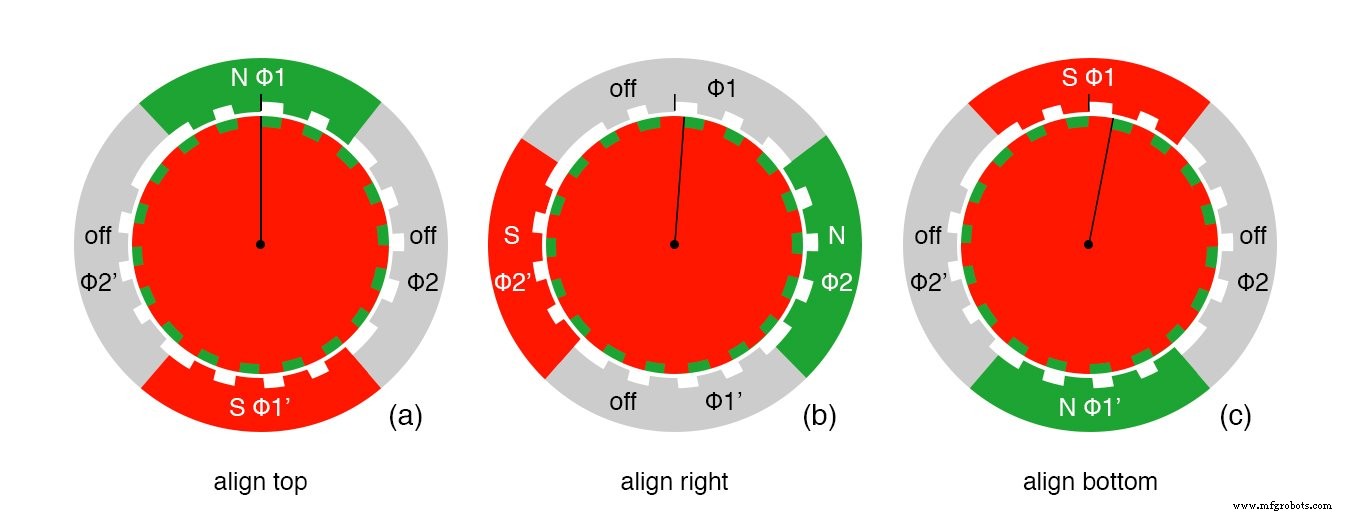
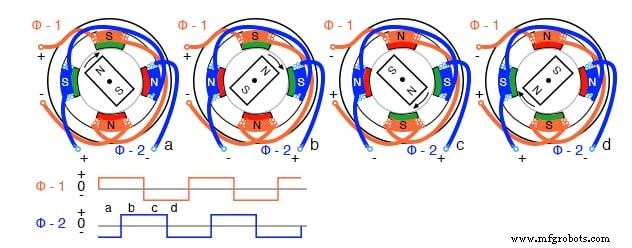
Urutan putaran motor stepper hybrid
Rotasi Motor Stepper Hibrida
- Rotor atas adalah magnet permanen selatan, bawah utara. Kolom 1, -2 dapat dialihkan:hidup, mati, mundur.
- (a) -1=on=utara-atas, -2=mati. Sejajarkan (atas ke bawah): -1 stator-N:rotor-atas-S, -1’ stator-S:rotor-bawah-N. Posisi awal, rotasi=0.
- (b) -1=mati, -2=hidup. Sejajarkan (kanan ke kiri): -2 stator-N-kanan:rotor-atas-S, -2’ stator-S:rotor-bawah-N. Putar 1/4 gigi, total rotasi=1/4 gigi.
- (c) -1=mundur(aktif), -2=mati. Sejajarkan (bawah ke atas): -1 stator-S:rotor-bottom-N, -1’ stator-N:rotor-top-S. Putar 1/4 gigi dari posisi terakhir. Rotasi total dari awal:1/2 gigi.
- Tidak ditampilkan:-1=mati, -2=mundur(hidup). Sejajarkan (kiri ke kanan): Rotasi total:3/4 gigi.
- Tidak ditampilkan:-1=on, -2=off (sama seperti (a)). Sejajarkan (atas ke bawah): Rotasi total 1-gigi.
Motor stepper tanpa daya dengan torsi penahan adalah stepper magnet permanen atau stepper hibrida. Stepper hibrida akan memiliki sudut langkah kecil, jauh lebih kecil dari 7,5° dari stepper magnet permanen. Sudut langkah bisa menjadi sebagian kecil dari derajat, sesuai dengan beberapa ratus langkah per revolusi. Ringkasan:Motor Stepper Hibrida
- Sudut langkah lebih kecil dari reluktansi variabel atau stepper magnet permanen.
- Rotor adalah magnet permanen dengan gigi halus. Gigi utara dan selatan diimbangi oleh setengah gigi untuk sudut langkah yang lebih kecil.
- Kutub stator memiliki gigi halus yang cocok dengan nada yang sama dengan rotor.
- Gulungan stator dibagi menjadi tidak kurang dari dua fase.
- Kutub dari satu belitan stator diimbangi oleh seperempat gigi untuk sudut langkah yang lebih kecil.
LEMBAR KERJA TERKAIT:
- Lembar Kerja Motor Stepper


